2018 International Conference on Computer, Electronic Information and Communications (CEIC 2018) ISBN: 978-1-60595-557-5
Improvement and Simulation of AODV Routing Algorithm Based on NS-3
Xiang-feng KONG, Wei-hong FAN and Xuan-ping CAI
National University of Defense Technology, Changsha, China
Keywords: AODV, Smart robot group, Motion control, Signal strength.
Abstract. In order to solve the problem of high packet loss rate and poor real-time performance of data transmission among the smart robots after the mobile ad hoc network is formed, we study and improve the traditional AODV routing protocol. Smart robot uses signal strength as a basis for whether to forward packets during route discovery in the proposed AODV and it will control their own motion after acknowledging the forwarding of packets. With NS-3 software the simulation results show that the improved AODV routing protocol improves the success rate of data transmission and reduces the average delay compared with the traditional AODV routing protocol.
Introduction
Mobile Ad Hoc Network is a distributed control center-less multi-hop network, in which all the nodes assume equal status, equipped with routing functions and able to join or leave the network, what’s more, there is no need to build infrastructure support for Mobile Ad Hoc Network. Therefore, Mobile Ad Hoc Network can be widely used in military and civilian area.
The existing Mobile Ad Hoc Networks can be categorized based on different features. That is, based on different routing discovery strategies, the existing Mobile Ad Hoc Networks can be categorized into proactive (table driven) routing protocol, reactive (on-demand)routing protocol and hybrid routing protocol[1]. In which AODV routing protocol falls into the type of reactive routing protocol, i.e. on-demand routing protocol. AODV routing protocol is based on DSDV [2] routing protocol, and is improved combining the thoughts of DSR [3] routing protocol, possessing the features of strong expandability as well as high environmental adaptability [4]. Currently the improvement of AODV routing protocol has, to some degree, enhanced its features in one aspect, but as for the features of mass communication data, high accuracy demand, as well as the high changing speed of network topology etc. during the moving process of smart robot group, the existing AODV routing protocol cannot meet the communication demand of smart robot group.
In order to solve this problem, we consider the signal strength as the criterion of whether the smart robot forwards the data packet in the process of route seeking, and the smart robot will control its movement state after it confirms and forwards the data packet.
AODV Routing Protocol Improvement and Protocol Evaluation
AODV Routing Protocol Improvement
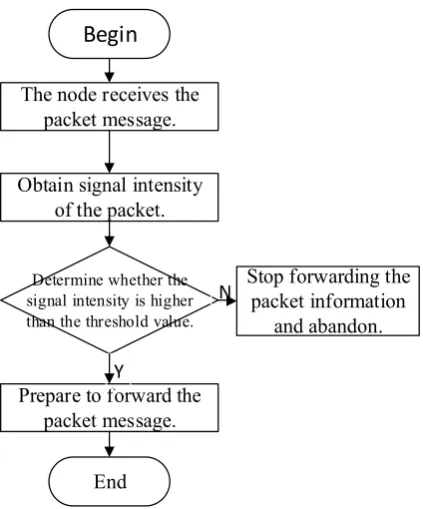
The operation of AODV routing protocol mainly includes two processes: route seeking and route maintenance [5]. The main improvement of the traditional AODV routing protocol is to add node location information and movement direction to the RREQ and RREP packets in the route seeking process of AODV routing protocol and to control the movement status of the smart robot. The specific improvements for traditional AODV routing protocol are as follows.
The node receives the packet message.
Obtain signal intensity of the packet.
Determine whether the signal intensity is higher than the threshold value.
Prepare to forward the packet message.
Stop forwarding the packet information
and abandon.
N
Y Begin
[image:2.595.185.397.67.322.2]End
Figure 1. Signal strength flowchart.
②Add node location information and movement direction to the RREQ and RREP packets.
Add node location inform ation and move ment direction to the RREQ and RREP packets[6].The modified RREQ packet message format and the format of the modified RREP packet message are as follows[1].
Table 1. RREQ packet message format.
Type JRGDU Reserved Hop Count RREQ ID
Destination IP Address Destination Sequence Number
Originator IP Address Originator Sequence Number
Node X Position Node Y Position Node Movement Direction
Table 2. RREP packet message format.
Type R A Reserved Prefix Length Hop Count RREQ ID
Destination IP Address Destination Sequence Number
Originator IP Address Lifetime Node X Position Node Y Position Node Movement Direction
Where, in the planar network, Node X Position is the X-direction position of the smart robot Node Y Position is the Y-position of the smart robot, and Node Movem ent Direction is the m ovement direction of the smart robot.
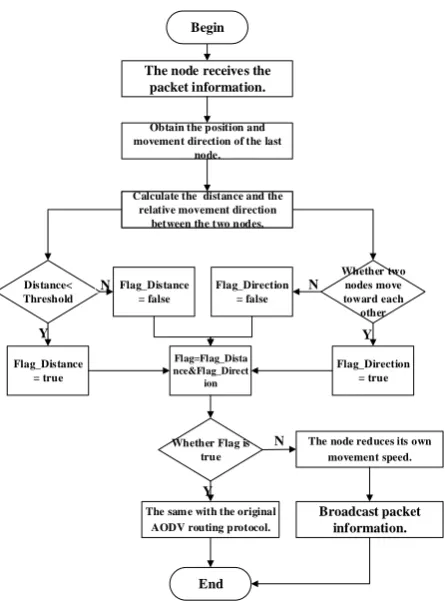
The smart robot receives the RREQ or RREP packet to obtain the previous smart robot's position information and direction of movement.And then, the smart robot calculates the relative distance and the relative move ment direction between the tw o nodes and judges whether the rela tive distance between the two nodes is greater than the set threshold or the two nodes are of opposite direction, if so, then the sm art robot will redu ce its own m ovement speed and fo rward the m essage, otherwise the
smart robot will send packet inform ation in accordance with the original AODV routin g
protocol.This algorithm flowchart is as the figure 2.
The node receives the packet information. Distance< Threshold Whether two nodes move toward each other Obtain the position and
movement direction of the last node.
计算两节点间距离和相对运动方 向
Flag_Distance = false Flag_Direction = false Flag_Distance = true Flag_Direction = true Flag=Flag_Dista nce&Flag_Direct ion
Whether Flag is true Calculate the distance and the
relative movement direction between the two nodes.
The node reduces its own movement speed.
The same with the original AODV routing protocol.
[image:3.595.48.523.61.364.2] [image:3.595.76.299.66.367.2]Broadcast packet information. Y Y N N N Y Begin End
Figure 2. Packet broadcast flowchart. Figure 3. Judgment of two-node movement direction.
Routing Protocol Evaluation Index
The main function of the routing protocol is to maintain the network topology and provide timely and accurate routing information for inter-node communication. We mainly chooses the successful data reception rate [7] and the average delay [8] as the main evaluation indicators to compare and evaluate the traditional AODV routing protocol and the improved AODV routing protocol.
Successful Data Reception Date. The statistics of successful data reception rate is the ratio of the
total received data pack ets and the total tran smitted data packets in the network. Through this indicator, the probability of successful data transmission in the entire network and the packet loss rate caused by network topology changes.This indicator can also well reflect the efficiency of this routing protocol in the process of data transmission, which is defined as follows:
_ = × 100% . (1)
Where _ is the successful data reception rate, is the total num ber of
received packets, and is the total number of packets sent.
Average Delay. The average delay statistics is the averag e time that a d ata packet in a network
successfully arrives at the routing layer of the destination node from the routing layer of the source node. The index reflects the smoothness of the network. The smaller the delay, the more smooth the network. The definition formula is as follows:
= . (2)
Where means the average delay, is the sum of all the data transfer time to the
destination node and is the number of all the data that reaches the destination node.
Simulation and Simulation Results Analysis. At present, there are many network sim ulation
softwares. After com paring variou s sim ulation soft wares, we select NS-3 sim ulation system to simulate the communication protocol.
Simulation Scenarios And Simulation Parameters. This simulation environment is NS-3.2.6 as
a simulation tool built on Ubuntu16.04 system.
A
B C
0 X
NS-3 network simulation[9] software. is used to build Ad Hoc network. The simulation scenario is
as follows: with a plane network s tructure, the coverage area of 200 × 200 , there are 30 nodes
distributed in the network scene, the distance between nodes is 30m, and each node adopts the same communication protocol.
In the simulation process, NS-3 randomly selects 5 nodes as the source nodes and 5 nodes as the destination nodes, random ly sele cts 10 random seeds for sim ulation and then m akes statistical analysis on the simulation results. The traditional AODV routing protocol simulation parameters and the improved AODV routing protocol simulation parameters are as follows:
Table 3. Traditional AODV routing protocol simulation parameters.
Simulation Parameters Value
EnergyDetectionT -96[db] Size 30
TxGain 0[db]
Separation Interval 1[s]
Packet Size 1[Kb]
Distance Threshold 35[m]
Table 4. Improved AODV routing protocol simulation parameters.
Simulation Parameters Value
EnergyDetectionT -88[db] Size 30
TxGain 3[db] SeparationInterval 1[S]
Speed Reduction Percentage 60%
Packet Size 1[Kb]
Distance Threshold 35[m]
EnergyDetectionT: Smart robots receive packet signal minimum signal strength.
Size: Smart robot group network size.
TxGain: Smart robot launch gain.
SeparationInterval: Smart robot contract interval.
Speed Reduction Percentage: Speed reduction percentage.
Distance Threshold: Judgment threshold of distance between smart robots.
In this simulation, different random seeds were adopted for simulation and the simulation results were statistically analyzed. The random seeds were: 54,123,98,46,125,687,215,987,32156,15468. The total data transm ission time is 50 seconds to 250 seconds. Each simulation time interval is 10 seconds. Each simulation robot speed is 1m / s, 3m / s, 5m / s. During the simulation, the simulation time is 1.5 times of the data transmission time for each simulation. The data transmission starts from 1/2 second of the data transmission time to 3/2 second of the total data transmission time. Taking the data transmission time as 50 seconds as an example, the sim ulation time is 75 seconds, and the data transmission ends from the 25th second to the 75th second.
Simulation Result
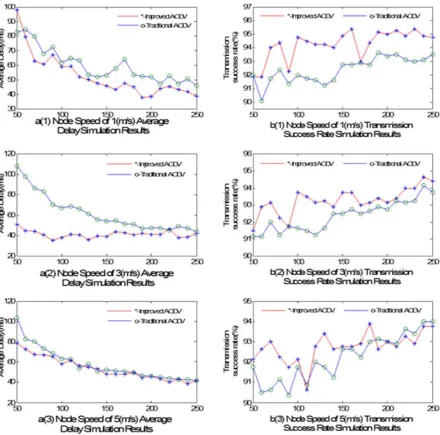
We compare the perform ance of the traditi onal AODV rou ting protocol and the improved AODV routing protocol. After the sim ulation, the sim ulation results are statistically analyzed and plotted. The result is shown in Figure 4.2.
In Figure 4.2, Figure a(1), Figure a(2) and Figure a(3) are simulation results of average delay. The abscissa shows the total time of data transmission in s, and the vertical axis represents the draw delay, in units of m s. Figure b(1), Figure b(2) and Figure b( 3) is the simulation results of the success ful transfer rate of data, abscissa indicates the total time of data transmission, the unit is s,and the vertical axis shows the data transfer rate. Figure a (1) and Figure b(1) is the simulation results of smart robot
speed of 1 / , Figure a(2) and Figure b(2) is the simulation results of smart robot speed of 3 / ,
Figure 4. Experimental simulation results.
In Figure 4.2, it can be seen from Figure a (1), Figure a (2) and Figure a (3) that the average delay of the improved AODV routing protocol is lower than that of the traditional AODV routing protocol, and the lower the smart robot speed, the more obvious the advantages of the improved AODV routing protocol. It also can be seen from Figure b (1), Figure b (2) and Figure b (3) that the success rate of the im proved AODV r outing protocol data transm ission is obviously higher than that of the traditional AODV routing protocol, and also the lower the smart robot speed, the m ore obvious the advantages of the im proved AODV routing prot ocol. Therefore, the improved AODV routing protocol has better data transmission efficiency and lower average latency.
Conclusion
References
[1] Linxing Chen, Xi Zeng, Yi Cao. Mobile Ad Ho c Networks - Self-Organized Packet Radio
Network Technology [M], second ed. Beijing: Publishing House of Electronics Industry, 2012 [2] PERKINS C, BHAGWAT P.Highly dynam ic dest ination sequenced dist ance vector routing (DSDV) formobile computers [J]. ACM SI G-COMM Computer Comm unication Review, 1994, 24(4):234- 244.
[3] Alfawaer Z M, Hua G W, Ha mdeh N A. Utilization of AODV in wireless ad hoc networks [J]. Journal of Computer Science, 2007, 3(4).
[4] Kumar M, Rishi R, Madan D K. Comparative Analysis of CBRP, DSR, AODV Routing Protocol in MANET [J]. International Journal on Computer Science & Engineering, 2010, 2(9).
[5] Zhongheng Wang, Xihuang Zhang. Optimization of AODV routing protocol in mobile Ad Hoc networks [J] .journal of Computer Applications, 2010,30 (02): 333-336.
[6] Cong Lin, Xiaobing Yuan, Baoqing Li. An Improved AODV Routing Algorithm Based on NS-3 [J]. Information Technology, 2016, (12): 25-29.
[7] Paul A B, Konwar S, Gogoi U, et al. Implementation and Performance Evaluation of AODV in Wireless Mesh Networks using NS-3[C]// Intern ational Conference on Education Technology and Computer. IEEE, 2010:V5-298 - V5-303.
[8] Xiuli Chang. Research and Simulation of Ad Hoc Network Routing Protocol Based on NS-3 [D]. Harbin Institute of Technology, 2010.