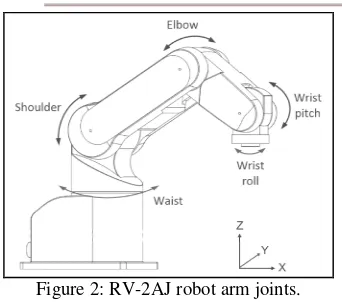
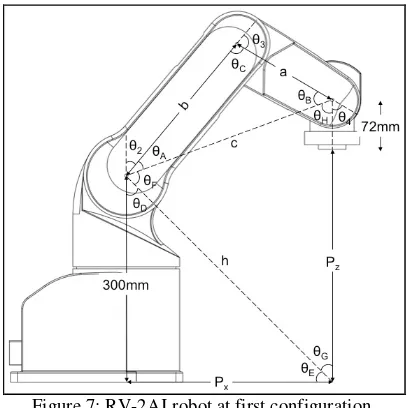
Inverse kinematics analysis of a 5 Axis RV 2AJ robot manipulator
Full text
Figure



Related documents
GAMR [17] , a genetic algorithm based mapping and routing approach addresses a two phase mapping of IP cores onto NoC architecture and generates a deterministic dead-lock
Recent Faddeev results for (d,p) on a light target show that core excitation is important for single-nucleon transfer, and the magnitude of the e ff ect is strongly dependent on
The teaching and learning theories that impact the workplace learning, factors influencing workplace based learning, identifying opportunities for learning to occur
• Used for running or stopping the inverter, setting or referencing parameters, and monitoring output frequency, output current, or similar items through CANopen communication with
The heart of the agile methodology, particularly as it’s used in BI, is rapid prototyping that enables developers to take user stories, consolidate them in business models,
The errors were determined by the result from Praat analysis in the form of the percentage and then the pronunciation value of the participants were compared with that
Rock samples were taken from several outcrops of Upper Devonian carbonates in the Rocky Mountain Front Ranges and from four drill cores from the stratigraphically equivalent
We computed the Pearson correlation coefficients between the chewing function score and oral health-related quality of life (OHRQoL, as measured using the summary score of the
