2018 2nd International Conference on Applied Mathematics, Modeling and Simulation (AMMS 2018) ISBN: 978-1-60595-580-3
Truss Size Optimization by Using Ratio-Extremum Method: Considering
Self-weight Loads, Static and Dynamic Constraints
Di-sheng OU
1, Xiong-xin ZHOU
1, Mao-hua Lin
2and C.T. Tsai
2,*1Engineering Training Center, Guangxi University of Science and Technology, Liuzhou 545006, China
2Department of Ocean & Mechanical Engineering, Florida Atlantic University, 777 Glades Road, Boca Raton, FL 33431, USA
*Corresponding author
Keywords: Truss size optimization, Self-weight loads, Static and dynamic constraints, Ratio-Extremum method, Step-size factor.
Abstract. For structural self-weight loads being important component in the loads, ignoring self-weight loads cannot be considered as reasonable approximation. In addition, the constraints of stresses, displacements and frequencies must be simultaneously considered to satisfy the requirements of engineering structures. According to the saddle point theory, Ratio-Extremum method is firstly proposed to solve the size optimization problem of the truss simultaneously considering self-weight loads, static and dynamic constraints. It is a great advantage that the step-size factors can be directly determined. Two cases of 72-bar special truss are used to show the effectivity and rationality.
Introduction
For heavy or precision structures, such as tower crane and high-precision antenna, structural self-weight loads are important component of the loads. Self-weight loads do greatly affect on the process and result of structural optimization, and greatly change structural configuration. These are also verified by the results of continuous topology optimization considering self-weight loads [1].
For engineering structures, the constraints of stresses, displacements and frequencies must be simultaneously considered to meet the actual needs [2]. Most of the optimization methods discussed the problems considering static and dynamic constraints, still used numerical examples of only static problems or dynamic problems [3,4,5].
To solve the optimization problems of the truss considering self-weight loads, static and dynamic constraints, it is to firstly discuss how to iteratively solve Lagrangian multipliers and cross-sectional areas, and automatically determine their step-size factors, according to the saddle point theory by using the characteristics of structural functional sensitivities.
Optimality Conditions
For the size optimization, the minimum weight of the truss under the constraints of axial stresses, nodal displacements and forbidden frequencies can be expressed as:
1
σ
u
ω
ω
L U
min
s.t. [ ] 1 0 ( 1, 2, , )
[ ] 1 0 ( 1, 2, , )
1 [ ] 0 ( 1, 2, , )
[ ] 1 0 ( 1, 2, , )
N
n n n n
n n n
i i i
j j j
s s s
W L A
g n N
g u u i I
g j J
g s S
A A A A A
0 A A A
Wherein, A denotes the vector composed by cross-sectional areas. W(A) is the objective function. γn is specific weight of the nth bar, An is its cross-sectional area, and Ln is its length. gσn(A) denotes axial stress constraint of the nth bar, σn is axial stress, and [σn] is its allowable value. gui(A) denotes the displacement constraint of the ith node, ui is the component of nodal displacement vector, [ui] is its allowable value. gωj(A) denotes the upper limit constraint of the jth frequency, ωj is the jth frequency, [ωj] is the upper limit. gωs(A) denotes the lower limit constraint of the sth frequency, ωs is the sth frequency, [ωs] is the lower limit. AL≤ A ≤ AU are the limits of cross-sectional areas; AL≥0 means some elements can be deleted.
An essential extremum condition of Augmented Lagrangian function of Problem 1 is:
* U
* * L * U
* L
0 ( )
, 0 ( ) ( 1, 2, )
0 ( )
m m
m m m
m m
A A
L A A A m = ,N
A A
A λ
. (2) Wherein, λ* is the vector of Lagrangian multipliers on the optimal point A*.
The dual problem of Problem 1 can be expressed as:
max min
s.t. 0
L ,
A
λ A λ
λ
(3) Then, its essential extremum condition is
1
0
N
n
n n m m
A
L L
A
. (4)
Ratio-extremum Method
Step 1, solving the multipliers iteratively. The iterative solution can be written as:
k1 k k k
λ
λ λ d . (5)
Wherein, β is the step-size factor, and dλ is its searching direction. And, k denotes the kth step.
By using the left second term in Eq.4, the searching direction is determined by
T
1 2 j J
g g g g
λ
d
. (6) Wherein, gj denotes the jth constraint.
By using the second sub-equation of Eq.2 and Eq.4, the solution of the optimal step-size factor can be determined by [6]
T
T
2
A
λ λ
λ λ λ
d d
d G G d . (7)
Wherein, GA denotes Jacobi matrix for partial derivatives of the constraints, and Gλ denotes
Jacobi matrix for partial derivatives of the constraints and the objective. If any of the multipliers is not greater than zero, the corresponding constraint term is set to be zero.
Step 2, solving the design-variables iteratively. The iterative solution can be written as:
k 1 k k k p
A A d
it can be derived as:
2g g o
m m m m
A h h h
, (9)
o 2 σ 1 1 2 u 1 1
o o
1[ ] 1[ ]
N I
n i
m m n m m m m i m m m
n n i i
h A L A L
u
C K k K P
eK k K P, (10)
g g
g σ 1 1 u 1 1
g g
1 1
T 2 T 2
ω ω
T T
1 1
2 2
[ ] [ ]
2 2 .
[ ] 2 [ ] 2
N I
n i
m m n m m m m i m m m
n n m i i m
J S
m j m m s m
j s
m m m m m m
j j j s s s
h A L A L
A u A
A L A L
C k e k
k M k M
P P
K K P K K P
M M
(11) Wherein, K-1is the inverse matrix of the global stiffness matrix. And, km is the mth element’s unit stiffness matrix expanded to the same order as the global stiffness matrix. M is the global mass matrix of the truss. Mm is the mth element’s unit mass matrix expanded to the same order as the global mass matrix. Pg is nodal self-weight load vector. Po is nodal external load vector. ei is the unit row vector with the ith component being 1 and others being zero. Cm is the row vector formed by the linear combination of the unit row vectors.
If the term in the square root of Eq.9 is not negative, the components of searching direction vector can be directly determined:
2g g o
pm m m m m
d A h h h
. (12) Otherwise, the components are determined by the third sub-equation of Eq.2, i.e.,
L
pn n n
d A A
. (13) The step-size factor of cross-sectional areas is set to be:
Tp p L L A A d d
. (14) If any of cross-sectional areas is less than the lower limit, set the corresponding component of the vectors to be zero.
The above two steps will be repeated until the termination conditions occur.
Numerical Examples
To compare the results obtained from the proposed method with others, a 72-bar spatial truss as shown in Fig.1 with self-weight loads will be presented.
The elastic modulus E is 68.95 GPa, and the specific weight of materials γ is 2767.99 kg/m3. The lumped masses at 1st to 4th node are MC=2268 kg. The external loads at 1st node are Px=22.25 KN,
Py=-22.25 KN and Pz=-22.25 KN.
Figure 1. 72-bar spatial truss.
The initial cross-sectional area of the bars is set to be 4×10-4 m2. The lower limit is 1×10-7 m2, and the upper limit is 0.03 m2. The initial design point is out of the area composed of all constraints, and then the initial value of multipliers is set to be 0.
In the case with forbidden frequency band, its termination condition is to satisfy all of the constraints. In another case without forbidden frequency band, its termination condition is the relative weight between two iterations being not greater than 10–7. The optimization results are shown in Table 1.
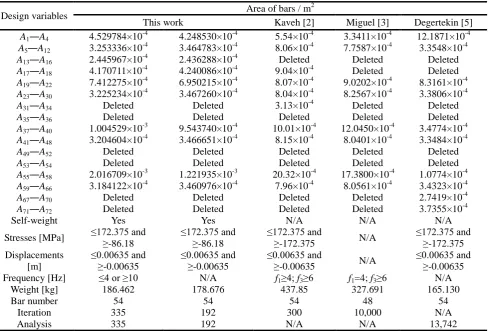
Table 1. Comparisons with other methods for 72-bar spatial truss.
Design variables Area of bars / m
2
This work Kaveh [2] Miguel [3] Degertekin [5]
A1―A4 4.529784×10 -4
4.248530×10-4 5.54×10-4 3.3411×10-4 12.1871×10-4 A5―A12 3.253336×10-4 3.464783×10-4 8.06×10-4 7.7587×10-4 3.3548×10-4
A13―A16 2.445967×10-4 2.436288×10-4 Deleted Deleted Deleted
A17―A18 4.170711×10-4 4.240086×10-4 9.04×10-4 Deleted Deleted
A19―A22 7.412275×10 -4
6.950215×10-4 8.07×10-4 9.0202×10-4 8.3161×10-4 A23―A30 3.225234×10-4 3.467260×10-4 8.04×10-4 8.2567×10-4 3.3806×10-4
A31―A34 Deleted Deleted 3.13×10-4 Deleted Deleted
A35―A36 Deleted Deleted Deleted Deleted Deleted
A37―A40 1.004529×10-3 9.543740×10-4 10.01×10-4 12.0450×10-4 3.4774×10-4
A41―A48 3.204604×10-4 3.466651×10-4 8.15×10-4 8.0401×10-4 3.3484×10-4
A49―A52 Deleted Deleted Deleted Deleted Deleted
A53―A54 Deleted Deleted Deleted Deleted Deleted
A55―A58 2.016709×10 -3
1.221935×10-3 20.32×10-4 17.3800×10-4 1.0774×10-4 A59―A66 3.184122×10-4 3.460976×10-4 7.96×10-4 8.0561×10-4 3.4323×10-4
A67―A70 Deleted Deleted Deleted Deleted 2.7419×10-4
A71―A72 Deleted Deleted Deleted Deleted 3.7355×10-4
Self-weight Yes Yes N/A N/A N/A
Stresses [MPa] ≤172.375 and ≥-86.18 ≤172.375 and ≥-86.18 ≤172.375 and ≥-172.375 N/A ≤172.375 and ≥-172.375
Displacements [m]
≤0.00635 and
≥-0.00635 ≤0.00635 and ≥-0.00635 ≤0.00635 and ≥-0.00635 N/A ≤0.00635 and ≥-0.00635
Frequency [Hz] ≤4 or ≥10 N/A f1≥4; f3≥6 f1=4; f3≥6 N/A
Weight [kg] 186.462 178.676 437.85 327.691 165.130
[image:4.595.56.546.449.780.2]Conclusion
According to the saddle point theory, Ratio-Extremum method for the size optimization is proposed by using the characteristics of the truss functions. The step-size factors can be directly derived and automatically calculated.
For the 72-bar spatial truss with self-weight loads, in the case with the constraints of axial stresses and nodal displacements, the proposed method only needs 192 analysis number, and the optimization weight of 178.676 kg is about 8.2% more than the weight of 165.130 kg presented by Degertekin [5] without considering self-weight loads.
Moreover, in another case with the constraints of axial stresses, nodal displacements, and forbidden frequency band of 4-10Hz, the proposed method needs 335 iterations, and the optimization weight of 186.462 kg is about 43.1% less than the weight of 327.691 kg presented by Miguel [3] without considering self-weight loads.
Acknowledgement
This work was supported by Guangxi University of Science & Technology (XKB15z06).
References
[1] X. Huang, Y.M. Xie, Evolutionary topology optimization of continuum structures including design-dependent self-weight loads, Finite Elements in Analysis and Design. 47(2011) 942-948.
[2] A. Kaveh, A. Zolghadr, Topology optimization of trusses considering static and dynamic constraints using the CSS, Applied Soft Computing. 13(2013) 2727-2734.
[3] L.F.F. Miguel, Shape and size optimization of truss structures considering dynamic constraints through modern metaheuristic algorithms, Expert Systems with Applications. 39(2012) 9458-9467.
[4] H.M. Gomes, Truss optimization with dynamic constraints using a particle swarm algorithm, Expert Systems with Applications. 38(2011) 957-968.
[5] S.O. Degertekin, Improved harmony search algorithms for sizing optimization of truss structures, Computers and Structures. 92-93(2012) 229-241.
[6] X.X. Zhou, D.S. Ou, Application of optimal step-size factor methods in truss sizing optimization, Chinese Journal of Applied Mechanics. 31(2014) 551-555 (In Chinese).
[7] D.S. Ou, X.X. Zhou, Work-ratio-extremum method for topology optimization of trusses subjected to loads including self-weight, Engineering Mechanics. 28(2011)136-142 (In Chinese).