2017 2nd International Conference on Artificial Intelligence and Engineering Applications (AIEA 2017)
ISBN: 978-1-60595-485-1
Stability Analysis and Stabilization Strategy for
Discrete Networked Control Systems
XIAOMING YU, GUANGDA LIU, YINGNAN WU and JING NING
ABSTRACT
For discrete networked control systems (NCSs) with random and bounded network transmission delay, sufficient conditions which make state-feedback NCSs asymptotically stable are derived by the Lyapunov-Krasovskii functional and linear matrix inequality (LMI). By matrix transformation, sufficient conditions above are converted to controller design methods which make the state-feedback control system asymptotically stable. The simulation proves that the system conservativeness is reduced.
KEYWORDS
Discrete networked control systems, network transmission delay, asymptotical stability.
INTRODUCTION
Network transmission delay is the main factor degrading the performance of NCSs and even destabilizing the NCSs and is also the source making the analysis and synthesis of NCSs more complex and difficult. In essence, NCSs is a kind of time delay system and its time delay is uncertain and time-varying, therefore, the related theory of time delay system can be used to analyze and synthesize the NCSs.
Lyapunov-Krasovskii’s laws [1-4] is the most commonly used method for stability analysis of time delay systems. Compared with usual Lyapunov-Razumikhin’s laws [5-7], Lyapunov-Krasovskii’s laws use Lyapunov functional to replace traditional Lyapunov function in order to obtain sufficient conditions for stability of system, which can effectively reduce the conservatism of stability margin, that is, the upper bound of the maximum allowable network transmission delay is obtained [8-10].
Lyapunov-Krasovskii’laws are used to study stability of the state feedback NCSs [3]. More concise Lyapunov functional and stronger upper bound constraints with less conservative are adopted [11], meanwhile, given parameters in advance are not necessary compared with the methods provided by literature [3]. On the basis of the above work, the stability analysis method and stabilization strategy of continuous time NCSs are extended to discrete time NCSs in the paper.
_________________________________________
MATHEMATICAL DESCRIPTION
The following lemma is necessary.
Lemma [11]: Assume that we have vectors a, b and matrix N of appropriate
dimension, for any matrices X, Y and Z satisfying matrix inequation
0
T
X Y
Y Z
There will exists following inequation
, ,
2 inf
T T
T T
X Y Z
a X Y N a
a Nb
b Y N Z b
Considering the following discrete system
( 1) ( ) ( ) ( ) ( ) ( ) ( )
x k Ax k Bu k E k
z k Cx k D k
(1)
Where x k( ), u k( ), ( )k and z k( ) are state vector, control input vector, external
disturbance vector and output vector, respectively. The matrices A, B, E, C and D are of known constant matrices with appropriate dimensions.
Network transmission delays sc( )k from sensor node to controller node and ca( )k
from controller node to actuator node can be amalgamated in total network transmission delay ( )k of NCSs described as
( )k sc( )k ca( )k
Total network transmission delay ( )k is bounded, namely, ( ) [0, ]k , where
is the upper bound of the total network transmission delay. Based on the above discussion of network transmission delay, the state feedback control law has the following form
( ) ( ( ))
u k Fx k k (2)
Where F is controller with appropriate dimensions. By considering controller
described by formula (2) and control plant described by formula (1), mathematical description of state feedback discrete NCSs is obtained
( 1) ( ) ( ( )) ( )
( ) ( ) ( )
x k Ax k BFx k k E k
z k Cx k D k
(3)
Formula (3) is the research object of this paper.
STABILITY ANALYSIS OF STATE FEEDBACK DISCRETE NCSS
The sufficient conditions for the asymptotic stability of the state feedback discrete NCSs are given in the form of theorem and proved in this section.
Theorem 1: For state feedback discrete NCSs described by formula (3), if there exists symmetric positive definite matrices P, Q, S, a symmetric matrix M and a
0 T M Y Y Q
(4)
Where 11 12
21 22 M M M M M
and
1 2 Y Y Y . 11 12
21 22 23
32 33
( ) 0 ( )
( ) ( ) ( )
( ) 0 ( )
T
m m
x k x k
V k x k x k
x k x k
(5) Where 11 12 21
22 22 2 2
23 12 2 1
32 12 1 2
33 11 1 1
ˆ + ( ) ( ) ˆ + ( ) ˆ + ( ) ˆ ˆ + + ˆ ˆ ˆ T T T T
T T T T
T T T T T
T
T
T
A PA P A I Q A I S
A PBF A I QBF
F B PA F B Q A I
F B PBF F B QBF M Y Y S
M Y Y
M Y Y
M Y Y
Then the state feedback discrete NCSs described by formula (3) can be asymptotically stabilized via control laws F, whenever network transmission delay satisfying ( ) [0, ]k .
Proof: Construct a Lyapunov functional as
1 2 3
( ) ( ) ( ) ( )
V k V k V k V k (6)
Where
1 1 +1 2 1 3 ( ) ( ) ( )( ) ( ) ( 1) ( ) ( 1)
( ) ( ) ( )
m T
k
T T
i j k i k
T i k
V k x k Px k
V k x j x j Q x j x j
V k x i Sx i
Besides, P , Q and S are symmetric positive definite matrices. By simply
calculating based on formula (6), the following conclusion is gotten easily.
( ) 0
V k (7)
By calculating the difference for Lyapunov functional (6), we get the following equations.
1( )= ( 1) ( 1) ( ) ( )
T T
V k x k Px k x k Px k
(8)
1
2( )=ˆ ( 1) ( ) ( 1) ( ) ( 1) ( ) ( 1) ( )
m k
T T T T
i k
V k x k x k Q x k x k x i x i Q x i x i
Where ˆ=( m). At the same time, we consider the following zero equation
( ) ( )
m 1
( 1) ( )
0k m
i k
x k x k x i x i
(11)Let's left multiply both sides of equation (11) by 2 ( )T
k N
,where vector
( )
( )
( )
m
x k k
x k
and matrix
1
2
N N
N
are of appropriate dimension. We get the
following equation.
1
( )
2 ( ) [ ( )T ( ( ))] k 2 ( ) [ ( 1)T ( )] 0
i k k
k N x k x k k k N x i x i
(12)Based on above lemma, for given symmetric matrix 11 12
21 22
M M
M
M M
and matrix
1
2
Y Y
Y
satisfying the following inequation
0
T
M Y
Y Q
(13)
We have following inequation
1
11 1 1 12 1 2
12 2 1 22 2 2
( ) ˆ ˆ ( )
0 ( 1) ( ) ( 1) ( )
( ) ˆ ˆ ( )
m
T T T k
T
m m
T T
i k
x k M Y Y M Y Y x k
x i x i Q x i x i
x k M Y Y M Y Y x k
(14)
Combine equation (8), equation (9), equation (10) and inequality (14), we can get the upper bound constraint inequality
11 1 1 12 1 2 12 2 1 22 2 2
ˆ
( ) ( 1) ( 1) ( ) ( )+ ( 1) ( ) ( 1) ( ) + ( ) ( ) ( ) ( )
( ) ˆ ˆ ( )
+
( ) ˆ ˆ ( )
T T T T T T
T T T
m m
T T
V k x k Px k x k Px k x k x k Q x k x k x k Sx k x k Sx k x k M Y Y M Y Y x k
x k M Y Y M Y Y x k
(15)
When the asymptotic stability of the control system is considered, it is not necessary to introduce external disturbance, that is, ( ) 0k . The state feedback
discrete NCSs described by the formula (3) can be changed into the following form
( 1) ( ) ( ( ))
( ) ( )
x k Ax k BFx k k
z k Cx k
(16)
11 12
21 22 23
32 33
( ) 0 ( )
( ) ( ) ( )
( ) 0 ( )
T
m m
x k x k
V k x k x k
x k x k
(17)
Based on Lyapunov stability theory, the state feedback discrete NCSs described by formula (3) can be asymptotically stabilized via control laws F when inequality (17)
is satisfied. So far, the theorem is proved.
STABILIZATION STRATEGY OF STATE FEEDBACK NCSS
Asymptotically stable state feedback controller design strategy for discrete NCSs is given and proved in form of theorem in this section.
Theorem 2: For state feedback discrete NCSs described by formula (3), If there exists symmetric positive definite matrix P and S, symmetric matrix 11 12
21 22
= M M
M M M ,
matrices G and 1
2 Y Y Y
satisfying the following LMIs.
1 1 1
22 2 2 12 2 1
12 1 2 11 1 1
1 1
1 1
+ 0 0
ˆ ˆ
0
ˆ ˆ
0 0 0 0
0 0
1
0 0
ˆ
T T
T T T T T T
T T
P S P A P A I
M Y Y S M Y Y G B G B
M Y Y M Y Y
AP BG P
A I P BG Q
(18)
11 12 1
21 22 2
1
1 2
0
T T
M M Y
M M Y
Y Y P
(19)
Then the state feedback discrete NCSs described by formula (3) can be asymptotically stabilized via control laws F GP, whenever network transmission
delay satisfying ( ) [0, ]k .
Proof: By equivalent transformation of matrix inequality (17) and using Schur complement property[12], we get the following equality.
22 2 2 12 2 1
12 1 2 11 1 1
1 1 0 0 ˆ ˆ 0 ˆ ˆ
0 0 0
0
0 0
1
0 0
T T
T T T T T T
T T
m
P S A A I
M Y Y S M Y Y F B F B
M Y Y M Y Y
A BF P
A I BF Q
(20)
1
1
1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
P P P I I and 1 1 1 0 0 0 0 0 0 P P P
Then we get
1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
22 2 2 12 2 1
1 1 1 1 1 1 1 1 1 1 1 1
12 1 2 11 1 1
1 1 1
1 1
+ 0 0
ˆ ˆ
0
ˆ ˆ
0 0 0
0 0
0 0
T T
T T T T T T
T T
P P SP P A P A I
P M P P Y P P Y P P SP P M P P Y P P Y P P F B P F B
P M P P Y P P Y P P M P P Y P P Y P
AP BFP P
A I P BFP
1 0 1 ˆQ (21) And
1 1 1 1 1 1
11 12 1
1 1 1 1 1 1
21 22 2
1 1 1 1 1 1
1 2
0
T T
P M P P M P P Y P
P M P P M P P Y P
P Y P P Y P P QP
(22)
Introduce the following definitions
1 1 1 1
11 12
11 12
1 1 1 1
21 22 21 22 1 1 1 1 1 1 2 2 1 1 1
P M P P M P
M M
P M P P M P
M M
P Y P Y
P Y P Y
S P SP
G FP We have
1 1 1
22 2 2 12 2 1
12 1 2 11 1 1
1 1
1 1
+ 0 0
ˆ ˆ
0
ˆ ˆ
0 0 0 0
0 0
1
0 0
ˆ
T T
T T T T T T
T T
P S P A P A I
M Y Y S M Y Y G B G B
M Y Y M Y Y
AP BG P
A I P BG Q
(23) And
11 12 1
21 22 2
1 1
1 2
0
T T
M M Y
M M Y
Y Y P QP
(24)
Let’s assume there exists the relation PQ, which is feasible because the matrices P and Q are any given symmetric matrix with appropriate dimensions. Although this
solving LMIs. Considering relation PQ, the following inequalities conditions are
obtained based on inequalities (23) and (24).
1 1 1
22 2 2 12 2 1
12 1 2 11 1 1
1 1
1 1
+ 0 0
ˆ ˆ
0
ˆ ˆ
0 0 0 0
0 0
1
0 0
ˆ
T T
T T T T T T
T T
P S P A P A I
M Y Y S M Y Y G B G B
M Y Y M Y Y
AP BG P
A I P BG P
(25)
11 12 1
21 22 2
1
1 2
0
T T
M M Y
M M Y
Y Y P
(26)
So far, the theorem 2 is proved
SIMULATION
0.6 0.5 0.1 0.5
( 1) ( ) ( ) ( )
0 0.71 0.1 0.2
x k x k u k k
(27)
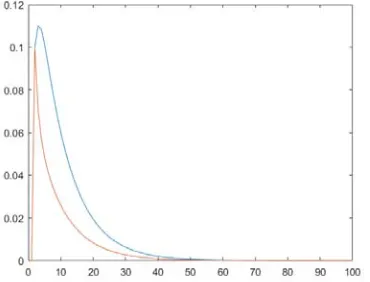
For above system (27), State feedback controller are designed by Mei YU[5] and Xiaoming Yu[13] respectively. Impulse response curves are shown in Figure 1 and Figure 2 respectively. And the maximum network transmission delays are 3 and 5 sampling periods respectively.
[image:7.612.206.391.423.564.2]Figure 2. impulse response curve of Xiaoming Yu controller.
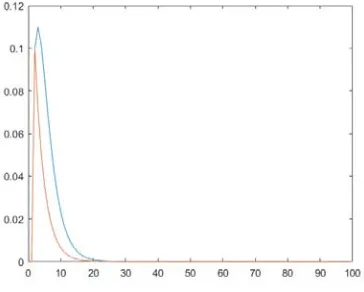
Figure 3. impulse response curve of theorem 2.
For the same system, the state feedback controller using theorem 2 is designed and the impulse response curve is shown in Figure 3. And the network transmission delays is between 2 and 5 sampling periods in Figure 3.
Obviously, the controller designed by theorem 2 takes less time to return to balance position. And simulation results also prove that controller designed by theorem 2 reduces the conservatism of the stability margin than the method in Figure 1.
CONCLUSION
State feedback discrete NCSs with uncertain and bounded network transmission delay is modelled and the mathematical model is established. And then, The stability analysis of discrete NCSs is carried out, and the design method of state feedback controller making system asymptotically stable is given. Finally, the simulation proves the feasibility and superiority of the method to design state feedback controller.
ACKNOWLEDGEMENTS
[image:8.612.206.388.243.389.2]REFERENCES
1. Young Soo Moon, Poogyeon Park, Wook Hyun Kwon. Delay-dependent robust stabilization of uncertain state-delayed systems [J]. International journal of control, 2001,74 (14): 1447-1455. 2. Dong Yue, Qinglong Han, Chen Peng. State feedback controller design of networked control
systems [C], Proceedings of the 2004 IEEE international conference on control applications, 2004, 242-247.
3. Dong Yue, Qinglong Han, Chen Peng. State feedback controller design of networked control systems [J]. IEEE Transactions on circuits and systems II: express briefs, 2004, 51 (11): 640-644. 4. Chen Peng, Dong Yue. Network-based robust H-infinitycontrol of systems with state-delay and
uncertainty [J]. ACTA Automatica Sinica, 2007, 33 (10): 1093-1096.
5. Mei Yu, Long Wang, Tianguang Chu. An LMI approach to networked control systems with data packet dropout and transmission delays [C]. Proceedings of the decision and control conference, IEEE, 2004, 3545-3550.
6. Dexiao Xie, Xiaodong Han, He Huang, Zhiquan Wang. H-infinity state feedback control for networked control system with time-delay and packet dropout [J]. Control and decision, 2009, 24 (4): 587-597.
7. Wu Wang, Qiongbin Lin, Fuwen Yang. H-infinity output feedback control for networked control system with data mission. [J]. Information and control, 2007, 36 (3): 286-301.
8. Min Wu, Yong He, Jinhua She, et al. Delay-dependent criteria for robust stability of time-varying delay systems [J]. Automatic, 2004, 40 (8): 1435-1439.
9. Min Wu, Yong He, Jinhua She. New delay-dependent stability criteria and stabilizing method of neutral systems [J]. IEEE Transactions on automatic control, 2004, 49 (12): 2266-2271.
10. Xianming Zhang, Min Wu, Jinhua She, et al. Delay-dependent stabilization of linear systems with time-varying state and input delays [J]. Automatica, 2005, 41 (8): 1405-1412.
11. Yafeng Guo, Shaoyuan Li. H-infinity state-back controller design for networked control systems. [J]. Control theory and applications, 2008, 25 (3): 414-420.
12. Yu Li. Robust control —linear matrix inequalities approach. Tsinghua University Press. 2002, 12. 13. Xiaoming Yu. Study on control strategy for networked control systems [D]. Hangzhou: Zhejiang