2016 International Congress on Computation Algorithms in Engineering (ICCAE 2016) ISBN: 978-1-60595-386-1
1 INTRODUCTION
Artificial spacecraft systems running on spatial orbit can be called by a joint name as “on-orbit system” or “spatial system”, including on-orbit satellites, airship, aerospace plane, space station, space probe, space telescope, etc. [1]. When the fuel carried by on-orbit system runs out, or malfunction or aging failure occurs in power unit, the service life of on-orbit system will end [2]. In order to prolong service life of on-orbit spacecraft, reduce the system cost, improve the flexi-bility of spacecraft in fulfilling multiple spatial tasks and develop the on-orbit servicing technology, multi-ple operations for on-orbit spacecraft, such as on-orbit maintenance, module replacement, fuel adding and orbital transfer, have become the hotspots for the re-search on aerospace industry in recent years [3,4].
Due to the orbital features of geostationary orbital satellite (GEO satellite), GEO satellite plays a critical role in civilian and military fields, including meteor-ology, navigation, communication and forewarning. However, once a GEO satellite malfunctions or gets destroyed, not only massive economic loss will occur, but also will the satellite fail to break away from GEO orbit by self, and thus may occupy precious GEO orbital resources and seriously impact the safety of other GEO satellites. In order to recover the loss
caused by GEO satellite malfunction as much as pos-sible and effectively protect GEO orbital resources, each nation is developing on-orbital servicing tech-nology aiming at maintaining and supplying orbit, prolonging orbit lifespan, and cleaning orbital rubbish [5]
.
This paper took several GEO satellites as the on-orbit service targets and planned the sequence of multiple tasks which one service satellite fulfills on GEO orbit. This paper comprehensively analyzed key indexes such as the fuel consumption and time cost of service satellite, established the mathematical model of on-orbit planning problem and proposed an im-proved genetic algorithm to search the optimal orbital transfer service strategy for service satellite.
2 PROBLEM DESCRIPTIONS
2.1 Optimization problem of orbital transfer sequence
When a service satellite on GEO needs to fulfill on-orbit operation task for several target satellites scattered on different fixed point positions on GEO, the service satellite can drift by orbit ascending and descending if the priorities of all the tasks are the
Research on the Optimization of Orbital Transfer Strategy Based
on Improved Genetic Algorithm for On-Orbit Service Satellite
Yuanhui Song
China Satellite Maritime Tracking and Control Department, Jiangyin, Jiangsu, China
ABSTRACT: On-orbit service technology aiming at maintaining and supplying orbit, prolonging orbit lifespan and cleaning orbital rubbish has great significance on reducing the cost of geostationary orbit satellite and mak-ing full use of stationary orbit resources. In order to solve the sequential plannmak-ing problem of service satellite providing service for several target satellites, this paper proposed an optimal orbital transfer strategy of searching service satellite based on an improved genetic algorithm. It analyzed the orbital transfer process of service satel-lite, designed the individual coding mode and proposed an optimal operator to improve genetic nature. The sim-ulation results showed that optimal orbital transfer strategy can be found according to the algorithm proposed in this paper. The strategy reduced much consumption in energy and time while the algorithm was fast in conver-gence and high in stability.
same. Positions of fixed points are changed according to the near-far sequence of target satellite positions, so as to complete the close-range on-orbit operation of each target satellite. Nevertheless, due to the impact from perturbation of the earth, the sun and the moon, the orbit inclination of the target satellites cannot stay at 0° and the average rate of change is 0.85°/year. Therefore, certain orbital inclination exists on each on-orbit target satellite. As a result, both fixed point position and orbital inclination of the service satellite need to be changed.
Change of fixed point position requires less fuel but longer time; on the contrary, change of orbital inclina-tion requires more fuel but shorter time. Consequently, for target satellites with different fixed point positions and orbital inclinations, the service satellite shall not only complete orbital transfer according to the near-far sequence of fixed point position or the size order of orbital inclination, but shall also comprehensively consider fuel consumption and required time, so as to find the optimal orbital transfer sequence.
2.2 Description of orbital transfer process
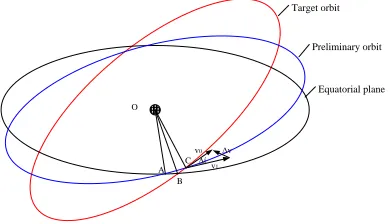
Assume the orbital parameters of the preliminary orbit and the target orbit are (λ0,і0,Ω0)and (λ1,і1,Ω1) respec-tively, among which λ refers to position of satellite fixed point, i refers to orbital inclination, and Ω refers to right ascension of ascending node. Then, the orbital transfer process from the preliminary orbit to the tar-get orbit can be expressed as follows:
(1) Orbital transfer inclination
The sketch map of orbital transfer to change orbital inclination is shown as follows. Point A refers to the ascending node of the preliminary orbit while Point B refers to the ascending node of the target orbit. When the satellite arrives at Point C which is the intersection point of the two orbits, the orbital inclination can be changed through velocity increment ∆v1.
A B
C O
v0
v1
∆v ∆ί
[image:2.516.57.252.474.586.2]Equatorial plane Preliminary orbit Target orbit
Figure 1. Sketch map of orbital transfer.
Calculation formula for velocity increment ∆v1 is given below:
2 2
1 01 0 20 1cos
v v v v v i
(1)
Among which,
0 1 0 1 1 0
cos i cos cosi i sin sin cos(i i ). After orbital transfer is completed, the position of satellite fixed point is
01
and its calculation formula is given below:
01 0 1 0 1 0
Among which,
0and
1 respectively refer to AOC and BOC with calculation formulas shown as follows:
0 1 1 0
sin
sin sin(i ) sini,1 0 1 0
sin
sin sin(i ) sini(2) Position of fixed point
After the satellite accomplishes orbital transfer and arrives at the target orbit, drifting velocity can be ob-tained by ascending or descending orbital altitude, so as to change the position of fixed point. Velocity in-crement ∆v2 required in changing position of fixed point is given below:
2 2 GEO ( GEO )
v R R H
(2)
Among which, refers to gravitational coeffi-cient of the earth; RGEO refers to the orbital radius of GEO; H refers to the ascended or descended or-bital altitude.
The time required in changing position of fixed point is shown below:
3 3
1 01 GEO ( GEO )
t R R H
(3)
3 ALGORITHM DESIGN
Genetic algorithm is an optimal algorithm simulating the evolutionary process of the natural world. It ap-plies coding technique to assume the targets as indi-vidual chromosomes in the natural world. By operat-ing the population consisted of the individuals through design of corresponding genetic operators, genetic algorithm can simulate the evolutionary process of biotic population [6]. Genetic algorithm was taken in this paper to obtain the optimal solution for the orbital transfer problem of service satellite.
3.1 Individual coding mode
number of target satellites is 5, then the serial numbers shall be (1, 2, 3, 4, 5), meaning the individual code sequence of one orbital transfer strategy can be (4, 3, 1, 5, 2) with the implication that the service satellite will transfer the orbit to the surrounding of No.4, No.3, No.1, No.5 and No.2 target satellites in order and pro-vide on-orbit service.
3.2 Initialization of population
Set population size as n which means the number of individuals is n. Mark each individual as Dj, j=1, 2… n. Assume the number of target satellites is s and their serial numbers are (1, …, j, …, s), then the generation process of the initial individual Dj is as follows: ran-domly generate an array Rj: (rj1, …, rji, …, rjs) which is a group (with s individuals) within interval of (0, 1). Make ascending sort to this random group by size and mark the individuals with serial numbers starting from 1; then replace each random number in array Rj with the corresponding serial number to obtain the individ-ual serial number Nj: (nj1,…,nji,…,njs) corresponding to the array. In Nj: (nj1,…,nji,…,njs) , nji refers to the serial number of random individual rji in array Rj. In the algorithm designed in this paper, array Rj and seri-al number Nj coexist. While operating genetic opera-tors such as crossover operator and mutation operator, array Rj can be directly processed. While calculating individual fitness, array Rj shall be converted into individual serial number Nj representing orbital trans-fer sequence before related calculation is started.
3.3 Fitness function
Fitness function is one of the key factors in the con-vergence and stability of genetic algorithm, and has significant impact on the final optimization result. When the service satellite receives ground command to provide on-orbit service for several target satellites, whether it can complete on-orbit service within the shortest possible time is a key indicator in manifesting the task fulfillment ability of the service satellite [7]. Meanwhile, as the fuel that the service satellite can carry is limited, its mobile ability for orbital transfer shall also be considered. Therefore, this paper com-prehensively considered energy and time to obtain the optimal design for fitness function as shown below:
1 1 2 2
1
( ) ( ) 3600
s
j i i i
i
f D w v v w t
(4)Among which, vi1,
2
i v
and ti refer to the velocity increment and time required in the orbital transfer to No.i target satellite and can be respectively calculated by Formula (1), Formula (2) and Formula (3).
1
w
and2
w
respectively refer to the weights of energy consumption and time consumption, and can meet the requirement of1 2 1
ww .
It can be seen from Formula (4) that the fitness val-ues of individuals became bigger while the velocity increment became less; the fitness values of individu-als became bigger while time became shorter. Thus, the bigger fitness value is, the more optimal the strat-egy of individual is.
3.4 Genetic operator
Genetic operators include selection operator, crosso-ver operator and mutation operator [8–10]. In order to improve algorithm convergence and global optimum of solution, this paper also proposed optimal main-taining operator. Designs for these four operators will be given below.
(1) Selection operator
A new population shall be formed by selecting the superior individuals according to selection operator from the original population, in order to make the individuals of the population closer to the optimal solution. Selection operator is commonly used in rou-lette algorithm and the detailed operation mode is as follows: first, calculate the relative fitness value
j
F
of individual Dj according to the calculation formu-la below:
1
n j j j
j
F f f
Among which,
j
f refers to the fitness value of
j
D . And then, a random number
j
is generated and
0,1j
. If the random number can satisfy:
1
1 1
j j
k j k
k k
F F
Then this individual can be selected; or it shall be abandoned. The population can be obtained by n times of selection according to the process described above. In accordance with the mode given above, the big-ger the fitness value of individual is, the higher the probability of being selected is. In this case, the prob-ability that the genetic structure of the individual can be inherited to the next generation is higher. This se-lection mode can offer probability of being selected to each individual in the population, and thus can guar-antee the heredity of smaller individuals.
(2) Crossover operator
Crossover refers to select part individuals from the population according to crossover probability. In this mode, a new population can consist of the new viduals formed by exchanging part genes of the indi-viduals. Two-point crossover operator can be taken as the crossover operator and the detailed operation mode is as follows: set the crossover probability as
b
within interval of
0,1 . If ejPb, this individualshall be selected. To-be-crossed individuals can be selected according to the mode mentioned above. Then, select two random nodes in the individuals. New individuals can be formed by exchanging the data between the nodes of two to-be-crossed individu-als. Replace original individuals with new individuals so as to consist new individuals.
(3) Mutation operator
The simulation target of mutation operator is the gene mutation phenomenon during biological evolu-tion. The detailed operation mode is as follows: set the mutation probability as
c
P, then the number of muta-tion nodes is
c
nsP . Select part nodes of some indi-viduals according to generated random numbers, and use the random values within
0,1 to replace the original values on the nodes. Mutation operator can maintain population diversity and thus is beneficial to prevent the occurrence of prematurity phenomenon.(4) Optimal maintaining operator
After the operation of the above three operators, the population will convert from the original parent to better filial generation. However, it is still impossible to guarantee that all the optimal individuals in the parent population can be inherited into the filial popu-lation. As a result, the convergence velocity to obtain the optimal solution will be reduced. It may even oc-cur that the optimal solution obtained at last is just part optimum instead of global optimum. Therefore, this paper proposed optimal maintaining operator which contains the idea of “maintaining optimal indi-viduals”. The basic idea is to completely maintain part individuals that have the maximum fitness values in the parent population in the filial population. The de-tailed operation mode is as follows: make descending sort to all the individuals in the parent population and the filial population according to fitness. If optimal maintaining probability is Pa (around 2%–5%), then the individuals of which fitness values rank the top
nPa in the parent population shall entirely replace the individuals of which fitness values rank the last
nPa in the filial population, so as to form a filial generation with better performance.
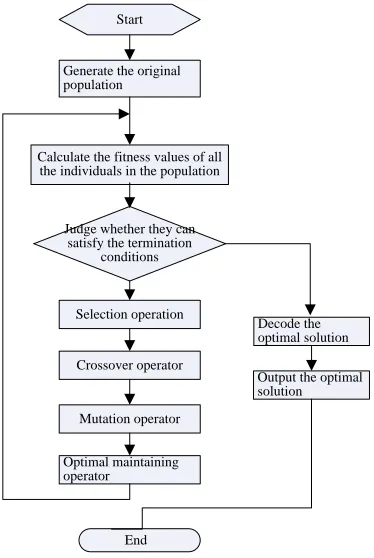
. refers to take the whole.3.5 Algorithm flow
The design steps of the algorithm proposed in this paper are given below:
(1) Generate the initialization population.
(2) Calculate the fitness values of all the individuals in the filial population according to the designed fit-ness function.
(3) Judge whether the fitness values can meet ter-mination conditions; move to Step (4) if not and move
to Step (5) if yes.
(4) Generate the next population through the pro-cess of selection operator, crossover operator, muta-tion operator and optimal maintaining operator ac-cording to crossover probability and mutation proba-bility, and then return to Step (3).
(5) Select the optimal individuals from the last filial population, output corresponding optimal solution and end the algorithm.
Start
Generate the original population
Calculate the fitness values of all the individuals in the population
Optimal maintaining operator
Mutation operator Crossover operator Selection operation
Output the optimal solution Decode the optimal solution Judge whether they can
satisfy the termination conditions
[image:4.516.271.458.157.436.2]End
Figure 2. Algorithm flow chart.
4 SIMULATION ANALYSES
In order to verify the correctness and effectiveness of the algorithm, this paper applied MATLAB software to conduct simulation for the algorithm proposed here. The 9 target satellites which service satellite provides on-orbit service for were taken as examples. The or-bital altitudes of the service satellite and the target satellites were stationary orbits. See the table given below for the orbital parameters.
Table 2 shows the strategy for the initial population and the optimal strategy obtained through 1,000 times of iteration with the situation of energy consumption and time consumption. The followings can be ob-tained from the data given in the table that both energy consumption and time consumption were large due to the random offering of the initial strategies; the solved strategy greatly reduced energy consumption and time consumption through the algorithm optimization pro-vided in this paper. It can thus be seen that the opti-mization algorithm proposed in this paper is effective. Figure shows the maximum fitness of population and the changing process of average fitness during itera-tion. It can be seen from Figure 3 that the optimal strategy was found in the 60th generation, reflecting the algorithm proposed in this paper is fast in conver-gence and high in stability.
In order to further explain the effectiveness of the optimal maintaining operator proposed in this paper, the simulation results of the situation when no optimal maintaining operator was used are shown below and the other simulation conditions share no difference from those mentioned above. It can be seen from Fig-ure 4 that both the average fitness and the maximum fitness of population were lower when no optimal maintaining operator was used. The largest individual of each population generation was in continuous change. Moreover, the performance of the optimal strategy obtained from the last generation was even lower than that of the strategies generated from
previ-ous generations. Optimization performance was sig-nificantly lowered. It can thus be seen that the optimal maintaining operator proposed in this paper can im-prove the optimal searching ability of genetic algo-rithm and enhance algoalgo-rithm stability.
5 CONCLUSIONS
[image:5.516.52.465.67.212.2]This paper studied spatial on-orbit-servicing task with the background that one service satellite on the geo-stationary orbit needs to provide on-orbit service for several target satellites. It took both energy consump-tion of satellite and time consumpconsump-tion into considera-tion, designed optimal maintaining operator based on commonly used genetic operator and proposed a ge-netic algorithm with optimal maintaining ability that is applicable to searching optimal orbital transfer strate-gy for service satellite. The simulation results showed that the optimal maintaining operator guaranteed the optimal individuals emerged in each generation of population; the algorithm was fast in convergence and high in stability and the searching of optimal orbital transfer strategy which is based on the algorithm and proposed in this paper greatly reduced energy con-sumption and time concon-sumption. Based on the algo-rithm provided in this paper, research on the situation in which several service satellites provide service for several on-orbit target satellites can be conducted in the future.
Table 1. Orbital parameters of service satellite and target satellites.
No. Orbit inclination (°) Right ascension of ascending node (°) Location of fixed point (°)
Service satellite —— 0 0 50
1 0.03 10 60.01
2 2.54 20 −130.05
3 0.04 30 −12.15
4 4.59 40 56.77
5 1.41 50 103.84
6 0.35 60 3.94
7 5.1 70 −27.95
8 4.5 80 −67.90
9 7.33 90 −23.51
[image:5.516.52.467.262.340.2]Note: The “+” and “−” shown in location of fixed point from the above table respectively represent the fixed point was on east longitude and was on west longitude.
Table 2. Comparison of initial strategy and optimal strategy.
Orbital transfer service sequence Energy consumption (m/s) Time consumption (day) Fitness value
Initial strategy 1 (6,7,5,3,4,2,8,1,9) 1898.1 325.7 0.0308
Initial strategy 2 (8,3,2,4,7,1,6,5,9) 1698.0 326.4 0.0313
Initial strategy 3 (9,1,3,8,6,2,5,4,7) 1894.4 289.8 0.0412
REFERENCES
[1] Li, Y. & Dang, C.P. 2012. Technical progress of spatial on-orbit service. Ordnance Industry Automation, 31(5): 79-86.
[2] Sun, F.C., Wu, F.G. & Liu, H.P. 2008. Research and outlook on the technology of on-orbit-servicing tele-operation. Technology and Application of Space Control, 34(1): 33-37.
[3] Tan, C.L., Liu, Y.J. & Yu, D.Y. 2008. Research on on-orbit maintenance and service system. Spacecraft Engineering, 17(3): 45-50.
[4] Cui, N.G., Wang, P. & Guo, J.F. 2007. Summarization of space on-orbit service technology development.
Journal of Astronautics, 28(4): 33-39.
[5] Liang, B., Xu, W.F., Li, C. & Liu, Y. 2010. Current con-ditions and developing tendency of on-orbit service technology research of earth stationary orbit. Journal of Astronautics, 31(1): 1-13.
[6] Wu Angus, Tsang P. W. M., Yuen T. Y. F. & Yeung L.F. Affine. 2009. Invariant object shape matching using genetic algorithm with multi-parent orthogonal recom-bination and migrant principle. Applied Soft Computing Journal, 9(1): 282-289.
[7] Liu, S. 2006. Applied Research on Improved Parallel Genetic Algorithm. Master Dissertation from Dalian Jiaotong University.
[8] Vikrant Aute & Shapour Azarm. 2006. A genetic algo-rithms based approach for multidissciplinary multiobjec-tive collaboramultiobjec-tive optimization. AIAA 2006-6953, 2006. USA: AIAA.
[9] Jian Li, Fuhua Ma & Vigor Yang. 2006. Control and op-timization of ignition transient in scramjet engine using air throttling. AIAA 2006-1028, 2006. USA: AIAA. [10] Ajith Narayananm & Vassili V Toropov. 2006.