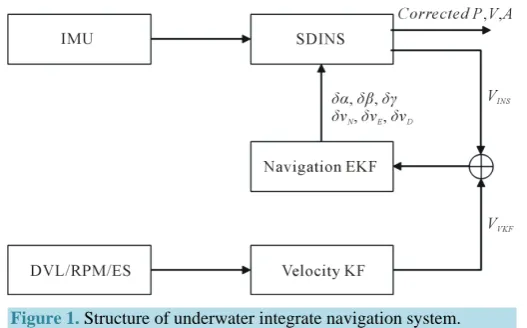
DVL/RPM Based Velocity Filter Aiding in the Underwater Vehicle Integrated Inertial Navigation System
Full text
Figure

Related documents
Other campaign particularities shared include gradual processes of tailoring resources to campaigning such as funding and staff; a predominant but changing
In incremental distance mode: when the XY-plane is selected, X, Y, and R numbers are treated as increments to the current position and Z as an increment from the Z-axis position
It is interesting to discover that prior the millennial age, the overall perceived level of travel satisfaction are mainly attributed by the travel and tourism related key
The study finds out that due to the achievement of peace and development for the country, the government implements Arabic Language and Islamic Values Program
Penelitian ini dilaksanakan pada bulan Februari 2017 yang berlokasi di Pulau Buluh Kelurahan Pulau Buluh Kecamatan Bulang Kota Batam Provinsi Kepulauan Riau. Penelitian
The legend breaks were manually created to allow a more detailed analysis in the lower water table elevations (-70 through 100 feet), and less detail in the upper elevation
Faculty Representative, University of Illinois, College of Commerce and Business Administration the National Black MBA Association Annual Conference, panelist and UIUC case
Executing all steps of the object thinning requires ve custom image processing instructions ( LOWPASS , CLEAR , HISTOGRAM , THRESHOLD , and SKELETON ) and. the three
