DETEKSI KECEPATAN KENDARAAN DENGAN METODE BACKGROUND SUBSTRACTION
(Skripsi)
Oleh
AGUNG KURNIA
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
ABSTRAK
VEHICLE SPEED DETECTION WITH METHOD BACKGROUND SUBTRACTION
BY
AGUNG KURNIA
The high number of road accidents is caused by many motorists driving at high speeds. To reduce the number of accidents, we need a system that not only can detect vehicles but also can provide vehicle speed information. With the advancement in technology, computer assistance to detect vehicle speeds has become easier with image processing. In this study, the method used is the Background Subtraction method. Methods that can be used to process moving images in order to know the existence of objects in the video, after the object is detected the system will estimate the speed of the object, then images that have vehicle speed information will be stored in memory. In the functional testing of the system, there are several vehicle speed conditions, from 20 Km/hr to 60 Km/hr, based on the speedometer and information read by the system, there is the highest error of 5% and the lowest is 1% to obtain an accuracy value of 95%.
ABSTRAK
DETEKSI KECEPATAN KENDARAAN DENGAN METODE BACKGROUND SUBSTRACTION
Oleh
AGUNG KURNIA
Tingginya angka kecelakaan di jalan raya diakibatkan banyak pengendara yang mengendarai dengan kecepatan tinggi. Untuk mengurangi angka kecelakaan tersebut maka, diperlukan sebuah sistem yang tidak hanya dapat mendeteksi kendaraan tapi juga dapat memberikan informasi kecepatan kendaraan. Dengan kemajuan teknologi, bantuan komputer untuk mendeteksi kecepatan kendaraan semakin mudah dengan adanya pengolahan citra. Pada penelitian ini metode yang digunakan yaitu metode Background Substraction. Metode yang dapat dimanfaatkan untuk memproses citra bergerak agar mengetahui adanya objek pada video, setelah objek terdeketsi sistem akan mengestimasi kecepatan dari objek tersebut, selanjutnya citra yang memiliki informasi kecepatan kendaraan akan tersimpan pada memori. Pada pengujian fungsional sistem terdapat beberapa kondisi kecepatan kendaraan yaitu dari 20 Km/jam hingga 60 Km/jam, berdasarkan speedometer dan informasi yang terbaca oleh sistem, terdapat error tertingi yaitu 5% dan dan terendah yaitu 1% sehingga didapat nilai akurasi sebesar 95%.
DETEKSI KECEPETAN KENDARAAN DENGAN METODE BACKGROUND SUBSTRACTION
Oleh
AGUNG KURNIA 1515031023
Skripsi
Sebagai salah satu syarat untuk mencapai gelar SARJANA TEKNIK
Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
Iudul $laipsi
NarnaMdrasiswa
Nomsr Pskok Mahasiswa
Irrtrsan
Fekul&s
Sy*iful
Alrmj
NIp. 1969S416I}ETSI($I KECEPAIAN I(ENDANAAN MSNGGtrINAKANMETODE
SACKCROUIiil} SIIBSTRACTION Agung Kusda
r5r5031023
TeknikHlelcuo
: Teknik
. 19710314199S32001
l.
T{ENGISAHKAN
Tim P€ngrji
Kenra
$ekrctaris
Peneuji
Buh
: Syaffnl Atrm, S.?., M.?,
,hf,
Suhrrno, M,Sc.i Ph,D* NrP r96207r7r987[3tm2Tanggal Lulus Ujiun Slaipsi: 16 J*nunrt 2020
s.T., M.?.
,'T
:uminrlT*
*\
Teknik
-
J- '--\
STIRAT PERIITYATAAF{
Dengan ini saya menyatakan bahwa dalam skripsi ini tidak ada terdapal yang
pernsh dilakukan o{ang lain dan sepanjang sepengefahuan mya tidak terdapal
karya abu pendapat yang ditulis ata$ Citerbitkan orang lain, kecuali tertulis
diacu dalam naskah ini sebagaimana yang disebutkan di dalam daftar Selain itu, saya menyntakan pula bahwa skripsi ini dibuat oleh saya sendiri
Apabila pernyataan saya tidak benar, maka saya bersedia dikenakan
hukum yaug
Penulis dilahirkan di Tegineneng, Pesawaran, Provinsi Lampung pada tanggal 17 Mei 1997. Penulis merupakan anak pertama dari tiga bersaudara dari pasangan Bapak Zak ari a dan Ibu Siti Zulaiha yang diberi nama Agung Kurnia.
Mengenai riwayat pendidikan, penulis lulus Sekolah Dasar di SDN 1 Banjar Negeri pada tahun 2009, lulus Sekolah Menengah Pertama di SMP N 1 Natar pada tahun 2012, lulus Sekolah Menengah Atas di SMA N 1 N a t a r pada tahun 2015, dan diterima di Jurusan Teknik Elektro Universitas Lampung pada tahun 2015 melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN).
PERSEMBAHAN
Bismillaahirrahmaanirrahiim
Kuucapkan puji syukur kepada Allah SWT atas segala rahmat dan hidayah-Nya serta shalawatku kepada Nabi Muhammad
SAW yang telah menjadi pedoman hidupku
Kupersembahkan karyaku ini kepada Abi Zakaria dan Mami Siti Zulaiha sebagai wujud bakti, cinta, kasih sayang dan terimakasihku atas segala yang telah diberikan, untuk adik-adikku Ahmad Wahyu dan Dinar Pratiwi atas dukungan, doa
dan kasih sayang yang telah diberikan.
Lembaga yang telah mendidik, mendewasakan, dan mencerdaskanku
dalam berpikir dan bertindak
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung
Dan untuk
"Barang siapa yang bersungguh sungguh, sesungguhnya kesungguhan tersebut
untuk kebaikan dirinya sendiri"
(QS. Al-Ankabut: 6)
“Sesungguhnya sesudah kesulitan itu ada kemudahan, sesungguhnya sesudah
kesulitan itu ada kemudahan.”
(Qs. Asy Syarh: 5-6)
“Allah tidak membebani seseorang itu melaikan sesuai dengan kesanggupannya”
(QS. Al-Baqarah: 286)
“Maka nikmat Tuhan-mu yang manakan yang kamu dustakan”
(Qs. Ar-Rahman: 13)
“Tidaklah seseorang menempuh jalan dalam rangka mencari ilmu, kecuali Allah
akan mempermudah jalan baginya menuju ke surga”
(HR. Abu Daud)
“Balas kebaikan seseorang dua kali lipat dari apa yang mereka beri, maka tuhanmu
SANWACANA
Bismillaahirrahmaanirrahiim
Allhamdulillah puji syukur penulis ucapkan atas kehadirat Allah SWT atas segala karunia, hidayah, serta nikmat yang diberikan sehingga penulis dapat menyelesaikan skripsi ini yang berjudul ―Deteksi Kecepatan Kendaraan Dengan Metode Background Substraction ― yang merupakan salah satu syarat untuk memperoleh gelar Sarjana Teknik di Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung.
Selama menjalani pengerjaan Skripsi ini, penulis mendapatkan bantuan pemikiran maupun dorongan moril dari berbagai pihak. Oleh karena itu dalam kesempatan kali ini, penulis ingin mengucapkan terima kasih kepada:
1. Pak Khairudin, S.T., M.Sc., Ph. D. Eng selaku Ketua Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung
2. Ibu Herlinawati, S.T., M.T. selaku Sekertaris Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung dan juga Dosen Pembimbing Pendamping, terima kasih atas kesediaan waktunya untuk membimbing dan memberikan ilmu.
4. Bapak Syaiful Alam S.T., M.T., selaku Pembimbing Utama tugas akhir saya terima kasih atas masukan, bimbingan, arahan dalam pengerjaan Tugas Akhir ini.
5. Ibu Umi Murdika S.T., M.T. selaku Penguji Utama, terima kasih atas masukannya guna membuat skripsi ini menjadi lebih baik lagi.
7. Bapak dan Ibu Dosen Jurusan Teknik Elektro, terima kasih atas didikannya, arahan dan bimbingan yang telah diberikan.
8. Mbak Ning dan jajaran staf administrasi Jurusan Teknik Elektro Universitas Lampung.
9. Orang Tua yang sangat saya sayangi, adik-adik yang sangat saya banggakan serta semua keluarga yang telah mendukung penuh sehingga saya dapat menyelesaikan laporan tugas akhir ini.
10. Nadia Muthiati yang telah mendukung saya secara pribadi sehingga saya dapat mengerjakan tugas akhir dengan semangat.
11. Seluruh Keluarga EIE 2015 atas waktu, senang dan sedih saat pengkaderan yang telah dirasakan bersama-sama selama perkuliahan ini.
Semoga Allah SWT membalas kebaikan semua pihak yang telah membantu dalam penyelesaian Skripsi ini.
Bandar Lampung, 16 Januari 2019 Penulis,
DAFTAR ISI
Halaman
ABSTRAK ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... viii
I. PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan Penelitian ... 3
1.3 Manfaat Penelitian ... 3
1.4 Rumusan Masalah ... 3
1.5 Batasan Masalah ... 4
1.6 Hipotesis ... 4
1.7 Sistematika Penulisan ... 4
II. TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu……….……....6
2.2 Citra……….…….7
2.3 Pengolahan Citra ... 7
2.4 Background Substraction ... 9
2.4.1 Pre-processing……….…………10
2.4.2 Grayscale……….……….10
2.4.4 Foreground detection………….………..……….………11
2.4.5 Thresholding……….………...12
2.4.6 Perhitungan kecepatan………..…..13
2.5 Cascade Classifier……….. 15
2.6 Python ... 16
III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian... 18
3.2 Alat dan Bahan ... .18
3.3 Prosedur Penelitian ... .18
3.3.1 Blok Diagram Sistem Keseluruhan ... 19
3.3.2 Metode yang Digunakan ... 20
3.3.3 Diagram Alir Metode yang Digunakan ... 21
IV HASIL DAN PEMBAHASAN 4.1 Hasil dan Analisa………. ………. 23
4.1.1 Background Substraction………..23
4.2 Perancangan Deteksi Kendaraan dan Perhitungan Kecepatan …36 4.2.1 Perancangan Deteksi Kendaraan dan Perhitungan……….37
4.3 Hasil Pengujian Keseluruhan Sistem………..41
V SIMPULAN DAN SARAN 5.1. Simpulan………48
5.2. Saran………..49
DAFTAR GAMBAR
Gambar Halaman
2.1. Contoh Background Substraction ... 9
2.2. Jarak antara 2 titik……….13
2.3 Tata Letak Pengambilan Video oleh Kamera…………..……….14
2.4 Persegi Cascade Pada Citra masukan………16
3.1. Diagram Alir Prosedur Penelitian ... 19
3.2. Blok Diagram Sistem Keseluruhan ... 19
3.3. Diagram Alir Metode yang Diusulkan ... 21
4.1. Citra asli background……….25
4.2. Citra grayscale pada background..……….. 28
4.3. Citra background menjadi biner ……….……… 29
4.4. Citra asli (a) Citra biner (b)..……… 33
4.5. Pengurangan citra terkini dengan background (a) Citra terkini (b) Citra biner……….……….. 34
4.6. Hasil citra foreground ……….………. 36
DAFTAR TABEL
Tabel Halaman
4.1 Hasil percobaan dengan kecepatan 20 Km/Jam……….28
4.2 Hasil percobaan dengan kecepaan 30 Km/Jam………..29
4.3 Hasil percobaan dengn kecepatan 40 Km/Jam………...30
4.4 Hasil percobaan dengan kecepatan 50 Km/Jam……….31
4.5 Hasil percoban dengan kecepatan 60 Km/Jam………...32
I. PENDAHULUAN
1.1 Latar Belakang
Aplikasi ilmu Teknik Elektro pada era ini semakin berkembang, salah satunya pada bidang pengolahan citra digital. Kemajuan ilmu teknologi pengolahan citra digital yang semakin pesat diharapkan dapat mempermudah kehidupan manusia dalam berbagai bidang ilmu, antara lain bidang kedokteran, militer, maupun rumah tangga. Teknologi pengolahan citra ini dapat membantu manusia dalam hal otomasi dengan mengaplikasikannya pada mikrokontroler.
2
lebih baik dari citra masukkannya atau memiliki informasi yang diinginkan. Manfaat dari pengolahan citra dapat diimplementasikan untuk mengidentifikasi objek, menghilangkan cacat pada citra, penggabungan antara citra satu dengan citra lainnya dan lain-lain.
Penelitian ini mengusulkan metode background substraction berdasarkan kecepatan dari kendaraan menggunakan pengolahan citra untuk menentukan objek. Penelitian ini menggunakan software pendukung Python agar memudahkan dalam mengidentifikasi objek. Citra yang diperoleh diolah menggunakan operasi Tresholding (pengambangan) menentukan pengelompokan nilai piksel. Thresholding digunakan untuk mengatur jumlah derajat keabuan yang ada pada citra. Dengan menggunakan thresholding maka derajat keabuan bisa diubah sesuai keinginan
3
Image Processing denga cara merekam video lalu diproses menggunakan Simulink Matlab. Metode yang dipakai yaitu deteksi tepi, object tracking dan meteode Centroid.
.
1.2 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah sebagai berikut:
1. Untuk merealisasikan perhitungan kecepatan kendaraan menggunakan pengolahan citra.
2. Untuk mengidentifikasi objek kendaraan yang telah terdeteksi oleh sistem yang dibuat.
3. Menampilkan kecepatan pada objek kendaraan didalam citra.
1.3 Manfaat Penelitian
Manfaat dari penelitian ini adalah:
1. Dapat mendeteksi kecepatan suatu kendaraan menggunakan pemrograman python.
2. Dapat menangkap gambar setelah kecepatan kendaraan terdeteksi oleh sistem . 3. Dapat mengaplikasikan pemrograman Python.
4. Menjadi bahan untuk dikembangkan dalam penelitian berikutnya.
1.4 Perumusan Masalah
Mengacu pada permasalahan yang ada, maka perumusan penelitan ini berfokus pada aspek berikut:
4
2. Bagaimana menangkap gambar dari video kendaraan yang memiliki informasi berupa kecepatan.
3. Bagaimana menentukan objek dari sistem pendeteksi kecepatan kendaraan dengan pengolahan citra?
1.5 Batasan Masalah
Dalam penelitian ini terdapat beberapa batasan masalah, yaitu: 1. Membahas tentang pendeteksian kecepatan kendaraan.
2. Menggunakan metode yaitu metode Background Substraction. 3. Menentukan satu kecepatan kendaraan dalam pengambilan data.
1.6 Hipotesis
Sistem yang dirancang dapat mendeteksi suatu kecepatan kendaraan dijalan dengan menggunakan kamera handphone untuk mengambil video yang akan diolah sebagai input. Penggunaan pengolahan citra dapat membantu pemisahan background dengan foreground yang akan ditangkap oleh kamera dalam video, metode ini disebut dengan background substraction. Selanjutnya setelah objek terdeteksi akan dilakukan proses penghitungan kecepatan kendaraan.
1.7 Sistematika Penulisan
5
BAB I. PENDAHULUAN
Memuat latar belakang, tujuan, manfaat, perumusan masalah, batasan masalah, hipotesis, dan sistematika penulisan.
BAB II. TINJAUAN PUSTAKA
Berisi tentang teori-teori yang mendukung sistem perancangan deteksi objek serta teori-teori tentang metode yang akan digunakan, yaitu pengolahan citra dengan bantuan metode Background Substraction.
BAB III. METODE PENELITIAN
Berisi rancangan sistem, yang meliputi alat dan bahan yang digunakan, langkah-langkah pengerjaan yang dilakukan, penentuan spesifikasi sistem, perancangan sistem, serta diagram alir sistem.
BAB IV. HASIL DAN PEMBAHASAN
Menjelaskan prosedur pengujian, hasil pengujian, dan analisa data.
BAB V. SIMPULAN DAN SARAN
Memuat simpulan yang diperoleh dari hasil pembuatan dan pengujian alat, dan saran-saran untuk pengembangan lebih lanjut.
II. TINJAUAN PUSTAKA
2.1. Penelitian Terdahulu
Penelitian sebelumnya oleh A. Wilson N. Teknik Elektro Universitas Lampung yaitu Perancangan Model Kamera Trap Pendeteksi Kecepatan Kendaraan Dengan Pengambilan Otomatis Berbasis Raspberry Pi 3. Pada penelitian ini menggunakan Raspberry Pi3 sebagai pengendali utama, sensor HB-100 sebagai piranti pembaca kecepatan kendaraan yang melintas, kamera webcam yang digunakan untuk mengambil gambar kendaraan dan flashdisk sebagai media penyimpanan gambar. Penelitian ini menunjukkan bahwa rancang bangun sistem dapat membaca kendaraan yang melintas dengan selisih pembacaan antara sensor HB-100 dengan speedometer sebesar 0,45 sampai 1,16 km/jam. Data yang disimpan berupa kecepatan kendaraan, tanggal, dan waktu kendaraan secara real time [1]. Perbedaan dengan penulis yaitu penulis menggunakan metode pengolahan citra dengan menggunakan bacground subtraction
7
2.2. Citra
Citra (image) adalah gambar pada bidang dwimarta (dua dimensi). Ditinjau dari sudut pandang kegunaannya, citra merupakan salah satu bentuk informasi yang diperlukan manusia selain teks, suara dan video. Informasi ini diperlukan bukan hanya untuk komunikasi antar manusia saja tetapi juga antara manusia dengan mesin. Informasi yang terkandung dalam sebuah citra dapat diinterpretasikan berbeda-beda oleh manusia satu dengan yang lain. Artinya, nilai informasi pada sebuah citra bersifat subjektif tergantung keperluan masing-masing manusia. Oleh karena itu diperlukan pengolahan citra untuk mendapatkan citra yang memiliki informasi yang dikehendaki [3]. Posisi terbaik untuk mengambil gambar dengan resolusi yang baik untuk objek adalah bahwa ketika objek berada di tengah-tengah frame, maka ketika objek tersebut berada di sekitar tengah frame maka sistem menyimpan frame saat ini sebagai objek yang diambil gambar [4].
2.3. Pengolahan Citra
8
menjadi berkurang Oleh karena itu, semakin majunya teknologi memperkenalkan kita dengan pengolahan citra [6].
Pengolahan citra merupakan proses memperbaiki kualitas citra dengan menggunakan bantuan komputer. Pengolahan citra memiliki beberapa proses sehingga menghasilkan keluaran berupa citra yang kualitasnya lebih baik dari sebelumnya.
1. Dalam melakukan proses, image processing terdapat 3 langkah dalam prosesnya yaitu: Input yang merupakan pengambilan suatu citra menggunakan alat pemindai optik yang hasilnya berupa citra digital.
2. Process, setelah proses Input maka data tersebut diproses menggunakan suatu teknik yang telah ditentukan.
3. Output, data yang telah diproses akan ditampilkan dengan cara tertentu. Output yang dihasilkan dapat berupa image atau data.
Umumnya, operasi-operasi pada pengolahan citra diterapkan pada citra bila: 1. Dalam meningkatkan kualitas citra atau untuk menonjolkan beberapa aspek
informasi yang terkandung dalam citra diperlukan perbaikan atau modifikasi pada citra tersebut.
2. Diperlukan pengelompokan, pencocokan, atau pengukuran elemen didalam citra.
9
2.4 Background Substraction
[image:25.595.183.443.394.637.2]Backrounnd Substraction yang juga dikenal sebagai ForegroundDetection adalah salah satu teknik pada bidang pengolahan citra yang bertujuan untuk mendeteksi/mengambil foreground dari background untuk diproses lebih lanjut (seperti pada proses object recognition, dll) dengan cara membandingkan gambar yang ada dengan model latar belakang [7]. Umumnya foreground yang diinginkan adalah berupa objek manusia, mobil, teks, dll. Backgroundsubtraction merupakan metode yang umumnya digunakan untuk mendeteksi objek bergerak pada video dari kamera statis (stationary camera). Proses deteksi objek bergerak dengan metode background subtraction didasarkan pada perbedaan antara background referensi dengan frame.
10
2.4.1 Pre-processing
Tahap pre-processing merupakan suatu proses pengambilan data mentah dari kamera (atau input lainnya) diproses agar menjadi bentuk yang mudah dipahami pada program lain (selanjutnya). Tahapan awal pada proses ini yaitu melakukan eliminasi objek kecil atau dengan peningkatan kualitas citra. Agar data yang didapat sesuai dengan yang diinginkan maka diperlukan perbaikan citra seperti resize image dan cropping image.
2.4.2 Grayscale
Proses awal yang banyak dilakukan dalam pengolahan citra adalah mengubah citra berwarna menjadi citra keabuan, hal ini digunakan untuk menyederhanakan model citra. Seperti telah dijelaskan di depan, citra berwarna terdiri dari 3 layer matrik yaitu R- layer, G-layer dan B-layer. Sehingga untukmelakukan proses-proses selanjutnya tetap diperhatikan tiga layer di atas. Bila setiap proses perhitungan dilakukan menggunakan tiga layer, berarti dilakukan tiga perhitungan yang sama. Sehingga konsep itu diubah dengan mengubah 3layer di atas menjadi 1 layer matrik gray-scale dan hasilnya adalah citra grayscale. Dalam citra ini tidak ada lagi warna, yang ada adalah derajat keabuan [12].
11
Y (x,y) = (0,299*R) + (0,587*G) + (0,114*B) dimana :
Y = derajat keabuan
R = nilai pixel channel Red G = nilai pixel channel Green B = nilai pixel channel Blue
2.4.3 Background modelling
Tahap ini bertujuan untuk membentuk model background yang konsisten, namun tetap dapat beradaptasi dengan perubahan lingkungan yang ada. Model harus dapat mentoleransi tingkat perubahan lingkungan, namun tetap sensitif dalam mendeteksi pergerakan dari objek yang relevan [15].
2.4.4 Foreground detection
Pada tahap ini, dilakukan proses ekstraksi foreground dari background. Secara sederhana hal ini dilakukan dengan persamaan
berikut :
………..……
(2.1)
R = hasil foreground I = citra saat ini
B = background model r = baris
12
Nilai R lalu dibandingkan dengan nilai threshold yang telah ditentukan, jika lebih besar dari nilai threshold maka piksel di I(r,c) dapat dianggap berbeda dengan pixel di B (r,c). Nilai threshold adalah semacam nilai untuk mentolerasi error yang mungkin terjadi, threshold sendiri dipakai untuk mengurangi error yang disebabkan noise pada gambar digital [14].
2.4.5 Thresholding
Thresholding merupakan konversi citra berwarna ke citra biner yang dilakukan dengan cara mengelompokkan nilai derajat keabuan setiap pixel kedalam 2 kelas, hitam dan putih. Pada citra hitam putih terdapat
256 level, artinya mempunyai skala ―0‖ sampai ―255‖ atau [0,255], dalam hal ini nilai intensitas 0 menyatakan hitam, dan nilai intensitas 255 menyatakan putih, dan nilai antara 0 sampai 255 menyatakan warna keabuan yang terletak antara hitam dan putih. Pada operasi pengambangan, nilai intensitas pixel dipetakan ke salah satu dari dua nilai, α atau α [6].
Rumus untuk menentukan nilai threshold bisa didapatkan dari persamaan sebagai berikut:
≥ T}
< T}
dimana:
13
f(x,y) = merupakan nilai matriks citra yang akan di-threshold. T = merupakan nilai threshold (0 – 255)
Hasil akhir yang didapatkan adalah perbandingan model latar belakang sebelumnya dengan citra terakhir. Selisih antara model latar belakang dengan frame berupa citra biner yang diharapkan bernilai kurang dari nilai threshold. Apabila selisih bernilai kurang dari threshold maka dianggap bernilai 0 (hitam) dan apabila melebihi nilai threshold maka dianggap bernilai 1 (putih). Selisih yang diharapkan adalah sebuah matrik yang nantinya digunakan untuk menghitung jumlah pixel.
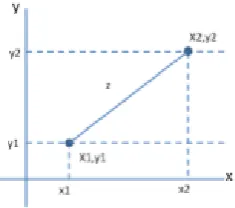
2.4.6 Perhitungan kecepatan
Jarak Antara 2 Titik Perhitungan jarak antara 2 titik dilakukan dengan menggunakan rumus phytagoras seperti pada dibawah ini
√
[image:29.595.263.381.606.710.2]dengan ( , ) merupakan koordinat titik pertama dan ( , ) merupakan koordinat titik ke dua. Jika digambar pada koordinat kartesian maka menjadi seperti pada gamba berikut:
14
D
Gambar 2.3 Tata Letak Pengambilan Video oleh Kamera
Persamaan untuk menghitung kecepatan kendaraannya yaitu:
Tc = 2 arctan (
(1)
T = Tv + (2)
Dimana, Tc adalah bidang sudut pandang kamera, v adalah vertikal dimensi dari 35 mm format gambar yang didapatkan dari spesifikasi handphone, f adalah focal length kamera yang digunakan. Setelah didapatkan nilai Tc dan T maka dapat dicari nilai D dan P dengan persamaan sebagai berikut,
D = H tan (T) (3)
P = 2 × D × tan (Tc) (4)
H
P
Tc
15
Dimana:
D = Jarak antara objek dengan kamera T = Keseluruhan sudut dari kamera
P = Jarak pandang tegak lurus dari kamera
K (koefisien kalibrasi) =
(6)
2.5Cascade Classifier
16
Gambar 2.4 Persegi Cascade Pada Citra masukan
Di dalam kotak inilah proses filtering obyek dilakukan untuk diketahui apakah ada atau tidak obyek yang akan dideteksi. Proses filterisasi ini dilakukan secara bertingkat yang menyebabkan metode ini nantinya disebut sebagai Cascade Classifier.
2.6 Python
Python adalah sebuah bahasa pemrograman yang bisa digunakan pada beberapa platform (multiplatform), dan bersifat sumber perangkat bebas terbuka (open source). Hal utama yang membedakan Python dengan bahasa lain adalah dalam hal aturan penulisan kode program. Python memiliki aturan yang berbeda dengan bahasa lain, seperti indentasi, tipe data, tuple, dan dictionary.
17
III. METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Penelitian dan pembuatan tugas akhir ini dimulai pada Maret 2019 hingga November 2019 bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung, Lampung.
3.2. Alat dan Bahan
Terdapat alat dan bahan yang diperlukan dalam melakukan penelitian ini adalah:
a. 1 unit handphone merk Xiaomi Note 5 Pro b. 1 unit laptop Acer E5-475G-3400
c. Perangkat lunak Python d. Teks editor Sublime text
3.3. Prosedur Penelitian
19
Gambar 3.1 Diagram Alir Prosedur Penelitian
[image:35.595.113.516.506.659.2]3.3.1 Blok Diagram Sistem Keseluruhan
Gambar 3.2 Blok Diagram Sistem Keseluruhan
Gambar 3.2 menunjukan blok diagram dari sistem keseluruhan yang dijalankan, dimulai dari pengambilan video menggunakan kamera handphone, selanjutnya
Pengambilan Video
Pengolahan Citra Awal (Penentuan
Objek)
Perhitungan Kecepatan Kendaraan
dari Objek yang Terdeteksi
Citra dengan Informasi Kecepatan
20
input berupa video tersebut diproses untuk mendeteksi objek bergerak, objek bergerak yang terdeteksi diproses untuk mendapatkan kecepatan kendaraan. Program menyimpan data berupa citra yang memiliki informasi kecepatan.
3.3.2 Metode yang Digunakan
21
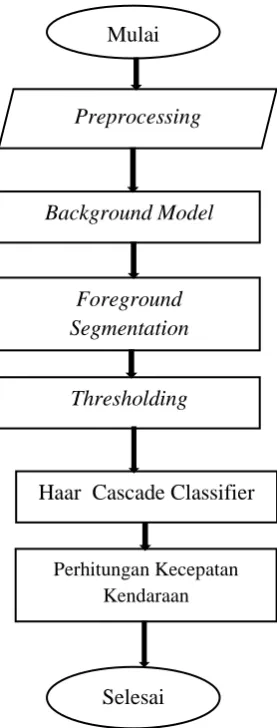
3.3.3. Diagram Alir Metode yang Digunakan
[image:37.595.242.381.189.554.2]Berikut merupakan diagram alir dari metode yang digunakan pada penelitian ini:
Gambar 3.3 Diagram Alir Metode yang Digunakan
Preprocessing adalah tahapan awal dari sistem yaitu data mentah yang didapat dari lapangan diproses pada perangkat lunak menjadi bentuk yang dapat dimengerti oleh bagian program lain. Background modelling bertujuan untuk membentuk model background yang konsisten, namun tetap dapat beradaptasi dengan lingkungan yang ada. Setelah background modelling lalu dilakukan
Mulai
Preprocessing
Foreground Segmentation Background Model
Thresholding
Selesai
22
V SIMPULAN DAN SARAN
5.1 Simpulan
Bersadarkan hasil penelitian yang telah dilakukan maka dapat diambil kesimpulan sebagai berikut:
1. Telah tercipta suatu sistem untuk mendeteksi dan mengetahui kecepatan kendaraan dengan memanfaatkan pengolahan citra.
2. Dari data hasil pengujian sistem setelah kecepatan ditampilkan maka citra dari kendaraan akan tertangkap dan tersimpan.
49
5.2 Saran
Dalam pembuatan sitem ini terdapat beberapa saran untuk penelitian yang akan mendatang yaitu:
1. Untuk penelitian selanjutnya program dapat dikembangkan untuk dapat mendeteksi kecepatan kendaraan secara real time.
2. Penggunaan Internet of things (IOT) untuk pengecekan Data Base secara online agar mempermudah mengidentifikasi kendaraan tersebut.
3 Untuk penelitian selanjutnya, pengujian sistem dapat dilakukan pada malam hari dengan penambahan sumber cahaya atau menggunakan teknologi kamera infra merah.
DAFTAR PUSTAKA
[1] Neutriansyah. A.W, 2018, Perancangan Model Kamera Trap Pendeteksi Kecepatan Kendaraan Dengan Pengambilang Otomatis Berbasis Raspberry Pi 3, Universitas Lampung, Lampung.
[2] Mangala. A.G, 2017. A Review on Vehicle Speed Detection Using Image Processing. N.M.A.M Institute of Technology. Nitte.
[3] Sulistiyanti, S.R., F.X. Arinto, M. Komarudin, 2016. Pengolahan Citra Dasar dan Contoh Penerapannya. Yogyakarta. Teknosain.
[4] Purvaja dan Kajal. 2017. An Image Processing Approach For Moving Vehicle Speed Detection by Speed Camera. IJECSCSE, ISSN: 2277-9477.
[5] Kusumaningtyas, dan Rosa Andrie. 2016. Identifikasi Kematangan Buah Berdasarkan Warna Menggunakan Metode Jaringan Syaraf Tiruan (JST). Vol 2 (ISSN: 2407-070X), 72.
[6] Munir, R. 2004. Pengolahan Citra Digital. Bandung.
[7] Eka dan Wiwien, 2013. Implementasi Metode Image Substracting dan Metode Regionprops Untuk Mendeteksi Jumlah Objek Berwarna Pada File Video. Universitat Stikubank. Dinamik, Vol 18 (2), 93-95.
[8] Wahyu, D.W. 2017. Speed Estimation on Moving Vehicle Based on Digital Image Processing. IJCSAM, Vol 3 (1), 21-24.
[9] Samudera, N.A. 2015. Perancangan Sistem Keamanan Ruangan Menggunakan Raspberry Pi. Universitas Telkom. e-Proceeding of Engineering, Vol 2 (2), 3822-3824.
[11] Santi, C.N. 2011. Mengubah Citra Berwarna Menjadi Grayscale dan Citra Biner. Jurnal Teknologi Informasi DINAMIK Volume 16 (2), 14-19.
[12] Eko Prasetyo. 2011. Pengolahan Citra Digital dan Aplikasinya menggunakan Matlab. Yogyakarta. Penerbit Andi.
[13] V i o l a , P a u l d a n M i c h a e l J o n e s . 2 0 0 1 . R a p i d O b j e c t D e t e c t i o n u s i n g B o o s t e d C a s c a d e o f S i m p l e F e a t u r e s. P r o c e e d i n g s I E E C o n f . O n C o m p u t e r V i s i o n a n d P a t t e r n R e c o g n i t i o n.
[ 1 4 ] Sito, 2013. Implementasi Metode Image Subtracting Untuk Mendeteksi Gerakkan Objek Dengan Warna Pada File Video. Fakultas Teknologi Informasi Universitas Stikubank. Semarang.
![Gambar 2.1 Contoh Background Substraction [7]](https://thumb-us.123doks.com/thumbv2/123dok_us/8796693.911997/25.595.183.443.394.637/gambar-contoh-background-substraction.webp)