25
Wi-Fi Surveillance Robot Using Raspberry Pi
Prof. I.Y.Sheikh
1, Harshal C. Chavan
2, Jaya S. Vyawhare
3, Sampada B. Mahajan
4, Rahul S. Raut
51
Assistant Professor, E&TC Department, Pankaj Laddhad Institute of Technology and Management Studies, Buldana (MS), India.
2,3,4,5
Final yearB.E. student, E&TC Department, Pankaj Laddhad Institute of Technology and Management Studies, Buldana (MS), India.
Email: [email protected]1, [email protected]2, [email protected], [email protected] , [email protected]
Abstract- The proposed robotic unit is used for video surveillance of remote place as well as remotely control of the unit using Wi-Fi as medium. Raspberry pi serve the purpose of server as well as the microprocessor for the system. An embedded web server creates an easy way for monitoring & controlling any device which is at remote place. Video is captured through the webcam placed on the robotic unit and lively transmitted to the remote end. Controls are provided on the console page where one can see the live streaming as well as can control the movement of robotic unit. This paper gives an approach towards video surveillance and control using advanced processor like raspberry pi. The proposed system can be used in military applications just by adding few sensors like infrared sensors so as we can detect the movements. In health care applications the proposed system can be used just by changing the design the robotic unit.
Index Terms- Wi-Fi, Raspberry pi, Surveillance.
1. INTRODUCTION
An embedded web server creates an easy way for monitoring & controlling any device which is at remote place. For designing the system we require remote pc along with the internet facility at the remote locations. If we don’t have internet connectivity still we can use the unit using Wi-Fi. We implement a system which is portable, low cost & having less maintenance. The reporting of this real-time data corresponding to the process plants is therefore be of great use for future analysis.
As the internet of things is the concept, newly introduced in the field of electronics. The concept is about handling the things with the use of internet and the best model for these applications is raspberry pi. When the surveillance is considered, raspberry pi serve his purpose as it is good at connectivity simply plugging Wi-Fi dongle into one of its port [5].
Robots are being used in variety of industrial applications for various activities like pick and place, painting, assembling of subsystems and in hazardous places for material handling etc. Robots are becoming more and more advanced as technology increment in the areas of CPU speed, sensors, memories etc. And there is ever demanding applications even in defense. With the rapid growth of the Internet, more and more advanced devices or sensors have been embedded into it for performing
the desired work, distributed computer systems, surveillance cameras, telescopes and manipulators. Although the implementation of Internet robotics or web- based robotics is relatively new and still in its early stage, it has gathered the huge interest of many researchers in the world.
The proposed system consist of two units mainly a robotic unit and a remotely control unit. The robotic unit is consisting of the webcam, Wi-Fi dongle and the heart of the project, raspberry pi along with the PCB containing motor driven IC and voltage regulator circuitry.
2. SYSTEM OVERVIEW
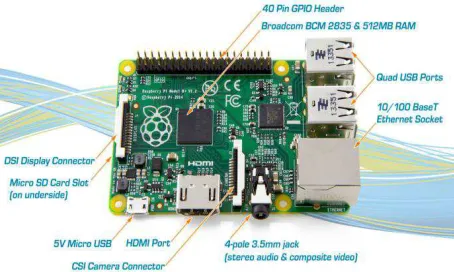
26 Fig 1. Raspberry Pi development Board
The Raspberry Pi is a minicomputer computer which can be used in electronic applications or projects, and for many of the things that your desktop PC does, like browsing, text editing and games. It also plays high-definition video and it has a built in Ethernet Connection so one get easy connectivity, at least for the most common boards. And we can easily add Wi-Fi connectivity by plug in a Wi-Fi dongle on one of the USB port. Raspberry Pi B+ has a strong processing capacity because of using the ARM11 architecture and Linux-based system there are simple and easy-used open source peripheral driver libraries [3].
The wheels of robot are controlled by DC motors and the movement of camera by the stepper motors. With the help of web browser, one can easily controls the robotic unit and can monitors video streaming of the surrounding environment of that robotic unit. At the robotic unit, Raspberry pi is used for the control of DC motors and stepper motors. Raspberry Pi requires 5 volt supply with minimum of 1500-2000mA current. This raspberry pi is powered through micro USB cable. ARM11 requires 3.3 volt of supply which it takes with the help of linear regulator. 5 volt is required for the USB ports. It operates at 700 MHz. We can use python to write the code into the raspberry pi.
3. BLOCK DIAGRAM
Fig 2. Block Diagram of Robotic Unit
The robotic unit consists of Wi-Fi dongle, a USB web cam, a PCB consisting motor driven IC and voltage regulator circuitry. The User unit consists of a PC within the Wi-Fi range. HTML page is designed having options of controlling the dc motors and stepper motors. It shows the live video streaming of the environment
4. HARDWARE REQUIREMENTS
Raspberry pi is used to control and monitor the robotic unit. A webcam is connected to one of its USB ports. A Wi-Fi dongle is provided so as raspberry can communicate over Wi-Fi. Internet can be provided to the raspberry through this.
A. Motor Control
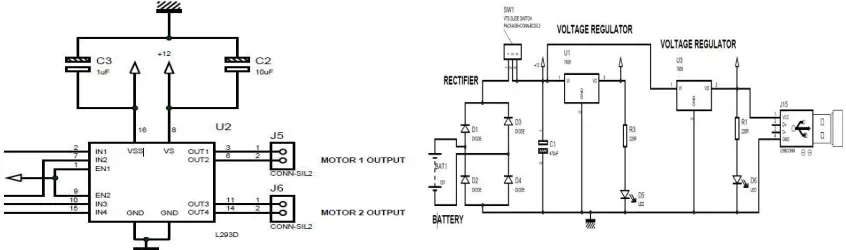
Here we can use L293D IC to control motors or L298 IC to control the motors. Normal DC gear-head motors requires current greater than 250-300mA. if we connect directly the motors to the ICs like timers, ATmega16 Microcontroller, 74 series ICs it will get damage because they cannot supply this amount of current, so that we should not connect motors to the output of any of the above given IC's, they might get damaged.
There is a need of a circuitry that can act as a bridge between the above mentioned ICs and the powerful devices like motors. So this is done Using L293D.
27 motors, used for wheels. The L293D IC connection
with dc motors is as shown below
Fig 3. Circuit diagram for L293D motor connection.
The logic for moving the motors in different directions is as shown below.
Table 1. L293D motor logic table
Input 1
Input 2 Input 3
Input 4
Action
1 0 0 1 Clockwise
rotation
0 1 1 0
Anti clockwise
rotation
0 0 0 0 Idle
1 1 1 1 Idle ( high Impedance)
B. power supply
The linear regulator is the basic building block of nearly every power supply used in electronics. The IC linear regulator is so easy to use that it is virtually foolproof, and so inexpensive that it is usually one of the cheapest components in an electronic assembly.
Every electronic circuit is designed to operate off of some supply voltage, which is usually assumed to be constant. A voltage regulator provides this constant DC output voltage and contains circuitry that continuously holds the output voltage at the design value regardless of changes in load current or input voltage
Here we used two IC 7805 for regulating purpose here we are using 12V power supply and we regulated it to 5V so that lot of heat dissipation takes place so that we require a heat sink to the IC 7805. This voltage regulator circuitry consist of a
bridge rectifier circuitry and other few basic components like resistors, capacitors and diodes
Fig 4. Voltage regulator circuit diagram
The raspberry unit is powered via the micro USB connector, only the power pins are connected, so it will not transfer data over this connection. A standard modern phone charger with a micro USB connector or a portable power bank will do, providing it can supply at least 700mA at +5Vdc [6].
5. IMPLEMENTATION METHOD
Prototype consists of a web camera, voltage regulator circuitry with L293D motor driver and raspberry pi. The real time video and control are displayed in the webpage which can be viewed from anywhere in the world using internet or within the Wi-Fi range and one can control it using those control provided.
Step 1 : Setting up the raspberry pi and installation of operating system from raspberrypi.org. Here we used raspbian OS.
Step 2 : Install the required packages in the pi using suitable commands in terminal window and connect the webcam to the pi, after this you will get MJPG-streamer folder.
Step 3 : Now design the control page that provides a way to control our robot this page is designed with HTML and PHP and write the controlling of the robot code based on the L293D IC logic we have used.
Step 4 : Connect a Wi-Fi dongle to connect raspberry Pi with Wi-Fi router. After connecting Wi-Fi dongle to PI, open WiConfig application this application is pre installed in raspbian OS & connect your PI with your Wi-Fi router. When it is connected with Wi-Fi router, IP Address can be found using ifconfig command.
28 Step 6 : Now build the Robotic unit, we can use DC
Motor based simple robot. To control your motors we need L293D IC. Here we used L293D ICs for controlling two motors.
Step 7 : Connection of power Supply. Here we used 12v rechargeable battery for driving the motors. But as per specifications Pi will work on 5 V, So we use IC 7805 for this and also an external portable battery bank can be used directly. We connect battery terminals directly to motor driver IC.
Fig 5. IP Control Robot Prototype
Step 8 : Pi gets turn on as soon as you connect 5V supply; you can see green LED blinking while start-up process. After some time open browser in your Laptop or mobile and write down following link: IP address /filename.
Now sitting in your room you can stream video and control the robot anywhere in the world.
Figure 6. Console Page for controlling and monitoring
6. CONCLUSION
Using this robotic system a remote area can be monitored easily from remote end. One can easily monitor as well as control the activity of the robotic unit. This system can be used any
conditions and areas where it is difficult for the security forces to reach it can monitor the areas. As the communication is done with the help of internet so limitation of range of operation does not arise and thus we can monitor any remote areas. If this robot is within the Wi-Fi range there is no need of internet too. We control the robot using the Wi-Fi as a medium.
7. FUTURE SCOPE
We can use this system for military applications installing suitable sensors. Just by changing the robotic unit design we can use it in hospitals for patient monitoring. Using some chemical sensors we can detect harmful gas leakage in the chamber the time delay which occurs in the execution of commands can be reduced and thus we can have more real time access to the robot. With reduced time delay we can have faster operation and quick response to any illegal activities in the monitored area. Also it can be used as a spy robot. The robot is very economical.
REFERENCES
[1] Wi-Fi Robot for Video Monitoring & Surveillance System By Pavan C & Dr. B. Sivakumar, International Journal of Scientific & Engineering Research Volume 3, Issue 8, August-2012.
[2] robot using Zigbee Communication By Krishnaswamy Kannan and Gowtham S, International Journal of Engineering Science and Technology (IJEST), ISSN : 0975-5462 Vol. 4 No.10 October 2012.
[3] Secured Spy IP Control Robot Using Raspberry Pi By V. Meenakshi, Ch. Lakshmi Saketh, K. KalyanKumar, International Journal of Emerging Technology and Advanced Engineering, Volume 5, Issue 2, February 2015.
[4] Wi-Fi Robot for Video Monitoring & Surveillance System by Pavan C & Dr. B. Sivakumar, International Journal of Scientific & Engineering Research Volume 3, Issue 8, August-2012
[5] Md Athiq UR Raza Ahamed M., Wajid Ahamed, A Domestic Robot for Security Systems by Video Surveillance Using Zigbee Technology, International Journal of Scientific Engineering and Technology (ISSN : 2277-1581) Volume 2 Issue 5, pp : 448-453 1 May 2013.
29 Robotics and Automation Magazine, pages 41-47,
March 2000.
[7] Huosheng Hu, Lixiang Yu, Pui Wo Tsui, Quan Zhou, Internet-based Robotic Systems for
Teleoperation, International Journal of Assembly Automation, Vol. 21, No. 2.
Prof. I. Y. Sheikh, M.E. (Electronics), MBA. Assistant Professor Department of E&TC PLITMS, Buldana (MS) India. SGBAU, Amravati University. Area of interest: Digital Electronics, EMBEDDED System.
(Email:[email protected]).
Mr. Harshal C. Chavan Currently
persuing his bachelor degree in Electronics & Telecommunication Engg from PLITMS College of Engineering Buldana, SGBAU Amravati University, Maharashtra
state, India
(Email:[email protected]). Interested in the Digital Electronics.
Miss. Sampada B. Mahajan.
Received the Diploma in E&TC from MSBTE Mumbai in 2013.Currently persuing her bachelor Degree in E&TC Engg from PLITMS College of Engineering Buldana, SGBAU Amravati University, Maharashtra
state, India
(Email:[email protected] m). Interested in the EMBEDDED, VLSI and RTS.
Miss. Jaya S. Vyawhare . Received
the Diploma in E&TC from MSBTE Mumbai in 2013.Currently persuing her bachelor Degree in E&TC Engg
from PLITMS College of
Engineering Buldana, SGBAU Amravati University, Maharashtra
state, India
(Email:[email protected]). Interested in the EMBEDDED, Digital Electronics and Signal processing.
Mr. Rahul S. Raut Currently
pursuing his bachelor degree in Electronics & Telecommunication Engg from PLITMS College of Engineering Buldana, SGBAU Amravati University, Maharashtra
state, India