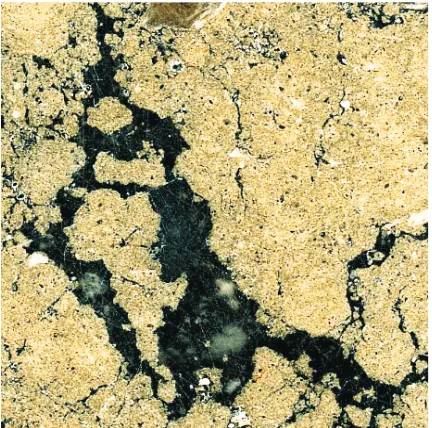
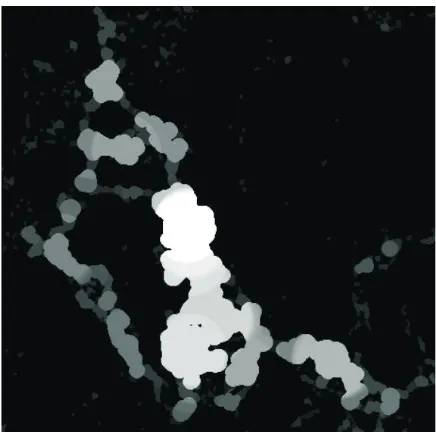
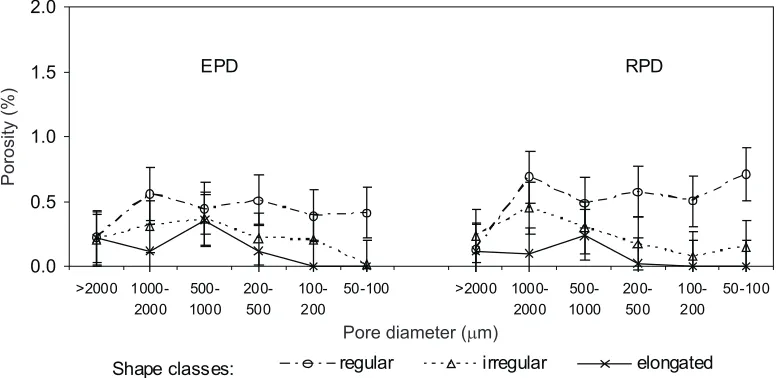
Application of image analysis for soil macropore characterization according to pore diameter
Full text
Figure

Related documents
Field experiments were conducted at Ebonyi State University Research Farm during 2009 and 2010 farming seasons to evaluate the effect of intercropping maize with
The prematurely born infant almost in variably develops iron deficiency anemia unless supplemental iron is given. The ade quacy of iron nutrition of the mother,15 perinata!
After successfully supporting the development of the wind power technology, an approach is needed to include the owners of wind turbines in the task of realizing other ways, other
3: The effect of PTU-exposure (1.5, 3, and 6 ppm) and levothyroxine therapy (Hypo 6 ppm + Levo) on the distance moved (A) and the escape latency (B) of the male
Мөн БЗДүүргийн нохойн уушгины жижиг гуурсанцрын хучуур эсийн болон гөлгөр булчингийн ширхгийн гиперплази (4-р зураг), Чингэлтэй дүүргийн нохойн уушгинд том
The high level of coastal litter in the study region adds to the findings of the Report on the State of the Mediterranean Marine and Coastal Environment, which
Sponge (Porifera) from the Mediterranean Coast of Turkey (Levantine Sea, eastern Mediterranean), with a Checklist of Sponges from the Coasts of Turkey..
In Sections II the Application of Iterative Learning strategy in Uncalibrated Vision-Based Robot Manipulators Control shown .In Sections III, simulation results are
