IJST, Transactions of Electrical Engineering, Vol. 38, No. E2, pp 165-175 Printed in The Islamic Republic of Iran, 2014
© Shiraz University
DIRECTION OF ARRIVAL CALIBRATION USING
ITERATIVE LEARNING CONTROL*
S. SOLTANI** AND P. KARIMAGHAEE
School of Electrical and Computer Engineering. Shiraz University. I. R. of Iran Email: sinasoltani@shirazu.ac.ir
Abstract– In this paper, an array calibration method focusing on Direction of Arrival (DOA) on narrowband signals is presented. An array calibration procedure expresses adaptive beam forming and direction finding, which includes unknown phase and gain perturbation of the active sensor. The main purpose of this study is estimation of DOA on two or more known signal sources using Iterative Learning Control (ILC) method. Due to ILC learning ability, the amount of required calculations decreases. Furthermore, ILC method has a simple structure for working on-line. As ILC is a model-free method, it requires little modeling knowledge, making it suitable for use in DOA. In this paper, a new method is proposed for finding DOA of long distance targets in sonar systems. Moreover, in the last section the simulation results approves improvement in performance of the proposed method and helps show the capabilities of the method presented.
Keywords– DOA estimation, iterative learning control, active sonar and radar
1. INTRODUCTION
Increase of the accuracy and speed of target detection is an important goal in sonar and radar systems. Currently, a high-resolution frequency method that is being used for detection, is mainly based on the structure of the distribution function of the Cohen family [1]. This article introduces a new method for finding DOA in multi-input, multi-output sonar systems and array signals in active sensor devices.
In active sonars and radars, estimation of DOA in presence of noise requires a high resolution and a robust method. Since ILC is a robust optimal method in various control fields [2], it is appropriate for solving DOA problem in active sonar and radar system.
Uncertainty in array manifold sensors can be expressed in one or any combination of parameters such as location, frequency, gain & phase and mutual coupling with sensor. These errors are inevitable in practical systems. Since the uncertainty is in the actual array system, the array manifold is only nominal and not true. Therefore, estimation of the true one is required before processing array data [3]. Furthermore, in most of the published papers, it was supposed that the array manifolds in the field of array processing systems are known [3].
In this paper, we focus on the narrow-band signals. Of course, we know that in order to find DOA on wide-band signals the output of each sensor can be converted into a narrow-band signal with the aid of Fast Fourier Transform (FFT) and filter banks [4]. Therefore, wide-band signal and its applications will be discussed.
Since the new method that is presented in this paper has not been used for sensor calibration on sonar or other applications, we will look at the history of this method, which has been employed in control systems.
S. Soltani and P. Karimaghaee
IJST, Transactions of Electrical Engineering, Volume 38, Number E2 December 2014 166
Today, in modern technology smart control systems play an effective role in the development and improvement of industries. Therefore, by developing science and technology, industries are built with intelligent control algorithms which are aimed to improve the safety and operation of machines. In control engineering, studies on learning control are inspired by human capabilities and behavior. The main feature being employed in control engineering is the use of control signals to improve system performance. Iterative Learning Control (ILC) is a new field and yet stabilized in the control. In 1978 in Japan, Uchyama published the basic idea of iterative learning control in Japanese language. Later, in 1984 and 1989, Arimoto, Kawamura, et al and Goodwin, et al presented the exact definition of ILC in English [5-6]. ILC has a large number of control applications, such as robotics, control task, etc [7].
The main idea behind ILC is derived from the ability of human learning. Human beings learn by rehearsing until the end of practice. The basic idea of ILC is that when the earliest trial is completed, the algorithm uses earliest trial outputs, inputs and errors to improve performance from trial to trial.
Although all previous references for application of ILC are in control field, in this paper, control aspects are not considered and the proposed method focuses on calibration.
By storing the error signal and control input in previous iterations, ILC method calculates a new command. Thus, learning process in ILC method, is similar to human memory. There is a difference between ILC and other methods, using the idea of learning such as adaptive control and neural networks. The idea of adaptive control and neural networks is to modify the controller that is a system itself. On the other hand, in ILC the input control signal is modified at each iteration.
Note that in this article we talk about calibration process. Therefore, we try to perform a repetitive process of the calibration method, which is used with ILC. The adjustable complex vector weights in each dimension can be improved.
In this paper, ILC method is introduced and is employed along with Weighted Iterative Learning Control (WILC) to solve DOA problem. Afterwards, WILC is compared with the Weighted Least Means Square (WLMS) and Weighted Recursive Least squares (WRLS) methods. Finally, the effect of WILC method on Signal to Noise Ratio (SNR) is evaluated.
2. DOA CALIBRATION METHODS
a) DOA signal model
To define an array reference in a sonar system coordinate in Fig. 1 consider a narrow-band sonar system with arbitrarily N radiation transmitting sources and M receiving sensors for the sonar identical system. In addition, we can assume a wide-band sonar system with N transmitting orthogonal sources and decompose output of the sonar identical system by using an N point FFT in each segment into the L segment. Targets of DOA are assumed to be in the far field of the array.
In Fig. 2, the structure of the L segment narrow-band array is shown. The array response into the plant waveform in direction of (φ, ɸ) is defined as:
, , ∗ , , (1)
Where is Hermitain transpose and W is adjustable complex vector weights of L dimensional:
December 201
Based on Fi
Where T is
where:
where c is th an array:
And in ,
where simplificatio
14 ig. 2 we can
transposed a
he propagati
, ∅ , is
is the prop on we can w
Fig. 2. S introduce:
and , ,
, , ∅
ion of wave s
sensor locati
pagation of w write:
Direction of a
IJ Fig. 1. Array
Signal structur
Y
is a vecto
, , ∅
, , ∅
2 c
speed and
ion (distance
wave delay
arrival calibrati
IJST, Transacti y and wave co
re for narrowb
(
T H
Y
W
x
r of L dimen
…
, … ,
cos cos ∅
is a com
| |
e between sen
between nt
ion using…
ions of Electric o-ordinates
band beam for
( )
t
nsional:
∗ , , ∅
sin sin ∅
mplex respon
nsor 1 and n)
th sensors a
cal Engineering
rming
sin ∅
se of receivin
). According
and mth sou
g, Volume 38, N
ng sensor sig
g to Fig. 1 we
urces. In Fig
Number E2 167
(3)
(4)
(5)
(6)
(7)
gnals with
(8)
e have:
(9)
IJST, Transac 168
The output
where is exclusive. B
Using ILC can be intro
where is s
b) Iterative
In mos they are usu this case, it idea of ILC iteration to drive equati
Considering
Where input-outpu input and ou in Laplace d
Where As it c processing p
ctions of Electr of nth sensor
s mth emitter By employin
method, we oduced as:
steering vect
learning
st repetitive p ually used fo t is known a C is using con
iteration. Co ion of ILC to
g Fig. 3 and E
is a
n
ut in each ite utput of the domain, whic
is the mag can be seen, problems as
rical Engineeri r elements ca
r signal sourc g Fourier tra
1 √
find that W
or.
processes, ite or repetitive t as an iterativ ntrol input fr onvergence o
o find stabilit
Eq. (12), we
m
transfer eration and system in the ch has frequegnitude chara this configu well as contr
S. Soltani
ing, Volume 38 an be written
ce and is i ansforms, the
W is a correla
erative learni trajectory tra e learning co rom previou of algorithms ty convergen Fig. can assume x t function in denotes th e previous sa ency charact
acteristic and uration may b
rol problems
i and P. Karim
8, Number E2
sin
n as:
ith sensor no e output signa
ation of steer
∗
ing algorithm acking proble ontrol (ILC) s force of ea s is the most nce condition
3. ILC structu the closed lo
G θ ∗ u t
terms of an he noise com ample as illu teristics as:
d is the be used in ev s.
aghaee
cos
oise sample a al in the freq
ring vector in
∗
ms are well-k ems, but they ) [2]. Inspire ach iteration important m ns.
ure
oop system m
η
ngle, which e mponent. Fur ustrated in Fi
e phase chara very feedbac
additive. quency doma
n each way.
known metho y are not lim ed from hum to improve matter. Theref
model as:
explains the rthermore, u ig. 3. G θ i
acteristic. ck and close
Dece
1 are ain will be:
Output patte
ods. In contr mited to these man learning, the performa fore, in this s
relationship uk-1(t) and xk
s the transfe
ed loop form
ember 2014 (10) (11) e mutually (12) ern signal (13) rol theory, e cases. In the main ance from section we (14) p between (t) denote r function (15)
Direction of arrival calibration using…
December 2014 IJST, Transactions of Electrical Engineering, Volume 38, Number E2 169
Let us introduce the Laplace transform of the ILC law as follows:
u γ ∗ s ∗ (16)
Equation (16) provides an estimation of the present value of input from data provided by the previous sample. Where γ and ψ s are the learning gain and the compensator in the Laplace domain, respectively. In Eq. (15), e is the error at k-1th iteration. The frequency characteristic of learning compensator is.
jw (17)
where k w is the magnitude characteristic and θ w is the phase characteristic. In order to find the condition of error tracking in ILC, we have:
(18)
Where S(s) and X s are source signals (reference trajectory) and output sensor signals (plant output at iteration k), respectively. By replacing X sfrom Eq. (14) and substituting uk(s) by Eq. 16, we have:
(19)
Therefore, Eq. (18) can be rewritten as:
1 γ (20)
1 γ (21)
(22)
According to Goh, (1994) [8] and Hideg & Judd, (1988) [9], after taking norm of side of the above equation and using Schwarz’s theorem in Inequality matrix, the tracking error at steady state and converge, if the condition below is satisfied:
1 & lim → 0 (23)
According to condition of G 1 and if γ 0 [10]
γ 2cos (24)
90° ∗ 360° 90°; 0, 1, 2, 3, ⋯ (25)
According to Yongqiang Ye, et al. (2009) [10], condition of Eq. (25) is critical since when the condition is satisfied we could always find a (learning gain) sufficiently small to satisfy Eq. (24). So the frequency range in which condition (25) holds, ultimately learnable band is named. For minimum phase systems, in condition (25) is normally negative and 0 and according to at Eq. (21), must provide positive phase. For non-minimum phase systems that start from 360 at dc, 1 so that
∗ 360° is 0 at dc and negative at other frequencies, where must be positive again. In either case, development phase is needed to ensure a wider learnable band. This ensures higher tracking accuracy.
According to Hebb rule [11-12] and Eq. (3), adaptive law for weighted vector can be defined as:
* 1
( ) ( ) ( )
k k k k
W jw W
X jw e jw (26)IJST, Transac 170
ILC h Proportiona types of ILC
ILC m optimal gain speed and increase acc uniform dis
In this
c) D-type IL
Since tracking pro learning law condition of al. [10]. In a
Finally, we
d) P-type IL
The sc According t
ctions of Electr as six types al-Integral (P
C can be foun method work
ns for appro accuracy ca curacy and v
tribution of c paper, we fo
LC
the derivativ ocess, Also, w of D-type f D-type in L a similar fash
have:
LC
cheme of (2 to D-type and
rical Engineeri s: Proportion PI) and Propo
nd in [2, 13-s in both tim oximation are an be change vice versa. In convergence ocus on tradit
ve of error less error is e. In 2001 a Laplace dom
hion for D-ty
180°
8) is called d with slight
S. Soltani
ing, Volume 38 nal (P), De ortional-Integ
14]. Furtherm me interval e unknown. ed. For exam n [15], detai e in ILC by c tional P, D a
is used in D s made comp and 2005 by main was deri
ype accordin Fig. 4 1 L ∗ P-type, sinc t manipulatio Fig. 5
i and P. Karim
8, Number E2 rivative (D) gral-Derivati more, the con
and discrete Therefore, b mple, smalle ls on the tra hoosing lear and PD-types
D-type, fewe pared to P-ty y Chen et a
ved and fina g to Fig. 4 w
. D-type struc
L
L
∗ 360° 0°;
ce a derivat on of D-type
. P-type struct aghaee
), Proportion ive (PID). M ncept and sta e-time doma by altering
er values of de off betwe rning gain ca s of ILC for ser numbers ype. In 1984 al and Wang ally in 2009 i we have:
cture
1
0, 1, 2,
ive is obvio equations, fo
ture
nal-Derivativ More details o ability of ILC ains. In all t
(the learninf
decreas een smoothin an be found.solving DOA
of iterations 4, Arimoto e g et al. [16-it was revised
, 3, ⋯
ously not use for P-type (Fi
Dece ve (PD), Int on the aforem C are discuss types of ILC ng gain), con e learning s ng noise inte
A problem.
s are require et al. [5] pro -17], the con
d by Yongqi
ed for track ig. 5) we hav
ember 2014 tegral (I), mentioned sed in [2]. C method,
nvergence speed and ensity and
ed for the oposed the nvergence iang Ye et
(27)
(28)
(29)
December 201 and
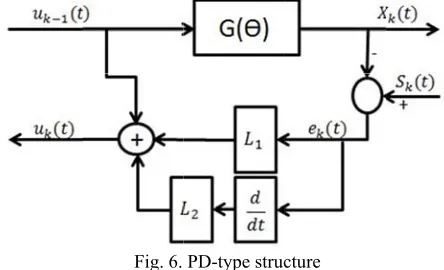
e) PD-type I
In the control usin laws. In thi current itera nonlinear sy have:
By employi
and
Now we try with n=8 s represents f
in 20
in ILC meth
14 ILC
improved c ng current tr s scheme, th ation and the ystems with
ing frequency
y to extend t sensors for N far-field sour
0 and 2 hod. In Fig. 7
90°
ontrol schem racking error he control law e first and hi h perturbation
y characteris
L L
L
45°
the aforemen N=500 (N d rce that work 20. We use IL
7 - learning c
Direction of a
IJ
1
∗ 3
me, PD-type r since PD-ty w for next it igher-order d n [18-19]. W
Fig. 6.
1 L
stics h
2 c
L
∗ 3
3. SIMUL
ntioned contr denotes the ks in f=50 Hz
LC to find D curve is show
arrival calibrati
IJST, Transacti
L
L
360° 90°;
of ILC is t ype ILC wo teration is ob derivatives o With combin
PD-type struc
L
L
have:
cos
2 √2 cos
360° 45°;
LATION RE
rol algorithm number of z, with SNR DOA, we use wn for P, D a
ion using…
ions of Electric
1
0, 1, 2,
the full form orks with pre btained from of the error. T
nation of P&
cture
L
1
90° cos
45°
0, 1, 2,
ESULT
ms to a DOA samples), d=
10dB for ea e i=200 in w and PD-type.
cal Engineering
, 3, ⋯
m of the P-ty evious tracki m the control The PD-type &D-type, for
°
, 3, ⋯
A problem. C =λ/2 (λ is w
ch source. T which i shows
.
g, Volume 38, N ype and PD ing error for l input inform e of ILC is o
PD-type (F
Consider a lin wavelength) Two targets a s number of
Number E2 171
(30)
(31)
(32)
feedback r updating mation on offered for Fig. 6) we
(33)
(34)
(35)
(36)
(37)
IJST, Transac 172
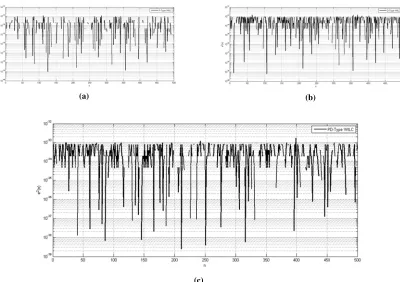
In Fig. 8 no iteration and
ctions of Electr Fi
ormalized DO d the same p
Fig. 8
rical Engineeri ig. 7. Normali
OA is shown parameters.
(a)
(c)
8. Normalized d
S. Soltani
ing, Volume 38 ized learning c
n for three typ
direction of arri (d) P-Type W
i and P. Karim
8, Number E2 curve. P-Type
pes of ILC (
(e) ival. (a) WRLS WILC. (e) PD-T
aghaee
e, D-Type, PD
P, D and PD
S. (b) WLMS. (c Type WILC
D-Type WILC
D), WMLS an
(b)
(d)
c) D-Type WIL
Dece nd RLS with
LC.
December 201 In Fig. 9 squ array square
Fig. 9.
In Fig. 11, Simulation
Where
^ an14 uare error of e error for W
Square error i
root mean results of all
nd m are esti
f WILC is sh WILC, WLMS
(a)
in the last itera
Fig. 10. M
square erro l five method
imations of
Direction of a
IJ hown in the la S and WRLS
ation (i=300).
Mean value of
or (RMSE) ds are averag
2
{
mE
*
in the ktharrival calibrati
IJST, Transacti ast iteration S, respectivel
(c)
. (a) P-Type W
f array square
is presented ged form 100
2 ^ *
1
( )
m mk
run of Mont
ion using…
ions of Electric (i=300), Fig. ly in each ite
WILC. (b) D-T
error versus it
d in terms o 0 Monte Carl
1
2 2
}
m
e Carlo and ncal Engineering . 10 exhibits eration.
(b)
Type WILC. (
teration
of ranging f lo runs [20].
number of so
g, Volume 38, N the mean va
c) PD-Type W
from -60dB RMSE is de
ources, respe
Number E2 173
alue of the
WILC
to 60dB. fined as
(38)
IJST, Transac 174
Iterative Le a new innov radar system repeating in it suitable fo paper, two w with WILC Simulation
1. Chang, S active se 2. Xu, J. X 3. Ng, B. P
direction 4. El-Keyi, wideban 5. Arimoto
systems,
6. Middleto a robot p 7. Nguyen, quadrati 8. Goh, C.
and cont
9. Hideg, L
Proceed
10. Ye, Y., T pp.
257-ctions of Electr earning Contr vative metho
ms. In contr n a finite tim for online sys well-known C. Finally, the
results prove
S. H., Liu, J. C ensor. Journal
X. & Tan, Y. (2 P., Er, M. H. n finding. IEE
, A. & Kirub nd signals. Sig
o, S., Kawamu Vol. 1, No. 2 on, R. H., Goo performing a r , D. H. & Ba c performance J. (1994). A
trol, Vol. 116
L. M. & Judd
dings of the 27
Tayebi, A. & -264.
rical Engineeri rol is a powe od for DOA e rol applicati me interval. IL
stems. ILC is basic metho e effect of p ed the WILC
C. & Chiu, C.
l of Marine Sc
2003). Linear & Kot, C. (1
E
Proceedings-barajan, T. (2
gnal Processin
ura, S. & Miya 2, pp. 123-140
odwin, G. C. repetitive task anjerdpongch e criterion. Jo
frequency dom , No. 4, pp. 78 d, R. P. (1988
7th IEEE Conf
Liu, X. (2009
S. Soltani
ing, Volume 38 Fig. 11.
4. CO
erful method estimation. It ion, ILC me LC has a sim s a free-mod ods, WLMS providing WI C abilities in D
RE
. W. (2001). A
cience and Tec
and nonlinear 994). Array g
-Radar, Sonar
2008). Adapti
ng, Vol. 88, N
azaki, F. (198 0.
& Longman, k. The Internat
ai, D. (2009)
ournal of proce
main analysis 81-786. 8). Frequency
ference on IEE
9). All-pass fi
i and P. Karim
8, Number E2 RMSE versus
ONCLUSIO
d in control s t was employ ethod was u mple structure
el method; th and WRLS, ILC was inv DOA proble
EFERENCE
Applying time
chnology, Vol
r iterative lear gain/phase cal
r and Navigat
ive beamspac o. 8, pp. 2063 4). Bettering
R. W. (1989)
tional Journal
). An LMI ap
ess control, V
s of learning c
domain analy
EE, pp. 586-5
iltering in iter aghaee
s SNR
ON
systems. In th yed for Narro used for trac
e and high c hus, little mo
were applie vestigated usi em.
S
e-frequency di l. 9, No. 2, pp rning control. libration techn
tion, Vol. 141
ce focusing fo 3-2077.
operation of r
. A method fo
l of Robotics R
pproach for r Vol. 19, No. 6, control. Journ
ysis of learnin 91.
rative learning
his paper thi ow-band and cking the re computationa odel knowled d to DOA p ing an exam
istribution fun p. 161-166.
Vol. 291, Ber niques for ada , No. 1, pp. 25 for direction o
robots by learn
or improving t
Research, Vol
robust iterativ pp. 1054-106
nal of dynamic
ng systems. In
g control. Auto
Dece is method wa d wide-band eference traj al speed, whi dge is require
roblem and mple of DOA
nction to DOA
rlin: Springer. aptive beamfo 5-29. of arrival est
ning. Journal
the dynamic a l. 8, No. 5, pp ve learning co
60.
c systems, mea
n Decision an
omatica, Vol.
ember 2014 as used as
sonar and ectory by ich makes ed. In this compared A problem.
A of mobile
. orming and imation of of Robotic accuracy of p. 67-74. ontrol with asurement, nd Control,
Direction of arrival calibration using…
December 2014 IJST, Transactions of Electrical Engineering, Volume 38, Number E2 175
11. Rajkumar, B., Gopikiran, T., & Satyanarayana, S. (2013). Neural network design in cloud computing. Int. J. Comput. Trends Technol, Vol. 4, No. 2, pp. 63-67.
12. Teshnehlab, M. & Watanabe, K. (1999). Intelligent control based on flexible neural networks. Kluwer Academic
Publishers.
13. Li, Y., Chen, Y., Ahn, H. S. & Tian, G. (2013). A survey on fractional-order iterative learning control. Journal of Optimization Theory and Applications, Vol. 156, No. 1, pp. 127-140.
14. Bristow, D. A., Tharayil, M. & Alleyne, A. G. (2006). A survey of iterative learning control. Control Systems, IEEE, Vol. 26, No. 3, pp. 96-114.
15. Ahn, H. S., Chen, Y. & Moore, K. L. (2007). Iterative learning control: brief survey and categorization. IEEE Transactions on Systems Man and Cybernetics Part C Applications and Reviews, Vol. 37, No. 6, p. 1099.
16. Huang, D., Xu, J. X., Li, X., Xu, C. & Yu, M. (2013). D-type anticipatory iterative learning control for a class of inhomogeneous heat equations. Automatica, Vol. 49, No. 8, pp. 2397-2408.
17. Wang, D. & Ye, Y. (2005). Design and experiments of anticipatory learning control: Frequency-domain approach. Mechatronics, IEEE/ASME Transactions on, Vol. 10, no. 3, pp. 305-313.
18. Ouyang, P. R., Zhang, W. J. & Gupta, M. M. (2007). PD-type on-line learning control for systems with state uncertainties and measurement disturbances. Control and Intelligent Systems, Vol. 35, No. 4, p. 351.
19. Chen, F. M., Tsai, J. S. H., Liao, Y. T., Guo, S. M., Ho, M. C., Shaw, F. Z. & Shieh, L. S. (2014). An improvement on the transient response of tracking for the sampled-data system based on an improved PD-type iterative learning control. Journal of the Franklin Institute, Vol. 351, No. 2, pp. 1130-1150.
20. Der Minassians, A. & Gharehpetian, G. B. (2004). Decoupled AC/DC load flow for Monte Carlo simulation of metro power system. Iranian Journal of Science & Technology, Transaction B: Engineering, Vol. 28, No. 3, pp.