S
PACECRAFT
D
YNAMICS FOR
S
AMPLE
A
CQUISITION
Sample collection from near Earth objects presents an opportunity to
study the beginning of the Solar System and provide information on the
impact risk of various asteroids. A successful sample return mission has
many requirements including a sampling device appropriate for the
object visited and the development of the dynamical equations necessary
for landing.
Jae Lynch
5/15/2012
Table of Contents
List of Tables
1
List of Figures
1
List of Variables
2
Introduction
3
Why Collect Samples?
3
What are the Theories that can be Tested?
3
What can we Learn?
4
Background
4
Hera
4
Dawn
4
Hayabusa
5
OSIRIS-Rex
5
Marco-Polo
5
Methods
6
Drill and Abrasion Methods
6
Other Methods
6
Requirements
7
Optimal Method
7
Mission Outline
8
Asteroid Characteristics
8
Equations
10
Future Work
11
Conclusions
11
Appendix A
12
Bibliography
14
1
List of Tables
Table 1: Close Approaches of RQ36 for the next 25 Years (8) 8 Table 2: Physical Characterisitcs of RQ36 (8) 9 Table 3: Orbital Parameters of RQ36 (8) 9
List of Figures
Figure 1: The Process of Solar System Formation (3) 3 Figure 2:Microscopic Grains from the Hayabusa Mission (4) 4
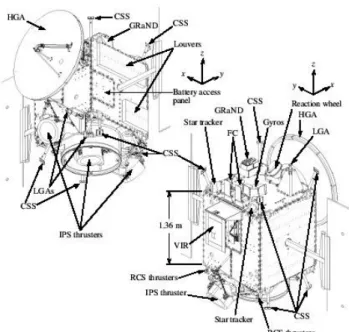
Figure 3: The Dawn Spacecraft (5) 5
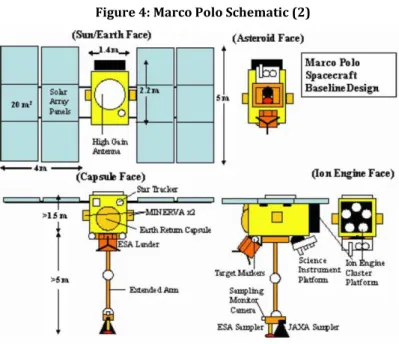
Figure 4: Marco Polo Schematic (2) 6
Figure 5 Rock Abrasion Tool (12) 7
Figure 6: Doppler Images of RQ36 (1) 8 Figure 7: Orbit of Apollo Asteroids (7) 9
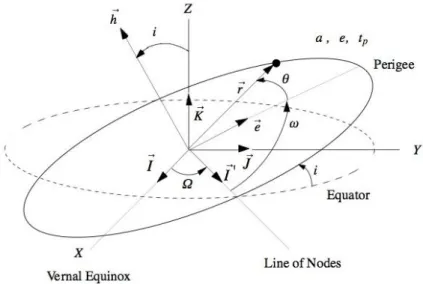
Figure 8: Orbital Elements (15) 10
2
List of Variables
𝑎: 𝑆𝑒𝑚𝑖𝑚𝑎𝑗𝑜𝑟 𝐴𝑥𝑖𝑠 𝑒: 𝐸𝑐𝑐𝑒𝑛𝑡𝑟𝑖𝑐𝑖𝑡𝑦 𝑖: 𝐼𝑛𝑐𝑙𝑖𝑛𝑎𝑡𝑖𝑜𝑛 𝜔: 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑒 𝑜𝑓 𝐴𝑠𝑐𝑒𝑛𝑑𝑖𝑛𝑔 𝑁𝑜𝑑𝑒 Ω: 𝐴𝑟𝑔𝑢𝑚𝑒𝑛𝑡 𝑜𝑓 𝑃𝑒𝑟𝑖𝑒𝑙𝑖𝑜𝑛 𝑀: 𝑀𝑒𝑎𝑛 𝐴𝑛𝑜𝑚𝑎𝑙𝑦 𝜈: 𝑇𝑟𝑢𝑒 𝐴𝑛𝑜𝑚𝑎𝑙𝑦 𝜇: 𝐺𝑟𝑎𝑣𝑖𝑡𝑎𝑡𝑖𝑜𝑛𝑎𝑙 𝑃𝑎𝑟𝑎𝑚𝑒𝑡𝑒𝑟 𝑇: 𝑃𝑒𝑟𝑖𝑜𝑑 𝑝: 𝐴𝑟𝑔𝑢𝑚𝑒𝑛𝑡 𝑜𝑓 𝑃𝑒𝑟𝑖𝑎𝑝𝑠𝑒𝑠 𝐺: 𝐺𝑟𝑎𝑣𝑖𝑡𝑎𝑡𝑖𝑜𝑛𝑎𝑙 𝐶𝑜𝑛𝑠𝑡𝑎𝑛𝑡 = 6.67384 ∗ 10−11 𝑚3 𝑘𝑔 ∗𝑠2 𝑟: 𝑃𝑜𝑠𝑖𝑡𝑖𝑜𝑛 𝑉𝑒𝑐𝑡𝑜𝑟 𝑜𝑓 𝑆𝑝𝑎𝑐𝑒𝑐𝑟𝑎𝑓𝑡 𝑅: 𝑃𝑜𝑠𝑖𝑡𝑖𝑜𝑛 𝑉𝑒𝑐𝑡𝑜𝑟 𝑜𝑓 𝐴𝑠𝑡𝑒𝑟𝑜𝑖𝑑 𝑛: 𝑀𝑒𝑎𝑛 𝑀𝑜𝑡𝑖𝑜𝑛3
Introduction
Why Collect Samples?
Sample collection from Near Earth Objects presents an opportunity to study the beginning of the Solar System and the early conditions within the planetary nebula. Because asteroids are thought to contain materials which have existed largely unchanged since the formation of the Solar System, samples from these asteroids can provide insight into how the solar system developed and the time scale over which this development occurred.
Deflection strategies are another aspect of studying and collecting samples from these objects. By understanding the composition of the object, its mass, shape, spin, cohesiveness, and other factors it is possible to develop methods to deflect the asteroid from future impacts with the Earth.
Optimally, these samples are returned to Earth to provide the best possible analysis. On site measurements are limited by a variety of factors including the mass and power requirements of the instrumentation, the volume of system components, and the reliability of these measurements. By returning the sample to a lab, accuracy is increased, a more diverse range of studies can be conducted, and the samples can be retained for further analysis. By obtaining samples from Near Earth Objects scientists can select a family of objects to study, a specific type of object, or simply a conveniently located object. Even if only one object is selected for study, the samples returned are invaluable. Without actively collecting samples the only ones available for study are those returned from the moon and meteorites. Both are limited to a small number of samples. Those from the meteorites are also commonly limited to metallic samples which are not from the early formation of the solar system. These meteors instead come from the interiors of protoplanets which were destroyed during formation.
What are the Theories that can be Tested?
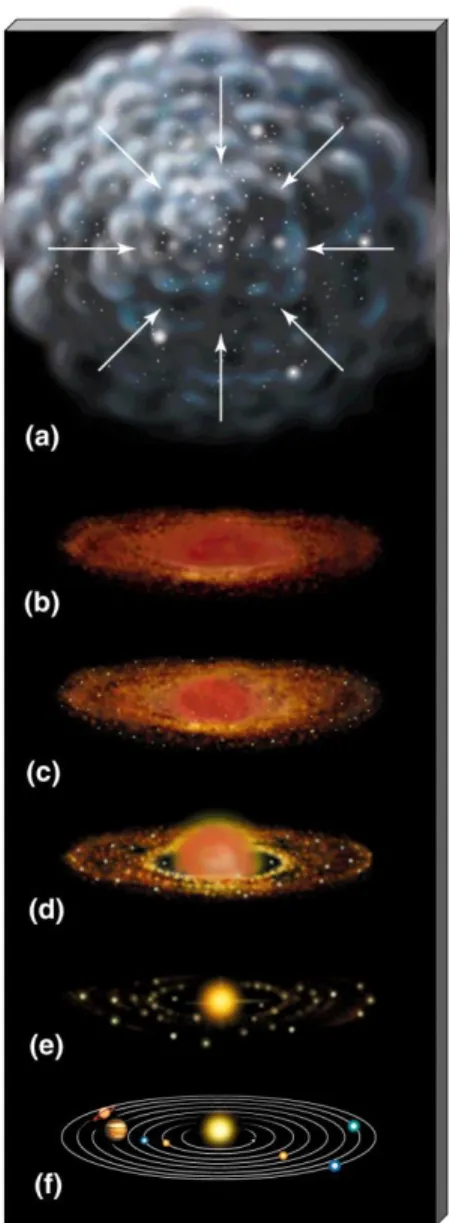
The theory of solar system formation states that the Solar System began as a massive cloud of dust made up of hydrogen and various metals as shown in (a) of Figure 1 Something caused this cloud to begin to collapse. Possibly this was due to interaction with the shock wave from a supernova, magnetic fields, or stellar winds. This catalyst is unknown and requires samples to provide evidence. As the solar nebula began to collapse, it formed a disk which began spinning faster as it became smaller (b). Matter continually collided with and adhered to other matter (b-c). As these pieces of matter gained in size, their growth rate increased as they became large enough to pull in more and more matter. One of these objects became large enough to begin fusion (e), others became terrestrial and Jovian planets, and the rest was either swept away by solar radiation or remained as asteroids, comets, and other debris (f).
Figure 1: The Process of Solar System Formation (3)
4
The timescale of solar system formation can be studied as well. According to the theory of solar system formation, the sun and planets formed approximately 4.5 billion years ago. Over millions of years these bodies formed into the masses present today. This timescale can be examined in greater detail by studying the material returned.
What can we Learn?
By analyzing the sample to determine the chemical composition, the relative abundance of various elements present in the early solar system can be determined. Through radiometric dating and knowledge of the decay rates of the elements, it is possible to work backwards to determine what was present in the early solar system based on what is present in the asteroid now. This can yield information about the origin of these materials.
Obtaining samples has the potential to answer several questions including:
What are the Solar System processes accompanying planet formation? What are the physical properties of
the material comprising the building blocks of terrestrial planets?
Do NEA’s contain pre-Solar System material?
Were there any molecules necessary for life in the early Solar System and where did they come from?
Background
Hera
The Hera mission is a proposal by the University of Arkansas Center for Space and Planetary Sciences. Initially this mission was to be launched in January 2006 and last 4.5 years. The goal is to visit three asteroids, observe each for up to a year, and collect three samples, of approximately 300 g, from each. [9]
Dawn
Dawn is a NASA mission to observe two of the largest known asteroids, Ceres and Vesta. This mission does not include landing on either asteroid but shares many of the scientific goals of sampling mission. It seeks to understand the role of both size and water in determining the evolution of planets. Ceres is a primitive asteroid which may have active hydrological processes and seasonal polar caps. Vesta is a more evolved body with, potentially, highly magnetized rocks. Dawn seeks to contrast the evolution of these two asteroids (4).
5
Hayabusa
A mission conducted by the Japan Aerospace Exploration Agency (JAXA), Hayabusa is a sample return mission launched in 2003 with the intention of obtaining three samples from the asteroid Itokawa. The spacecraft utilized four ion engines and a gravity assist from Earth to reach the asteroid. The intent was to fire pellets into the surface of the asteroid and collect the ejected material (8). Due to a number of mechanical failures including two reaction wheels, a temporary loss of communications, and a damaged thruster, Hayabusa was unable to obtain the desired samples. The spacecraft was however successful in returning approximately 1500 grains of dust for analysis. (4)
OSIRIS-REx
OSIRIS-REx is a National Aeronautics and Space Administration (NASA) mission proposed by the University of Arizona to study the asteroid RQ36. This mission, which would be launched in 2016, uses chemical engines and a gravity assist to propel it to the asteroid. Once there, OSIRIS-REx would sample the asteroid through a touch and go technique. In this way the spacecraft does not land on the asteroid but merely contacts it through an extended arm.
Marco-polo
Marco Polo is a joint mission between the European Space Agency (ESA) and JAXA. This mission would also use a touch and go maneuver to obtain a sample. It would also release a small form of rover on the surface of the asteroid to study it further. Sample collection would occur through the use of both a sticky footpad and retractable arm much like Hayabusa used. A schematic for the spacecraft is given in Figure 4.
6
Methods
Drill and Abrasion Methods
A possible method of sample collection is the use of a low power drill to bore into the surface of the asteroid and extract a sample. Due to the torque produced by the drill, the spacecraft must be anchored to the surface from which it is obtaining the sample.
Similar to the drill is the chipper which utilizes a pair of counter-rotated saws to dig into the surface and throw rock chips into collection vessels. This method has been considered for NASA’s Hera mission but was rejected due to unsatisfactory results under microgravity tests. The tests found that, when the saws came into contact with the surface, the surface tended to move away. In addition, the material ejected into the containers often swirled around and exited the container (10).
Like the drill, the Rock Abrasion Tool (RAT) could be used to grind a small area of the asteroid’s surface. By making the area small, the torque on the spacecraft could be kept to a minimum. Reaction wheels could also be used to counteract this force. This tool was used by NASA on its Mars Exploration Rovers. The RAT is small, 7 by 10 cm, weighs 685 g, and requires only 11 watts of electricity (6).
Corers would function on certain surfaces, but may be unsuccessful on harder surfaces. This method involves firing a small cylinder into the surface using an explosive charge. The cylinder is then retracted to retrieve the sample.
Other Methods
The sticky footpad consists of an arm, or a small array of arms, which contact the surface of the asteroid without the spacecraft touching down. The array of arms may be used to allow the craft to
7
tumble without touching the asteroid. Each arm has an adhesive pad to which samples would adhere. After collection the arms retract and the sample is stored in a container. The disadvantage to this method is that the sample will consist of material at the surface of the asteroid which has been changed over billions of years of exposure to solar radiation.
The use of an impactor simplifies the mission because it does not require the spacecraft to land on the asteroid. Instead, the spacecraft simply approaches the asteroid, fires a projectile, and flies through the debris cloud to retrieve a sample. The size, mass, and velocity of the projectile are variable and must be carefully considered. A small projectile will generate less debris, however a large projectile will produce a greater risk to the spacecraft due to the increase in size and mass of the debris cloud.
Some samples will be retrievable by small robotic claws that seal like clamshells when closed. This will require fine, granular material. Claws could be fired from a distance on cables, then reeled back into a spacecraft.
Requirements
The sample returned would ideally be of adequate mass to provide for multiple tests and to be distributed to multiple labs. This will allow for a variety of tests to be conducted as well as assuring that, by bringing in multiple scientists and labs, a range of expertise and techniques will be used. The collection process must not change the composition of the sample, the physical properties, or the particle size distribution.
The method of sample acquisition selected must be chosen based of the following:
Reliability – simple methods have the lowest likelihood of failure with fewer mechanical parts and systems
Versatility – the composition of the asteroid is unknown
Non-disruptive – the collection method cannot interfere the sample properties in any way which would affect the results of laboratory tests
Optimal method
The method most likely to provide adequate samples for missions with objectives such as those described is the RAT. By using the reaction wheels to counteract the torque produced by the tool it will not be necessary to anchor the spacecraft to the asteroid. This provides versatility as the composition and, therefore, ability to anchor to the asteroid, may be unknown. This also increases the chances of a viable sample being obtained. The method proposed for the Osiris-Rex mission has the potential to be simpler, with less machinery, and different dynamics, however, collecting a sample in that way relies on the craft not touching down on a rock or some portion of the surface without a layer of fine regolith to pick up.
8
Mission Outline
The methods and equations discussed are applicable to sample acquisition from a variety of objects. However, to provide a more detailed example, asteroid 101955 (1999 RQ36) is examined. This is an asteroid about which relatively little is known. Its orbit brings it on several close approaches to Earth and potentially impacts the Earth in the future. Sample acquisition from this asteroid begins with the spacecraft approach during which time it will gather data pertaining to mass, composition, velocity, and trajectory. Throughout this time the satellite will also map the asteroid to select the optimal landing site. As the spacecraft approaches the asteroid it will begin maneuvers to slow its descent and properly orient itself. After landing a sample will be collected using the RAT.
Asteroid Characteristics
RQ36 is an Apollo asteroid. This means that it has an Earth crossing orbit with a semi-major axis greater than 1 AU. The approximate orbit of an Apollo asteroid is shown in Figure 7. Table 1 lists the close approaches of RQ36 for the next 25 years.
Date Distance (AU) Vrel (km/s)
9-1-2017 0.336071 15.316022 5-15-2018 0.351882 6.7073476 8-25-2023 0.496768 19.968774 6-2-2024 0.359812 6.6153239 2-25-2025 0.39155 16.896397 6-21-2030 0.345906 6.1778701 2-18-2031 0.231499 12.018280 6-12-2036 0.31041 5.3969318 2-11-2037 0.098718 7.5346451
Figure 6: Doppler Images of RQ36 (1)
9
The known parameters of RQ36 are given in Tables 1 and 2 (8).
Value Uncertainty (𝟏𝝈) e 0.2036994928473318 3.411 ∗ 10−8 a 1.126038025838632 (AU) 1.2785 ∗ 10−10 𝒊 6.035405340360255 (deg) 4.3577 ∗ 10−6 𝛀 2.051615098784052 (deg) 5.6318 ∗ 10−6 𝝎 66.2666863129749 (deg) 6.4205 ∗ 10−6 𝑴𝟎 102.8657778912915 (deg) 3.6863 ∗ 10−6 n 0.824490695353057 (deg/d) 1.4048 ∗ 10−10 Orbital Period 436.443481606608 (days) 7.4329 ∗ 10−8 Velocity 27.8 (km/s) - Aphelion 1.355411400628771 (AU) 1.5389 ∗ 10−10 Perihelion 0.8966646510484917(AU) 3.8345 ∗ 10−8 Diameter 0.56 (km) Mass 1.4 *1011(kg)
Rotation Period 4.288 (hours) Gravitational Parameter 9.3422 ∗ 10−9 𝑘𝑚
3
𝑠2
Table 2:Physical Characteristics of RQ36 (8)
Table 3: Orbital Parameters of RQ36 (8) Figure 7: Orbit of Apollo Asteroids (5)
10
These orbital elements are defined as shown in Figure 8 (15).
Equations
The equations of motion for a spacecraft orbiting an asteroid are [15]:
𝑟 + 2𝜔 𝑇× 𝑟 + 𝜔 𝑇 × 𝜔 𝑇× 𝑟 = 𝜕𝑉 𝜕𝑟 𝑉 𝑟 =𝐺𝑀 𝑟 1 + 𝑎0 𝑟 𝑙 𝑃𝑙𝑚 𝑠𝑖𝑛𝜙 × 𝐶𝑙𝑚cos 𝑚𝜆 + 𝑆𝑙𝑚sin 𝑚𝜆 𝑚 𝑚 =0 ∞ 𝑙=2 = 𝑉0+ 𝑉𝑃 𝑉𝑃 = 𝐺𝑀𝑎02 𝑟3 ( 1 2𝐶20 3 sin 2𝜙 − 1) + 3𝐶 22cos2𝜙 cos 2𝜆 = 𝐺𝑀𝑎02 𝑟5 3𝐶22 𝑥2− 𝑦2 − 𝐶20 𝑥2+𝑦2−2𝑧2 2
These equations provide a starting point for orbit development. To simplify the equations it is assumed that the asteroid has a stable center point.
For a satellite orbiting an asteroid with a stable center point the characteristic roots of the equation of disturbance motion are [3]:
𝜆12 = 𝑏2− 4𝑐 12− 𝑏 2 1 2 = ±𝑑1𝑖, 𝑖 = −1 𝜆34 = − 𝑏2− 4𝑐 12 − 𝑏 2 1 2 = ±𝑑1𝑖, 𝑖 = −1
The first order analytic solution is then:
11
𝛼 = 𝐶𝑎cos 𝑑1𝑡 + 𝐶2sin 𝑑1𝑡 + 𝐶3cos 𝑑2𝑡 + 𝐶4sin 𝑑2𝑡
𝛽 = 𝜂1𝐶1sin(𝑑1𝑡 + 𝜂1𝐶2 𝑑1𝑡 + 𝜂2𝐶3sin 𝑑2𝑡 + 𝜂2𝐶4cos 𝑑2𝑡
𝐶5cos(𝑑3𝑡) + 𝐶6sin 𝑑3𝑡 Where: 𝜂1 = 𝑈𝑥𝑥0 − 𝑑12 2𝜔𝑇𝑑1 , 𝜂2= −𝑑22− 𝑈 𝑥𝑥0 2𝜔𝑇𝑑2
These equations satisfy the orbit of an asteroid however, given the size of RQ36, a better approach for this asteroid would simply be to follow it for some time and observe the asteroid en route. Once close enough to the asteroid to begin maneuvers for landing the equations outlined in Appendix A are used.
Future Work
A variety of steps could be taken to further this project. A simulation could be developed for landing, the landing could be optimized, the assumptions revised to provide for better numbers, control logic included, and a trajectory to and from the asteroid developed.
Conclusions
Though the basic equations were found, they remain unfinished. The reasons for sampling the asteroid are fully outlined, as are the different methods for obtaining these samples.
12
Appendix A
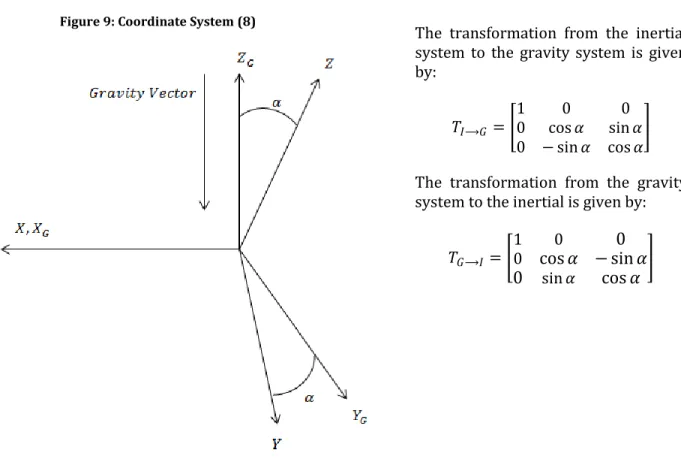
The following equations are taken from "A Mathematical Procedure for Predicting the Touchdown Dynamics of a Soft-Landing Vehicle" (17). Three coordinate systems are utilized to formulate the simulation of the touchdown dynamics. The first of these is the inertial coordinate system. This system is defined such that the x-y plane forms the surface the spacecraft will land on.
In the gravity coordinate system (𝑋𝐺, 𝑌𝐺, 𝑍𝐺) the 𝑋𝐺axis corresponds to the X axis of the inertial frame and the −𝑍𝐺axis corresponds to the gravity vector. The relationship between these two coordinate systems is shown in Figure 9.
The transformation from the inertial system to the gravity system is given by:
𝑇𝐼⟶𝐺 =
1 0 0 0 cos 𝛼 sin 𝛼 0 − sin 𝛼 cos 𝛼
The transformation from the gravity system to the inertial is given by:
𝑇𝐺⟶𝐼=
1 0
0
0
cos 𝛼 − sin 𝛼
0
sin 𝛼cos 𝛼
The body coordinate system is fixed with respect to the landing vehicle so that the origin corresponds to the vehicle center of mass. The body system is related to the inertial system though a set of Euler angles, (𝜃𝑥, 𝜃𝑦, 𝜃𝑧).
The transformation from the body system to the inertial system is:
𝑇𝐵⟶𝐼=
cos 𝜃𝑦cos 𝜃𝑧 − cos 𝜃𝑦sin 𝜃𝑧 sin 𝜃𝑦
sin 𝜃𝑥sin 𝜃𝑦cos 𝜃𝑧+ cos 𝜃𝑥sin 𝜃𝑧 sin 𝜃𝑥sin 𝜃𝑦sin 𝜃𝑧− cos 𝜃𝑥cos 𝜃𝑧 sin 𝜃𝑥cos 𝜃𝑦
cos 𝜃𝑥sin 𝜃𝑦cos 𝜃𝑧− sin 𝜃𝑥sin 𝜃𝑧 cos 𝜃𝑥sin 𝜃𝑦sin 𝜃𝑧+ sin 𝜃𝑥cos 𝜃𝑧 cos 𝜃𝑥cos 𝜃𝑦 The matrix which is used to relate the vehicle angular rate vector components from the body angular rates the Euler angular rate is:
13
𝑇𝐵⟶𝐸 = cos 𝜃𝑧 cos 𝜃𝑦 −sin 𝜃𝑧 cos 𝜃𝑦 0 sin 𝜃𝑧 cos 𝜃𝑧 0 −sin θy cos 𝜃𝑧 cos 𝜃𝑦 sin θy sin 𝜃𝑧 cos 𝜃𝑦 1From Euler angular rates to body angular rates is given by:
𝑇𝐸⟶𝐵 = [𝑇𝐵⟶𝐸]−1 =
cos 𝜃𝑦cos 𝜃𝑧 sin 𝜃𝑧 0
− cos 𝜃𝑦sin 𝜃𝑧 cos 𝜃𝑧 0
sin 𝜃𝑦 0 1 Therefore: 𝜃 𝑥 𝜃 𝑦 𝜃 𝑧 = [𝑇𝐵⟶𝐸] 𝜔𝑥 𝜔𝑦 𝜔𝑧
Where (𝜃 𝑥, 𝜃 𝑦, 𝜃 𝑧)are the Euler angular rate components and (𝜔𝑥, 𝜔𝑦, 𝜔𝑧) are the body angular rate components.
The time derivative of this equation yields the expression for time rate of change of the Euler components: 𝜃 𝑥 𝜃 𝑦 𝜃 𝑧 = [𝑇𝐵⟶𝐸] 𝜔 𝑥 𝜔 𝑦 𝜔 𝑧 + 𝑑 𝑑𝑡[𝑇𝐵⟶𝐸] 𝜔𝑥 𝜔𝑦 𝜔𝑧 Equations of Motion 𝑋 =𝐹𝑥 𝑀 + 𝑔𝑥 𝑌 =𝐹𝑦 𝑀 + 𝑔𝑦 𝑍 =𝐹𝑧 𝑀 + 𝑔𝑧
Euler moment equations for rigid bodies:
𝑇𝑥 = 𝐼𝑥𝑥 𝜔 𝑥 − 𝐼𝑥𝑦𝜔 𝑦− 𝐼𝑥𝑧𝜔 𝑧+ −𝐼𝑥𝑦𝜔𝑥 − 𝐼𝑦𝑧𝜔𝑦+ 𝐼𝑧𝑧𝜔𝑧 𝜔𝑦− −𝐼𝑥𝑦𝜔𝑥 + 𝐼𝑦𝑦𝜔𝑦− 𝐼𝑦𝑧𝜔𝑧 𝜔𝑧
𝑇𝑦 = −𝐼𝑥𝑦 𝜔 𝑥− 𝐼𝑦𝑦𝜔 𝑦 − 𝐼𝑦𝑧𝜔 𝑧+ −𝐼𝑥𝑥𝜔𝑥− 𝐼𝑥𝑧𝜔𝑦 + 𝐼𝑦𝑧𝜔𝑧 𝜔𝑧− −𝐼𝑥𝑧𝜔𝑥 + 𝐼𝑦𝑧𝜔𝑦− 𝐼𝑧𝑧𝜔𝑧 𝜔𝑦
14
Bibliography
[1] "1999 RQ36." Asteroid Radar Research. NASA JPL, 08 Dec. 2010. Web. 14 Apr. 2012. <http://echo.jpl.nasa.gov/~lance/1999RQ36/1999RQ36.html>.
[2] Barucci, M. A.; Yoshikawa, M.; Michel, P.; Kawagushi, J.; Yano, H.; Brucato, J. R.; Franchi, I. A.; Dotto, E.; Fulchignoni, M.; Ulamec, S., “Marco Polo: Near Earth Object Sample Return
Mission,” Experimental Astronomy, Volume 23, Issue 3, pp.785-808
[3] Brandt, Niel. "Astro 1: `Slides' for Class 43 - The Formation of the Sun and Planets." Astro 1: Slides for Class 43. Pennsylvania State University. Web. 10 Apr. 2012.
<http://www2.astro.psu.edu/users/niel/astro1/slideshows/class43/slides-43.html>. [4] Choi, Charles Q. "1st Asteroid Samples Reveal Surprising Look at Space Rock Crashes."
Space.com. 27 Feb. 2012. Web. 14 Apr. 2012. <http://www.space.com/14691-asteroid-impacts-hayabusa-meteorite-samples.html>.
[5]
"Dawn Mission: Dawn - Home Page."
Dawn Mission: Dawn
. JPL. Web. 1 Apr. 2012.
<http://dawn.jpl.nasa.gov/>.
[6]
"ESA Selects Targets for Asteroid-deflecting Mission Don Quijote."
Space Spin -
.
Spacespin, 26 Sept. 2005. Web. 17 Apr. 2012.
<http://spacespin.org/article.php/esa_selects_target_asteroid_don_quijote>.
[7] "Honeybee Robotics Spacecraft Mechanisms Corporation." HoneybeeRobotics.com.Honeybee Robotics. Web. 14 Apr. 2012.
<http://www.honeybeerobotics.com/index.php?option=com_content>.
[8] "JPL Small-Body Database Browser." JPL Solar System Dynamics. Jet Propulsion Laboratory, 26 Oct. 2005. Web. 11 Feb. 2012. <http://ssd.jpl.nasa.gov/sbdb.cgi?sstr=101955;orb=1>. [9] Kubota, T.; Otsuki, M.; Hashimoto, T.; , "Touchdown dynamics for sample collection in
Hayabusa mission," Robotics and Automation, 2008. ICRA 2008. IEEE International
Conference on , vol., no., pp.158-163, 19-23 May 2008 doi: 10.1109/ROBOT.2008.4543202 [10] Sears, Derek, Carl Allen, Dan Britt, Don Brownlee, Melissa Franzen, Leon Gefert, Stephen
Gorovan, Carle Pieters, Jeffrey Preble, Dan Scheeres, and Ed Scott. "The Hera Mission: Multiple Near-earth Asteroid Sample Return." Http://www.planetary.brown.edu/. Brown University Planetary Geosciences Group, 19 May 2003. Web. 16 Feb. 2012.
<http://www.planetary.brown.edu/pdfs/3249.pdf>.
[11] Sears, D. WG, C. C. Allen, M. S. Bell, D. Bogard, D. Britt, D. E. Brownlee, C. Chapman, B. C. Clark, R. Dissley, M. A. Franzen, J. Goldstein, K. Nishiizumi, L. Nyquist, C. M. Pieters, D. Scheeres, E. RD Scott, and A. Treiman. "The Hera Near-Earth Asteroid Sample Return Mission: Science Requirements of the Sample Collector." Http://www.planetary.brown.edu. Brown University Planetary Geosciences Group, 19 May 2003. Web. 16 Feb. 2012.
<http://www.planetary.brown.edu/pdfs/3248.pdf>.
[12] "Rock Abrasion Tool (RAT)." Cornell, 08 July 2002. Web. 12 Mar. 2012. <http://athena.cornell.edu/pdf/tb_rat.pdf>.
15
[13] Takashi Kubota, Tatsuaki Hashimoto, ShujiroSawai, Jun'ichiro Kawaguchi,
KeikenNinomiya, MashashiUo, Kenichi Baba, An autonomous navigation and guidance system for MUSES-C asteroid landing, ActaAstronautica, Volume 52, Issues 2–6, January– March 2003, Pages 125-131, ISSN 0094-5765, 10.1016/S0094-5765(02)00147-9. [14] Takashi Kubota, Tatsuaki Hashimoto, ShujiroSawai, Jun'ichiro Kawaguchi,
KeikenNinomiya, MashashiUo, Kenichi Baba, An autonomous navigation and guidance system for MUSES-C asteroid landing, ActaAstronautica, Volume 52, Issues 2–6, January– March 2003, Pages 125-131, ISSN 0094-5765, 10.1016/S0094-5765(02)00147-9. [15] Wie, Dr. Bong. "AerE 464: Spacecraft Systems Introduction 1." 2012.
[16] Zhang Zhenjiang; Cui Hutao; , "Orbit dynamics and control in the neighborhood of the asteroid's center point," Systems and Control in Aeronautics and Astronautics (ISSCAA), 2010 3rd International Symposium on , vol., no., pp.604-609, 8-10 June 2010 doi: 10.1109/ISSCAA.2010.5632870
[17]
Zupp Jr., George A., and Harold H. Doiron. "A Mathematical Procedure for Predicting
the Touchdown Dynamics of a Soft-Landing Vehicle."
Nasa.gov
. NASA, Feb. 1971.
Web. 12 Mar. 2012.