Physical Modelling, Simulation and Experimental
Analysis for Synchronizing Multiple Hydraulic
Actuators
Olayinka Mohammed Olabanji, Khumbulani Mpofu
Abstract-- This paper focuses on theoretical design and experimental investigation of multiple hydraulic actuators used for precise positioning of elements in a reconfigurable assembly fixture. Design analysis of the hydraulic system is achieved by deriving mathematical models of the components. A physical model of the hydraulic system was developed in SimHydraulics using Matlab-Simulink. The developed model was parameterized using the result obtained from the design analysis. The responses of the actuators were obtained for different input signals at the directional control valves. Experiment was carried out on an electrohydraulic test bench in order to observe the performance of the system, and confirm the synchronized extension and retraction of the actuators. Results obtained from the simulation and experiment are presented graphically and discussed extensively.
Index Term-- Hydraulic actuators, Position synchronization, Electrohydraulic System, Physical Modelling and Simulation 1. INTRODUCTION
Industrial machineries such as reconfigurable assembly fixtures (RAFs), manufacturing and laboratory test equipment, robots, automobile and aeronautical equipment requires the use of hydraulic actuators. The core reason for the application of hydraulic actuator is the production of high force compare to the overall weight of the system [1]. Another advantage is high precision control of variable speed, force and displacement [2, 3]. Hydraulic actuators play an important role in an electrohydraulic system [4, 5]. They convert the fluid energy obtained from the pumping system through the electrohydraulic valve, and allow flexibilities in operations [6, 7]. The electrohydraulic valve can be a proportional control valve or a directional control valve. Most applications involving multiple actuators requires effective synchronization [8]. Basically, there are three approaches to achieve synchronization of multiple hydraulic actuators. These approaches are, the use of flow dividers circuit, mechanical connection of the actuators by linkage design and electrohydraulic synchronization [9]. In literature, electrohydraulic systems comprising of multiple hydraulic actuators uses several proportional control valves or flow dividers to ensure that the displacement of the actuators are synchronized [10, 11]. The use of several proportional control valves is not cost effective and it is tedious during the automation and valve sequencing. Despite the fact that the electrohydraulic system produce high force, controllable speeds, force and displacement, they still have some intrinsic non-linear effects which make it difficult to control them. They are properly modelled to ensure that the output response
is similar to the actual input or desired action [12, 13]. In essence the research on synchronization of multiple hydraulic actuators has focused on the use of several flow dividers and multiple proportional control valves for each of the actuators in the system (Vasiliu et al., 2004). In this paper, we will consider the synchronization of multiple hydraulic actuators using a directional control valve, three way flow control valves, and pressure reducing valves. The rest of the paper is structured as follows. In the next section, a brief description of the RAF using the electrohydraulic system is presented. In section three, model equations for the components of the hydraulic system is obtained. In section four, a physical model of the electrohydraulic system is developed in Simulink (Simscape-SimHydraulics) and the simulation results are presented graphically in section 5. In section six the experimental set up for the electrohydraulic system is presented with the results obtained from the experiment. Finally conclusions are made based on the results obtained. An Introduction should provide a review of the recent literature on the topic and sufficient background information to allow the results of the article to be understood and evaluated.
2. DESCRIPTION OF THE RAF
Fig. 1. Pictorial View of the RAF
3. MODEL EQUATIONS FOR COMPONENTS OF THE HYDRAULIC SYSTEM
In order to obtain a physical model of the electrohydraulic system it is necessary to derive the mathematical model of the components in the system. The parameters of the system considered in the formulation are: the pressure in each hydraulic subsystem, volumetric flow rate of pump, valve spool equation, valve coefficients and gains and the damping force due to transient flow. Other parameters considered are: the net force on the piston, the diameter of the actuator and piston rod, the resistive force and leakage flow coefficient, the elastic load stiffness and coefficient of viscous friction. Also, the mean flow rate of hydraulic fluid into the actuators and the acceleration of the piston were also obtained. The directional control valves are sized in order to obtain effective performance. The model equations are used separately for each subsystem. However the values of the parameters in the model differs for each subsystem. The pressure in each subsystem is a function of the total dynamic column, and the inlet pressures of the actuators. The total dynamic column can be obtained from the static discharge column of the piping system, discharge column diameter, head loss and velocity head in the discharge column [15-18]. The pressures in subsystems one and two can be deduced in equations 1 and 2 respectively.
1 n=4 1 1 n n=1 PI FC dc sc f dc c
ρgS +
1 P =
d 4C S + d P - P
(1)
2 i=2 2 2 i i=1 PI MFC dc sc f dc c
ρgS +
1
P =
d 4C S + d P - P
(2)
The volumetric flow rate of hydraulic fluid from the pump to all the actuators in the system can be deduced in equation 3. It depends on the power input to the pump and drive efficiency. It is also a function of the total dynamic column
in each subsystem and the specific gravity of the hydraulic fluid [19-21].
1 2
d in g p tc tc 0.1γ P Q =
D + D S
(3)
The displacement of the spool is initiated by an electromagnetic force created by the solenoid [22, 23]. This electromagnetic force depends on rate of change of inductance with respect to spool displacement and current through the solenoid. The current flowing through the coil is also a function of the applied voltage. Furthermore, the current is a function of resistance and inductance of the coil. The inductance depends on the spool position of the valve. The spool of the valve is driven by the plunger of the solenoid. This force must be able to overcome the mass of the spool, force spring rate of the spool and the damping coefficient due to transient flow force. If subsystems one and two are denoted with subscript 1 and 2, then the equation of motion of the valve spool force can be expressed from Newton’s second law as; [24-26].
s s
s
s=1,2 s s s
2
sp sp 2 ct sr
d U dU
F = M + d + U F
dt dt
(4)
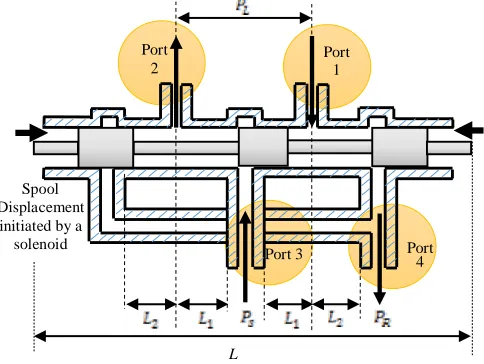
The damping coefficient due to transient flow force is also deduced in terms of the pressure requirements of the actuators in the subsystems and the valve symmetry as shown in Fig 3.
0.5 l 1 2
n=4 1
1 n
n=1
s s ct 2 1 d
s FC
ρ P + P
-d = L - L C w
P - P
(5)
0.5 l 1 2i=2 2
2 i
i=1
s s ct 2 1 d
s MFC
ρ P + P
-d = L - L C w
P - P
(6)
As the spool is displaced, a net pressure is created. This net pressure must overcome the inertia of the pistons in each actuators of the subsystems. In order to obtain a synchronized displacement the effect of this net pressure is uniformly distributed by the three way flow control valves and pressure reducing valve which is proposed in this article [26, 27]. The directional control valves are considered as a matched and symmetrical valve as shown in Fig 3. In order to supply hydraulic fluid to the actuators, it is necessary to determine the valve flow coefficient (VFC), valve gain (Vg) and pressure coefficient (PC) in terms of the actuator requirements and the flow rate in each subsystem [7]. Using subscripts one and two for subsystems one and two respectively, the valve flow coefficient, valve gain and pressure coefficient of the directional control valves can be deduced in equations 7-12.
FC Fingers
Fig. 2. Schematic Diagram of the RAF showing all Hydraulic components
0.5 -1 n=4 11 1 n
n=1 p
r
FC g s FC
F
V = S P - P
NF
(7)
0.5 -1 i=2 22 2 i
i=1 p
r
FC g s MFC
F
V = S P - P
NF
(8)
*
0.5 n=4
1 1 2 1 n
n=1 l
d
s s s FC
g
πLC 1
V = P + P - P - P
6 ρ
(9)
*
0.5 i=2
2 1 2 2 i
i=1 l
d
s s s MFC
g
πLC 1
V = P + P - P - P
6 ρ (10)
* -0.5 n=4 21 1 2 1 n
n=1
C FC
l
s s s
πLCd
P = P + P - P - P
12ρ
(11)
* -0.5 i=2 22 1 2 2 i
i=1
C MFC
l
s s s
πLCd
P = P + P - P - P
12ρ
(12)
The diameter of the actuator is a function of the external load pushed, the pressure in the system and the pressure developed in the actuator due to the movement of the piston. It is expected that the pressure in each subsystem will be uniformly distributed into all identical actuator in the system. This will be achieved by the pressure reducing valves controlling each of the actuator. Again, if subscript one and two is used to represent subsystems one and two, then the diameter of each actuator in subsystems one and two can be expressed by equation 13;
0.5 s s s=1,2 s s act act act s 4F d =π P + P
(13) Furthermore, the net force on the piston is a summation of acceleration force, stiffness force and force due to viscous friction. The acceleration force on the piston is a function of
Pressure
reducing valve control valve 3 way Flow
the external load pushed. In order to obtain perfect synchronization, the load pushed by identical actuators in any subsystem must be equal. The diameter of the piston rod is a function of the external load pushed, diameter of piston, and the free buckling length of the piston rod at full extension considering the type of mounting arrangement. In essence the piston rod diameter of the actuators in the subsystems is deduced in equation 14;
-1 2 s s s s=1,2 s fb cpr s act
act
L
d
= 4F F
πσ 1- a
d
(14)
The leakage flow coefficient is deduced from the volumetric flow rate of hydraulic fluid entering the actuator and the pressure in the subsystem. The volumetric flow rate of hydraulic fluid entering and leaving each identical actuator is controlled by the three way flow control valves in order to obtain synchronization. Equations 15 and 16 presents the leakage flow coefficient for each hydraulic actuator in subsystems one and two respectively [28].
Fig. 3. Schematic diagram of the directional control valves
FC 1 1
1
1 P e Lf
s FC
Q - A V
C =
P - P
MFC 2 2
2
2 P e
Lf
s MFC
Q - A V
C =
P - P
The resistive force due to viscous friction is a function of the viscous friction coefficient and the velocity of the piston. It is linearly proportional to the velocity and contact area of the piston, and inversely proportional to the clearance between the piston and the cylinder wall
y
cl. The force produced by the piston must overcome this resistive force in order to achieve motion in the actuator [29]. This resistive force can be represented by equation 17. The total coefficient ofviscous friction of each actuator can also be obtained from equation 18; [30].
l l s
s s s=1,2 s act e res cl υ ρ A V
F = y
Fress
Ves
l l s s s=1,2 s act v cl υ ρ Ab =
y
The elastic load stiffness of the actuator is an important factor in the dynamic performance of the actuator. It depends on the volume of hydraulic oil in the hoses connected to the piston
n n=4 n n=1 n 1 n 1 FC FC 1 O np
T n p X
AP +
t Q =
V P
+ K P
2β t
(20) i i=2 i i=1 i 2 i 2 MFC MFC 2 O np T np XAP +
t Q =
V P
+ K P
2β t
(21)Furthermore, since it is expected that the dimensions (such as area, volume and travel length), displacement, viscous friction and acceleration force of all identical actuators are uniform, then the total supply from the directional control valve will be an equal distributive portion of individual actuator in a particular subsystem through the three way flow control valve and pressure reducing valves. In order for the piston of the actuators to translate, the net force on it must be greater than the summation of the acceleration force, viscous friction and the stiffness force. This net force is a function of the piston area and the differential pressure across the ports of the actuators. Since the aim of this modelling is to synchronize the position of the actuators, then the acceleration of the pistons will be obtained from the net force acting on the piston as presented in the dynamic equations 22 and 23 [32].
1 2 n n 2 n
n=1-4 1 n
np FC FC FC F le FC
AP P
-X 1
=
X M
t
bv - K X
t
(22) L Spool Displacementinitiated by a solenoid
Port 3 Port 4
Port 1 Port
2 2 i i 2 i
i=1-2 2 i
np MFC MFC MFC MF le MFC
AP P
-X 1
=
X M
t
bv - K X
t
(23)4 PHYSICAL MODELLING AND SIMULATION OF THE HYDRAULIC SYSTEM
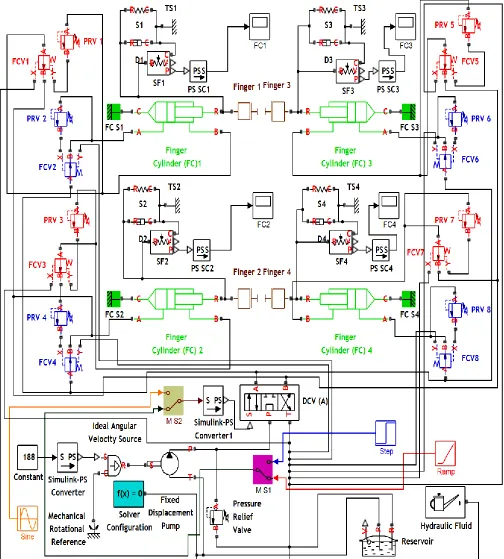
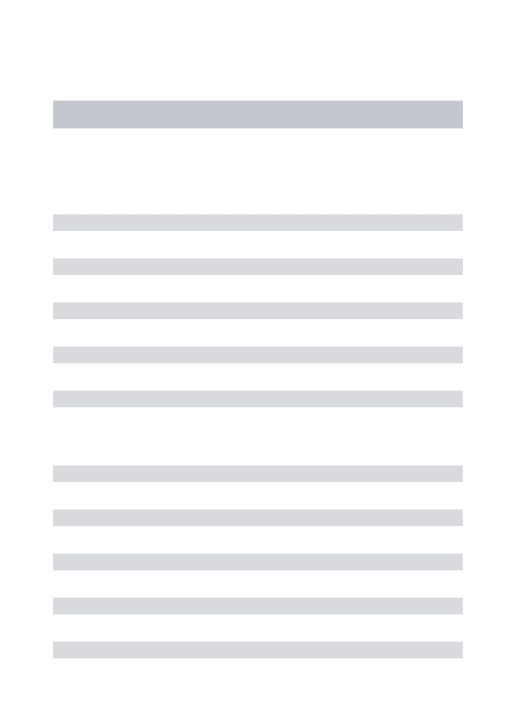
A physical model of the two subsystems is developed using SimHydraulics in the Matlab-Simulink environment, as presented in Figs 4 and 5. The aim of the simulation is to obtain the response of the actuators and synchronize their outputs. Synchronization is achieved when all identical actuators have equal output response using different source signals at the directional control valves. The parameters of the components obtained from design analysis and model equations was inputted into the SIMSCAPE model in order to obtain the response of the actuators. The parameters used for simulation is presented in Table I. Furthermore, the simulation will assist in judging the synchronization of identical actuators, since the retraction and extension of the actuators is a function of the valve spool displacement [33, 34]. In essence, the solenoids of the directional control valves will be subjected to various source inputs such as step, sine and ramp. It is expected that the scope of the actuators will be in form of the input at the directional control valves [35, 36]. Considering Fig 4, the fluid leaving the directional control valves enters into the flow control valves. The flow control valves regulates the amount of fluid entering the piston side and annulus side of the actuators. The pressure reducing valves ensures that the induced differential pressure from the directional control valves is uniformly distributed among identical actuators in each subsystem. This implies that the flow and pressure of the fluid entering and leaving each identical actuator are supplied by several ports that are controlled to operate at equal state thereby giving a perfect synchronization [9, 10]. The 3-way flow control valve ensures that the same amount of fluid enters and leaves each identical actuator. Each of the 3-way flow control valve uses one pressure reducing valve. These pressure reducing valves also regulate the pressure of the hydraulic fluid entering and leaving each identical actuator. This is necessary in order to obtain a synchronized clamping force.
Furthermore, the function of the 3 way flow control valve in the hydraulic system is to ensure that the flow rate of hydraulic fluid supplied to the actuators is constant, and equal to the flow supplied to other identical actuator in the same subsystem. As the fluid leaves the flow control valves, its pressure is also kept constant by the pressure regulating valves. This is necessary because, it will ensure that the actuators are filled with hydraulic oil at the same rate thereby producing synchronization and equivalent gripping force of all identical actuators. The same situation holds for the
movable frame cylinders in subsystem two as shown in Fig 5.
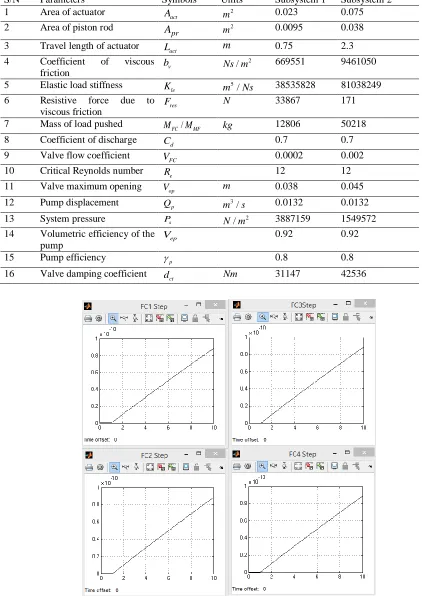
5 SIMULATION RESULTS AND DISCUSSION The results obtained from the simulation are presented in this section of the article. The results of the simulation are the responses of the actuators to different inputs at the directional control valves in each of the subsystem. The response of the actuators in subsystem one to ramp, step, and sine inputs are presented in Fig 6. Similarly, the response of the actuators in subsystem two to sine, step, and ramp inputs are presented in Fig. 7. Considering Figs. 6 and 7, it is evident that the response of identical actuators in each subsystem are equivalent irrespective of the type of source input at the directional control valve compared to the response of the actuators obtained from the use of flow dividers. The output response of the actuators are not perfectly synchronized when flow dividers are used particularly for a step response and large number of actuators [1]. Further, the simulation approach used in this paper yield responses for individual actuators in the subsystem compared to the use of FluidSim simulation [10]. The exactness of the graphical response of all identical actuators denotes that the actuators are synchronized [11]. Hence, it can be hypothetically stated that synchronization is achieved with the use of three way flow control valve and pressure reducing valve. The implication of subjecting the system to a ramp input is to obtain the linear response of the actuators with respect to a linear displacement of the spool in the directional control valve. It is expected that there should be a linear relationship between the spool displacement of the directional control valve and the synchronized extension of all the identical actuators in a subsystem.
In Fig 6, subsystem one is subjected to a unit ramp, and the actuators responds linearly to the input at the rate of 2.5*10 -14m in 10s. This implies that the actuators will extend or
retract synchronously and linearly within ten seconds of applying the input. The actuators in subsystem two responds linearly to a unit ramp at the rate of 4.9*10-16m in 10s. This
implies that subsystem one attains linear state faster than subsystem two, because the displacement covered in 10s is greater than that of subsystem two. More also, the implication of subjecting the system to a step input is to obtain the response of the actuators to a change of state in the spool position of the directional control valves. It is anticipated that, there will be a change of state of the actuators for an infinitesimal displacement of the spool. Considering Fig 6, when subsystem one is subjected to a unit step input, there is an indication that the actuators will change state (start to extend or retract) linearly for a displacement of 2.25*10-14m
of the spool. Actuators in subsystem two change state linearly for a displacement of 4.5*10-16m by the spool. Additionally,
Table I
System Parameters used for modelling
(a) Step input
S/N Parameters Symbols Units Subsystem 1 Subsystem 2
1 Area of actuator Aact 2
m 0.023 0.075
2 Area of piston rod
pr
A 2
m 0.0095 0.038
3 Travel length of actuator Lact m 0.75 2.3
4 Coefficient of viscous
friction v
b 2
/
Ns m 669551 9461050
5 Elastic load stiffness Kle 5
/
m Ns 38535828 81038249
6 Resistive force due to
viscous friction res
F N 33867 171
7 Mass of load pushed MFC/MMF kg 12806 50218
8 Coefficient of discharge Cd 0.7 0.7
9 Valve flow coefficient VFC 0.0002 0.002
10 Critical Reynolds number Re 12 12
11 Valve maximum opening Vop m 0.038 0.045
12 Pump displacement Qp 3
/
m s 0.0132 0.0132
13 System pressure Ps N m/ 2 3887159 1549572
14 Volumetric efficiency of the
pump ep
V 0.92 0.92
15 Pump efficiency p 0.8 0.8
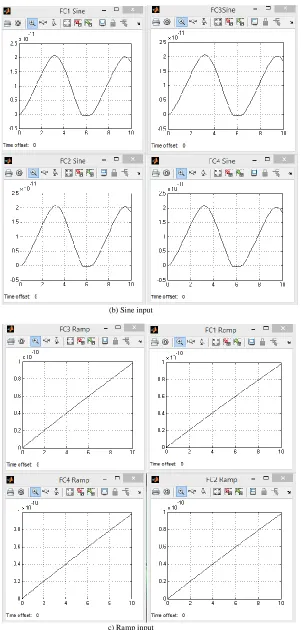
(b) Sine input
c) Ramp input
Fig. 7. Actuator responses of hydraulic subsystem two to sine, step and ramp input at the directional control valve
Also, it is clear from Fig 6 that, when the directional control valve in subsystem one is subjected to a sine input, it is observed that the actuators took 3secs to extend to a displacement of 2*10-11m. This implies that the actuators will
respond to the spool displacement of the valve after 3secs, thus extending or retracting synchronously. Also, when the directional control valve in subsystem two is subjected to a sine input (Fig 7), it is observed that the actuators took 3.5secs to extend to a displacement of 1.18*10-11m. This
implies that the actuators will respond to the spool
displacement of the valve after 3.5secs, thus extending or retracting synchronously.
6 EXPERIMENTAL INVESTIGATION, RESULTS AND DISCUSSION
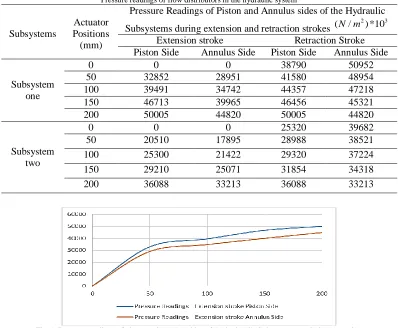
position of the actuators. The experiment was initially carried out in order to ensure that the flow control valves produces synchronized extension and retraction of the actuators. At complete extensions of the actuators the piston rod was cleaned in order to create notable spots (to represents actuator positions 50mm, 100mm, 150mm 200mm). The hose supplying fluid to the piston and annulus ports of the actuators was disengaged in order to force the retraction of the piston rod into the actuators, and ensure that there is no fluid in the actuators. The hydraulic system was reconnected and the pressure readings of the flow distributor in the annulus and piston sides of the system during extension and retraction strokes were noted. The pressure readings of the flow distributor in the annulus and piston sides of the system during extension and retraction stroke are presented and discussed in this section. As stated earlier, the piston rods of the actuators are pushed back into the actuator after confirming their synchronized extensions and retractions, hence there will be no fluid in the actuators before the first extension stroke and as such the pressure readings of the flow distributors are all zero. It is clear from Fig. 9 to Fig. 12 that the maximum pressure occurs at the maximum extension of the actuators. Furthermore, the pressure readings of the flow distributors at maximum extension is equal to that of the minimum retractions because retraction begins at maximum extension in the experiment. The pressure readings of the flow distributor during the extension and retraction
of the finger actuators differs from that of the movable frame actuators as presented clearly in Fig. 9 to Fig. 12. The difference in pressure is because the number of actuators controlled in subsystem one are more than the number of actuators controlled in subsystem two. It is expected that the three way flow control valves will ensure that an equal amount of fluid enters and leaves all identical actuator thereby making it possible to achieve synchronization. Furthermore, the differences in response time and displacement of the actuators observed in the simulation for the two subsystems is because the volume of oil under compression in the piston sides of the actuators in each subsystems are different. This difference can also be linked to the pressure readings of the two subsystems in the piston and annulus sides of the hydraulic system as presented in Table II. It is evident that the subsystem with high pressure responds faster by covering a notable distance in a small time. The pressure in the piston side of the system is lesser than the annulus side during the retraction stroke and higher during the extension stroke due to the varying volume of oil under compression in the ports as seen in Figs 9 to 12. In addition, it can also be observed that the pressure reading of subsystem one is higher than that of subsystem two due to large number of ports under compression in the subsystem. In view of this, it can be hypothetically stated that larger volume of oil under compression can be attributed to high pressure in the system.
Table II
Pressure readings of flow distributors in the hydraulic system
Subsystems
Actuator Positions (mm)
Pressure Readings of Piston and Annulus sides of the Hydraulic Subsystems during extension and retraction strokes
2 3
(N m/ ) *10
Extension stroke Retraction Stroke
Piston Side Annulus Side Piston Side Annulus Side
Subsystem one
0 0 0 38790 50952
50 32852 28951 41580 48954
100 39491 34742 44357 47218
150 46713 39965 46456 45321
200 50005 44820 50005 44820
Subsystem two
0 0 0 25320 39682
50 20510 17895 28988 38521
100 25300 21422 29320 37224
150 29210 25071 31854 34318
200 36088 33213 36088 33213
Fig. 9. Pressure readings of piston and annulus sides of the hydraulic Subsystem one during extension
Fig. 10. Pressure readings of piston and annulus sides of the hydraulic Subsystem one during retraction
Fig. 12. Pressure readings of piston and annulus sides of the hydraulic Subsystem two during retraction
7 CONCLUSION
The performance of hydraulic actuators as clamping elements for a fixturing device depends on effective synchronization. An innovative approach to position synchronization of multiple hydraulic actuator have been achieved using directional control valves, pressure reducing valves and flow control valves. The approach have been tested by simulation and experiment. The model for the electrohydraulic subsystems are simulated using Simscape hydraulics. The results of the simulation have been confirmed with the experimental test carried out on the FESTO didatic hydraulic test bench. The exactness of the graphical results obtained for all identical actuators in the same hydraulic subsystem also depicts that the actuators are perfectly synchronized. However future work needs to be
considered in the aspect of synchronizing the clamping force and designing an effective controller for the electrohydraulic systems. This is necessary, in order to obtain uniform gripping force of the reconfigurable assembly fixture. To this end, it can be stated that the contributions of this article can be seen from the Synchronization of multiple hydraulic actuator using a directional control valve, three way flow control valves and pressure reducing valves. Experimental validation of the designed electrohydraulic system on an electrohydraulic test bench and physical modelling and simulation of the electrohydraulic system in Simscape SimHydraulics in order to obtain the system response to various inputs at the directional control valve.
8 NOMENCLATURES
1 2
P and Ps s
[N/m2] pressures in the subsystems for subsystems one and two respectively
P and PFC MFC
[N/m2] inlet pressures of the actuators for subsystems one and two respectively
1 2
Sdc and Sdc [m] static discharge column for subsystems one and two respectively c
d [m] discharge column diameter
f
C
coefficient of friction of the column wall
PI P
[N/m2] pressure of the hydraulic fluid at the pump inlet
n and i number of actuators in subsystem one and two respectively.
Qp
[m3/s] volumetric flow rate of hydraulic fluid from the pump
Sg
specific gravity of the hydraulic fluid
Pin [W] power input to the pump
d
drive efficiency
1 and 2
tc tc
D D
[m] total dynamic column of subsystem one and two respectively
s U
[m] displacement of spool
sp M
[kg] mass of spool sr
F
[N/m] foce spring rate sp
F
[N] valve spool force cts
d
d
C coefficient of discharge
w [m2] area gradient of spool
l
[kg/m3] density of the hydraulic fluidN numerical constant based on unit factor
p
F
numerical constant based on pipe geometry factor
r1 r2
F and F [m3/s] volumetric flow rate of hydraulic fluid in subsystems one and two respectively
act
d
[m] diameter of the actuator
act
F [N] external load pushed by the actuator
Ps [N/m2] pressure in the hydraulic system
act
P
[N/m2] pressure developed in the actuator
c
[N/ m2] crushing stress
a Rankine’s constant
s
F
factor of safety
pr
d
[m] diameter of the piston rod.
fb
L [m] free buckling length of the piston rod
PFC PMFC
A and A
[m2] areas of the pistons in the finger and movable frame cylinders respectively
e1 e2
V and V [m/s] velocities of the piston in the finger and movable frame cylinders during extension respectively
Lf1 Lf2
C and C leakage flow coefficients for identical actuators in subsystems one and two respectively Q [m3/s ] volumetric flow rate of hydraulic fluid entering the actuator.
res
F [N] resistive force due to viscous friction
v
b
viscous friction coefficient
es
V
[m/s] velocity of the piston in each subsystems
l
[m2/s] kinematic viscosity of the hydraulic fluid
act
A [m2] area of the actuator
cl
y [m] clearance between the piston and cylinder wall
le
k
[N] elastic load stiffness of the actuator
n
A
[m2] annulus area of the actuator
[N/m2] bulk modulus of the oil
L1 L2
V and V [m3] volume of hydraulic oil in the hoses connected to the piston and annulus side respectively
1 2
V and V
[m3] total volumes of hydraulic oil in the actuators before displacement.
On Oi
V and V
[m3] initial volumes of hydraulic oil in the actuators in subsystems one and two respectively
np1 np2
P and P
[N/m2] differential pressures across the ports of the valves in subsystem one and two respectively.
Tn Ti
K and K [m3] total leakage flows for each actuators in subsystem one and two respectively.
1 2
Q and Q
[m3/s] mean flow rate of subsystem one and two respectively
FCn MFCi
X and X
[m] displacements of the actuators in subsystem one and two respectively
F MF
9 REFERENCES
[1] Olabanji, O., K. Mpofu, and B. Olga, Design, simulation and experimental investigation of a novel reconfigurable assembly fixture for press brakes. International Journal of Advance Manufacturing and Technology Springer, 2015. DOI 10.1007/s00170-015-7341-6: p. 1-17.
[2] Guan, C. and S. Pan, Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Engineering Practice, 2008. 16(11): p. 1275-1284.
[3] Földi, L., Z. Béres, and E. Sárközi, Novel cylinder positioning system realised by using solenoid valves. Sustainable Construction and Design, 2011. 2(1): p. 142-151.
[4] Shailaja, K., G.D. Prasad, and S. Ashpana. Modeling of electro-hydraulic servo valve and Robust Position Control using Sliding Mode Technique. in Proceedings of the 1st International and 16th National Conference on Machines and Mechanisms (iNaCoMM2013): . 2013. IIT Roorkee, India.
[5] Has, Z., et al., Robust position tracking control of an electro-hydraulic actuator in the presence of friction and internal leakage. Arabian Journal for Science and Engineering, 2014. 39(4): p. 2965-2978.
[6] Zhao, J., J. Wang, and S. Wang, Fractional order control to the electro-hydraulic system in insulator fatigue test device.
Mechatronics, 2013. 23(7): p. 828-839.
[7] Zhao, C., et al. Control of electro-hydraulic servo system for a material test system using fuzzy nerual network. in Intelligent Control and Automation, 2008. WCICA 2008. 7th World Congress on. 2008. IEEE.
[8] Olabanji, O.M., Development of a Reconfigurable Assembly System for the Assembly of Press Brakes. 2015, Tshwane University of Technology.
[9] Sun, H. and G.-C. Chiu. Motion synchronization for multi-cylinder electro-hydraulic system. in Advanced Intelligent Mechatronics, 2001. Proceedings. 2001 IEEE/ASME International Conference on. 2001. IEEE.
[10] Adenuga, O.T. and K. Mpofu, Control system for electro-hydraulic synchronization on RBPT. Procedia CIRP, 2014. 17: p. 835-840.
[11] Grzybek, D. and P. Micek, Control system of the hydraulic cylinders synchronization with the use of arithmetic mean of their positions. Mechanics and Control, 2010. 29: p. 16-21.
[12] Ziaei, K. and N. Sepehri, Modeling and identification of electrohydraulic servos. Mechatronics, 2000. 10(7): p. 761-772. [13] Rahmat, M.F.a., et al., Modeling and controller design of an
electro-hydraulic actuator system. American Journal of Applied Sciences, 2010. 7(8): p. 1100-1108.
[14] Olabanji, O. and K. Mpofu, Comparison of Weighted Decision Matrix, and Analytical Hierarchy Process for CAD Design of Reconfigurable Assembly Fixture. Procedia CIRP, 2014. 23: p. 264-269.
[15] Barbara, A.H., Practical Hydraulics Handbook: Second Edition. 1996, Printed in the United States of America, CRC Press Inc, 2000 Coperate Blvd, N W Boca Raton, Florida, 33431: CRC Lewis Publishers, An Imprint of CRC Press; ISBN: 1-56670-038-8: 357: Pg: 1-41; 43-63; 121-159.
[16] Ranald, V.G., B.E. Jack, and L. Cheng, Schaums outline of Theory and Problems of Fluid Mechanics and Hydraulics: Third Edition. 1996, Printed in the United States of America, McGraw-Hill Inc.: Schaums Outline Series McGraw-McGraw-Hill New York: ISBN 0-07-02509-4; 375: 13-33; 102-136; 138-164; 242-270; 312-330. [17] Long, Q., Current state, problems and the innovative solution of electro-hydraulic technology of pump controlled cylinder [J].
Chinese Journal of Mechanical Engineering, 2008. 44(11): p. 87-92.
[18] Vasiliu, N., et al., Digital control systems for synchronizing hydraulic servo cylinders. Scientific Bulletin of the Politehnica University of Timisoara Transactions on Mechanics, 2004: p. 411-416.
[19] Rex, M., R.M. Mark, and S. Harry, Pumps and Hydraulics. 2004, Published simultaneously in Canada, Printed in the United States
of America: Wiley Publishing, Inc., Indianapolis, Indiana: eISBN: 0-7645-7911-8: 556: 65-84: 113-297; 317-467;473-482. [20] Andrew, P., Hydraulics and Pneumatics: A technician's and engineer's guide; Third edition. 2011, Linacre House, Jordan Hill, Oxford OX2 8DP, UK: 30 Corporate Drive, Suite 400, Burlington, MA 01803, USA: Butterworth-Heinemann; An imprint of Elsevier: ISBN-13:978-0-7506-4419-9: 239: 1-31; 33-50; 84-100; 117-160; 167-183.
[21] LI, Z.-f. and Z.-c. ZHAO, Multi-cylinder Synchronization Control Based on Model Reference Fuzzy Adaptive Method [J].
Journal of Taiyuan University of Science and Technology, 2010. 4: p. 003.
[22] Zięba, J., Simulation of a Solenoid Actuator for a Device for Investigation Dynamic Air Permeability Through Flat Textile Products. Fibres & Textiles in Eastern Europe, 2003. 11(2): p. 85-87.
[23] Dülk, I. and T. Kovácsházy, A Sensorless Method for Detecting Spool Position in Solenoid Actuators. Carpathian Journal of Electronic & Computer Engineering, 2013. 6(1): p. 36-43. [24] John, J.D.A., H.H. Constantine, and N.S. Stuart, Linear control
system analysis and design with MATLAB. 2003, Marcel Dekker, Inc., Cimarron Road, Monticello, NewYork 12701,U.S.A.: Marcel Dekker, Inc., 270 Madison Avenue, NY10016: ISBN: 0-8247-4038-6: 822: Pg; 60-80.
[25] Stosiak, M., The modelling of hydraulic distributor slide–sleeve interaction. archives of civil and mechanical engineering, 2012. 12(2): p. 192-197.
[26] Chen, C.-Y., et al., Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system. Control Engineering Practice, 2008. 16(6): p. 658-673.
[27] Zhongwei, L., Hydraulic synchronization control system and its application on giant hydraulic press [J]. Hydraulics Pneumatics & Seals, 2007. 1: p. 004.
[28] Fisher, E.P.M., Control valve handbook: Fourth edition. 2005, Printed in U.S.A. Fisher Controls International LLC: Fisher Controls International LLC, a member of the Emerson Process Management business division of Emerson Electric Co. D101881X012: 277: Pg; 110-123.
[29] Khalil, M.K.B. Estimated versus Calculated Viscous Friction Coefficient in Spool Valve Modelling. in Proceeding of the national conference on fluid power: 20/05/2015: (51); Pg: 357-365. 2008.
[30] Koreisová, G., Identification of viscous damping coefficient of hydraulic motors. Scientific papers of the University of Pardubice. Series B, The Jan Perner Transport Faculty. 12 : 61-70, 2007.
[31] Robert, H.B., The mechatronics Handbook. 2002, Printed in the United States of America, Boca Raton, FL 33487-2742. : CRC Press. Taylor and Francis Group, 6000 Broken Sound Parkway N W Suite 300: ISBN 0-8493-0066-5: (2-1); (7-1)-(11-1); (16-1)-(34-1); (48-1)-(49-1).
[32] Karpenko, M. and N. Sepehri, On quantitative feedback design for robust position control of hydraulic actuators. Control Engineering Practice, 2010. 18(3): p. 289-299.
[33] Eryilmaz, B. and B.H. Wilson, Improved tracking control of hydraulic systems. Journal of Dynamic Systems, Measurement, and Control, 2001. 123(3): p. 457-462.
[34] Robert, H.B., Mechatronic System Control, Logic and Data Acquisition. 2008, Printed in the United States of America, Boca Raton, FL 33487-2742. : CRC Press. Taylor and Francis Group, 6000 Broken Sound Parkway N W Suite 300; ISBN: 978-0-8493-9260-3: (4-1)-(7-1); (13-1)-(15-1); (20-1); (23-1)-(24-1); (34-1). [35] Damic, V., M. Cohodar, and M. Kulenovic, Modeling and Simulation of Hydraulic Actuated Multibody Systems by Bond Graphs. Procedia Engineering, 2014. 69: p. 203-209.
[36] Li, K., et al., Thermal-hydraulic Modeling and Simulation of the Hydraulic System based on the Electro-hydrostatic Actuator.