Optimal Tuning Of UPFC Damping Controller
Using Single And Multi-Objective Evolutionary
Algorithms
Kannayeram G, Prakash NB, MunirajR, Sivakumar T
Abstract: In this paper, evolutionary algorithm based Unified Power Flow Controller (UPFC) damping controller has been designed to damp out the low frequency oscillations in power systems. The UPFC damping controller has been formulated as single and multi-objective optimization problems, to minimize the objective function considered by modulating the control parameters. The objective function considered in this work is to minimize the Integral Squared Error (ISE) of change in speed deviation and Integral Squared Error (ISE) of input control signal (u) under different loading conditions. The usefulness of the proposed controller is evaluated through time domain simulation and eigen value analysis. The optimal parameters and the objective function values obtained with single and multi-objective algorithms (PSO and MNSGA-II) are evaluated and the benefits of multi-objective optimization are explainedin FACTS controller tuning. Simulation result reveals that the MNSGA-II based damping controller damps out oscillations quickly with minimum control input as compared to thePSO based controller without compromising the stability of system.
Keywords: FACTS; UPFC; Damping Control; SMIB; PSO; MNSGA-II
————————————————————
1.
Introduction
The power transfer in a coordinated power system is compelled by transient stability, voltage soundness and small signal stability. These limitations limit a full use of accessible transmission passageways. Flexible AC Transmission Systems (FACTS) are the innovation that gives the required adjustments of the transmission usefulness so as, to completely use the current transmission offices and thus, limiting the gap between as far as possible and thermal limit. Modern power system has been connected by means of weak tie lines. Low frequency electromechanical oscillations are experienced among the group of interconnected generators. These oscillations create severe hazard to the normal operation of the power system. The oscillations residing within a plant are called local mode of oscillations. The range of frequency is in between 0.7– 2.0 Hz. The oscillations available in the interconnected power system are called inter-area mode oscillations. The range of frequency is in between 0.1–0.8 Hz. Power system stabilizers are also used to damp out oscillations and they cause large voltage variations with leading power factor operation and loose stability under severe disturbances. Fast development in the field of power electronics has opened new opportunities for the exercise of the Flexible AC Transmission System (FACTS) devices. Modulation of bus voltage, phase shift between the buses and the transmission line reactance are used to improve power system operation controllability and power transfer limits and they can be achieved by FACTS devices.
FACTS improve power system damping and also improve the system voltage profile. Unified Power Flow Controller (UPFC) is one of the important FACTS devices, which is used to damp out electromechanical oscillations in the power system and it also enhances small signal stability of the power system [1, 2]. UPFC is a combination of Static synchronous compensator (STATCOM) and a Static Synchronous Series Compensator (SSSC), which are joined through common DC link, to allow bi-directional flow of real power between the series converter SSSC and the shunt converter STATCOM. The primary function of UPFC is to control power flow on a given line and voltage at the UPFC bus. The UPFC can also be utilized for damping power system oscillations by incorporating a damping controller [3]. Steady state and dynamic models of UPFC have been developed by many researchers [4, 5]. H.F.Wang has developed a linear dynamic model named Modified Heffron-Phillips model for single machine system including UPFC [6, 7] and he has also proposed an approach for designing a robust UPFC damping controller for multi machine power systems [8]. N.Tambey et al. have proposed a complete approach for designing UPFC based damping controller using conventional phase compensation technique. The UPFC (mB,mE,B and E ) control parameters are modulated to achieve required damping [9, 10]. Fuzzy logic based UPFC controller adjusts the UPFC control inputs by suitably processing the input error signals and provides an efficient damping [11]. Robust control methods and Neuro-fuzzy control methods are also used for tuning UPFC damping controller [12, 13, 14]. Singular Value Decomposition (SVD), Minimum Singular Value (MSV), Hankel Singular Value (HSV) and Direct Component of Torque technique are efficient methods for selecting control signal in UPFC controller [15]. Sidhartha Panda et al. have been compared PSO and GA for the design of FACTS based controllers with speed deviation as an objective [19]. Many researchers have developed PSO
_______________________________________________
Kannayeram G, Assistant Professor (Senior Grade), Department of Electrical and Electronics Engineering, National Engineering College, Kovilpatti, India Email: [email protected]
Prakash NB, Associate Professor Department of Electrical and Electronics Engineering, National Engineering College, Kovilpatti, India Email: [email protected]
concepts like elitism, fast non-dominated sorting approach and diversity maintenance along the Pareto-optimal front. Non-dominated Sorting Genetic Algorithm-II (NSGA-II) has been successfully applied to various multi-objective engineering optimization problems [19, 20, 22 & 23-29]. Multi-objective algorithm NSGA-II has been used for the tuning of TCSC based damping controller by considering speed deviation and control signal as objectives [24]. The NSGA-II still falls short in maintaining lateral diversity and obtaining Pareto-front with high uniformity. To overcome this shortcoming, controlled elitism concept, which can maintain the diversity of non-dominated front laterally, has been proposed [19]. Also to obtain Pareto-front with high uniformity, Luo et al. have proposed DCD based diversity maintenance strategy [25]. Jeyadevi et al. have suggested Modified NSGA-II by incorporating control elitism and DCD features to ensure better convergence and diversity for solving multi-objective optimal reactive power dispatch problem [23]. Lakshminarasimman et al. have applied MNSGA-II for the optimal placement of mobile antenna [24]. Rajkumar et al. have also applied MNSGA-II for Combined Economic and Emission Dispatch with Valve-point loading of Thermal Generators [26]. Piraisoodi et al. have applied MNSGA-II for optimal nonlinear controller design in boiler turbine system [31]. In the present proposed work, MNSGA-II has been considered for the optimal design of UPFC damping controller( E) . Minimizing ISE of the error signal and input control signal (u) gives the optimum performance of the proposed UPFC controller under nominal, light and heavy loading conditions compared to other optimization techniques [32,33. 34]. For the purpose of understanding the benefits of multi-objective algorithms, the UPFC damping controller is also tuned with single objective algorithm PSO along with Integral Squared Error
the proposed UPFC damping controller has been explained. In section 5, an overview of PSO and MNSGA-II algorithm is described in detail. The simulation results and conclusions are given in Sections 6 and 7, respectively.
2.
SMIB system with UPFC Controller
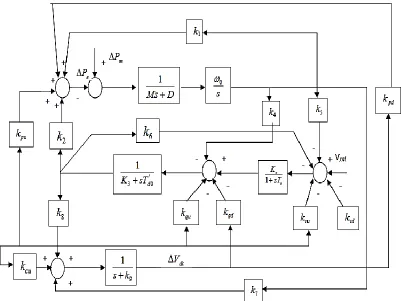
Figure.1 shows the Single Machine Infinite Bus system (SMIB) with UPFC controller. IEEE-ST1A type excitation system has been taken for this study.
E B
E
B m and
m , , are the control signals for UPFC
damping controller.
Figure.1 UPFC controller installed in SMIB system
Figure.2. Transfer function model of the SMIB system with UPFC
The state-space form of the system is given by,
Bu Ax
x
.
……… (1) where
x =
Tdc fd
q E V
E
'
T B B E
E m
m
u [ ]
The control parameters of UPFC are,
1. mB — Modulating index of series inverter
2. B — Phase angle of series inverter
3. mE — Modulating index of shunt inverter
4. E — Phase angle of the shunt inverter
4.
Problem Formulation
UPFC control parameter has been adjusted to produce the electrical torque required to compensate the deviations in speed. The controller parameters are tuned by using single and multi-objective optimization algorithms such as Particle Swarm Optimization (PSO) and Modified Non- Dominated Sorting Genetic Algorithm-II (MNSGA-II), respectively. The objective considered for minimization using single objective optimization is Integral Squared Error (ISE) of speed
Figure. 3 Structure of UPFC damping controller
For Single objective optimization,
dt t e F
t
) ( 1
0 2 1
……….……… (2)
And for multi-objective optimization, the objective functions are formulated as follows
1 2
min
,F F
F
………..…………. (3) Where,
F e t dt t
) ( 1
0 2 1 1
……….……… (4)
dt t e F
t
) (
1
0 2 2
In this study, optimal parameters of UPFC damping controller are determined by subjecting the system to disturbance. The optimal parameters are obtained using evolutionary algorithms like PSO and NSGA-II by considering Integral squared error of speed deviation and
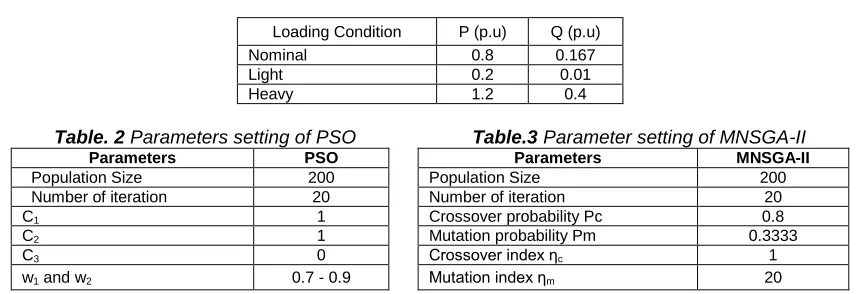
conditions. The different loading conditions and parameters considered are shown in Table.1. Further, the parameters settings considered for PSO and MNSGA-II are shown in Tables 2 & 3.
Table.1. Loading conditions
Loading Condition P (p.u) Q (p.u)
Nominal 0.8 0.167
Light 0.2 0.01
Heavy 1.2 0.4
Table. 2 Parameters setting of PSO Table.3 Parameter setting of MNSGA-II
Parameters PSO Parameters MNSGA-II
Population Size 200 Population Size 200
Number of iteration 20 Number of iteration 20
C1 1 Crossover probability Pc 0.8
C2 1 Mutation probability Pm 0.3333
C3 0 Crossover index ηc 1
w1 and w2 0.7 - 0.9 Mutation index ηm 20
5.1 Nominal Loading condition
In this loading condition, the damping controller performance is valued by giving a mechanical disturbance of Pm=0.01 p.u. The optimal values of the lead-lag compensator gain and time constants obtained for this loading condition are illustrated in Table 4. In PSO, the objective function considered (Speed deviation) has minimum value with higher control input whereas MNSGA-II provides better damping performance with minimum control energy. The AC voltage regulator (mE ) type damping
controller provides outstanding performance with minimum objective function values thereby damps out oscillations quickly while tuning with MNSGA-II. In single objective
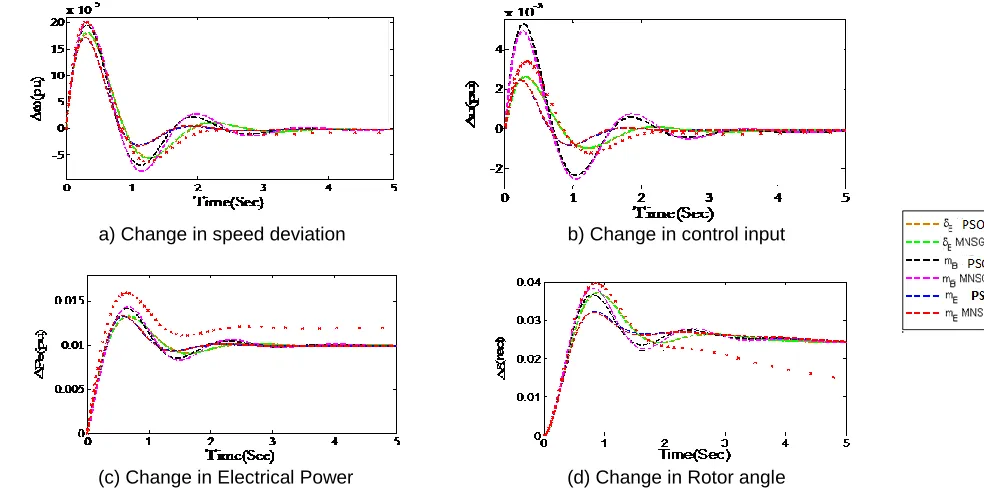
tuning using PSO, E controller provides better performance compared to other controllers [30]. Figure.4 (a,b,c) shows the changes in speed deviation, input control signal and electrical power deviation obtained for SMIB system with UPFC controller for 1% change in mechanical input and it confirms that mE damping controller provides
better performance with minimum control energy for MNSGA-II algorithm compared to other controllers. Rotor angle deviation is the important parameter for the analysis of small signal stability. Figure 4 (d) shows the changes in rotor angle for different controllers. From the response, it is evident that the proposed MNGA-II based UPFC controller improves the small signal stability of the power system.
Table. 4 Optimal parameters of Nominal loading condition (Pm=0.01p.u)
Controller
Algorithm
E mB mE
Lead –lag compensation
E
PSO MNSGA II PSO MNSGA II PSO MNSGA II
P
a
ra
m
e
te
rs K 49.8959 13.7235 38.9826 18.2067 29.8908 10.1629 18.0960 T1 0.4090 0.2436 0.5927 0.3772 0.5987 0.3905 0.2296
T2 0.2112 0.2078 0.3109 0.2005 0.3100 0.2011 0.2516
F1 3.458e-5 3.7498e-7 8.779e-5 4.6077e-7 5.144e-5 3.3542e-7 3.4983e-5
a) Change in speed deviation b) Change in control input
(c) Change in Electrical Power (d) Change in Rotor angle
Figure. 4 Dynamic responses of different UPFC at Nominal loading with Pm=0.01p.u
6.
Eigen Value Analysis
Eigen values help to understand the stability of the system and the eigen values attained for nominal loading condition of SMIB system are presented in Table.5. The eigen values
obtained through the proposed MNSGA-II based UPFC are in the left half of the s-plane and they ensure that the proposed controller improves the stability of the system.
Table.5 Eigen values at Nominal loading condition
Eigen values of UPFC controllers (MNSGA-II) Eigen values of UPFC controllers (PSO)
mE mB E E mB mE
-98.3488 -4.4558 -1.0671 +
4.0122i -1.0671 -
4.0122i -1.8787 -0.1020 -0.0270
98.4224 -1.6629 +
4.0127i -1.6629 -
4.0127i -4.8775 -1.7920 -0.1035 -0.0269
98.2897 -5.6235 -1.3924 + 3.2658i
-1.3924 - 3.2658i -2.2916 -0.1015 -0.0270
-97.3526 -64.2087 -2.0185 -0.7446 +
0.7891i -0.7446 - 0.7891i
-0.1128 -0.0270
-98.6991 -19.6846 -0.1123 -0.0269 -2.3962 -1.6114 -1.9036
-100.88 -40.56
-5.33 -2.00 -0.17 + 0.09i -0.17 - 0.09i
-0.03
7.
Conclusion
In this work, single and multi-objective algorithms based UPFC damping controller tuning has been performed by minimizing the ISE of the change in speed deviation and input control. In order to assess the robust performance of the proposed controller, the system has been subjected to different loading conditions and analyzed. Simulation results reveal that the single objective optimization gives minimum speed deviation with higher input control signal. However, multi-objective optimization provides superior damping performance with considerable decrease in control signal compared to other optimization methods based on
performance compared to other UPFC controllers. The Eigen value analysis proves that the proposed MNSGA-II based UPFC damping controller greatly improves the stability of the power systems.
Conflict of Interest
The authors confirm that there is no conflict of interest to declare for this publication.
Acknowledgement
[3]. N. Ray Chaudhuri, and M. L. Kothari, Senior Member, IEEE, ―Optimum Design of UPFC Controllers Using GEA:Decoupled Real & Reactive Power Flow and Damping Controllers,‖ IEEE International conference. Proceeding of Power Electronics,Drives and Energy systems, 2006. [4]. Nabavi-Niaki.A and Irvani.M.R, ―Steady state and
dynamic models of Unified Power Flow Controller for power system studies‖, IEEE Trans Power Sys Vol. 11, No. 4, pp. 1937-1943, 1996
[5]. Smith.K.S, Ran.L and Penma.J, ―Dynamic modeling of a UPFC‖, IEE proc-Gener. Trans. Distrib, Vol. 144, No.1, pp. 7-12, 1997.
[6]. H F Wang, ―Damping Function of Unified Power Flow Controller,‖ IEE proceedings-C, Vol. 146, no 1, pp.81-87, January 1999.
[7]. HaiFeng Wang, ―A Unified Model for the Analysis of FACTS Devices in Damping power System Oscillations-Part III: Unified Power Flow Controller,‖ IEEE transaction on power delivery Vol.15, No.3, pp. 978-983, July 2000.
[8]. H.F. Wang: ―Application of modeling UPFC into multi-machine power systems‖ IEE Proc. Gen. Trans. and Dist.Vol.146:pp.306-312, 1999.
[9]. N.Tambey and M.L.Kothari, ―Damping of power system oscillations with unified power flow controller (UPFC)‖, IEE proceedings-Generation, Transmission & Distribution Vol. 150, No. 2, pp.129-140, March 2003.
[10]. N.Tambey , M.L.Kothari: ―Unified Power Flow Controller(UPFC) based damping controllers for damping low frequency oscillations in a power system‖, IE(I) EL, Vol.84,pp.35-41,2003.
[11]. A.Majid Dejamkhooy,M.Banejad,Nasser Talebi, ― Fuzzy logic based UPFC controller for damping low frequency Oscillations of power systems‖, PECON-2008,December 1-3,2008, Malaysia.
[12]. T.K. Mok, Y. Ni, F.F. Wu., ―Design of fuzzy damping controller of UPFC through genetic algorithm‖, IEEE Power Eng. Society Summer Meeting, Vol.3, pp.1889 – 1894, 2000.
[13]. P.K. Dash, S. Mishra, G. Panda, ―A radial basis function neural network controller for UPFC‖, IEEE Trans. Power Systems, Vol. 15, pp.1293 -1299, 2000.
[14]. M.Vilathgamuwa, X. Zhu, S.S. Choi, ―A robust control method to improve the Performance of a unified power flow controller,‖ Electric Power System Research. Vol. 55, pp.103-111, 2000.
[15]. R.K.Pandey, N.K.Singh, ―UPFC Control parameters identification for effective power oscillation damping‖, International journal of Electrical Power & Energy Systems, Vol. 31, No. 6,pp. 269-276, July 2009. [16]. M.A.Abido, A.T.Al.Awami, Y.L Abdel Magid: ―A
particle-swarm-based approach of power system
―Design of output feedback UPFC Controller for damping of electromechanical oscillations using PSO‖, Energy Conversion and Management, Vol.50, No. 10, pp.2554-2561,October 2009.
[19]. Sidhartha Panda, Narayana Prasad Padhy, ―Comparison of particle swarm optimization and Genetic algorithm for FACTS based controller design‖, Applied Soft Computing, Vol. 8, No. 4, pp. 1418-1427, September 2008.
[20]. K.Deb, ―Multi-Objective Optimization using Evolutionary Algorithms‖, Wiley-Inter science Series in Systems and Optimization, John Wiley & Sons, 2001.
[21]. N.Srinivas, K.Deb, ―Multi-Objective Optimization using Non-dominated sorting in genetic algorithms‖, Evolutionary computation, Vol. 2, No. 3, pp. 221-248, 1994.
[22]. K.Deb, A.Pratap , S.Agarwal, T.Meyarivan, , ―A fast elitist multi-objective genetic algorithm: NSGA-II‖, IEEE Transactions on Evolutionary Computation, Vol.6, No. 2, pp. 182-197, 2002
[23]. S.Panda, ―Multi-objective evolutionary algorithm for SSSC-based controller design‖, Electric power system Research, Vol.79, No. 6, pp. 937-944, 2009. [24]. S.Panda, ―Application of non-dominated sorting
genetic algorithm-II for optimal FACTS- based controller design‖, Journal of the Franklin Institute, Vol.347, No. 7, pp.1047-1064, 2010.
[25]. M.Willjuice Iruthayarajan, S.Baskar, ―Evolutionary algorithms based design of multivariable PID controller‖, Expert Syst. Appl., Vol.19, pp. 9159-9167, 2009.
[26]. M.Balaji, V.Kamaraj, ―Evolutionary computation based multi-objective optimization of switched reluctance machine‖, Electr Power Energy Syst., Vol.43, pp.63-69, December 2012.
[27]. L.Kalaivani, P.Subburaj, M.Willjuice Iruthayarajan, ―Speed control of switched reluctance motor with torque ripple reduction using non-dominated sorting genetic algorithm(NSGA-II)‖, Electr Power Energy Syst., Vol.53, pp. 69-77, 2013.
[28]. M. Rajkumar, K.Mahadevan, S.Kannan and S.Baskar : ―NSGA-II Technique for Multi- objective Generation Dispatch of Thermal Generators with Non smooth Fuel Cost Functions‖, J Electr Eng Technol, Vol.9, No.2:pp. 423-432,2014.
[29]. Sidhartha Panda, ―Multi-objective PID controller tuning for a FACTS-based damping stabilizer using Non-dominated Sorting Genetic Algorithm-II‖, Electr Power Energy Syst., Vol.33, pp.1296-1308, 2011. [30]. Rajendra Ku Khadanga, Jitendriya Ku Satapathy: ―A
1060-1069, 2015.
[31]. Piraisoodi, T, Willjuice Iruhthayarajan, M & Mohaideen Abdul Kadhar, K 2017, ―Application of single and multi-objective evolutionary algorithms for optimal nonlinear controller design in boiler turbine system‖, International Journal of Fuzzy Set
[32]. Albatsh, FM, Mekhilef, S, Ahmad, S & Mokhlis, H 2017, 'Fuzzy logic based UPFC and laboratory prototype validation for dynamic power flow control in transmission lines', IEEE Transactions on Industrial Electronics.
[33]. Amin Safari 2013, 'Θ-PSO algorithm for UPFC based output feedback damping controller' , International Journal of Control and Automation, vol. 6, no. 1, pp. 33-46.
[34]. Fadi, M, Shameem, A, Saad, M, Ibrahim, A & Mohd Fairuz, AH 2017, 'Power flow control using fuzzy based UPFC under different operating conditions', Journal of Electrical Systems, vol. 13, no. 2, pp. 398-414.
[35]. Kannayeram, G , Manoharan, PS, Willjuice Iruthayarajan, M & Sivakumar, T, 2018, ‗Tuning of unified power flow controller (UPFC) using PSO and NSGA-II Investigations‘, Journal of Electrical Engineering, vol.18, issue.2, pp.488-495
[36]. Kannayeram, G , Manoharan, PS & Prakash , NB, 2018 ‗PI-tuned UPFC damping controllers design for multi-machine power system‘, Journal of Measurements in Engineering, Vol. 6, No. 2, pp.81-92.
[37]. Kannayeram, G, Manoharan, PS, Willjuice Iruthyarajan, M & Sivakumar, T 2018, ‗UPFC damping controller design using multi-objective evolutionary algorithms‘, International Journal of Business Intelligence and Data mining, vol. 13, no. 1/2/3, pp. 52-74
[38]. Khodabakhshian, M, Esmaili, R & Bornapour, M 2016, 'Optimal coordinated design of UPFC and PSS for improving power system performance by using multi-objective water cycle algorithm', International Journal of Electrical Power and Energy Systems, vol. 83, pp. 124-133.