280524 963
N um erical S tu d y o f N onlinear
E volution E quations, U sin g
C om pact D ifferencing
L in zh on g Li
September, 1997
UCL
A Thesis Submitted to the University of London
for the Degree of
Doctor of Philosophy
Department of Mathematics
ProQuest Number: U642119
All rights reserved
INFORMATION TO ALL USERS
The quality of this reproduction is dependent upon the quality of the copy submitted.
In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed,
a note will indicate the deletion.
uest.
ProQuest U642119
Published by ProQuest LLC(2015). Copyright of the Dissertation is held by the Author.
All rights reserved.
This work is protected against unauthorized copying under Title 17, United States Code. Microform Edition © ProQuest LLC.
ProQuest LLC
789 East Eisenhower Parkway P.O. Box 1346
A cknow ledgm ents
I cannot adequately express my deepest gratitude to my super
visor, Professor Frank T. Smith, for his constant encouragement
and attention, unequivocal support and concern throughout my re
search and subsequent preparation of this thesis. My thanks go
wholeheartedly to him. I would also like to thank my colleagues at
University College London for their assistance.
A b stract
This thesis consists of eight chapters and four appendices. C h ap ter one is an
introduction, m ainly concerning num erical schemes b u t p artly also th e present
context in fluid dynamics. In chapter two, com pact difference schemes (CDS) are
introduced and reviewed, and th en an extension for upwinding CDS is described.
In addition, comparision between two different kinds of upwinded CDS is m ade
through num erical experim ents for B urgers’ equation. C hapter th ree explores th e
application of CDS to th e KdV equation, and th e stability, conservative and phase
properties of th e proposed scheme are studied. In chapter four, fluid-dynam ical
theory is discussed regarding th e collapse of an unsteady interacting boundary
layer and th e developm ent of shortened length and tim e scales, in th e near-wall
dynam ics of internal or external tran sitio nal-tu rb u len t boundary layers or during
dynam ic stall. This theoretical study yields for certain internal flows an extended
KdV equation and for external or quasi-external flows an extended B enjam in-O no
equation, governing th e unknown surface pressure. The rest of th e thesis is de
voted to th e num erical study of these two classes of evolution equations. F irst, in
chapter five th e treatm en ts of boundary conditions and of Cauchy principal-value
integrals are discussed, applying asym ptotic expansions and Taylor expansions,
respectively. In addition, a transform ation and an algorithm are form ulated in
this chapter, for effective com putation. Then chapters six and seven focus on th e
num erical com putation of th e extended KdV and Benjam in-O no equations w ith
CDS, respectively. The com putation is perform ed in both th e physical and th e
transform ed planes and the effect of centred and noncentred schemes is carefully
exam ined. This p a rt of th e work also includes th e num erical tracking of nonlinear
wave packets, num erical capture of finite-tim e break-ups and th e calculation of
th e grow th ra te for a rapid secondary instability. Finally, concluding rem arks are
C on ten ts
A ck n ow led gm en ts 3
A b stra ct 4
C h ap ter 1 Introd u ction 8
C h ap ter 2 C om pact D ifference Schem es 13
2.1 In tr o d u c tio n ... 13
2.2 Extending Upwind Com pact Finite-Difference S c h e m e s ... 15
2.3 C om pact Difference Schemes for th e B urgers’ e q u a t i o n ... 28
C h ap ter 3 C om pact D ifference Schem es for th e K d V E q u ation 47 3.1 In tr o d u c tio n ... 47
3.2 B oundary Conditions and A lg o rith m s ... 49
3.3 Tem poral Stability A n a l y s i s ... 53
3.4 The Conservative and Phase P r o p e r tie s ... 55
3.5 Spatial S ta b ility ... 58
3.6 N um erical E x p e rim e n ts... 62
layers: local d evelopm ent o f norm al pressure gradients 71
4.1 I n tr o d u c tio n ... 71
4.2 F inite-tim e break-up in unsteady interacting boundary layers (or th e nonlinear TS stage): step 1 76
4.3 T he intrusion of norm al pressure gradients: step 2 ... 81
4.4 Solution behavior for positive j l ... 87
4.5 Negative / I ... 93
4.6 Zero / i ... 95
4.7 Further c o m m e n ts... 101
C hap ter 5 N um erical Investigation o f th e E x ten d ed K d V and B en jam in-O no E quations 105 5.1 In tr o d u c tio n ... 105
5.2 B oundary C o n d itio n s ... 107
5.3 C oordinate T ran sfo rm atio n ... 112
5.4 The T reatm ent of Cauchy Integrals and Basic Idea of th e Algo rithm s for Nonzero ji C a s e 114 5.4.1 F inite P a rt I n t e g r a l s ... 116
5.4.2 T he A lgorithms for Nonzero j i...123
C h ap ter 6 T h e N u m erical Solution o f th e E x ten d ed K d V E q u ation 126 6.1 T he KdV Equation: /i = 0 ,as = 0 ... 126
6.1.1 D iscretization in th e Physical P l a n e ... 127
6.1.2 D iscretization in th e Transform ed P l a n e ... 136
6.2 E xtended KdV Equation: ^ > 0, Ug = 0 ... 146
6.2.2 The C om putation in th e Transform ed P l a n e ...152
6.3 The E xtended KdV Equation: /i < 0, as = 0 ... 168
C hap ter 7 T h e N um erical Solution o f th e E x ten d ed B enjam in-O no E quation 183 7.1 The B enjam in-O no Equation: p, = 0, = 0 ... 183
7.1.1 The C om putation in th e Physical Plane ... 184
7.1.2 The C om putation in th e Transform ed P l a n e ...196
7.2 The E xtended Benjam in-O no Equation: p ^ 0, = 0 ... 214
C h ap ter 8 C oncluding R em arks 220
A p p en d ix A T h e A n alytical solution o f a Linear T im e-D ep en d en t
P rob lem 223
A p p en d ix B On F in ite-tim e B reak-up in th e G eneral C ase 226
A p p en d ix C Further Features in th e Term inal Solution o f section
4.4 229
A p p en d ix D T h e D erivatives o f th e Initial F unctions for th e E x
ten d ed K d V and B enjam in-O no E q uations 232
C hapter 1
In trod u ction
This thesis is m ainly concerned w ith th e num erical study of nonlinear evolu
tion equations, using finite-difference m ethods (R ichtm yer & M orton 1967, Sm ith
1985). In term s of tim e discretization, any finite-difference m ethod falls into one
or other of two different general approaches, an explicit approach or im plicit ap
proach. In an explicit approach, th e resulting difference equations can be solved
explicitly for the unknowns at each tim e level, in a straightforw ard m anner, while
an im plicit approach is one where the unknowns m ust be obtained by m eans of a
sim ultaneous solution of th e difference equations applied at all th e grid points ar
rayed at a given tim e level. Generally speaking, an explicit approach is relatively
sim ple to set up and program , b u t it tends to suffer from poor stability. For a
p a rtia l differential equation w ith independent spatial and tim e variables x and t,
respectively, this m eans th a t for a given spatial step A x, th e tim e step A t m ust be
less th a n some lim it imposed by a stability constraint (Roache, 1972). Especially
for problem s w ith an abruptly-varying solution, a very fine grid spacing has to
be applied to resolve the solution, and so th e corresponding restriction on A t can
be very severe and consequently lead to a very large com puter-tim e requirem ent
over a given interval of t. On th e other hand, an im plicit approach can be un
conditionally stable. Hence th e choice of tim e step A t th en can be based solely
on th e requirem ent for accuracy; therefore it is possible for an im plicit m ethod
to use considerably fewer tim e steps to make a satisfactory calculation over a
given interval of t. This advantage of an im plicit approach m ay com pensate for
its m uch larger com putational effort per tim e step. However, it m ust be pointed
out th a t th e balance between explicit and im plicit approaches very m uch depends
on th e specific problem being addressed, and even for a given problem th e choice
far as th e problem s of interest in this thesis are concerned, th e solutions can be
expected to exhibit some kind of rapid variation around a p articu lar range of x,
especially when the solutions are approaching a singularity, so th a t a sm all grid
spacing is necessary to resolve the ab ru p t variation of th e solutions. Therefore
an im plicit approach, we believe here, is a more suitable one th a n an explicit
approach. Hence, in this thesis, im plicit m ethods are applied exclusively to our
problems.
As regards th e spatial x discretization, we a tte m p t to apply higher-order dif
ference schemes wherever it is possible. The num erous applications of higher-
order schemes to various fluid flow problem s clearly shows th e advantage of
higher-order schemes over conventional first or second order schemes. For in
stance, H irsh (1975) has solved two-dimensional low-Reynolds-number viscous
steady flows using a com pact fourth-order scheme. For roughly th e sam e accu
racy, this fourth-order scheme showed savings over a second-order scheme of a
factor of 20 in com puter tim e and a factor of 3 in storage. The conventional
higher-order m ethods use m ulti-point approxim ations. For exam ple, a conven
tional fourth-order approxim ation involves five local points. This involvement
of say five (or more) grid points imposes difficulties in the tre a tm e n ts of th e
boundary conditions and the resulting algebraic system s (Roache, 1972). A more
prom ising developm ent is the use of “com pact differencing” m entioned above.
This kind of m ethod is an effectively favourable three-point approxim ation, b u t
introduces new variables (say the derivatives of th e principal function) to form a
coupled system . In th e sense of th e global dependence of discretization, a com
pact scheme is more similar to a spectral or a pseudo-spectral m ethod. These
schemes are sometimes called H erm itian schemes, and can also be obtained from
a finite elem ent form ulation (P eyret & Taylor 1983, Hirsch 1988). A large num ber
of applications of these schemes to the solution of fluid-m echanical equations have
been developed, e.g. see Hirsch (1988), and references therein. In this thesis, we
also pursue th e application of com pact techniques in th e spatial discretization.
F urth er review of th e field m ostly accompanies th e descriptions of th e indi
vidual chapters in th e thesis as presented below.
It should be noted th a t higher-order m ethods do not solve th e cell Reynolds
problem , which imposes a severe lim itation (cell Reynolds-num ber lim itatio n)
(Roache, 1972) on mesh length h when central-differencing is used for b o th first
and second derivatives in th e discretization of convection-dom inated fluid flow
tion of th e centred CDS in Berger et al (1980), Leventhal (1982) and C hristie
(1985). To avoid this problem, upwind-difference (or m ore precisely noncentred-
difference) approxim ation for th e first derivative is also needed for higher-order
discretizations. There are two different m ethods to upw ind CDS. One is to in
troduce a p aram eter into th e stan d ard CDS and seek an optim al choice of th e
p aram eter value, say as in C hristie’s upwinding CDS (C hristie, 1985). This ap
proach retains th e original fourth-order accuracy. The other is th e sam e as th e
conventional strategy for upwinding, i.e. using a forward scheme and a back
w ard scheme together, say as in Tolstykh’s nonsym m etric CDS (Tolstykh, 1986),
which is a third-order scheme. In chapter two, C hristie’s upw inding CDS is ex
tended and am ended to deal w ith more general cases, and com parison betw een
C h ristie’s and Tolstykh’s CDS is m ade by num erical experim ents for B urgers’
equation. In this chapter, we propose a general form of CDS, which accom m o
dates th e third-order noncentred and Tolstykh’s upwinding CDS as well as th e
fourth-order centred and C hristie’s upwinding CDS. This general form of CDS
is th e basis of th e algorithm s which are applied to several nonlinear evolution
equations in th e succeeding chapters. F urther com m ents on accuracy are m ade
in th e th ird of th e following paragraphs.
T here exist m any num erical m ethods for solving th e KdV equation, b u t
m ost of th em have th e explicit feature, say the leap-frog m ethod (Zabusky &
Kruskal, 1965), th e Hopscotch m ethod (Greig & Morris, 1976) and th e semi-
im plicit m ethod (Li, 1995). In chapter three, we explore th e application of CDS
to th e K dV equation, the proposed schemes there being fully im plicit. Stability,
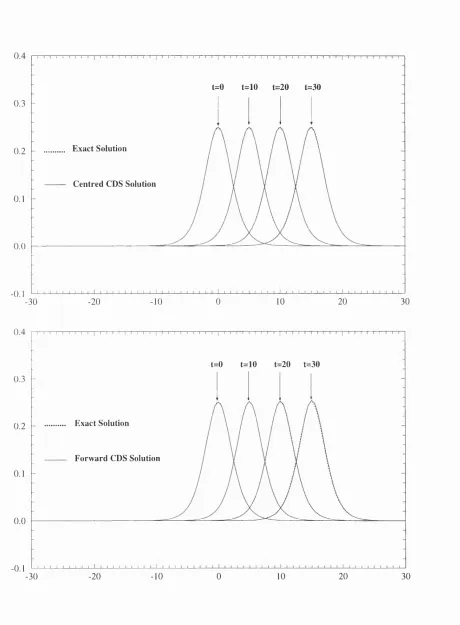
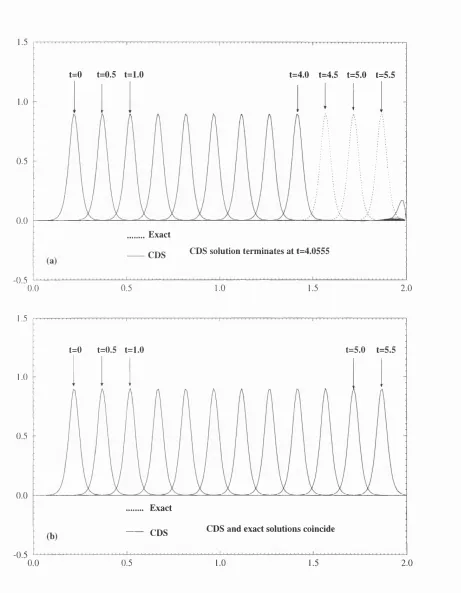
conservative and phase properties are studied for th e centred CDS. N um erical
experim ents in this chapter then show th a t favourable results are obtained by th e
proposed CDS, com pared w ith other m ethods for th e KdV equation.
In chapter four, huid-dynam ics theory is discussed regarding th e collapse of
an unsteady interacting boundary layer and th e developm ent of shortened length
and tim e scales, in th e near-wall dynamics of internal or external transitional-
tu rb u len t boundary layers or during dynam ic stall. The chapter is a join t sub
m itte d paper w ith Prof. J.D .A . W alker, Dr. R.I. Bowles & Prof. F .T . Sm ith.
This is for large values of the characteristic Reynolds num ber. F in ite-tim e break
up of th e unsteady interacting boundary layer occurs first. T he next stage th en
is described, where norm al pressure gradients come into operation along w ith a
continuing nonlinear critical-layer jum p. The theoretical study yields for certain
internal flows an extended KdV equation and for external or quasi-external flows
surface pressure. It is found th a t solution properties of these evolution equations
depend on th e signs of a coefficient jl m ultiplying th e Cauchy principal-value inte
grals in th e equations. Therefore both th e theoretical account in this ch ap ter and
th e num erical study in the subsequent chapters are presented for zero, positive
and negative values of th e param eter /t for th e extended KdV and B enjam in-O no
equations, respectively.*
In fact, a higher-order scheme itself does not m ean higher accuracy. Sufficient
accuracy of com putation is essentially ensured by two factors: th e accuracy of
“resolution” of elem entary p arts of th e phenom enon under consideration and the
accuracy of th e algorithm itself. The first factor is associated w ith th e construc
tion of difference meshes ensuring a sufficient num ber of points in th e subdom ains
of th e com putational dom ain which have th eir local characteristic size. One of
th e m ethods of constructing sub-difference meshes is by a coordinate transfor
m atio n , which provides a unique characteristic scale in th e new variables, w ith a
subsequent uniform distribution of m esh points. Thus, w ith this kind of transfor
m atio n , th e approxim ation error of the difference algorithm depends on th e order
of accuracy of th e scheme and on the higher-order derivatives of th e solution of the
differential equations w ith respect to th e new variables. Hence th e “resolution”
of m eshes is directly related to th e real accuracy of th e difference scheme, i.e.
an appro p riate transform ation of coordinates m ay result not only in an optim al
arrangem ent of mesh-points, b u t also in sm oothing of abruptly-varying functions.
For our problem s, we may expect solutions to develop singularities or some forms
of ab ru p t variation around th e origin (say) a t some tim es. Therefore in chap
te r five, after an asym ptotic expansion is carried out to deal w ith th e boundary
conditions at infinity, a coordinate transform ation is form ulated to cluster th e
m esh points into th e range w ith th e most rapid variation of the solution. This
transform ation plays the role of stretching th e grid in one coordinate direction,
which tu rn s out to be very effective in the com putations presented in th e following
chapters six and seven.
Also in chapter five, first-, second- and third-order form ulae are derived to
handle th e Cauchy principle-value integrals, using Taylor expansions. T hen we
reach the point at which to form ulate th e whole algorithm for th e extended K dV
and B enjam in-O no equations w ith nonzero p aram eter ji. Here we adopt a dif
ferent strategy from th a t applied by Prof. Frank Sm ith w ith Dr. J.M . Hoyle
rep o rted in Hoyle (1991) and th a t applied by David W alker and Ju n He (private
com m unications 1994 w ith W alker), which lag th e com putation of th e Cauchy
integrals at each tim e level. The iteration for the Cauchy integrals is done to
11
ensure th a t th e governing equation is satisfied closely. A lthough this tre a tm e n t
is som ewhat tim e-consum ing, the com putations carried out in chapters six and
seven seem to show th a t its good perform ance in capturing th e singularity and
resolving th e short waves in th e solutions is w orth th e effort.
In chapter six, first, th e com putation for zero /x, i.e. th e stan d ard K dV equa
tio n along w ith unusual boundary conditions, is carried out in b o th th e physical
and th e transform ed planes. The theoretical study for this K dV equation at large
tim e is given in section 4.6 of chapter four. Second, th e com putation for positive
jl in th e transform ed plane clearly dem onstrates a fu rth er finite-tim e singularity.
T he theoretical local account for this phenom enon is also given in chapter four.
T he com putation for negative ji suggests, th ird , th e presence of a short-wave
instability. In chapter four, an analytical explanation is given, which leads to
a form ula for th e tem poral growth rate of any short-wave disturbance. T here
fore th e final section of chapter six is devoted to com paring th e form ula, by th e
calculation of th e num erical growth rates.
The com putation for th e Benjam in-Ono equation and th e extended Benjam in-
Ono equation is done in chapter seven. The num erical results show a p a tte rn
sim ilar to th a t in th e KdV or extended KdV cases. Thus th e solution w ith zero
jl develops a beautiful traveling wave packet at larger tim e, and num erically it
seems this travel can be m aintained accurately for a very long tim e provided th a t
sufficiently sm all grid spacings and tim e steps are taken. Again, th e solution w ith
nonzero ji develops th e fu rth er finite-tim e singularity or short-wave instability,
depending on th e signs of ji and another p aram eter in th e equation.
Finally, fu rth er com m ents and suggestions for future study are given in chapter
C hapter 2
C om pact D ifference Schem es
2.1
In tr o d u c tio n
A higher-order m ethod coupled w ith easily solvable system s is clearly
desirable for th e num erical sim ulation of a fluid problem . High order of accuracy
is usually sought for th e spatial differential operator. Higher-order schemes can
be constructed by th e classical finite-difference approxim ations, which essentially
apply a linear com bination of functional values at some discretization points to
approxim ate derivatives of th e function. However, th e higher th e approxim ation
th e higher th e num ber of discretization points involved. In this way, a fourth-
order accurate m ethod generally involves five points and consequently leads to an
algebraic system w ith a pentadiagonal m atrix , and th e boundaries also require
special consideration, since fictitious points near b o th boundaries are created.
G enerally speaking, three-point hnite-difference discretization, which forms th e
basis for th e overwhelming m ajority of num erical solutions of th e equations of
fluid m echanics, is desired, since th e resulting algebraic m atrix system is of a
tridiagonal or block-tridiagonal form; therefore an efficient and well developed
two-pass algorithm (A hlberg et al., 1967) can be applied to invert th e m atrix
operator, and no fictitious point near th e boundaries is created. A nother way
to construct higher-order schemes which has th e above advantage is th e use of
“co m p act” m ethods. The basic idea of this m ethod is to introduce new variables
(generally th e derivatives of solution) instead of new discretization points, and
relationships among the variables and functions at three adjacent m esh points,
to form a closed coupled system together w ith th e differential equation as well
schemes in th e above sense, which is more general th a n K reiss’ original suggestion
(O rszag & Israeli, 1974) on “com pact differencing” (it is this suggestion th a t
sparked th e application and study of this class of higher-order schem es), say
H erm itian collocation , Fade approxim ation, and polynom ial spline, and K reiss’
com pact scheme can be generated from any of them ; see R ubin &: Khosla (1976).
Since K reiss’ suggestion, m any higher-order schemes have been generated using
th e above strategy and have been applied to various fluid problem s (H irsh 1975,
R ubin & Khosla 1976, Berger et al 1980 and A ubert & Deville 1983), especially
in recent years, and the application of higher order com pact difference schemes
to fluid problem s has become more usual practice; see Rohichi & Floryan (1995),
Adam s & Shariff (1996), W einan & Liu (1996), Fu & M a (1997), R avichandran
(1997), Yee (1997) and Jeon (1997).
Basically th ere are two different classes of com pact finite-difference schemes.
T he m ethods developed by Berger et al (1980), Cim ent & Leventhal (1975,1978b),
C im ent et al (1978a) and Leventhal (1982) can be regarded as one class derived
from a tre a tm e n t of th e whole differential equation, as distinct from th e oth er class
of com pact differencing m ethods which has been used by Hirsh (1975), and by
A ubert & Deville (1983), where derivatives are approxim ated individually to high
order. Two different forms of upwinding for these two classes of com pact m ethods
have also been presented, for the reason th a t standard num erical solutions often
contain nonphysical oscillations in convection dom inated problem s, such as in
fluid flow at m oderate to large Reynolds num bers, see Berger et aL Leventhal
(1982) and C hristie (1985). In Christie (1985), C hristie applied th e stan d ard
com pact finite-difference scheme used by Hirsh (1975) to th e m odel problem
u (æ) — K u (x) = 0, X e [0,1], (2.1a)
u (0) = 1, u ( l) = 0, (2.1b)
where K is a positive constant. He showed th a t there exists a negative root in th e
characteristic polynom ial of a five point form ula which is equivalent to th e corre
sponding stan d ard com pact scheme. This means th a t th e solution w ith th e stan
dard com pact scheme contains oscillations. In addition, the continued presence of
oscillatory solutions for a sim ilar problem was also noted by C im ent et al (1978a).
To remove th e oscillatory behavior, Christie introduced a free p aram eter into th e
stan d ard com pact scheme to produce upwind com pact finite-difference schemes
which can significantly dam p out oscillations through an optim al choice of th e
free param eter. In section 2.2 below, C hristie’s upwinding m ethod is am ended
A nother way to upwind K reiss’ com pact difference scheme is by th e use of
T olstykh’s nonsym m etric com pact scheme (Tolstykh, 1986). In section 2.3, a gen
eral form which combines K reiss’ com pact scheme w ith Tolstykh’s nonsym m etric
schemes is given for B urgers’ equation. This scheme perm its th e application of up-
winding. A nd also in this section C hristie’s upwinding com pact difference scheme
is am ended to deal w ith a m ore general situation of nonlinear problem s. C om par
isons of results from K reiss’s com pact scheme, C hristie’s scheme and T olstykh’s
scheme are m ade through num erical experim ents for two m odel problems.
2.2
E x te n d in g U p w in d C o m p a ct F in ite-D ifF
ere-n ce S ch em es
Consider th e 1-dimensional m odel problem:
u \ x ) — K u { x ) — Cu{x) = 0, æ G [0,1], (2.2a)
u (0) = 1, u ( l) = 0. (2.2b) If (7 = 0, (2.2) becomes (2.1). The characteristic equation of (2.2a) is
- K r - C = 0, (2.3)
and when A = + 4(7 > 0, (2.3) has two different real roots:
So, in this case, th e theoretical solution of (2.2) is found to be
pT-a® _ pT-2- r i ( l - x )
^ 1 _ grg-n •
Divide th e u n it interval into N equal subintervals [(i — l)/t,%/t], i = 1,2, • • JV,
where th e grid spacing h = 1/iV. Then the application of th e stand ard com pact
finite-difference scheme to (2.2a) gives
g (^i+ i + + -Pi-i) = ^ ( (7^+1 — (A -i), (2.6a) — (•S'i+i + 105i + S i- \) = — (C/j+i — 2Ui + t/i- i) , (2.6b)
where Fi and Si are approxim ations to th e first and second derivatives respec
tively. These equations hold for z = l , 2, ••• ,i\T — 1 and (2,6c) also holds at
i = 1 , N . Therefore additional boundary conditions are required.
Taylor series expansions show th a t
Fi = U : ~ + • ■ • , (2.7a)
% = + • • • . (2-7b)
and so (2.6) is a fourth-order accurate tri diagonal system for th e solution of (2.2). Now we introduce an upwind param eter 7 into (2.6a) to give an altern ativ e form ula,
i( F i+ i+ 4 F i+ F i_ i) = ^ [( l-7 )C 7 i+ i+ 2 7 Î7 i-(l+ 7 )7 7 i_ i]. (2.8) Taylor series expansions here give the tru ncation error as
Fi = U',~ ^ C 7 (= ) - ÿ t / " + . • • , (2.9)
and so th e choice 7 = 0{h^) is necessary to m aintain fourth-order accuracy. For convenience, we use th e shift operator Ej which is defined as
E^fn = fn+j, j integer,
to express (2.6a) and (2.6b) as
P^{E)Fi^, =
1
[P
2
{E)
-
'yP4{E)]Ui.^,
(2.10a)
P3{E)Si-4 = ^ P 4( E )U i- 4, (2.10b)
where
Pi{E) = E^ + i E + 1, (2.11a)
P2(E) = E^ - I = {E + I ) { E - I ) , (2.11b)
P3{E) = E^ + 10Ê + I, (2.11c)
Pi{E ) = E^ - 2 E + I = { E - I f . (2.11d)
Using (2.6c) to elim inate Si from (2.10b) gives
P 2 {E )F i.i = F i i E ) — — Pî{E)
T hen (2.12) and (2.10a) lead to
= ^ [(2 + l L ) P , { E ) - PP^(E) - LP,{E)] U i.u (2.13)
where L = K h j 2 and (3 = CÀ^/6. Finally, su b stitu tio n of (2.13) into (2.10a) gives a five point formula:
[2P^{E)P^{E)+^LP^[E)P^{E)-I3P^{E)P^{E)
-LP2{E)P^{E)]Ui.2 = ^, (2.14)
whose characteristic equation is
2P i( r ) P4(r) + ')LP^[t)P^(t) - pPr{T)P^{v)
- LP2(r)P^{v) = 0. (2.15)
The quartic polynom ial (2.15) has four roots, which co n stitute th e solution of
(2.14). A nd we also know th a t r i and 7*2 are th e roots of th e characteristic equation of (2.2) and th a t and constitute th e exact solution. Therefore
we choose 7 to m ake or be a root of (2.15). In this way, we o b tain two calculation form ulae concerning th e upwind param eter 7:
and th en a series expansion shows th a t
+ 0((rife)=), (2.17a)
+ 0((r2ft)=). (2.1Tb)
Thus 7i = 0{ h^) and 72 = 0{h^) for fixed K and C.
To close th e system (2.8), (2.6b) and (2.6c), we need two additional boundary
equations. Here a Fade type of approxim ation is used:
U i — U i+ i + / i [ a P i + ( l — o : ) P i + i ] + — [ ( a — - )5'i + ( o i — - )5'j+i] = 0,
(2.18a)
or
- P , { E ) U i + h [ - a P s { E ) + E ] F i + ~ [ a P s { E ) - \ p , { E ) ] S i = 0,
where
Ps{E) = E - I , Pe{E) = E - \ - I , P7(E ) = 2 E L (2.19)
T he form ula is of fifth order when o:=0.5 and fourth order otherwise.
In order to upw ind the boundary relations, firstly, using (2.6c) to elim inate
Si from (2.18) and solving (2.18) for a gives
_ [P5( g ) + ^ P7(E)]Ui + [ ~ h E + f P r ( E ) ] F j
“ ZpP^{E)Ui + \ - h P ^ { E ) + hLP^{E)]Fi ■ ^
Secondly, su bstituting Ui = and 7 = 71 into (2.13) gives Finally, su bstitu tio n of (2.21) and Ui = into (2.20) leads to
-/i^(7e"^^[c/i(ri/i) + 5] + [(6 -5 L )e " ^ ^ -(6 + 8 T )+ T e -" ^ ^ ](e ^ ^ ^ -l) — h^C{e^^^ — l)[ch{rih)-\-b] + 12(e’‘^^ — l)[ch{rih) — Ls h{rih ) — 1]
I I
ai
Similarly, we have
— [ch(r2 /i) + 5] + [(6 — 5T)e^^^ — (6+ 8T) + (e^^^ — 1)
0L2
—h^C{e^^^ — 1 ) [ch{r2h) + 5] + 12(e’"2^ — 1 ) [ch{r2h) — Lsh[r2h) — 1]
( Z.ZZD I
W hen C = 0, 7i and cli coincide w ith th e optim al 7 and a obtained by C hristie in (C hristie, 1985), and th en 72 = 0, «2 = i.e. th e stan d ard com pact scheme is retrieved.
We call th e two com pact schemes corresponding to (71, oti) and (72, «2) “upw ind schemes (I) and (II)” respectively. It will be seen later th a t th ey produce
different behaviors.
The system (2.8), (2.6b) and (2.6c) is tri diagonal, and if th e Ui are given, it is easily solved for th e Fi and Si. If the Ui are unknowns th en ordering th e
unknowns as C/^, Fi and Si for each i gives a block tri diagonal system w ith 3
X 3 blocks. Here our interest is in im plicit com pact schemes. We use (2.6c) to
elim inate th e Si in (2.6b) and then order th e unknowns as Ui and Fi for each i to give a 2x2 block tri diagonal system.
^ h/ 2 = D [ h j 2 y are two successive m axim um errors then th e ra te p is estim ated
from
(2.23)
T he com puted rates agree closely w ith th e theoretical order of th e m ethods.
In T a b le 2.5 -2 .7 , some num erical results are presented to show th e extent of th e oscillations in the standard compact scheme (2.6) applied to (2.2) for a variety of K and C values, and th e num erical solutions from C hristie’s upw ind
scheme and our upw ind schemes (I) and (II) are also shown in th e tables. Here
th e relative error is defined as {u[xi) — Ui}lu(xi), from which oscillatory behavior
can be observed. From these tables, it is observed th a t for large K and sm all C
b o th C hristie’s scheme and scheme (I) significantly dam p out th e oscillation, b u t
scheme (I) is th e more accurate, while for small K and large C C hristie’s scheme
does not work well while scheme (II) does. Again, for th e case of nonoscillation
in th e solution of the stan d ard com pact scheme, th e upw ind scheme (I) or (II)
can also achieve a higher accuracy.
N
Nonupwind Christie’s Scheme (I) Scheme (II)
Error Rate Error Rate Error Rate Error Rate
10 3.05D-2 1.12D-2 9.12D-3 3.07D-2
20 2.93D-3 3.38 1.20D-3 3.22 1.03D-3 3.15 2.95D-3 3.38
40 2.27D-4 3.69 9.67D-5 3.63 8.51D-5 3.59 2.29D-4 3.69
80 1.57D-5 3.85 6.84D-6 3.82 6.11D-6 3.80 1.58D-5 3.85
160 1.03D-6 3.93 4.54D-7 3.91 4.09D-7 3.90 1.04D-6 3.93
320 6.63D-8 3.96 2.93D-8 3.96 2.64D-8 3.95 6.65D-8 3.97
Table 2.1: Convergence Rates for Maximum Error in F: Problem (2.2) with ÜT = 10 and C = 10.
The extension of th e above upwind com pact m ethods to tim e-dependent prob
lems is straightforw ard. The test problem here is
- K u ^ — C u = (x, t) G [0, l ] X [0, Oo),
n (0,t ) = 1, = 0, t > 0, u (x ,0) = 1, u ( l ,0) = 0, 0 < X < 1,
(2.24a)
(2.24b)
(2.24c)
where th e constants i/, K and C satisfy  = -f- 4i/(7 > 0. T he exact solution
of (2.24) can be found by th e m ethod of separation of variables (see A ppendix
u { x ,t)
f2X_^r2-ri{l-x) ^
Cn = Smru
I —x'ST^ • / \ _iiAôd±*!±â«iÉ.t
1-62" > Cnsin(n7ræ)'e 4^
,
n=l
a
where ri and V2 are defined as follows;
k + \ /a k - V X
n = ---- ;;---, ’’2 =
(2.25a)
(2.25b)
2u 2u (2.26)
Obviously, (2.24) has a steady solution, and when C is zero, (2.24) becomes th e
convection-diffusion problem th a t was dealt w ith by C hristie (1985).
For fixed x, (2.24a) is an ordinary differential equation and so th e application
of ^-m ethods for the ODE gives
A t = 6
+ ( ! - « )
dx^ dx
d‘^U^{x) ^ d U ^ x )
dx^ dx - CU^{x) (2.27)
where A t is th e tim e step, = n A t , and U^{x) is th e approxim ation to u{x,tn).
T he tru n catio n error is
(2.28)
Therefore this discretization in th e t-direction is of second-order accuracy ii 6 = ^
b u t first-order accuracy otherwise. (2.27) can be rew ritten as
_ ( C + C )u * { x ) = - c a " ( æ ) ,
dx^ dx
where C = ^ and
u'(x)
=eu’^+\x)
+(1
-e)ir{x).
T he in itial condition on (2.29a) is
U^{x) = u (0, ®) = 1, and th e b oundary conditions are
î/*(o) = dî/"+'(o) + (1 - g)cr(o) = 1,
17*(1) = flC;"+i(l) + (1 - B)U"{\) = 0,
(2.29a)
(2.29b)
(2.29c)
(2.29d)
since Î7*(0) = u (0 ,ti) = 1 and C/*(l) = u ( l , t i ) = 0 for any integer i. Therefore, at
each tim e step, com pact finite-difference schemes can be applied to th e boundary
value problem for th e ordinary differential equation (2.29) and so th e algorithm
applied earlier to (2.2) can be used j after slight am endm ent of this problem . In form ulae (2.16) and (2.22), we use K = K j v and C = C /f/, while and T2 are calculated w ith (2.26). Num erical results for this problem are displayed
on T a b le 2.8-2.1 0, The num erical behavior for this tim e-dependent problem is found to be th e same as th a t for problem (2.2).
The convergence rates given in T a b le 2 .2 were also obtained from (2.23). Values of Æ = 10, C = 10 and v = 1 were chosen and th e solutions were
com pared at t = 0.4, æ = 0.9. The mesh was reduced according to A t = h^.
Close agreem ent w ith th e theoretical order p = 4 was also found for this tim e-
dependent problem.
N
Steps M
Nonupwind Christie’s Scheme (I) Scheme (II)
Error Rate Error Rate Error Rate Error Rate
20 160 1.28D-5 7.87D-7 1.35D-6 1.30D-5
40 640 7.43D-7 4.11 5.90D-8 3.74 9.23D-8 3.87 7.46D-7 4.11
80 2560 4.41D-8 4.07 3.69D-9 4.00 5.89D-9 3.97 4.43D-8 4.07
160 10240 2.72D-9 4.02 2.3D-10 4.00 3.7D-10 3.99 2.73D-9 4.02
Table 2.2: Convergence Rates for (2.24) : Æ = 10, C = 10, %/ = l , u ( x , t ) , t = 0.4, x 0.9, At = h = 1/N, At -- OAfM.
N At M u(x,t) : X = 0.9, t = 0.4 Rates
80 160 320 640 6.25E-3 1.5625E-3 3.90625E-4 9.765625E-5 64 256 1024 4096 0.63214510669621 0.63214488298773 0.63214486844268 0.63214486749075 3.94 3.93
Table 2.3: Christie’s results: Convergence Rates for (2.24) with K = 10, C = 0, u
1, At = h = 1/N, At — 0.4/M.
O ur results for zero C are sim ilar to C hristie’s, b u t different. In p articu lar our
results for th e convergence rates { K = 10, C = 0, u = 1, t = 0.4) converge to th e
exact solution (2.25a,b); see A ppendix A and T a b le s 2.3 & 2 .4 . C h ristie’s agree
N A t M u{x,t) : X = 0.9, t = 0.4 Rates 80
160 320 640
6.25E-3 1.5625E-3 3.90625E-4 9.765625E-5
64 256 1024 4096
0.63213969086475 0.63214928653246 0.63214928793975 0.63214928794838
12.7 7.35
Table 2.4: Our results: Convergence Rates for (2.24) with K = 10, C = 0, u = 1, A t = h?, h = 1/N, A t = 0.4/M . The exact value of u(0.9,0.4) is 0.63214928794767 •••, which is obtained from (2.25); see Appendix A.
rates were calculated from
P = In
2In
Uh — Uh/2
Uh/2 — Uih/4j (2.30)
regardless of the known analytical solution (2.25). We also notice th a t th e con
vergence rates m ay vary considerably at finite N before tending to th e large N
K ,C Exact Nonupwind Christie’s Scheme (I) Scheme (II)
h X u{x) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.9950 0.695D-04 0.167D-06 0.280D-07 0.696D-04
0.2 0.9901 -0.542D-04 -0.726D-07 0.515D-07 -0.542D-04
i f = 20 0.3 0.9851 0.211D-03 0.528D-06 0.759D-07 0.211D-03
0.4 0.9802 -0.368D-03 -0.709D-06 0.998D-07 -0.368D-03
C = 1 0.5 0.9753 0.903D-03 0.199D-05 0.125D-06 0.903D-03
0.6 0.9702 -0.186D-02 -0.434D-05 0.147D-06 -0.186D-02
h = 0.1 0.7 0.9634 0.434D-02 0.662D-05 0.175D-06 0.434D-02
0.8 0.9436 -0.836D-02 -0.321D-04 0.192D-06 -0.836D-02
0.9 0.8280 0.304D-01 0.377D-05 0.232D-06 0.304D-01
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.304D-01 0.321D-04 0.232D-06 0.304D-01
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.9070 0.923D-02 -0.656D-03 -0.776D-03 0.937D-02
0.2 0.8226 -0.539D-02 -0.122D-02 -0.146D-02 -0.546D-02
K = 40 0.3 0.7461 0.206D-01 -0.183D-02 -0.217D-02 0.209D-01
0.4 0.6767 -0.261D-01 -0.236D-02 -0.286D-02 -0.264D-01
C = 40 0.5 0.6138 0.579D-01 -0.306D-02 -0.358D-02 0.587D-01
0.6 0.5567 -0.932D-01 -0.339D-02 -0.423D-02 -0.945D-01
h = 0.1 0.7 0.5049 0.18D+00 -0.455D-02 -0.504D-02 0.18D+00
0.8 0.4579 -0.31D+00 -0.395D-02 -0.550D-02 -0.32D+00
0.9 0.4091 0.56D+00 -0.109D-01 -0.677D-02 0.56D+00
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.56D+00 0.109D-01 0.677D-02 0.56D+00
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.9070 0.362D-08 0.536D-05 -O.lOlD-05 0.231D-09
0.2 0.8226 -0.376D-07 0.104D-04 -0.196D-05 -0.443D-07
K = 40 0.3 0.7461 -0.434D-06 0.153D-04 -0.300D-05 -0.445D-06
0.4 0.6767 -0.214D-05 0.204D-04 -0.392D-05 -0.216D-05
C = 40 0.5 0.6138 -0.114D-04 0.252D-04 -0.489D-05 -0.115D-04
0.6 0.5567 -0.603D-04 0.292D-04 -0.583D-05 -0.606D-04
h = 0.05 0.7 0.5049 -0.319D-03 0.288D-04 -0.681D-05 -0.320D-03
0.8 0.4579 -0.168D-02 0.245D-05 -0.775D-05 -0.168D-02
0.9 0.4091 -0.835D-02 -0.249D-03 -0.864D-05 -0.839D-02
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.299D-01 0.249D-03 0.942D-05 0.300D-01
K , C Exact Nonupwind Christie’s Scheme (I) Scheme (II)
h X u{x) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.9995 -0.67D+00 -0.734D-07 -0.726D-07 -0.21D+01
0.2 0.9990 0.891D-01 -0.151D-06 -0.153D-06 0.34D+00
K = 1Q2 0.3 0.9985 -0.83D+00 -0.256D-06 -0.246D-06 -0.26D+01
0.4 0.9980 0.29D+00 -0.251D-06 -0.289D-06 0.98D+00
C = 0.5 0.5 0.9975 -O.llD+01 -0.553D-06 -0.404D-06 -0.34D+01
0.6 0.9970 0.59D+00 0.109D-06 -0.469D-06 0.19D+01
h = Q.l 0.7 0.9965 -0.14D+01 -0.279D-05 -0.547D-06 -0.45D+01
0.8 0.9960 O.lOD+01 0.810D-05 -0.628D-06 0.33D+01
0.9 0.9955 -0.19D+01 -0.725D-04 -0.716D-06 -0.60D+01
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.19D+01 0.725D-04 0.716D-06 0.60D+01
0.0 1.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.40450 0.158D-02 0.161D-02 -0.678D-03 0.112D-07
0.2 0.16370 0.289D-02 0.290D-02 -0.112D-02 -0.275D-07
K = 2 0.3 0.06621 0.437D-02 0.439D-02 -0.171D-02 -0.134D-07
0.4 0.02678 0.573D-02 0.575D-02 -0.221D-02 -0.413D-07
C = 10^ 0.5 0.01083 0.717D-02 0.718D-02 -0.277D-02 -0.242D-06
0.6 0.00438 0.855D-02 0.857D-02 -0.329D-02 -0.115D-05
h = 0.1 0.7 0.00177 0.994D-02 0.996D-02 -0.385D-02 -0.994D-05
0.8 0.00071 0.112D-01 0.112D-01 -0.437D-02 -0.341D-04
0.9 0.00025 0.123D-01 0.123D-01 -0.622D-02 -0.438D-03
1.0 0.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.123D-01 0.123D-01 0.622D-02 0.438D-03
0.0 1.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.09861 0.23D+00 0.25D+00 -0.60D+00 0.146D-07
0.2 0.00972 0.23D+00 0.20D+00 -O.llD+01 0.322D-07
K = 20 0.3 0.96D-3 0.65D+00 0.71D+00 -0.24D+01 0.196D-07
0.4 0.95D-4 0.931D-01 -0.214D-01 -0.32D+01 0.342D-07
C = 10^ 0.5 0.93D-5 0.15D+01 0.18D+01 -0.62D+01 -0.307D-08
0.6 0.92D-6 -0.13D+01 -0.18D+01 -0.76D+01 0.686D-06
h = 0.1 0.7 0.91D-7 0.48D+01 0.60D+01 -0.15D+02 -0.217D-04
0.8 0.89D-8 -0.83D+01 -0.12D+02 -0.16D+02 0.713D-03
0.9 0.88D-9 0.32D+02 0.58D+02 -0.58D+02 -0.252D-01
1.0 0.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.32D+02 0.58D+02 0.58D+02 0.252D-01
K ,C Exact Nonupwind Christie’s Scheme (I) Scheme (II)
h X u{x) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
0.1 0.09861 0.210D-04 0.229D-04 -0.251D-04 0.146D-07
0.2 0.00972 0.418D-04 0.455D-04 -0.502D-04 0.322D-07
K = 20 0.3 0.00096 0.626D-04 0.680D-04 -0.754D-04 0.196D-07
0.4 0.95D-4 0.834D-04 0.906D-04 -O.lOlD-03 0.336D-07
C = 1 0^ 0.5 0.93D-5 0.104D-03 0.113D-03 -0.126D-03 0.170D-07
0.6 0.92D-6 0.125D-03 0.136D-03 -0.151D-03 0.255D-07
h = 0 . 0 1 0.7 0.91D-7 0.146D-03 0.158D-03 -0.176D-03 0.264D-07
0.8 0.89D-8 0.167D-03 0.181D-03 -0.201D-03 0.213D-07
0.9 0.88D-9 0.190D-03 0.200D-03 -0.230D-03 -O.llOD-06
1.0 0.00000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
Maximum 0.195D-03 0.212D-03 0.246D-03 0.510D-05
Table 2.7: Numerical Solution of (2.2) Using Compact Difference schemes. 0 = h
K ,C ,u Exact Nonupwind Christie’s Scheme (I) Scheme (II)
h, At, t X u(cc,<) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.0010 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
K = 102 0.1 1.0010 -0.13D+02 -0.490D-06 -0.489D-06 -0.13D+02
0.2 1.0020 0.400D-01 -0.986D-06 -0.986D-06 0.525D-01
C = - l 0.3 1.0030 -0.13D+02 -0.146D-05 -0.146D-05 -0.13D+02
0.4 1.0040 0.32D+00 -0.198D-05 -0.198D-05 0.33D+00
V —0.1 0.5 1.0050 -0.14D+02 -0.243D-05 -0.243D-05 -0.14D+02
0.6 1.0060 0.60D+00 -0.298D-05 -0.296D-05 0.61D+00
h = 0.1 0.7 1.0070 -0.14D+02 -0.320D-05 -0.341D-05 -0.14D+02
0.8 1.0080 0.89D+00 -0.577D-05 -0.393D-05 0.91D+00
At = 0.01 0.9 1.0090 -0.14D+02 0.161D-03 -0.441D-05 -0.14D+02
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = 1 Maximum 0.14D+02 0.161D-03 0.441D-05 0.14D+02
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
K — 20 0.1 0.9950 0.695D-04 0.167D-06 0.281D-07 0.696D-04
0.2 0.9901 -0.541D-04 -0.726D-07 0.515D-07 -0.542D-04
C = 1 0.3 0.9852 0.211D-03 0.526D-06 0.759D-07 0.211D-03
0.4 0.9802 -0.368D-03 -0.709D-06 0.998D-07 -0.368D-03
u = 1 0.5 0.9753 0.903D-03 0.199D-05 0.125D-06 0.903D-03
0.6 0.9702 -0.186D-02 -0.435D-05 0.147D-06 -0.186D-02
h —0.1 0.7 0.9634 0.434D-02 0.662D-05 0.175D-06 0.434D-02
0.8 0.9436 -0.836D-02 -0.321D-04 0.192D-06 -0.836D-02
At = 0.01 0.9 0.8280 0.304D-01 0.377D-05 0.232D-06 0.304D-01
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = 1 Maximum 0.304D-01 0.321D-04 0.232D-06 0.304D-01
Exact Nonupwind Christie’s Scheme (I) Scheme (II) /i, Af, t X u { x ^ t ) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
K = 1Q2 0.1 0.9995 -0.67D+00 -0.789D-07 -0.781D-07 -0.21D+01
0.2 0.9990 0.891D-01 -0.150D-06 -0.153D-06 0.34D+00
C = 0.5 0.3 0.9985 -0.83D+00 -0.238D-06 -0.228D-06 -0.26D+01
0.4 0.9980 0.29D+00 -0.264D-06 -0.303D-06 0.98D+00
u — 1 0.5 0.9975 -O.llD+01 -0.527D-06 -0.378D-06 -0.34D+01
0.6 0.9970 0.59D+00 0.126D-06 -0.452D-06 0.19D+01
h = 0.1 0.7 0.9965 -0.14D+01 -0.278D-05 -0.530D-06 -0.45D+01
0.8 0.9960 O.lOD+01 0.813D-05 -0.598D-06 0.33D+01
Af = 0.01 0.9 0.9955 -0.19D+01 -0.725D-04 -0.694D-06 -0.60D+01
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = 1 Maximum 0.19D+01 0.725D-04 0.694D-06 0.60D+01
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
K = 10^ 0.1 0.9995 -O.llD+02 -0.124D-06 -0.124D-06 -0.12D+02
0.2 0.9990 0.500D-01 -0.242D-06 -0.242D-06 0.483D-02
C = 0.5 0.3 0.9985 -0.12D+02 -0.372D-06 -0.372D-06 -0.12D+02
0.4 0.9980 0.32D+00 -0.481D-06 -0.482D-06 0.28D+00
u =0.1 0.5 0.9975 -0.12D+02 -0.622D-06 -0.621D-06 -0.12D+02
0.6 0.9970 0.59D+00 -0.712D-06 -0.724D-06 0.55D+00
h = 0.1 0.7 0.9965 -0.12D+02 -0.970D-06 -0.864D-06 -0.12D+02
0.8 0.9960 0.88D+00 -0.367D-07 -0.973D-06 0.85D+00
Af = 0.01 0.9 0.9955 -0.13D+02 -0.836D-04 -O.llOD-05 -0.13D+02
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = \ Maximum 0.13D+02 0.836D-04 O.llOD-05 0.13D+02
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00 i f = 40 0.1 0.9070 -0.666D-08 0.535D-05 -0.102D-05 -O.lOlD-07
0.2 0.8226 -0.660D-07 0.104D-04 -0.199D-05 -0.726D-07
C = 40 0.3 0.7461 -0.394D-06 0.154D-04 -0.296D-05 -0.405D-06
0.4 0.6767 -0.214D-05 0.204D-04 -0.392D-05 -0.216D-05
u = 1 0.5 0.6138 -0.114D-04 0.252D-04 -0.489D-05 -0.115D-04
0.6 0.5567 -0.603D-04 0.292D-04 -0.585D-05 -0.606D-04
/i = 0.05 0.7 0.5049 -0.319D-03 0.288D-04 -0.682D-05 -0.320D-03
0.8 0.4579 -0.168D-02 0.243D-05 -0.777D-05 -0.168D-02
Af = 0.01 0.9 0.4091 -0.835D-02 -0.249D-03 -0.866D-05 -0.839D-02
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = 1 Maximum 0.299D-01 0.249D-03 0.942D-05 0.300D-01
\-Exact Nonupwind Christie’s Scheme (I) Scheme (II)
h , At, t X u(x,t) Rel. Error Rel. Error Rel. Error Rel. Error
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
K = 20 0.1 0.0986 0.210D-04 0.229D-04 -0.251D-04 -0.211D-14
0.2 0.0097 0.418D-04 0.454D-04 -0.503D-04 -0.250D-14
C = 10% 0.3 0.0010 0.626D-04 0.680D-04 -0.754D-04 -0.362D-14
0.4 0.9D-4 0.834D-04 0.906D-04 -O.lOlD-03 0.158D-14
Ï/ = 1 0.5 0.9D-5 0.104D-03 0.113D-03 -0.126D-03 0.654D-14
0.6 0.9D-6 0.125D-03 0.136D-03 -0.151D-03 0.115D-13
= 0.01 0.7 0.9D-7 0.146D-03 0.158D-03 -0.176D-03 -0.567D-12
0.8 0.9D-8 0.167D-03 0.181D-03 -0.201D-03 -0.292D-09
At = 10"3 0.9 0.9D-9 0.187D-03 0.203D-03 -0.226D-03 -0.109D-06
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+00
t = 1 Maximum 0.195D-03 0.212D-03 0.246D-03 0.507D-05
0.0 1.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+OO
K = 1Q2 0.1 1.0010 -0.69D+00 -0.311D-06 -0.313D-06 -0.69D+00
0.2 1.0020 0.898D-01 -0.616D-06 -0.611D-06 0.899D-01
C = —1 0.3 1.0030 -0.85D+00 -0.892D-06 -0.912D-06 -0.85D+00
0.4 1.0040 0.29D+00 -0.129D-05 -0.121D-05 0.29D+00
V = 1 0.5 1.0050 -O.llD+01 -0.121D-05 -0.151D-05 -O.llD+01
0.6 1.0060 0.59D+00 -0.298D-05 -0.181D-05 0.59D+00
h = 0.1 0.7 1.0070 -0.15D+01 0.240D-05 -0.211D-05 -0.15D+01
0.8 1.0080 O.lOD+01 -0.199D-04 -0.240D-05 O.lOD+01
At = 0.01 0.9 1.0090 -0.20D+01 0.141D-03 -0.277D-05 -0.20D+01
1.0 0.0000 O.OOD+00 O.OOD+00 O.OOD+00 O.OOD+OO
t = 1 Maximum 0.20D+01 0.141D-03 0.277D-05 0.20D+01
2 .3
C o m p a ct D ifferen ce S ch em es for th e B u r g
e r s ’ e q u a tio n
In this section, we tu rn to the application of CDS to a nonlinear equation,
B urgers’ equation
- uiia: = Uf, { x ,t) E [fl, 6] X [0, + oo). (2.31) Divide th e interval [a, b]into N equal subintervals [xk, Xk+i] (A; = 0,1, - - ,iV — 1),
where = xq kh [k = 1,2, ••• ,iV — 1), and grid spacing
h = [h — a ) j N. In the tim e direction, th e tim e step is At and = nAt . T he tim e discretization using ^-m ethod leads to
i^Uxx uUx — 0 /\f. (2.32)
a t th e t = tn~\-OAt level. Therefore th e application of th e stan d ard CDS to (2.32)
yields a set of nonlinear equations
g(-fi+i + + Fi^i) = — (f/i+i — U i-i), (2.33a)
^ ('5 'i+ i + lO^i + S i- i ) = — {Ui+i — 2Ui + U i-i), (2.33b)
uS. - UiFi = (2.33c)
where U{, F{ and Si are the approxim ations of u{xi,t)jUx[xi,t) and Uxx{xi,t) at t = tn-{- 9A t , respectively.
Now we reconstruct (2.33a), i.e. the relationship between th e function and its
first derivative. F irst, define
C[u{x)] h] = a iu '{ x — h) a2u'{x) + clzu'(x + h)
- ^ [ - ( 1 + '^)u{x - h)-\- 2'yu{x) + (1 - 7)u(æ + h)]. (2.34) T hen Taylor expansion shows th a t
C[u{x)', h] = c iu ’[x) + C2hu"{x) + c^h?u^^\x)
where
Cl = OL\ 0L2 OL:^ — 1, (2.36a)
C2 = — a , + (2.36b)
C3 = - ( a i + 0:3) — - j (2.36c)
C4 = - (0:3 - 0!i) + (2.36d)
C5 = — («1 + 0:3) - (2.36e)
Letting ci = C2 = C3 = 0, we have
2 — 3^7 2 2 -|- 3'y . .
«3 = ^2 ' ^2 = - , o:, = , (2.37a)
and
=
m-Finally, th e third-order form ula associated w ith (2.34) is obtained,
^ [ ( 2 - 3 7 ) ^ ;- i+ 8 F i + ( 2 + 3 7 ) i^ i+ i] = ^ [ - { l + j ) U i . , + 2'yUi + { l-y )U i+ i] . (2.38)
In fact, when 7 = ± 1 , (2.38) becomes Tolstykh’s third-order nonsym m etric (non centred) com pact difference scheme, the application of which is involved in a
forward scheme ( 7 — —1) and a backward scheme ( 7 = 1). W hen 7 = 0, (2.38)
recovers th e fourth-order sym m etric ( centred )scheme (2.33a).
Now we rew rite (2.33) in a general form
1 1 1
^2+j^t+j — ^ ^ 2 ^2+j^i+ji (2.39a)
j = - i j = - i
Y^('S'i+i + lOS'i -f S i- i ) = — {Ui+i — 2Ui U i-i), (2.39b)
uSi - UiFi
=
(2.39c)
Here th e coeGicients in (2.39a) are related to i so th a t upw inding can be applied.
In detail, (2.39) could be any of th e following six schemes:
1. T olstykh’s third-order upwinding CDS:
7i = -s ig n { U l'), (2.40a)
= = = (2.40b)
This upwinding scheme is slightly different from Tolstykh’s original one
(Tolstykh, 1986), where a third-order form ula for U and S was adopted
instead of th e fourth-order form ula (2.39b),
2. The third-order forward CDS:
7i = - I j
, _ 5 , _ 2 , _ 1
12 ’ 3 ’ 12’
/
3{
=
0,
=
-
1, /
3* =
1.
(2.41a)
(2.41b)
(2.41c)
3. The third-order backward CDS:
- 12’ 3 ’ " 12 ’
01 = - 1 , 02 = 1, 03 =
0-(2.42a)
(2.42b)
(2.42c)
4. The fourth-order centered CDS:
7i = 0,
.. 1
6’ i
-
Ï ’01 = 02 = ^ ^ 0 3 = n '
i.e. th e stan dard CDS (2.33).
5. C h ristie’s upwinding CDS:
7i = 7 = coth(Jv) — — Jj
ch{2L) 4- 2
, _ 1 i _ 2 ■ _ 1 «1 g, «2 g, ^3 g,
1 -I- 'Y
=
-
9 2=
7,
-03=
ch(2L) + 5
1 - 7
(2.43a) (2.43b) (2.43c) (2.44a) (2.44b) (2.44c) (2.44d)
This is C hristie’s original version for B urgers’ equation. A pparently, th e
6. T he extended C hristie’s upwinding CDS: U^h
2 u ’ U^h
Li = (2.45a)
2
7i -= coth(i/i) - — ch{2Li^ T 2 ch{2Li) + 5
1
(2.45b)
<^2 — g ) ^3 ~ g ’ (2.45c)
= = = (2.45d)
In th e forthcom ing num erical experim ents, we will exam ine th e num erical
behavior of th e above schemes. Before th a t, th e basis of th e algorithm is described
as follows.
F irst, elim inating the 5^’s in (2.39b) using (2.39c) gives
R iU i-i + R2U i-\F i-i + R^Ui + 10722 Cft-Fj- + R\UiJf.\
+ 7 2 2 ( 7 , - R { U t i + lOUr + C^r+i) = 0, (2.46a)
where
/,2 /^2
72 = - -, 72i = 72—12, R2 — — , R3 = 1072+24. (2.46b)
1/{/ 1/
T hen th e system (2.39a) and (2.46a) is closed by th e boundary conditions
Uq — Ui + h[oiFo + (1 — q:)7^i] + h^[dQSo + di*?!] = 0, (2.47 a)
(7iv+/i[Q:FV_i+(l—o:)FV]+/i^[do<S’//_i+di»S'jv^] = 0, (2.47b)
or
?o(7o + QiUi + hpoFo + h [ l — ol-\ U\^F\
— 72(do(7j^ + diU^') = 0, (2.48a)
qoÜ N -i + 9i?7jv + h ( a H— ■ ^ U n - i ) F n - i + hp^Fj^
— R {d o U ^ _ i + d iU ^ ) = 0, (2.48b)
after elim inating 5"o, 5*1, S n - i , S n in (2.47) using (2.39c). Here
^0 = -^{oL — - ) , di = - ( a — - ) , (2.49a)
Ço — 1 T do72, q\ = —1 + di72, (2.49b)
Finally, elim inating Fq and in (2.39a) and (2.46a) yields a simplified nonlinear
system ,
— ■^(/5i + Di)Uo — — (/9g + D2)Ui + (cKg — Ds — D4Ui)Fi
— + 0:3 F2 + R { DzUq + DqUi ) = 0, (2.50a)
(^Ri — D7^Uq-{-[R3 — Ds)Ui-{- R2[—Dq-\-(^10 — Dio)Ui]Fi-\- R1U2
4 -7 Z 2 [/2 f2 -.R [(l-D n )(7 ^ + (1 0 -D i2 )[/r + C/r] = 0, (2.50b)
— ^U i-i-\-a \F i^ i — ^U i-\-o t2Fi — ^U n.i-\-a'2Fn.i = 0, (2.50c)
R iU i-i + R2U i-\Fi^i + RsUi + 10R2UiFi + R^Ui^i
+^2^7î+i-Fî+i — R{U^_^ + IOC/” + C/J]|_i), (2.50d)
2 = 2,3, • • • ^ N — 2,
Un-2-\-OLi ^Fn-2~ t { ^ 2 ^ + -^13)C/i\^-l+(q:^ ^ — D1 4 — Di5UN-i)F]sr-l
h h'
^ " b ^ i6)C/f\r4-^ ( ^ i7C/j}_2 + D igU ^) = 0, (2.50e) R l UN-2 + -ff2 C/N-2 Fn-2 + (R3 ~ Dig)UAT-l + R2 -^20 + (10 — D2 1 )UN-1 ] Fj^-i+ (i?i
-i^ 2 2 )c /N -i2 [c /jj_ 2 + (io -i)2 3 )c/;^ _ i+ (i-2 ?2 4 )c /;j]= o , (2.50f)
or
D {V ) = 0, (2.51)
where V = {U i,F i, C/2, F2, " • , C/at-i, FV _i)^, and
(2.52a)
Po Po
^ U o , Dg = (2.52c)
fipo Po
■- ^ U o , D i2 = ^ U o , (2.52d)
hpo hpo
a - a (2.52c)
Po
0=1 Adi
D:
ypo D,
D , = ^ U o , hpo
Adi
Dt
^10
—
C/q,
vpo N-l
F
D , 3 = " '
Pn N-l D Pn D 11 14 17
Pn J^Pn
D^s = (2.52f)
n _ -^290..
-^19 — T---hpN
-^22 — T Un^ hpN
T he Jacobian of (2.51) is
A l C2
B i A2 C3
a
D2 0 — — f/jv,
Pn
_
R2dof/23 — T ^ N , hpN
D2 1 = — Un,
VpN _ R2di f / 2 4 — "7 Un
-hpN
(2,52g)
(2.52h)
J {V ) = B i - i Ai C,i+l (2.53a)
A i =
Ai =
An-1 =
Bi =
C i =
B n - 3 A n - 2 C n- 1
B n - 2 A n - 1
~ h W2~^R^2) — B4Fi a \ — D3 — D4U1
R
3— Dq-\-R2{10 — Dio)Fi R2\—
Dg-\-(^10 — Dio)Ui]
h
f?3 + 10ff2f^t lOff] (fit
, i = 2 , ‘ - , N - 2 ,
(2.53b)
(2.53c)
^ —Di sFn- 1 0L2 ^ — D\/i — Di^Un-1
R3 ~ Dig + J?2( 10 — D2i)Fn-1 R2 [~f^20 + ( 10 ~ f^21 )îfiV-l]
/3Î+' _i+la h
Rl
T
R2F{ R2Ui
F,
CLi - 1
h
'"3
R l + R2F{ R2Üi
) ^ — Ij 2, • • • , iV — 2,
, i = 2,3, • • • ,iV - 1.
Therefore Newton iteration for (2.51) is of th e form
yk+ i ^ y k _
or
j ( y O ) ( y * = + i _ y & ) = - D { V ^ ) .
(2.53d)
(2.53e)
(2.53f)
(2.54)
(2.55)
A fter finishing th e Newton iteratio n at t = + 9A t level, th e values of U and F
ai t = tn+i are calculated by
= [ U i - ( l - $ ) u n / S ,
, i =l ,
2, - - -
, N -1
,=
[Fi- (1 -
e)F"]/e,,i = 1,2,• • • , JV- 1 .
(2.56a)
T he first test problem is th e so-called “Moving Wave Front Problem ” , i.e. th e
solution of (2,31) satisfying Dirichlet boundary conditions and in itial conditions
consistent w ith th e analytical solution defined by
u { x , t ) = 0.1v4 T 0 .5 5 T C A + 5 + C
where
A — exp
B = exp
C = exp
-0.05(a: - 0.5 + 4.95t)
-0 .2 5 (3 - 0.5 + 0.75t)
(2.57)
(2.58a)
(2.58b)
(2.58c)
This problem was studied in Leventhal (1982), Sincovec (1977) and A l-R abeh
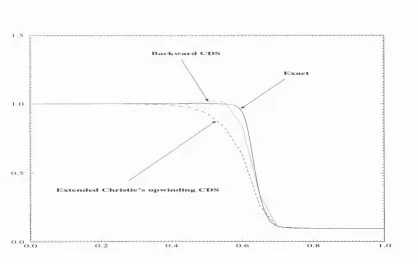
(1993). T he exact solution represents a moving wave front. T he steepness of th e
drop at th e front depends on v. The sm aller i> is th e steeper th e drop is, see
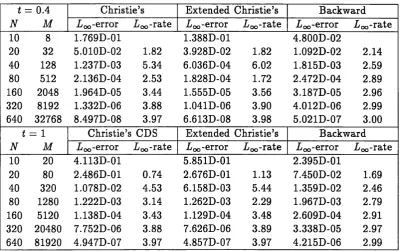
F ig u r e 2.1. Convergence results for v = 0.1 and 0.01 are given in T a b le 2.11
& 2 .1 2 , respectively, where Loo is defined as - 0.5(3 - 0.375)
Loo — m ax
u (2.59)
T a b le 2.1 1 shows th a t for a relatively m ild drop, u = 0.1, th e theoretical or
ders of accuracy are confirmed. Here Tolstykh’s third-order upw inding CDS is
equavelent to th e backward CDS, since u is positive in th e whole range. For a
steep drop, however, u = 0.01, T a b le 2.1 2 shows th a t for this singular p e rtu r
b atio n problem m ore mesh points are needed to m ain tain accuracy. G enerally
speaking, th e convergence property of C hristie’s upw inding CDS and th a t of the
extended C h ristie’s upw inding CDS is sim ilar, bu t they are quite different from
Tolstykh’s upw inding CDS, and th e la tte r has a b e tte r perform ance for relatively
large h [see T a b le 2.1 2 and F ig u r e s 2 .1 -2 .1 1], due to th e m onotonicity of th e
nonsym m etric scheme (see Tolstykh 1986). F ig u r e s 2 .1 -2 .1 1 show th e results
from th e centered, C hristie’s upwinding, th e extended C h ristie’s upw inding and
th e backw ard CDS for u = 0.003,0.001. The solutions by th e centered CDS
contain oscillations, and th e oscillations could persist for a certain range of de
creasing grid spacings, depending on th e values of u. B oth C hristie’s upwinding
and th e backw ard CDS can dam p the oscillations, b u t th e backw ard CDS shows
a b e tte r perform ance. There is not m uch difference in results betw een C h ristie’s