2017 3rd International Conference on Computer Science and Mechanical Automation (CSMA 2017) ISBN: 978-1-60595-506-3
Blind Spectrum Sensing Algorithm Based on Blind Signal
Separation in Cognitive Radar
Yuan-Yuan WEN
1, Xiao BAI
2, Lin BAI
3, She SHANG
4and Da-Wei SONG
5,*1,4,5National Key Laboratory of Space Microwave Technology,
China Academy of Space Technology (Xi’an), Xi’an China
2,3
China Academy of Space Technology (Xi’an), Xi’an China
Email:[email protected]
Keywords: Cognitive radar, Spectrum sensing, Blind signal separation, High-order statistics.
Abstract. In recent years, there has been a growing interest in the design and analysis of cognitive radar system. The spectrum sensing is the important component of the cognitive Radar. In this paper, a new blind spectrum sensing algorithm based on blind signal separation is proposed. Different from the traditional spectrum sensing technology such as energy detection, this paper utilizes the high-order statistics to separate the received signal of the cognitive Radar and takes high-order statistics as the statistical decision metric to formulate certain criteria to decide the existence of the primary user. Simulation results show that the proposed method enhances the detection performance especially when the cognitive radar is in operation in Cognitive radar system.
Introduction
Radar play an important role both in military and civil fields, which emit electromagnetic signal and receive the target echo from its power range, and extract the position, speed and other information from its echo. The idea of cognitive radio was proposed by J. Mittola in 2000[1].Cognitive Radar is the direction of the development of the radar in the future, which improves the detecting performance of the radar system by intelligently sensing the external electromagnetic environment, dynamically adjusting the system parameters and immediately feed backing the task execution results. In year 2007, the application of cognitive radar for remote sensing was described [2]. An important requirement is sensing of the spectrum holes by the cognitive radio. In particular, cognitive radar needs to monitor a large frequency band to detect the presence of other users and the availability of spectral holes for opportunistic transmissions[3]. Spectrum sensing is one of the key technologies of cognitive radar and used to detect the presence or absence of other users. In other words, Spectrum Sensing is the most important function that makes radar to be cognitive[4].
There are three primary methods of spectrum sensing such as energy detection (ED), cyclostationary detection and matched filter detection. These methods have different requirements and advantages/disadvantages[5]. The matched filter method requires perfect knowledge of the channel responses from the primary user to the receiver and accurate synchronization. Otherwise, its performance will be reduced dramatically[5]. The cyclostationary detection provides better detection accuracy but is computationally more complex and needs longer sensing time. The implementation and computational complexity of energy detection are relatively low, and can detect spectral opportunities quickly without the prior knowledge of the PU. But the energy detection also has many disadvantages, most prominently is that the detection performance of it will be damaged because of the noise uncertainty and low SNR, and cannot differentiate the primary user(PU) from cognitive user(CU) and the interference.
Gaussian random variables are always equal to zero, in spectrum sensing process the calculation of the high-order statistics of the received signal will not be influenced by the Gaussian noise and we can directly determine the existence of PU or not in the received signal. So in the spectrum sensing HOS is used as a statistical decision metric to decide the existence of PU or not can effectively overcome the effect of the Gaussian noise and improve spectrum sensing performance under very low SNR.
The rest of this paper is organized as follows. Section II gives the system model. Section III provides a description of the novel blind spectrum sensing algorithm. Section IV gives the simulation results. Section V provides the conclusions to this paper.
System Model
Cognitive radar(CR) is the secondary user of the channel, therefore, it can use the spectrum only when the primary user doesn’t use the spectrum and the spectral holes are present. This requires a cognitive radar to be equipped with a spectrum sensing function, which can detect primary users appearance and decide which portion of the spectrum is available[8].AssumeSPUdenotes the signal
transmitted from the PU, SCRdenotes the signal transmitted from the other CR and Xdenotes the received signal by spectrum sensing detector. The input-output relation is given as:
0: ( )l = ( )l
H X t w t (1)
1: ( )l = ( ) * ( )l l + ( )l
H X t H t S t w t (2)
where ( )=[ ( ), ( )]T
l PU l CR l
S t S t S t ,H t( )l denotes the channel gain, ( )w tl denotes the noise from the channel,l=1,,L denotes the observation sample sequence at the channel andL is the total number of samples are used for spectrum sensing purpose. H0denotes the signal is absent and H1 denotesthe signal is present. This model is based on the following assumptions.
AS1) We assume that the random variable ( )w tl is an additive complex white Gaussian noise
with zero mean and variance 2
w
σ i.e. ( ) ~ (0,σ2)
l w
w t cn , ( )w tl and ( )S tl are independent and identically
distributed (iid).
AS2) The channel gainH t( )l , the transmitted signal from the PUSPU( )tl , the transmitted signal
from the CRSCR( )tl , and ( )w tl are mutually statistically independent.
AS3) Let us assume that the channel is slowly changing in order to ensure the channel gain or frequency responses are constant during the sensing period. i.e., the channel is time invariant during the sensing period.
Spectrum Sensing Based on Blind Signal Separation
Blind signal separation(BSS) is a signal processing method. The concept of blind signal separation, as its name suggests, is to separate received signals with no, or very limited, prior knowledge about the source signals and the mixing channel. Some independent signals can be recovered from their linear mixtures through BSS. BSS needs to assume that the source signals are mutually statistically independent, and luckily, this condition is usually satisfied in radar systems. As we mentioned in system model, we can show the system equations by this matrix:
*
R=H S+w (3)
In this matrix equation,Rdenotes the received signal, Hdenotes the channel coefficient and S
denotes the source signals in BSS problem. Only the matrix R(as our observation) is known and the matrixHis estimated from the observation matrixR.Then we multiply the observation matrix by the inverse of estimated matrix Hand calculate the mutual independent estimated source signal. There are many methods to estimateHsuch as FastICA, MUK, TALS, COMFAC [9].
we use the HOS to separate the received signal of the CR and take HOS as the statistical decision metric to formulate certain criteria to decide the existence of the PU, and we call our proposed algorithm as HBSS (HOS blindly spectrum sensing algorithm). In the following, the HBSS will be detailed introduced.
The spectrum sensing problem is investigated by considering the following two scenarios. In the first scenario, suppose that the cognitive radar transmitter is in operation. In this scenario, one of the two independent components is an estimation of the CR and is strongly correlated with the other when the primary network signal is present. Therefore, we estimate the nongaussianity property of the two independent components to sense the absence or presence of the PU. In this case, if one of the two independent components has low nongaussianity property the PU is absent whereas if both of the two independent components have high nongaussianity property the PU is present. In the second scenario, suppose that the cognitive radar transmitter is not in operation. In this case, if both of the two independent components have low nongaussianity property the PU is absent whereas if one of the two independent components has high nongaussianity property the PU is present. The fourth-order cumulants can be used as a metric to decide the nongaussianity property of the two independent components and cumulants diagonalization can be used as a metric to separate the CR and the PU. So we propose the fourth-order cumulants metric to measure the nongaussianity property of the PU and the CR.
CR Transmitter is in Operation
When the CR transmitter is in operation, the nongaussianity property of the two independent components is not decided by the fourth-order cumulants of the observation signals. We will apply the diagonalization method to separate two independent components from two or more observation signals. After jointly diagonal zing the cumulants matrix and finding the best value for the separated matrix W, we get the separated signals.
1 2
( ) ( ) * ( )
( ) ( )
( )
=
=
l l l
l l
l
Y t W t R t
y t Y t
y t
(4)
Notice that we measure the nongaussianity property of the separated signals by the fourth-order cumulants metric. In the proposed detection algorithm, we compute two signal statistics q1andq2,
1 2
1 2
1 2
max{ , }
min{ , }
=
=
y y
y y
q Q Q
q Q Q
(5)
whereQ denotes the fourth-order cumulants.
When the PU signal is present, both signal statistics q1andq2have a large value. When no the PU signal is present, and one of the separated signals consists of noise only, signal statisticq2 will have a small value since the fourth-order cumulants of Gaussian noise is always equal to zero. Thus, we see that signal statisticq2 provides an estimate of the PU signal that is present in the separated signal. This is useful since it is desirable for a sensing algorithm to operate without requiring the knowledge of the noise variance. The rationorm q( ) /1 norm q( 2) is, thus, an indicator of the presence/absence of the PU signal in the separated signal. If norm q( )1 ≤γnorm q( 2), then the PU is present. γis the HBSS spectrum sensing method threshold and is chosen in such a way to satisfy the desired probability of false alarm with asymptotic value Pfa.
CR Transmitter is not in Operation
When the CR transmitter is not in operation, the nongaussianity property of the two independent components is directly decided by the fourth-order cumulants of the observation signals. As we mentioned in the previous section, we compute two signal statistics 1and
1 2
1 2
1 2
max{ , }
min{ , }
= = R R R R Q Q Q Q (6)
When the PU signal is present, signal statistic1 have a large value and 2
have a small value. When no the PU signal is present, both signal statistics 1and
2
will have a small value since the two separated signals consist of noise only. Thus, we see that signal statistic1 provides an estimate of the PU signal that is present in the received signal. Therefore we need some precise statistical tool for quantitative analysis of the distinctness between the primary signal and noise fourth-order cumulants. Through checking the significance of the largest cumulants1 by comparing it with the smallest one 2based on a threshold
, Θ
L M, we test the existence of a PU signal. That means if
1≥ Θ , 2
L M , then the PU is present. According to the results from random matrix theory
(RMT)[11], we can get that
1
, ,
, 2
(1 )
(1 )
β
ξ
µ
−
− +
Θ =
−
fa L M L M
L M
F P
M L (7)
where denotes the Tracy-Widom distribution function of orderβ (β=1,2 corresponds to real and complex-valued samples respectively). For real-valued samples the parameters are formulated by
2
, ( 1 2 1 2)
µ
= − + −L M L M L and
1 3 , , (1 1 2 1 1 2 )
ξ = µ − + −
L M L M L L M . M denotes the
number of the channel. For complex-valued observed samples, the definitions ofµ ,
L M, ξL M, are a bit
more complicated but still simple for numerical computation and details can be found in the literatures about RMT. In this paper, we consider that the observed samples are real-valued.
Results and Simulations
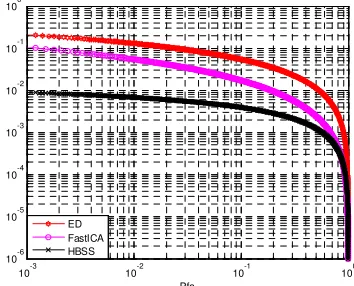
In this section, some simulation results are provided and compared with other classic methods. Detection performance of HBSS for each threshold may be characterized through complementary receiver operating characteristics (ROC) curves (plot of pmvs.pfa)[12]. The method with better
[image:4.612.215.392.519.662.2]detection performance has lower miss detection probability in fixed false alarm probability. The transmitted power in both PU and CR transmitter is normalized to one in this simulation. We can set SNR=5dB and compare the proposed spectrum sensing method with ED and Fast ICA.
Figure 1. The miss detection probability versus the false alarm probability, CR transmitter is not in operation.
In Fig.1 the CR transmitter is not in operation. It can be seen from the curve that in a fixed false alarm probability, HBSS method has lower miss detection probability. That is to say, HBSS method
10-3 10-2 10-1 100
has a better detection performance than ED and Fast ICA. But the advantage is not particularly obvious.
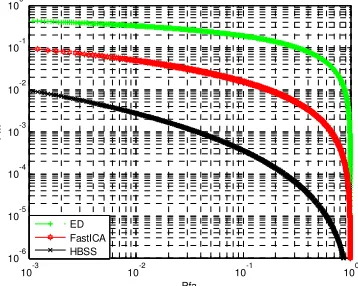
Figure 2. The miss detection probability versus the false alarm probability, CR transmitter is in operation.
In Fig.2 the cognitive transmitter is in operation. HBSS method and Fast ICA are applied to separate the PU and CU and further detect the PU. This simulation shows that HBSS method is much better than ED and Fast ICA.
As is shown in Fig.1 and Fig.2, the global probability of detection is enhanced by the proposed method. The ED needs to estimate noise power, so the noise uncertainty affects the noise power, performance of spectrum sensing is damaged. Since the high-order statistics of Gaussian random variables are always equal to zero, in spectrum sensing process the calculation of the HOS of the received signal will not be influenced by the Gaussian noise and we can directly determine the existence of PU or not in the received signal. So in the spectrum sensing HOS is used as a statistical decision metric to decide the existence of PU or not can effectively overcome the effect of the Gaussian noise and improve spectrum sensing performance under very low SNR. Therefore, HBSS method has good practicality without limitation in practical application.
Conclusions
Cognitive radar is intended to use spectral resources opportunistically and spectrum sensing is one of the main parts in each cognitive radar system. The detection performance of the method used to perform spectrum sensing is very important. The performance of cognitive radar system can be improved by employing the excellent spectrum sensing method.
In this paper, a blind spectrum sensing algorithm based on the high-order statistics is proposed for cognitive radar. The proposed method can overcome effect of noise uncertainty to statistical decision and does not require any information of source signal and the channel. Simulation results show that the proposed method improves the spectrum sensing detection performance especially when the CR and the PU are in operation simultaneously in Cognitive Radar.
References
[1]M. Tahir Mushtaq, Faran Awais Butt, and Ahmed Malik, “An overview of spectrum sensing in cognitive RADAR systems,” Microwaves. Radar and Remote Sensing Symposium, Kiev, Ukraine, vol. 11(3), pp. 115-118, (2014).
[2]Haykin S, “Cognitive dynamic systems,” IEEE International Conference on Acoustic, speech and signal processing, vol. 4, pp. IV. 1369-1372, Honolulu, HI (2007).
[3]Ali Koochakzadeh, Heng Qiao, and Piya Pal, “Compressive Spectrum Sensing with Spectral Priors for Cognitive Radar,”4th Int. Workshop on Compressed Sensing on Radar, Sonar, and Remote Sensing, vol. 9, pp. 100-104, (2016).
10-3 10-2 10-1 100
10-6 10-5 10-4 10-3 10-2 10-1 100
Pfa
P
m
[4]Pietro Stinco, Maria Greco, Fulvio Gini, and Mario La Manna, “Compressed spectrum sensing in cognitive RADAR systems,” IEEE International Conference on Acoustic, Speech and Signal Processing, vol. 4(14), pp. 81-85, (2014).
[5]Yi Zheng, Xianzhong Xie, and Lili Yang, “Cooperative spectrum sensing based on blind source separation for cognitive radio,”First International Conference on Future Information Networks, vol. 9, pp. 18-23, (2009).
[6]Zahid Saleem, Samir Al-Ghadhban, and Tareq Y. Al-Naffouri, “On the use of blind source separation for peak detection in spectrum sensing,” IEEE International Conference on Control System, Computing and Engineering, vol. 2(12), pp. 66-71, (2012).
[7]J. Ma and X. Zhang, “Blind source separation algorithm based on maximum signal noise ratio,” First International Conference on Intelligent Networks and Intelligent Systems, vol. 10, pp. 625-628, (2008).
[8]Pietro Stinco, M aria S. Greco, and Fulvio Gini, “Spectrum sensing and sharing for cognitiveradars,” The Institution of Engineering and Technology Radar, Sonar & Navigation, vol. 10, pp. 595-602, (2016).
[9]Siavash SadeghiIvrigh, Mohammad- Sajad Sadough, and Seyed Ali Ghorashi, “A blind source separation technique for spectrum sensing in cognitive radio networks based on kurtosis metric,” 1st International Conference on Computer and Knowledge Engineering, vol. 11,pp. 333-337, (2011).
[10]N. Tafaghodi Khajavi, S. Sadeghi, and S.M.-S. Sadough, “An improved blind spectrum sensing technique for cognitive radio systems,” 5th International Symposium on Telecommunications, vol. 10, pp. 13-17, (2010).
[11]S. Kritchman and B. Nadler, “Non-parametric detection of the number of signal: hypothesis testing and random matrix theory,” IEEE Trans. Signal Processing, vol.57, no.10, pp.3930-3941, (2009).