Volume 2011, Article ID 860326,15pages doi:10.1155/2011/860326
Research Article
The Stability Cone for a Matrix Delay
Difference Equation
M. M. Kipnis
1and V. V. Malygina
21Department of Mathematics, South Ural State University, Chelyabinsk 454080, Russia
2Department of Applied Mathematics and Mechanics, Perm State Technical University,
Perm 614990, Russia
Correspondence should be addressed to M. M. Kipnis,[email protected]
Received 22 December 2010; Accepted 20 March 2011
Academic Editor: Frank Werner
Copyrightq2011 M. M. Kipnis and V. V. Malygina. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
We construct a stability cone, which allows us to analyze the stability of the matrix delay difference equationxn Axn−1Bxn−k. We assume thatAandBarem×msimultaneously triangularizable
matrices. We constructmpoints inÊ
3which are functions of eigenvalues of matricesA,Bsuch
that the equation is asymptotically stable if and only if all the points lie inside the stability cone.
1. Introduction
Parameters of linear systems are subject to time changes. That is why in order to construct such systems it is desirable to know if they are not only stable but also able to estimate the distance of the system from the boundary of the stability region in the parameter space. Therefore, it makes sense to investigate the geometry of the subset of stable polynomials
in the space of characteristic polynomials of linear systems in the canonical space 1.
This idea has already been applied to the investigation of geometry of the subset of stable
polynomials in a two-dimensional subspace of the canonical space2,3, the stability simplex
for general difference equations4, connections of the convexity of the coefficients sequence
with stability of difference equations5, and stability ovals for matrix difference equations
of the formxnxn−1Bxn−kwith the delayk6.
Consider the matrix equation
xnAxn−1Bxn−k, n0,1,2. . ., 1.1
wherek ∈ is the delay. Equations of the form1.1have been used for investigations of
solution of1.1with commutative matricesA, Band nonsingularAis given in9. But9
does not solve the stability problems of1.1. The stability of1.1was investigated in7,8,
10,11with special 2×2 matricesA, B. In12, the stability of1.1was investigated without
any restriction on the dimension but with the special matrixAαI,α∈, 0 α 1, where
Iis the identity matrix.
In this paper we give a geometric solution to the problem of asymptotic stability of
1.1in any dimension with simultaneously triangularizable matricesA, B. It is known that
commuting matrices are simultaneously triangularizable13. As usual, we say that1.1is
stable if its zero solution is stable. Our solution is based on constructing the stability ovals which, in turn, form a stability cone. At the same time we give an algorithm for checking the stability of the scalar equation
xnaxn−1bxn−k, n0,1,2. . . 1.2
with complex coefficientsa, b.
The paper is organized as follows. In the second section, we recall the results on the
stability of the scalar equation1.2with real nonnegativeaand any realb14,15. Further
in that section we construct the stability oval for1.2with real nonnegative coefficientaand
complex coefficientb. In Section3, we consider a wider class of equations of the form1.2
witha, bbeing complex numbers. In Section4, we state a system of inequalities allowing us
to check the stability of the scalar equation1.2with two complex coefficients. In Section5,
we give a geometrical criterion for the asymptotic stability of matrix equation 1.1 with
simultaneously triangularizable matrices. Besides, we establish nongeometric necessary and
sufficient conditions for the stability of matrix equation 1.1 in terms of inequalities. In
Section6, we use the stability ovals and cones for analysis of some numerical examples.
2. The Stability Oval for
1.2
with Real Nonnegative
a
and Complex
b
We start by stating the results from14,15in the form which is suitable for us. Since the case
k1 is obvious, we consider only the casek >1.
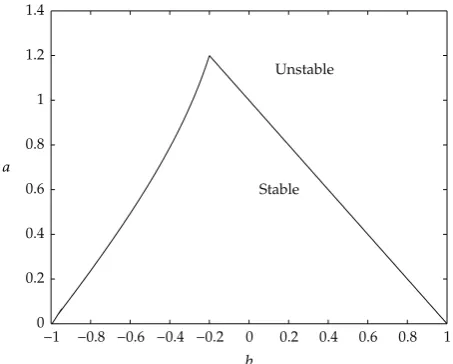
Theorem 2.1see14,15. In1.2letaandbbe real,a0,k >1.
1Ifak/k−1, then1.2is unstable.
2If 0 a < k/k−1, then1.2is asymptotically stable if and only if
−a21−2acosω
1< b <1−a, 2.1
whereω1 ∈0, π/kis the root of the equation
a sinkω
sink−1ω. 2.2
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 0
0.2 0.4 0.6 0.8 1 1.2 1.4
a
b
[image:3.600.186.413.97.279.2]Stable Unstable
Figure 1: The domain of asymptotic stability of1.2,a 0,k6.
Our first new result about the case of nonnegative realaand complexbin1.2is the
following.
Theorem 2.2. Leta0 be a real number andba complex number,k >1.
1Ifak/k−1, then1.2is unstable.
2If 0 a < k/k−1, then1.2is asymptotically stable if and only ifblies inside the oval
bounded by
bexpikω−aexpik−1ω, −ω1 ω ω1, 2.3
whereω1 ∈0, π/kis the root of2.2.
3If 0 a < k/k−1andbis outside of the stability oval2.3, then1.2is unstable.
4If 0 a < k/k−1andblies on the boundary2.3of the stability oval, then1.2is
stable (nonasymptotically).
Proof. We will use the D-decomposition method parameter plane method 16, 17. A
characteristic polynomial for1.2is the following:
fz zk−azk−1−b. 2.4
For any fixed value ofa, the complex plane of the parameterbis divided into some regions
by a curvefexpiω 0, that is,
Hence,D-decomposition occurs in the plane of the complex parameterbby means of a curve
bω expikω−aexpik−1ω, −π ω π. 2.6
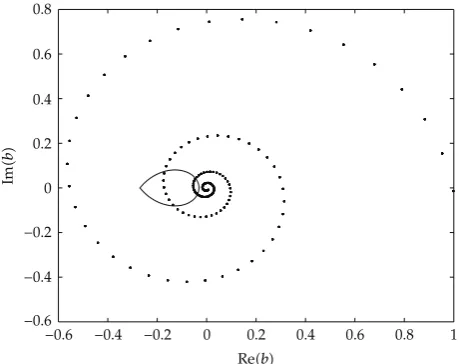
The example of theD-decomposition fork 6,a0.7 is shown in Figure2. From2.6we
obtain
|bω|21a2−2acosω. 2.7
Therefore, |b| increases monotonically when ω runs from 0 to π. Similarly, |b| increases
monotonically whenωruns from 0 to−π. Let us construct an increasing sequenceωiri0of
all valuesω∈0, π, such that Imbωi Imb−ωi 0. Here 1 r k,ω0 0,ωr π.
Each pair of the curves2.6formed by motionωon intervalsωi, ωi1,−ωi1,−ωicreates a
new region ofD-decomposition of the complex plane of parameterb. This region necessarily
contains some real values ofbas the function|bω|is monotone on0, πand on−π,0. Due
to the properties of the regions, if some inner point of this region is an asymptotically stable
point, then the whole region consists of asymptotically stable points. Ifak/k−1, then
according to Theorem2.1there are no stable points on the axis Imb 0. Hence, there are no
stable points on the complex plane of parameterb. Let nowa < k/k−1. Letω1 ∈0, π/k
be the root of 2.2. Then the unique D-decomposition region containing the real straight
line segment2.1is the oval with the boundary2.3. Parts 1–3 of Theorem2.2are proved.
Direct checking shows that the derivative of a characteristic polynomial2.4is not equal to
zero on the boundary of the stability oval. Therefore, when the parameterbruns along the
boundary of the stability oval, all the corresponding roots zof the characteristic equation,
satisfying |z| 1, are simple. Hence, 1.2 is stable nonasymptotically. Theorem 2.2 is
proved.
Example 2.3. Letk6 and, also,1a0.2,2a0.75, and3a1.1. Letb0.33 expiα,
0 α <2π. Let us analyze the asymptotic behavior of the solutions of1.2for all values of
α. We construct three stability ovals for three values ofaand also the circleb0.33 expiα
Figure3. Theorem2.2and Figure3give the following result.1Fora 0.2, the equation
is asymptotically stable for any value ofα.2Fora 0.75, the equation is asymptotically
stable for 2.0918∼ α0 < α < 2π −α0 ∼ 4.1914, it is unstable forα /∈ α0,2π−α0, and it is
stablenonasymptoticallyforαα0andα2π−α0.3Finally, fora1.1, the equation is
unstable for any value ofα.
Example 2.4. Let k 6 and, also, 1 a 0.2, 2 a 0.75, and 3 a 1.1. Let b
rexpi19π/20, r 0. Let us find the asymptotic behavior of 1.2 for all values of r.
We construct the beam b rexpi19π/20together with three stability ovals Figure3.
Theorem2.2and Figure3give the following result.
1For a 0.2, the equation is asymptotically stable for 0 r < r1 ∼ 0.8276, it is
unstable forr > r1, and it is stablenonasymptoticallyforr r1.
2For a 0.75, the equation is asymptotically stable for 0 r < r2 ∼ 0.4080, it is
unstable forr > r2, and it is stablenonasymptoticallyforr r2.
3Finally, fora 1.1, the equation is stable for 0.1063∼ r31 < r < r32 ∼ 0.1944, it is
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 −2
−1.5 −1 −0.5 0 0.5 1 1.5 2
Im
(
b
)
Re(b)
[image:5.600.185.415.98.281.2]O
Figure 2:D-decomposition of the complex plane of the parameterbfork6,a0.7.
Im
(
b
)
Re(b) O
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 −1
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
Figure 3: Stability ovals fork 6, a 0.2, anda 0.75; a 1.1. A circleb 0.33 expiαand a beam
brexpi19π/20are constructed for Examples2.3and2.4.
3. The Stability Cone for
1.2
with Complex Coefficients
The family of stability ovals depending ona∈ k/k−1forms a surface which we call the
stability cone.
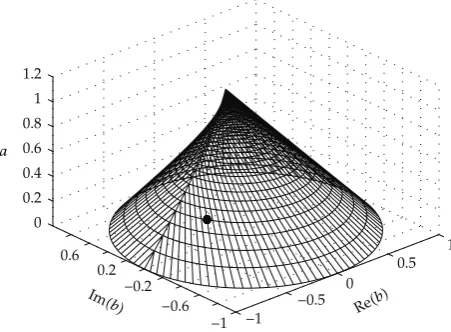
Definition 3.1. The stability cone for delay k is a surface in a three-dimensional space
Reb,Imb, zwith 0 z k/k−1, such that its intersection with any planez a0
[image:5.600.183.416.319.556.2]−1 −1 −0.6
−0.2 0.2 0.6 0 0.2 0.4 0.6 0.8 1 1.2
−0.5 0
0.5 1
a
Im(b
[image:6.600.186.412.99.265.2]) Re(b)
Figure 4: Stability cone fork6. The point on the cone is constructed for Example3.3.
The stability cone is the image of the two-dimensional domain in the spaceω, a
0 a sinkω
sink−1ω,
−πk ω π
k
3.1
under the mapping into
3 by the functions
Reb coskω−acosk−1ω,
Imb sinkω−asink−1ω,
za.
3.2
The stability cone fork6 is presented in Figure4.
Let us now study the problem of the stability of scalar equation1.2with complex
coefficientsa, b. We consider the equation
xnρ1expiα1xn−1ρ2expiα2xn−k, 3.3
with real nonnegativeρ1, ρ2and realα1,α2. We setxnynexpinα1. Then3.3becomes
ynρ1yn−1ρ2expiα2−kα1yn−k. 3.4
Obviously,3.4is stableasymptotically stableif and only if3.3is stableasymptotically
stable. The stability problem of3.4can be solved due to Theorem2.2. Thus, we obtain the
Theorem 3.2. Consider3.3. Put
aρ1, bρ2expiα2−kα1. 3.5
Construct the pointM Reb,Imb, ain
3.
1Equation3.3is asymptotically stable if and only if the pointMlies inside the cone3.2
(ifa0 andReb2 Imb2 <1, then the pointMis assumed to be the inner point
of the cone).
2If the pointMlies outside the cone3.2or on its top Reb −1/k−1, Imb
0, ak/k−1, then3.3is unstable.
3If the pointMlies on the boundary of a cone3.2, but not on its top, then3.3is stable
(nonasymptotically).
Example 3.3. Let us test the stability of the equation with complex coefficients
xnσexp
iπ
5
xn−10.7 exp
iπ
3
xn−k 3.6
with a real parameterσand a delayk6. Put firstσ0. By Theorem3.2, according to3.5
we calculate
b0.7 expiπ
3 −6·
π 5
0.7 expi17π
15
. 3.7
The vertical lineReb,Imb, σ,0 σ <∞in
3 intersects the boundary of the stability
cone atzσ0∼0.3442Figure4. To study the negative values ofσwe rewrite3.6:
xn−σexp
i6π
5
xn−10.7 exp
iπ
3
xn−k. 3.8
By Theorem3.2, according to3.5we calculate
b0.7 exp
i
π
3 −6·
6π 5 0.7 exp i17π 15 . 3.9
As the results3.9,3.7coincide, we obtain the following answer: 3.6is asymptotically
stable for−σ0< σ < σ0∼0.3442, and it is unstable forσ /∈−σ0, σ0. According to part 2 of
Theorem3.2forσσ0orσ−σ0,3.6is stablenonasymptotically.
Example 3.4. We test3.6with a real parameterσfor stability. Unlike the previous example
let now the delay be odd:k7. For positiveσby Theorem3.2, according to3.5we obtain
b0.7 exp
i
π
3 −7·
The vertical lineReb,Imb, σin
3 intersects the boundary of the stability cone atz
σ0∼0.3377. To study the negative values ofσsimilarly to the previous example, we obtain
b0.7 expiπ
3 −7·
6π 5
0.7 expi29π
15
. 3.11
The results3.10,3.11do not coincide. For3.11the vertical lineReb,Imb, σ,0 σ <
∞intersects the boundary of the stability cone atz σ1 ∼0.3002. We obtain the following
answer:3.6withk 7 is asymptotically stable if−0.3002∼ −σ1 < σ < σ0 ∼ 0.3377, it is
unstable ifσ /∈−σ1, σ0, and it is stablenonasymptoticallyforσσ0orσ−σ1.
Comparison of Examples3.3and3.4reveals the difference in the behavior of3.3for
even and odd values of the delayk. Let us compare the stability of1.1and the following
equations:
xn−Axn−1Bxn−k, 3.12
xn−Axn−1−Bxn−k. 3.13
Substitutingxn −1nynreduces1.1to
yn −Ayn−1 −1kByn−k. 3.14
Equations 1.1 and 3.14 are simultaneously stable or unstable. Therefore, we have the
following symmetry property of the stability region for1.1.
Theorem 3.5. For even delayskthe (asymptotic) stability of 1.1implies the (asymptotic) stability
of3.12and vice versa. For oddkthe (asymptotic) stability of1.1implies the (asymptotic) stability
of3.13and vice versa.
Similar properties of symmetry have been specified in11,15for the scalar equation
1.2with reala, b.
4. A System of Inequalities for Checking the Stability of
3.3
In the previous sections we used some geometric procedures. In this section we construct
a system of inequalities in order to check the stability of 3.3. Henceforth we assume 0
argz<2πfor a complex variablez.
Theorem 4.1.
1Ifρ1 <1−ρ2, then3.3is asymptotically stable.
2If 1−ρ2 ρ1 < min1ρ2, k/k−1, then for the asymptotic stability of 3.3it is
necessary and sufficient to fulfill simultaneously the following conditionsH1,H2:
ρ2<
ρ2
whereω1∈0, π/kis the root of the equation
ρ1
sinkω
sink−1ω,
π−argexpiα2−kα1< π−k−1arccos
1ρ2
1−ρ22
2ρ1 −arccos
1−ρ2
1−ρ22
2ρ1ρ2 .
H2
3Ifρ1 min1ρ2, k/k−1, then3.3is not asymptotically stable.
Proof. The stability of3.3is equivalent to the stability of3.4, so we will work with3.4.
1Forρ1<1−ρ2by Theorem2.2the stability oval exists and the circle of radiusρ2lies
completely inside the oval. Therefore, Theorem2.2implies the asymptotic stability
of3.4. Part 1 of Theorem is proved.
2Let 1−ρ2 ρ1 <min1æ2,k/k−1. Let us consider two cases.
Case 11−ρ2 ρ1<1. In this case, the stability oval exists by Theorem2.2, and the origin
of the coordinates lies inside the oval. For3.4to be asymptotically stable, it is necessary and
sufficient to satisfy the two following conditions. The first one is that the circle of radiusρ2
should intersect the stability oval. It is equivalent toH1. The second condition is that the
argument of a point expiα2−kα1should be between the arguments of the two crosspoints
M1, M2of a circle of radiusρ2with the stability oval2.3. Let us assume that ImM1> 0,
and let the parameterωcorrespond to the pointM1. We obtain
argM1 argexpikω−ρ1expik−1ω
k−1ωargexpiω−ρ1
4.1
from2.3. But we also obtain
cosω 1ρ
2
1−ρ22
2ρ1
4.2
from2.7. Equalities4.1,4.2give
argM1 k−1arccos1ρ21−ρ22
2ρ1
arccos1−ρ
2
1−ρ22
2ρ1ρ2
. 4.3
It follows from4.3that the second requirement is equivalent toH2. Part 2 of Theorem4.1
is proved in Case1.
Case 21 ρ1<min1ρ2, k/k−1. By virtue of the inequalityρ1< k/k−1, the stability
oval exists, and, sinceρ11, the origin does not lie inside the oval. The same requirements as
in the previous case lead to the same conditionsH1,H2. Part 2 of the Theorem is proved.
3Letρ1min1ρ2, k/k−1. We consider two cases.
Case 1 1 ρ2 ρ1 < k/k −1. In this case the stability oval exists by Theorem 2.2,
and, by virtue of the inequality ρ1 1, the origin does not lie inside the oval. Due to the
inequalityρ2 ρ1−1, no point of the circle of radiusρ2lies inside the oval and so3.4is not
Case 2ρ1k/k−1. In this case,3.4is unstable by Theorem2.2.
Theorem4.1is proved.
As we see, the text of Theorem4.1does not contain any geometric terms. However,
Theorem 3.2has a considerable advantage over Theorem4.1because of its simplicity and
geometric visualization. That is why in the future examples we prefer describing the stability
of matrix equation1.1in geometric terms.
5. The Stability Cone for the Matrix Equation with Simultaneously
Triangularizable Matrices
In this section we consider1.1with simultaneously triangularizable matricesA,B.
Theorem 5.1. LetA, B, S∈
m×m andS−1ASATandS−1BSBT, whereAT, BT are the lower
triangular matrices with elements, respectively,λjs, μjs1 j, s m. Let
bjμjjexpiargμjj−kargλjj, ajλjj 1 j m, 5.1
and let the pointsMjin
3 be constructed by
MjRebj,Imbj, aj 1 j m. 5.2
Then1.1is asymptotically stable if and only if for anyj 1 j mthe pointMjlies inside cone
3.2.
If for somej 1 j mthe pointMjlies outside cone3.2, then1.1is unstable.
Proof. In1.1we substitutexn Synand multiply the equation byS−1. We obtain
ynATyn−1BTyn−k 5.3
with lower triangular matrices AT, BT. By virtue of the nondegeneracy of matrix S, the
stability of5.3is equivalent to the stability of1.1. Let us assume thatyn yn1, . . . , ynmT.
The system5.3consists ofmscalar equations
ynjλjjyn−1j μjjyn−kj
j−1
s1
λjsyn−1s j−1
s1
μjsyn−ks 1 j m. 5.4
As usual, 0s1 0. Equation5.4is called exponentially stable if there are realC > 0, q ∈
0,1, such that for any solutionynjthe estimate
ynj Cqn max
−k u 1,1 s j
holds. The exponential stability is equivalent to the asymptotic stability for the equations under consideration. It is more convenient to prove the exponential stability. Let the points
5.2 1 j mlie inside the cone3.2. Due to Theorem3.2, all equations of the form
ynjλjjyn−1j μjjyn−kj 1 j m 5.6
are exponentially stable. Let us prove by induction onj that5.4are exponentially stable.
Forj 1,5.4coincides with5.6, so it is exponentially stable. Let, for anyr < j,5.4with
rinstead ofjbe exponentially stable. Then5.4is represented in the form
ynjλjjyn−1j μjjyn−kj gnj, 5.7
where|gnj|has an estimate of the form5.5by the induction assumption. Assuming zn
ynj, yn−1j, . . . , yn−kj T, we represent5.7in the form
znGzn−1hn, 5.8
whereG∈
k×k,Gis a stable matrix, and|hn|has an estimate of the form5.5. From5.8we
obtainznGnz0 nr1Gn−rhr, which implies the exponential stability of5.4. The induction
is finished, and asymptotic stability of1.1is proved.
Let us assume that some point5.2does not lie strictly inside the cone. Then, for the
initial data in5.4, we assume thaty−ns0 for anys, n, such that 1 s j, 1 n k. Thus,
5.4becomes5.6. If the point5.2lies on the cone boundary, then5.6has a trajectory
which does not tend to zero because the characteristic polynomial of5.6has a rootzsuch
that|z| 1. If some point5.2lies outside the cone, then by Theorem3.2the equation has
unlimited trajectories. Theorem5.1is proved.
Remark 5.2. If no points5.2lie outside the stability cone, but some of them lie on the cone
boundary, then1.1can be stablenonasymptoticallyor unstable.
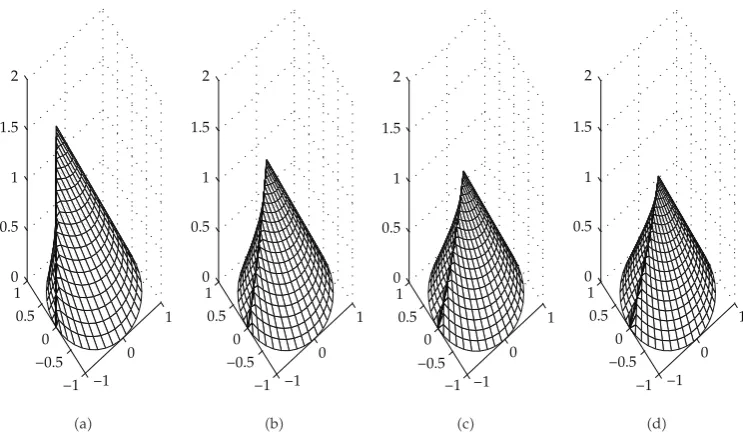
Remark 5.3. The stability conesFigure5are constructed for each delaykindependently of
the dimensionmin1.1. Ifk → ∞, then the intersection of all stability cones is the right
circular cone with the base radius 1 and the height 1. The interior of this cone is the “absolute stability domain,” that is, the stability domain for any delay.
The next theorem, which is the evident consequence of Theorems 4.1 and 5.1, will
establish the asymptotic stability criterion in the form of inequalities for matrix equation1.1.
Theorem 5.4. LetA, B, S∈
m×m andS−1ASATandS−1BSBT, whereAT, BT are the lower
triangular matrices with elementsλjs, μjs 1 j, s m, respectively. Let
−1 −1 0 1 0.5 1.5 2
−0.5 0 0
1
0.5 1
a −1 −1 0 1 0.5 1.5 2
−0.5 0 0
1
0.5 1
b −1 −1 0 1 0.5 1.5 2
−0.5 0 0
1
0.5 1
c −1 −1 0 1 0.5 1.5 2
−0.5 0 0
1
0.5 1
[image:12.600.113.485.94.313.2]d Figure 5: Stability cones fork2,3,4,5.
Construct a setAS⊆P {j∈ : 1 j m}by the following rules (cf. Theorem4.1).
1Ifρ1j<1−ρ2j, thenj ∈AS.
2If 1−ρ2j ρ1j<min1ρ2j, k/k−1, then forj∈ASit is necessary and sufficient to
fulfill simultaneously the following conditionsH1j,H2j:
ρ2j<
ρ2
1j1−2ρ1jcosω1j, H1j
whereω1j∈0, π/kis the root of the equation
ρ1j sinkω
sink−1ω,
π−arg
expiα2j−kα1j< π−k−1arccos1ρ
2
1j−ρ22j
2ρ1j −arccos
1−ρ2
1j−ρ22j
2ρ1jρ2j .
H2j
3Ifρ1jmin1ρ2j, k/k−1, thenj /∈AS.
Equation1.1is asymptotically stable if and only ifASP.
6. Examples of the Stability Oval and the Cone for Matrix Equations
Example 6.1. Consider the equation
−0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 −0.6
−0.4 −0.2 0 0.2 0.4 0.6 0.8
Im
(
b
)
[image:13.600.185.415.98.280.2]Re(b)
Figure 6: The stability oval and pointsMsfor Example6.1.
where
A
cosα −sinα
sinα cosα
, B
cosβ −sinβ
sinβ cosβ
6.2
withα0.0314,β0.1745. Let us find out for what values ofs∈ 6.1is stable. Matrices
A, Bare commuting; therefore, they are simultaneously triangularizable. The eigenvalues of
matricesA, Bareλ1,2 exp±0.0314iandμ1,2 exp±0.1745icorrespondingly. In Figure6
the stability oval is shown, which is the section of the stability cone3.2on the levelz
1.0309. By Theorem5.1we have to know whether the points
Ms 0.9680scos0.1745s−0.1884,0.9680ssin0.1745s−0.1884 6.3
lie inside the cone. Figure6illustrates that pointsMs enter the oval of stability twices
53, s87and leave it twices58, s94. The conclusion is that the system6.1,6.2is
stable for 53 s 58 and for 87 s 94 and is unstable for all the other values ofs.
Example 6.2. Consider the equation
xn 1
3A
sxn−1Axn−6, 6.4
where
A
0 1.0150
−1.0150 2.0300
−1 −0.5 0
0.5 1
−0.5 0 0
0.5
[image:14.600.186.415.103.280.2]0.5 1
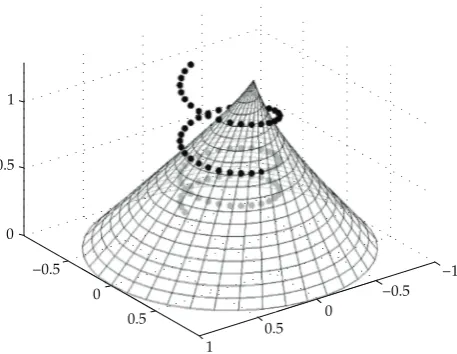
Figure 7: The stability cone and pointsMsfor Example6.2. Grey pointsMs1
s 49are located
inside the cone therefore6.4is stable. Dark pointsMss 50are located outside therefore 6.4is unstable.
Let us find out for what values of s ∈ 6.4 is stable. The eigenvalues of Aare
λ1,2 1.0150 exp±0.0374i. Stability ovals are symmetric about the real axis. Therefore, by
Theorem5.1, only points
Ms0.3383 cos0.03741−6s,0.3383 sin0.03741−6s,1.0150s
3
6.6
see Figure7should be checked. Figure7displays that pointsMsfor 1 s 49 are inside
the stability cone3.2and fors50 points are outside of the stability cone. The conclusion
is that6.4is stable for 1 s 49 and it is unstable fors50.
7. Conclusion
The stability analysis for1.1in
m can be reduced to the pole placement problem for a
polynomial of degreekm. Our geometric approach allows us to reduce the dimension. To use
the approach, we need to know the eigenvalues of A, B. This is the problem of finding the
roots of a polynomial of degreem. Using these eigenvalues, we get a finite sequence of points
in
3 such that their position with respect to the stability cone allows us to make a conclusion
about the stability of1.1.
In our future work we intend to analyze the stability of equationxn Axn−mBxn−k
with two delaysm, kwith simultaneously triangularizable matricesA, B. The scalar version
of this equation was examined in 2, 3, 18. The stability cone for the matrix differential
equation ˙xt Axt Bxt−τwas introduced in19.
Acknowledgment
References
1 A. T. Fam and J. S. Meditch, “A canonical parameter space for linear systems design,” IEEE
Transactions on Automatic Control, vol. 23, no. 3, pp. 454–458, 1978.
2 Y. P. Nikolaev, “The geometry of D-decomposition of a two-dimensional plane of arbitrary coefficients of the characteristic polynomial of a discrete system,” Automation and Remote Control, vol. 65, no. 12, pp. 1904–1914, 2004.
3 M. M. Kipnis and R. M. Nigmatulin, “Stability of trinomial linear difference equations with two delays,” Automation and Remote Control, vol. 65, pp. 1710–1723, 2004.
4 M. M. Kipnis and D. A. Komissarova, “A note on explicit stability conditions for autonomous higher order difference equations,” Journal of Difference Equations and Applications, vol. 13, no. 5, pp. 457–461,
2007.
5 V. M. Gilyazev and M. M. Kipnis, “Convexity of a sequence of coefficients and the stability of discrete systems,” Automation and Remote Control, vol. 70, pp. 1856–1861, 2009.
6 I. S. Levitskaya, “A note on the stability oval forxn1xnAxn−k,” Journal of Difference Equations and
Applications, vol. 11, no. 8, pp. 701–705, 2005.
7 S. Guo, X. Tang, and L. Huang, “Stability and bifurcation in a discrete system of two neurons with delays,” Nonlinear Analysis: Real World Applications, vol. 9, no. 4, pp. 1323–1335, 2008.
8 E. Kaslik and S. Balint, “Bifurcation analysis for a two-dimensional delayed discrete-time Hopfield neural network,” Chaos, Solitons & Fractals, vol. 34, no. 4, pp. 1245–1253, 2007.
9 J. Dibl´ık and D. Y. Khusainov, “Representation of solutions of discrete delayed systemxk1
AxkBxk−mfkwith commutative matrices,” Journal of Mathematical Analysis and Applications, vol. 318, no. 1, pp. 63–76, 2006.
10 H. Matsunaga, “Stability regions for a class of delay difference systems,” in Differences and Differential Equations, vol. 42 of Fields Institute Communications, pp. 273–283, American Mathematical Society,
Providence, RI, USA, 2004.
11 H. Matsunaga and C. Hajiri, “Exact stability sets for a linear difference system with diagonal delay,”
Journal of Mathematical Analysis and Applications, vol. 369, no. 2, pp. 616–622, 2010.
12 E. Kaslik, “Stability results for a class of difference systems with delay,” Advances in Difference Equations, vol. 2009, Article ID 938492, 13 pages, 2009.
13 R. Horn and C. Johnson, Matrix Theory, Cambridge University Press, Cambrige, UK, 1986.
14 S. A. Kuruklis, “The asymptotic stability ofxn1−axn bxn−k 0,” Journal of Mathematical
Analysis and Applications, vol. 188, no. 3, pp. 719–731, 1994.
15 V. G. Papanicolaou, “On the asymptotic stability of a class of linear difference equations,” Mathematics
Magazine, vol. 69, no. 1, pp. 34–43, 1996.
16 E. N. Gryazina and B. T. Polyak, “Stability regions in the parameter space: D-decomposition revisited,” Automatica, vol. 42, no. 1, pp. 13–26, 2006.
17 D. D. ˇSiljak, “Parameter space methods for robust control design: a guided tour,” IEEE Transactions on
Automatic Control, vol. 34, no. 7, pp. 674–688, 1989.
18 F. M. Dannan, “The asymptotic stability ofxnK axn bxn−1 0,” Journal of Difference Equations and Applications, vol. 10, no. 6, pp. 589–599, 2004.
Submit your manuscripts at
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014 in Engineering
Hindawi Publishing Corporation http://www.hindawi.com
Differential Equations
International Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Probability and Statistics Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex Analysis
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Optimization
Journal of Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Operations Research
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied Analysis Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporation http://www.hindawi.com Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Decision Sciences
Discrete Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014