Moving Object Detection using Temporal
Information in Surveillance System using
Matlab and ARM7 Processor
Mrunal Gaikwad1, Dr.U.B.Shinde2, Prof.K.M.Biradar3
PG Student, Dept. of Electronics &Tele-communication, CSMSS, Aurangabad, India 1 Professor, Dept. of Electronics & Tele-communication, CSMSS, Aurangabad, India 2 Professor, Dept. of Electronics & Tele-communication, CSMSS, Aurangabad, India 3
ABSTRACT: The detection of real time video and its application is important and challenging task in video surveillance system. This paper gives the detail idea about the automatic detection of moving object by using the temporal information method from the processing of image sequence from the capture video. This method is efficient in segmentation which is useful for real time video surveillance, object tracking and calculation of its properties like autocorrelation, energy, entropy, correlation, Homogeneity etc. By using the implementation of saliency map on the continuous symmetric frame the difference between the adjacent frames generate the full saliency map with higher saliency value .The final meantime gives saliency value generated for background. The calculation of threshold of area is done by the maximum entropy sum method. The Gaussian Mixture Method followed by the shadow is the common method used for extracting the foreground. This method is useful for removal of noise from the detected object .In the background noise is removed by using by pre-processing and Morphological processing.The final image is obtained by the implementation of Fuzzy logic. Then the basic function the detection of target is controlled by ARM7 controller which is used to display the presence of any moving object, human body or animal. Buzzer circuitry is implemented for security purpose. GSM modem provided the massages to the user about the detection of object .So in this proposed model we detect the moving object using the time domain information and different applications with different function are operated for security purpose using ARM 7 controller.
KEYWORDS: Frame difference, Fuzzy logic,moving object detection, temporal information, saliency map.
I. INTRODUCTION
Detecting moving objects have plays crucial role for researchers in the area of image processing domain. However, because the surroundings in the real-world the moving object detection is still a challenging problem. As indicated in paper [1], the three factors make section of object more difficult to from videos.(1) the complex background, e.g., dynamic background with swaying trees, (2) Motion of camera, e.g., tripod vibration, (3) the prior knowledge of background and foreground , e.g., for background data modelling .In addition to this the algorithms crated for the moving object detection are not efficient, intelligent or robust enough. So user interaction or experiential parameter tuning are needed. To remove this problems, we propose a motion detection method based on temporal information (TI), which is time based inspired by distribution-based algorithms which will also helpful for the addition of features.
The motion detection methods can be divided into three types, namely temporal-based, spatial-based, and combined approach. Motion plays the most reliable information in moving object detection so a mass of moving object detection methods are designed based on temporal information, such as frame difference [2][3] and background subtraction [4][5]. Frame difference method is simple, easy and can fast extracts moving objects. Background subtraction removes the background model from the input images. This is most common approach to detect moving objects.There are multiple of algorithms are developed for background modelling, such as GMM (Gaussian Mixture Model) [6], MRF (Markov Random Field) [7] and BBM (Bayesian background model) [8].
The spatial-based object detection method is applied to detection of object in static images and the results are usually not desirable as the lack of temporal information.
There are some researchers tried to combine the temporal and spatial information. An integration of the background model based on spatial and temporal features are presented by Y. Nonaka[9], S. Zhang[10] .In this method they consider the local binary patterns in the spatial domain and also in the temporal domain.The new online dynamic texture extraction operator is used to model the background. Y. Wu[11] then the combined saliency measurement with combination of spatial and temporal coherence is used to detect moving object. The combination of temporal and spatial information leads to enhance the saliency of the moving objects, but the low-level features, e.g., edges, colors, and textures are generally calculated with spatial saliency.
Our proposed method consists three major steps. 1) The generation of temporal saliency map based on the difference of the adjacent frames.2) calculate threshold adaptively using the maximum entropy sum method to binaries to the temporal saliency map and get the candidate effective areas. The salient points of each candidate area are selected which is called as the attention seeds. Finally, from each attention seed, modified fuzzy logic is performed on the saliency map until no points can be grouped and the contours of the moving objects are obtained. The various features such as autocorrelation, energy, entropy, correlation, homogeneity at different points are detected according to the moving object. The GLCM[Grey level co-occurrence matrix] technic is used for operation. The single is send to ARM7 board which gives the information to user by sending the text message about the moving object.
II. MOVING OBJECT DETECTION
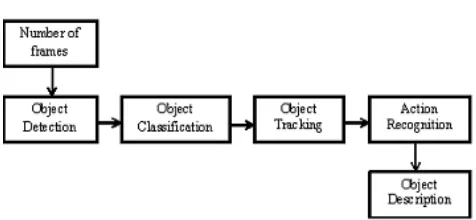
Fig 1.A basic framework for smart video processing algorithms.
Each application required different needs that benefit from smart video processing, thus each will requires different treatment. However, they have some common point: moving objects. Thus, the first basic step of almost every vision system is the detecting regions that correspond to moving objects such as people and vehicles in video. since it provides a focus of attention area and simplifies the processing on subsequent analysis steps for further calculation. Due to dynamic changes in natural scenes such as sudden illumination and weather changes, repetitive motions that cause clutter (tree leaves moving in blowing wind), motion detection is a difficult problem to process reliably. The background subtraction, statistical methods, temporal differencing are most frequently used techniques for moving object detection.
1. Motion Saliency Generation
Fig 2. Video frames (Top row), motion saliency maps(bottom row).
2. Attention Seeds Selection
The fixed cut threshold value is not useful for moving objects extraction based on saliency maps, because the grey levels of real-world images are constantly changing. The region growing algorithm has been applied on it, to find the best attention seeds. A reasonable seed should be the focus on the moving objects. For each point, the moving objects belongs to the higher the saliency value. The maximum entropy sum method is used which is based on the maximization of the information measure. This method is used to calculate an optimal threshold to binaries the saliency map and extract the candidate attention areas. After that, lastly we select the most salient location of each area as the attention seed. Fig. 3 shows the samples of the candidate attention areas(moving object) and the selected seeds, which are marked by highlighted red boxes.
Fig 3.Candidate attention areas(Top row) and (bottom row) foreground seeds of moving object.
III. Moving Object Detection
To grow the attention seeds to extract the moving objects motion we apply the fuzzy growing method. The modification of the membership function is done from the linear relationship to the trigonometric function relationship, according to (1) (2) . Fig. 4 shows the shapes of and its corresponding membership function ′ defined in [14],
where x denotes the gray level, α and are the variables that determine the shapes of the membership functions . The
probability of the grey levels that are closer to α decreases slowly and the probability of the grey levels that are closer to increases slowly, are more according with the human vision perception characteristics. denoted the background membership function.
=
1
sin −
− +
1
2 < < (1)
=
1
cos −
− +2 +
1
2 < < (2)
( , ) = arg min([ ( , )− ( , )] ) (3)
( , ) ( , )are the entropies of the fuzzy logic for forground and background areas.
Starting from each of the attention seeds, pixels will be grouped if their grey-levels satisfy the following condition.
, ≤ , > ℎ
Where th=( , )/2 for threshold function. Dark and low-contrast are the main characteristic of this generated motion saliency maps . To enhance the saliency map, histogram equalization is performed firstly. Figure 4 shows the result of fuzzy growing and the moving objects in the scene have been accurately detected and segmented. The maximum entropy sum method is more harsh than the fuzzy growing method, hence the threshold is much higher. The situation will be reversed when there are no moving objects.
Fig 4.Saliency binary graphs (Top row), Attention region detection results (Bottom row) for moving object.
III. BLOCK DIAGRAM OF PROPOSED SYSTEM
Fig 5.Block Diagram of the proposed system
IV. EXPERIMENTAL RESULTS
The hardware part is consisting of ARM7 processor with interfacing of camera.The SIM300 is the basic GSM modem interface with it for sending and receiving the massages, ‘Moving Object is detected’ for detected object on the LCD also. It also count the total number of object detected. The programing is done with help of the matlab by implementation of Fuzzy logic with features such as the autocorrelation, energy, entropy, correlation, Homogeneity etc.
Table 1
Homogen eity
Contras t
Dissimilarit y
Energy
0.0386 2.4034e +03
43.3195 2.3011e-04 0.0408 2.3944e
+03
43.1682 2.2627e-04 0.0471 2.2234e
+03
41.3979 2.4073e-04 0.033 2.2852e
+03
40.3780 2.2684e-04 0.0240 5.4428e
+03
67.8480 3.4014e-04 0.0189 4.9953e
+03
63.9865 0.0135 0.0311 988.968
8
31.3438 0.0313
Table 1:The values of special features of moving object.
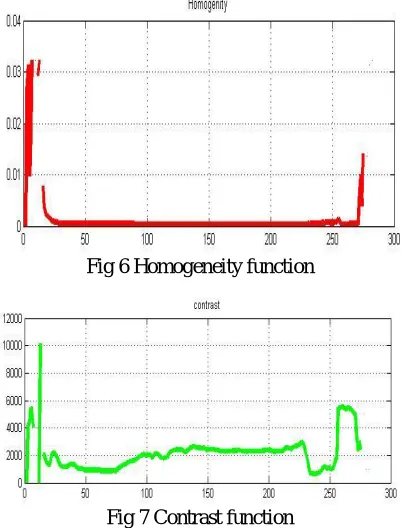
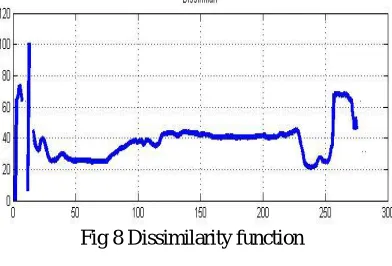
The valuesshows the variation in the particular ranges according to the movement of the captured video. The following are the basic graph used to represent the summation of each feature function for total video captured.The vales changes according to the function variation in object.
Fig 6 Homogeneity function
Fig 8 Dissimilarity function
V. CONCLUSION
The topic moving object detection method using temporal information in surveillance system with the application of features and implementation of hardware has been presented in this paper. We use the temporal information to generate the motion saliency map, in which the saliency of the moving objects that have obvious moving characteristics is enhanced while the saliency of the background is inhibited. The maximum entropy sum algorithm and the modified fuzzy growing method are applied to adaptively extract the ground truth of the moving objects. The proposed method does not require user interaction or parameter tuning as most of the preceding works did. The system detects moving objects with high accuracy and robustness. The proposed whole-body object tracking algorithm successfully tracks objects in consecutive frames.
The proposed algorithm is based on the frame difference. Another extension is to use the proposed approach for some consumer video applications in bank security systems. The system can be made more robust by incorporating different fire color spectrums and fusion of thermal images. These methods we presented for “smart” visual surveillance show promising results and can be both used as part of a real-time surveillance system or utilized as a base for more advanced research such as activity analysis in video.
The advanced technics such as GLCM (grey level co-occurrences matrix) is also implemented for improved features and accuracy.
ACKNOWLEDGMENT
I would like to express my gratitude towards my guide Dr.U.B.Shinde, who is principal of CSMSS, Aurangabad and Prof.K.M.Biradar, Professor CSMSS Aurangabad for time to time help and valuable guidance.
REFERENCES
[1] S. Sun, Y. Wang, F. Huang, and H. Liao, “Moving foreground object detection via robust SIFT trajectories,” J. Vis. Commun. Image Represent.
vol. 24, pp. 232–243, Apr. 2008.
[2] Y. Liu and G. Yan, “An adaptive detection model of moving dim targets based on energy difference between frames,” in Int. Conf.
SpaceInform. Technol., 2009
[3] C. Zhan, X. Duan, S. Xu, Z. Song, and M. Luo, “An improved moving object detection algorithm based on frame difference and edge
detection,” in 4th IEEEInt.Conf. Image and Graph., Aug. 2007, pp. 519 523.
[4] S. Yoshinaga, A. Shimada, H. Nagahara, and R. Taniguchi, “Background model based on intensity change similarity among pixels,” in the 19th
Japan-Korea Joint Workshop on Frontiers of CV, Jan. 2013, pp. 276–280.
[5] D. Park and H. Byun, “Object-wise multilayer background ordering for pubic area surveillance,” in IEEE Int. Conf. AVSS, Sep. 2009, pp. 484–
489.
[6] R. H. Evangelio, M. Pätzold, and T. Sikora, “Splitting gaussians in mixture models,” in Proc. 9th IEEE Int. Conf. Advanced Video
andSignal-Based Surveillance, Sep. 2012, pp. 300–305.
[7] Y. Tsaig and A. Averbuch, “A region-based MRF model for unsupervised segmentation of moving objects in image sequences,” in CVPR,
2001, pp. 889–896.
[8] F. Porikli and O. Tuzel, “Bayesian background modeling for foreground detection,” in Proc. ACM VSSN, Nov. 2005, pp. 55–58.
[9] Y. Nonaka, A. Shimada, H. Nagahara, and R. Taniguchi, “Evaluation report of integrated background modeling based on spatio-temporal
features,” in Proc. IEEE Comput. Soc. Conf. CVPR workshops, Jun. 2012, pp. 9–14.
[10] S. Zhang, H. Yao, and S. Liu, “Dynamic background modeling and subtraction using spatio-temporal local binary patterns,” in IEEE Int.Conf.
[11] Y. Wu, N. Zheng, Z. Yuan, H. Jiang, and T. Liu, “Detection of salient objects with focused attentionbased on spatial and temporal coherence,” Inform. Process. Technol., vol. 56, no. 10, pp. 1055–1062, Apr. 2011.
[12] H. Shen, S. Li, C. Zhu, H. Chang, and J. Zhang, “Moving object detection in aerial video based on spatiotemporal saliency,” Chin. J.
Aeronautics, vol. 26, no. 5, pp. 1211–1217, 2013.
[13] A. Belardinelli, F. Pirri, and A. Carbone, “Motion Saliency Maps from Spatiotemporal Filtering,” in 5th Int. Workshop on Attention in
CognitiveSyst., 2009, pp. 112 123.
[14] Y. Ma andH. Zhang, “Contrast-based image attention analysis by using fuzzy growing,” in Proc. 11th ACM Int. Conf. Multimedia, 2003,