AXE Operation & Maintenance Platform
Exchange Data
Ericsson Telecom AB 1996, Stockholm, SwedenAll rights reserved. No part of this document may be reproduced in any form without the written permission of the copyright holder.
PREFACE
Target Audience
This book is preliminary intended to be used as a course manual in the Ericsson Operation and Maintenance training program. The book is a training document and is not to be considered as a specification of any Ericsson language or system.
Identification
EN/LZT 101 105/2 R1A
Responsibility
Training Supply
Table of Contents
1. Introduction
3
1.1 Module Objectives . . . 3
1.2 General . . . 3
2. Device and Route Data
5
2.1 Route Concepts and Definition . . . 52.1.1 General . . . 5
2.1.2 Definition of Regional Processors . . . 5
2.1.3 Definition of Extension Modules . . . 9
2.1.4 Definition of Routes . . . 10
2.1.5 Connection of Devices to the Route . . . 14
2.1.6 Printout of Device and Route Data . . . 16
2.2 Supervision Data for Trunks. . . 19
2.2.1 General Principles of Supervision . . . 19
2.2.2 Blocking Supervision . . . 20
2.2.3 Disturbance Supervision of Devices . . . 23
2.2.4 Disturbance Supervision of Routes . . . 25
2.2.5 Seizure Quality Supervision of Devices. . . 26
2.2.6 Groups for Seizure Quality Supervision. . . 27
2.2.7 Seizure Supervision of Trunks . . . 28
2.3 Chapter Summary . . . 30
3. Connection to Group Switch
31
3.1 GSS in General . . . 313.1.1 Basic Functions, Hardware and Software. . . 31
3.1.2 Hardware Structure and Switching . . . 36
3.1.3 Control of the Switching. . . 39
3.1.4 Security . . . 42
3.1.5 Synchronization . . . 43
3.1.6 Printouts. . . 46
AXE 10, Operation & Maintenance, Platform
3.2.1 General . . . 48
3.2.2 Devices Connected to the Group Switch . . . 49
3.2.3 ETC (Exchange Terminal Circuit) . . . 49
3.2.4 PCD (Pulse Code Device) . . . 52
3.3 The SNT Concept . . . 53
3.3.1 Connection of SNT . . . 53
3.3.2 Connection of Devices to the SNT. . . 55
3.4 The DIP Concept . . . 57
3.5 Chapter Summary . . . 62
3.6 Appendix 1. . . 63
3.6.1 Channel Associated Signalling, CAS . . . 63
3.6.2 Common Channel Signalling, CCS . . . 64
3.6.3 Supervision of the PCM Line . . . 64
4. Size Alteration
67
4.1 Size Alteration . . . 674.1.1 Introduction . . . 67
4.1.2 Initial Setting . . . 68
4.1.3 Hardware Extension . . . 70
4.1.4 Extension by Using More Software Individuals . . . 71
4.1.5 What is a Data File? . . . 72
4.1.6 The Use of Size Alteration Events . . . 73
4.1.7 Commands Related to Size Alteration . . . 74
4.2 Chapter Summary . . . 76
5. Analysis
77
5.1 Analysis in General . . . 775.1.1 The Use of Operating and Non-Operating Area . . . 78
5.2 Branching. . . 80
5.3 Route Analysis. . . 81
5.3.1 The Sending Program . . . 83
5.3.2 The Commands Used to Define Routing Cases . . . 85
5.4 Charging Analysis . . . 86
5.4.1 Charging Principle . . . 86
5.4.2 Charging Method . . . 88
5.4.3 A Survey of the Charging Analysis . . . 89
5.4.4 Definition of Tariffs . . . 90
5.4.5 Definition of Tariff Class . . . 92
5.5.1 An Example of an Analysis Table. . . 97
5.5.2 A Study (Case) of an Outgoing Call. . . 99
5.5.3 A Study Case of an Internal Call . . . 103
5.5.4 Parameters in the Analysis Table. . . 103
5.5.5 Commands . . . 104
5.5.6 Pre-Analysis of B-numbers . . . 106
1. Introduction
1.1 Module Objectives
Figure 1.1
Module Objectives
1.2 General
This module is named Exchange Data, Basic. The subjects covered in this module are:
•
Route and Device Data•
Supervision Data for Trunks•
Group Switch Subsystem•
SNT and DIP Data•
Size Alteration•
Route Analysis•
Charging Analysis•
B-number Analysis.These subjects are based on AXE Local 12.3 for ordinary telephone calls. (Not for ISDN calls using ISDN services.)
Module Objectives
After completing this module the participant will be able to:
• Define various types of Routes in the exchange with Route Data as well as connected Devices.
• Load, print and change Supervision Data for Trunks.
• Briefly describe the Group Switch.
• Perform connection of SNT and DIP.
• Perform Size Alteration of data files in the Data Store.
• Understand the main principles of analysis.
2. Device and Route Data
Figure 2.1
Chapter Objectives
2.1 Route Concepts and Definition
2.1.1 General
To be able to set up a call between two exchanges you must have a route. In this route devices must be connected. All devices in an exchange must belong to an EM that are controlled by an RP-pair. This is the reason why we have to start with defining the Regional Processors (RP).
2.1.2 Definition of Regional Processors
If the exchange is extended with new hardware devices, new Regional Processors may be needed for the control of the new equipment. However, if some RPs have spare capacity (i.e. all EMs are not used), they can in some cases be used for the extension. Figure 2.2, on the next page, shows the parts of the system that are handled in this chapter.
Chapter Objectives
After completing this chapter the participant will be able to:
• Define a Regional Processor.
• Define an Extension Module.
• Define a new Route and modify existing Route Data.
• Connect Devices to Routes and generate and interpret printouts of the specified data.
Figure 2.2
The control part of the AXE system
First of all, the hardware of the RP pair must be connected and the power must be connected to the magazine. However, this is not enough as the RP pair must be defined in data as well. This means that some initial data is loaded into the system and that the parts that take care of the maintenance of the RPs are informed of their location. The location of the RP pair is marked by an address strap on one of the boards in the RP and that address must always be used when using commands related to the RP. The Opera-tional Instruction “Connection of RP” describes the actions required for the definition. The first command used for the definition of an RP pair is the EXRPI command.
EXRPI:RP=rp,RPT=rpt,TYPE=type;
The RP and RPT parameters are used to indicate to the system the
addresses allocated to the RPs with the address strap. The TYPE parameter is used to indicate the version of the RP as both old and new RPs can be used in the same exchange. The Command Description of the command EXRPI contains a list of valid RP types.
Device and Route Data
software and the regional software of the blocks connected to the RP (e.g. the regional software of block BT1 is referred to as BT1R).
The command used to define the RP programs to be loaded is EXRUI. This command will build up a table inside the APZ related to each RP pair. The table can be used by the APZ when reloading it, e.g. in connection with deblocking. Then the software indicated in the table is sent to the Pro-gram Store of the RPs in the RP pair. This also means that a copy of all regional software units must be available in the CP as a backup. When new equipment is installed in the exchange (e.g. a new type of BT devices), the new RP program must be loaded into the CP by means of command LAEUL.
The parameters included in the EXRUI command are RP and SUNAME or SUID. The RP parameter is used to indicate one of the RPs in the RP pair (only one has to be specified). The SUNAME and SUID parameters are used to indicate the name or the identity of the software units that should be included in the RP pair. Which parameter to use is determined as follows:
SUNAME This parameter is used if there is only one version of the software unit loaded in the CP. An example of a software unit name is BT1R.
SUID If there is more than one version of the RP program loaded into the CP, this parameter must be used to indicate which version to use. This parameter is used if the version of a Regional Software unit is changed because of soft-ware update or function change. An example of the parameter is “5/CAA1052105/1R2A02”. The correct identities can be printed by using command LAEUP.
Figure 2.3
Device and Route Data
When the data has been specified, the EXRPP command can be used to check it. Please study figure 2.4.
Figure 2.4
Answer printout of command EXRPP
All the data related to an RP pair can be removed by the EXRPE com-mand. This command is used if the RP pair is to be removed from the exchange.
2.1.3 Definition of Extension Modules
When the new RPs have been defined, it is time to define the equipment they should control. As you probably know, this equipment is located in Extension Modules using the same type of interface to the RPs. Figure 2.5 shows the principle of connecting two different types of EMs to the EM bus.
Figure 2.5
When the EMs are defined, the data in both the APZ and the blocks that own the hardware is updated with various types of information. The data in the block that controls the hardware is updated with information about the address of the hardware (RP and EM addresses). This information is required when sending signals to the hardware for initiating functions in the hardware.
The command used to define the EMs is EXEMI and the following param-eters are included for a normal definition:
EXEMI:RP=rp,RPT=rpt,EM=em,EQM=eqm;
RP: Indicates the RP that controls the EM in normal cases.
RPT: Indicates the stand-by RP. This RP must be the twin RP in an RP pair.
EM: Address of EM (an address strap is used).
EQM: Used to indicate the equipment type and identity of the devices in the EM. Example: EQM=BT1-32&&-63.
When the EM has been defined, it can be deblocked by command BLEME. This means that the EM is put into service from a control point of view. The devices in the EM are probably still blocked as more data related to the devices must be specified.
If an EM is to be removed from the exchange, command EXEME is used. When the data has been specified, the print command EXEMP can be used. Figure 2.6 shows an example of a printout of command EXEMP.
Figure 2.6
Answer printout of command EXEMP
2.1.4 Definition of Routes
Device and Route Data
There are basically three types of routes in the system:
1. External routes, e.g. routes to other exchanges
2. Internal routes, e.g. routes to Code Senders and Announcing Machines
3. Software routes, e.g. routes to subscriber services or routes for regis-ter individuals.
Figure 2.7 shows the three variants of the routes.
Figure 2.7
All the three types of routes require “Route Data” in order to function in a specified way. Route data is, as the name says, data related to a route in the exchange. Examples of route data for an external route is the type of sig-nalling system used, the function of the route (incoming or outgoing) and the number of devices connected to the route. The route data is stored in the block to which the hardware belongs. The Operational Instruction “Connection of route for BT” is one of the documents available that describes the commands that should be used. In this chapter, only the com-mands and the most common parameters are described. Supervision and connection of the devices to the Group Switch are handled in other parts of this Module.
How, then, is the route data defined in the exchange? The answer is the two commands EXROI and EXRBC. The two commands have the fol-lowing meaning:
•
EXROIThis command is used to initiate the route for the very first time. The parameters included in the command are (not all shown):
−
R, Route nameThis parameter gives the route a name consisting of up to 7 characters. Characters like #, % and + can be used in the route name to distinguish between incoming and outgoing routes.
−
DETY, Device typeThe device type indicates the type of devices used in the block. The parameter should be the same as the block name of the block used for the route (e.g. BT1).
−
FNC, Function CodeThe function code is used to indicate the function of the route. The meaning of the parameter must be fetched from the Appli-cation Information of the block indicated in DETY. For exter-nal routes, the parameter is usually used to indicate the traffic direction of the route.
•
EXRBCThis command is used when more route data is to be assigned to the route. Also existing routes can be changed by this command. The com-mand has several parameters of which only a few are explained here:
−
R1, Register Signalling RouteDevice and Route Data
Figure 2.8
Register signalling route
−
RG, Route GroupThe Route Group parameter is used to prevent the traffic from one exchange to be returned to the same exchange (also referred to as “return blocking”). By giving all routes to and from the same exchange the same RG value, the system will not route the traffic back to the same destination.
Please study figure 2.9.
−
RO, Origin for route analysisFor incoming routes, this parameter can be used if the Route Analysis should be made differently for this route compared with others. More about this in the Unit describing Route Analysis.
−
PRI, PrioritySome incoming routes can be given priority. This parameter can be used in various analyses in the exchange.
−
MB, Modification of B-numberThis parameter can be used to add or delete digits from the B-number.
As already mentioned, there are several other parameters included in the EXRBC command. For more details please study the Command Descrip-tion and the ApplicaDescrip-tion InformaDescrip-tion for the blocks concerned.
When all the route data has been specified for the route, and if the route should be put into service, it should be deblocked by using the BLORE command. Note that only outgoing routes can be blocked/deblocked. The command BLORP can be used to check if any outgoing route is blocked in the exchange.
2.1.5 Connection of Devices to the Route
When all the route data has been specified, it is time to connect devices to the route. However, before this is done, the devices should be connected to the Group Switch. How that is done is described in Unit 3 of this Module.
Before this step is started, the route has been properly defined by means of EXROI and EXRBC. However, no devices are connected to the route. The EXDRI command is used to make a connection in data between the devices and the route:
EXDRI:DEV=dev,R=r;
In case of ISDN services special devices are required, but this is not the case for ordinary telephone calls.
Device and Route Data
Figure 2.10
The effect of command EXDRI in the data of a block
When all the devices have been connected to the route, they should be taken into service by using the command EXDAI. This command will change the state of the devices from “Pre-post service” to “service”.
Finally, the devices can be deblocked by using command BLODE. That will enable the system to use the devices in traffic handling.
2.1.6 Printout of Device and Route Data
When the data has been defined, and also during the definition, the data loaded can be printed by using print commands. Some of the most useful commands are shown below.
EXDEP, please study figure 2.11.
Figure 2.11
Printout of device data
EXDRP, please study figure 2.12.
Figure 2.12
Device and Route Data
STRSP, please study figure 2.13.
Figure 2.13
Printout of device state survey
STRDP, please study figure 2.14.
Figure 2.14
EXROP, please study figure 2.15.
Figure 2.15
Device and Route Data
2.2 Supervision Data for Trunks
2.2.1 General Principles of Supervision
Telephony devices interwork with their environment, such as subscribers, other exchanges and transmission equipment. A single disturbance in one device does not mean that the device is faulty. The disturbance might come from the environment. For that reason, the supervision of telephony devices is rather a slow process. Several calls causing disturbances will in many cases have to be registered before any actions are taken by the sys-tem. In some cases, the supervisory period will cover several days.
The actual supervision of the devices is performed by the blocks that own the hardware. As an example, disturbances in devices belonging to block BT1 are also registered in that block. Disturbances are registered by means of counters in the software. In some cases, the counters are common to one route and in others, there is one disturbance counter per device.
The errors that are to step the disturbance counter are to a great extent determined by the protocol of the signalling system. Any abnormal event such as time out, signalling errors and state error, are registered in the dis-turbance counter.
When should an alarm be initiated and what alarm class should be used? Is the supervision activated or not? These types of questions are usually han-dled by blocks specially dedicated to the administration of the supervisory functions. These blocks are located in the OMS, Operation and Mainte-nance Subsystem, and they handle functions such as:
•
changing of alarm levels•
changing of alarm classes•
activation and deactivation of the supervision•
handling of commands and printouts.Figure 2.16
General principle of supervision of telephony devices
2.2.2 Blocking Supervision
Device and Route Data
Figure 2.17
Alarm limits in the blocking supervision, example
The Blocking Supervision is always initiated per route and all commands and printouts are related to a given route in the exchange. The function can be used to supervise routes belonging to blocks of type BT, AS, CR, CS and KR.
If no data has been specified for a route, e.g. the route has just been initi-ated, new supervision data will have to be loaded by means of the BLURC command. The parameters in the command are:
R=r,LVB=lvb1[&lvb2][&lvb3],ACL=acl;
The “R” parameter indicates the name of the route (the same as in
BLURC:R=ALPHA,LVB=10&20&30,ACL=A3;
If this command is used, the system will initiate the following alarms:
A3 alarm: if the number of blocked devices is between 10 and 20.
A2 alarm: if the number of blocked devices is between 20 and 30.
A1 alarm: if the number of blocked devices exceeds 30.
The blocking supervision of a route can be temporarily disconnected dur-ing maintenance activities or other changes related to the route. It is also possible to disconnect the blocking supervision permanently. The com-mands used to disconnect and reconnect the blocking supervision are:
BLURE:R=r[,PERM]; BLURI:R=r;
The BLURE command is used to disconnect the supervision. If the “PERM” parameter is used, the supervision is permanently disconnected. This means that the supervision data is erased. When the supervision is to be connected again, the BLURI command is to be used.
The supervision data can be printed by using command BLURP. An example of the printout generated can be seen in figure 2.18.
Figure 2.18
Device and Route Data
2.2.3 Disturbance Supervision of Devices
This function supervises that the proportion of the number of disturbances to the number of selections will not exceed a preset value. The supervision is used to supervise individual devices of type CS, CR and some variants of BT (not all types of BT can have this type of disturbance supervision). In case of analogue CS and CR devices, they are blocked if a number of consecutive disturbances are detected.
Disturbances are defined as disconnections not caused by the subscriber or not allowed traffic cases. Examples are time out, not valid signals and abnormal states in the signalling.
When a new route is defined which should have this type of supervision, the data must be loaded by means of command DUIAC. The parameters included in the command are:
DUIAC:R=r,ADL=adl,ACL=acl;
Parameter “R” indicates the name of the route concerned. Parameter “ADL”, Allowed Disturbance Level, indicates the level in percent. If this level is reached, an alarm with the alarm class according to parameter “ACL” will be generated. The possible values in ADL are 1, 2, 4, 5, 10, 20, 25, 33 and 50%.
Figure 2.19
The use of a disturbance counter
For each seizure of the device, the counter is decremented by one. In case of a disturbance, the counter is incremented by a value dependent on the parameter ADL, Allowed Disturbance Level.
Device and Route Data
Figure 2.20
The printout of the Disturbance Supervision of Individual Devices, example
2.2.4 Disturbance Supervision of Routes
This function is very similar to the one described in the previous chapter. The only major difference is that this function supervises the disturbance level of each route, not individual devices. The function is implemented in block DISSR and the routes that can be supervised are the ones of type BT. The function uses a disturbance counter like the one described in figure 2.19, with the only difference that there is one counter per route.
When a new route has been introduced in the exchange, or if some existing data should be changed, command DUDAC shall be used. The parameters included in the command are:
DUDAC:R=r,ADL=adl,ACL=acl;
When the data has been loaded, it can be printed by using the print com-mand DUDAP. Figure 2.21 shows an example of such a printout.
Figure 2.21
Printout using command DUDAP
2.2.5 Seizure Quality Supervision of Devices
This function is used to supervise the ratio (quotient) of the number of sei-zures to the number of normal calls. What, then, is meant by “normal call”? This is nothing but a time (usually set to 60 seconds) specified by command which is used to indicate a minimum duration of a normal call. This function utilizes the fact that subscribers connected to bad lines, replace earlier than if they were connected to normal lines.
The average quotient is also calculated for the devices in the same route, and each device in the route is compared with this value. If any of the devices deviates more than a command specified value, an alarm will be initiated. Two limits are used by the function:
•
one limit which indicates that the device is suspected of being faulty•
one level which indicates that the device should be blocked.When the function is started the very first time, i.e. when the exchange is installed, the time for a “normal call” is loaded. This is done by using the command SEQAC. This command can also be used when time is changed if other conversation times are used in the exchange (can be detected by means of Traffic Recording). An example of how the time is changed is:
SEQAC:CTIME=55;
Device and Route Data
If the supervision is to be initiated for a new defined route in the exchange, the same command is also used to load the supervision data related to the function. An example of the command is:
SEQAC:R=BTOWN+,ACL=A3,QUOS=30,QUOB=60;
If this command is used, the supervision will be initiated for the route “BTOWN+”. If any abnormal devices are detected, an A3 alarm will be generated. If a device deviates by more than 30% from the average quo-tient, the device is suspected of being faulty. In that case, the device is still in traffic (only fault marked). If a device deviates by more than 60% from the average quotient, it will be blocked.
The data specified for a route can be printed by using command SEQAP. Figure 2.22 shows an example of a printout generated by command SEQAP.
Figure 2.22
Example of printout related to Seizure Quality Supervision
2.2.6 Groups for Seizure Quality Supervision
The Seizure Quality Supervision function uses the routes as groups if nothing is indicated to the system. If there are requirements that new groups should be defined, command SEQGI can be used to group routes together. This means that the average quotient (Q) will be calculated for the whole group. Different types of routes with different characteristics can be grouped together with this function. Command SEQGI has only one parameter:
SEQGI:R=r....;
Figure 2.23
A printout of route groups
If changes should be made in any route group, the command SEQGC will be used. The command can either remove one or several routes from a route group, or it can be used to split a route group. The parameters included in the command are:
SEQGC:R=r...[,ALL];
If only the “R” parameter is used, the specified route(s) will be removed from the route group. If the “ALL” parameter is included as well, the whole route group will be split up.
2.2.7 Seizure Supervision of Trunks
Most of the supervisory functions studied so far, uses live traffic for their supervision. In order to detect errors for lines not having any traffic at all, or for lines which are continuously busy, the Seizure Supervision function is used (implemented in block SETS).
The principle of the function is to check that all lines in a route have been selected at least once during a specified period. A seizure is registered when a B-answer is received. If no seizures are registered during the period, an alarm will be generated.
The command used to load and change the data related to the function is:
SETAC:PL=pl,ACL=acl;
Device and Route Data
When the data has been specified, it can be printed by means of command SETAP. Please study figure 2.24.
Figure 2.24
2.3 Chapter Summary
•
Regional Processors (RPs) always work in a pair.•
An RP pair can maximum control 16 Extension Modules (EMs).•
An EM is a magazine which contains a number of devices of the same type.•
A route is a group of devices having the same characteristics.•
A route can be going between exchanges or internal or be a software route.•
An AXE 10 exchange has built in supervision.•
Blocking Supervision monitors the number of blocked devices on aroute.
•
Disturbance Supervision monitors line and register signalling qualityon routes.
•
Seizure Supervision monitors routes to detect devices which are eithernever seized or permanently seized in a preset supervision period.
•
Seizure Quality Supervision monitors the number of calls of short3. Connection to Group Switch
Figure 3.1
Chapter Objectives
3.1 GSS in General
The Group Switching Subsystem, GSS, belongs to the APT and contains both hardware and software. As its main task GSS connects an incoming channel to an outgoing channel.
As GSS is designed to work with different transmission media and sys-tems, it is possible to have PCM links as well as analog links. This enables GSS to connect digital lines from Remote Subscriber Stages, RSS, or other switches. This is done via an ETC (Exchange Terminal Circuit) for digital links, or via PCD (Pulse Code Device) for analog links. More about ETC and PCD later on in this chapter.
Generally speaking, we can say that GSS connects one inlet in the Group Switch to one outlet, since all telephony devices connected to an AXE 10 exchange need to be through connected via GSS. The Group Switch has one inlet and one outlet per device/channel. This makes it possible to have a bothway connection.
3.1.1 Basic Functions, Hardware and Software.
The Group Switching Subsystem has the following functions:
a) Selection, connection and disconnection of speech or signal paths through the Group Switch.
b) Supervision of hardware in the subsystem by continuous par-ity checks.
Chapter Objectives
After completing this chapter the participant will be able to:
• Understand the main principles of the Group Switch.
• Describe the basic blocks in subsystem GSS.
• Describe the basic hardware of the Group Switch.
• Perform connection of SNT and devices to the GSS.
d) Maintaining a stable clock frequency or synchronization of the clock frequency of the network.
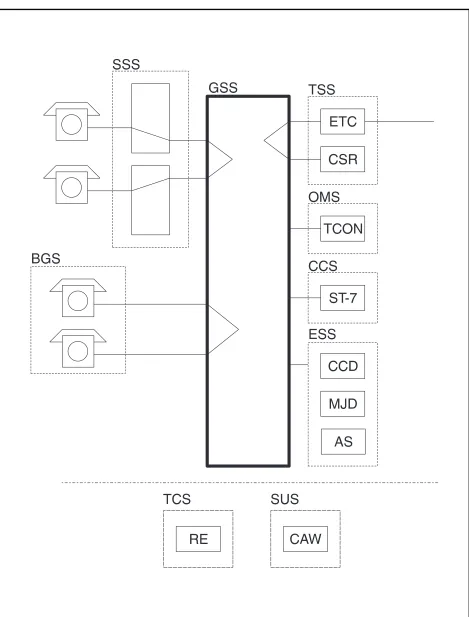
To make these functions possible in GSS, lots of functions have been implemented in different function blocks. Some of these which are related to traffic handling are described in this chapter. Figure 3.2 shows the most important blocks.
Figure 3.2
Connection to Group Switch
A brief description of the different blocks follows below:
1. GS, Group Switch
It is implemented in central software only and it is responsible for storing connection information and also interfaces towards some other subsystems.
Also, it should be mentioned that the former version of the GS func-tion block contained hardware and some other funcfunc-tions that now are implemented in other function blocks. Note that this earlier version is still available in some application systems.
2. GSM1/GSM2, Group Switch Maintenance
These two blocks assist block TSM with maintenance functions regarding TSMs and SPMs. They contain administration functions for all SNTs (Switching Network Terminals) connected to the switch.
3. TSM, Time Switch Module
This block consists of hardware, central and regional software. Its hardware is the TSMs and SPMs. It handles the normal switching functions such as connection and release of speech paths, adminis-tration of TSMs and SPMs as well as counters for statistics and traf-fic measurements. This function block did not exist in the former version of the GSS.
4. GSBOARD, Group Switch Board Names
This block is fully realized in central software and some of its main functions are translation of fault cases into suspected printed boards for printing when fault diagnostic functions are performed. This block did not exist either in the previous version of the GSS.
5. CLT, Clock Pulse Generation and Timing
The hardware of this block is the three Clock Modules which supply the TSMs and the SPMs with clock pulses. It also handles mainte-nance functions as well as counters for statistics and traffic measure-ments. Due to the introduction of new clock modules the CLT function block has been revised.
6. NS, Network Synchronization
The digital exchanges must be synchronized with each other. Block NS contains functions, implemented in both hardware and software, for synchronization of the network.
7. Blocks for Operation and Maintenance
There are several blocks related to the O&M of the GSS. These blocks supervise the hardware, handle commands, alarms, handle temporary errors in the hardware and perform routine tests of the hardware.
Examples of other subsystems that interwork with GSS are:
For traffic handling:
TCS for connection of A and B-subscribers
TSS for connection of Code Senders / Code Receivers and trunk lines
SSS for call release and connection of subscribers and PABX, (Private Automatic Branch Exchange)
BGS for call set-up within the Business Group
ESS for operator calls, monitoring and subscriber services. Function blocks CCD (Call Conference Device) and MJD (Multi Junctor Digital) belonged to the GSS earlier but have been incorporated in ESS.
For Operation and Maintenance:
OMS handling of test calls (call set-up and release).
Statistics:
STS Statistics & Traffic Measurement Subsystem.
Others:
OPS for trunk offering and operator-assisted calls
SUS subscriber services requiring three-party conference calls and other services requiring conference calls (Call Waiting)
Connection to Group Switch
Figure 3.3 gives some examples of subsystems interworking with GSS.
Figure 3.3
3.1.2 Hardware Structure and Switching
In order to ensure adequate flexibility, the Group Switch has been
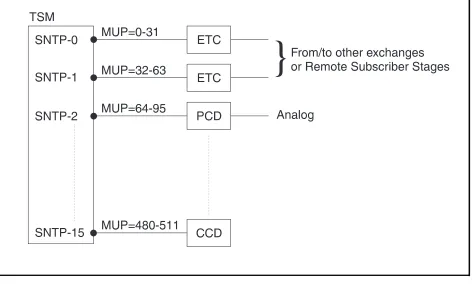
designed and structured into modules referred to as Time Switch Modules (TSM) and Space Modules (SPM). The number of TSMs and SPMs required in an exchange depends on the number of trunk and subscriber lines.
To each Time Switch Module, up to 16 PCM systems can be connected. This means that each TSM has 16x32=512 inlets, or Multiple Positions. Each 32-channel PCM system is connected to the TSM in a so called Switching Network Terminal Point, SNTP. See figure 3.4. The “Switching Network Terminal, SNT” is a common term for all type of equipment that can be connected to the Group Switch. SNT is, however, a software con-cept and represents the software connection of the physical hardware to the Group Switch.
Examples of equipment that can be connected to the GS are:
•
Exchange Terminal Circuits, ETC•
Conference Call Devices, CCD•
Pulse Code Devices, PCD.The PCD is used if analog devices should be connected to the GS. The PCD is nothing but an analog-digital converter. Figure 3.4 shows the prin-ciple.
Connection to Group Switch
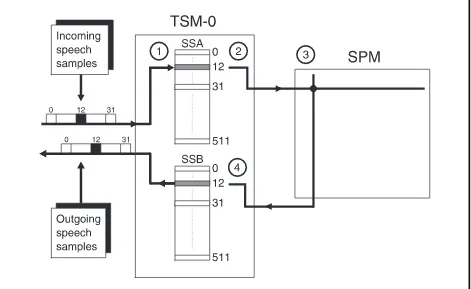
1. The speech samples originating from the subscribers (or the signals from signalling devices such as Code Senders) are stored in a speech store referred to as Speech Store A, SSA. Each channel in the PCM systems connected to the TSM has its own storage position in SSA. This means that the SSA has 512 store positions, one for each chan-nel (16x32).
2. We can now introduce the concept of multiple position (MUP) which is the common term used when talking about either channels or storage positions within a TSM.
3. To make it possible to switch between TSMs, the Space Module (SPM) is used. The SPM is also used for speech samples that are to be sent back to the same TSM in the case when the A-party and B-party are connected to the same TSM. More about the SPM later on.
4. When the SPM has switched the speech sample and sent it to the correct TSM, the sample is stored in another store. This store is referred to as Speech Store B, SSB. As with SSA, each channel in the connected PCM systems has its own store position. This means that the relationship between channel and store position is fixed in both SSA and SSB. Figure 3.5 shows the general principle.
Figure 3.5
The connection of the channel used by the A-subscriber
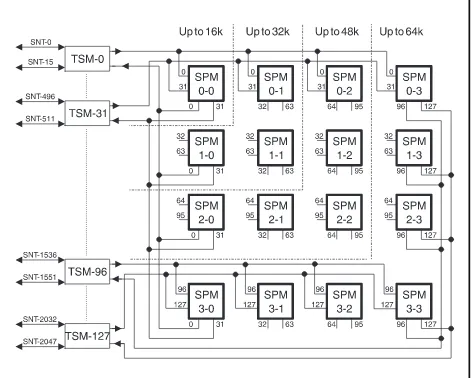
the GS, there is full availability. This means that any position connected to the GS can be connected to any other position via an SPM (from one TSM to another or within the same TSM). To make it possible to have a Group Switch with a size varying from some thousand multiple positions to 65 thousand, 64K, the number of SPMs used in the switch can vary. Figure 3.6 shows the extension steps of the Space Modules.
Figure 3.6
The connection and extension steps of the Space Module
Up to 32 Time Switch Modules can be connected to one SPM. This means that one SPM is enough for Group Switches up to the size of 16384 multi-ple positions (32x32x16). This is called 16K GS. In case of more TSMs, there must be a matrix of SPMs built up. The reason for having this matrix is that only one SPM can be used for the switching (Time-Space-Time principle). If more SPMs were involved in the switching, time delays would be a great problem.
Connection to Group Switch
up a Group Switch with 65536 multiple positions (2048 PCM systems with 32 channels each). This is called 64K GS.
A PCM line is a time-division multiplexed connection used by a number of channels in both directions. The number of channels per PCM system is 24 or 32. The 24-channel system is used in the US and some other coun-tries. If compared with an analog transmission system, the PCM line can be compared with a four-wire system, two wires in each direction.
3.1.3 Control of the Switching
When are the speech samples sent over from SSA to SSB and how is the SPM going to know to which TSM it should send the information? All these things are controlled inside the Group Switch by means of “Control Stores”. The control stores are hardware registers that control both the SSA/SSB and the Space Module. When a path is to be established in the switch, the software of block GS in the CP will select a path and then write the proper information in the control stores. The actual writing is carried out by the Regional Processors (regional software of block GS).
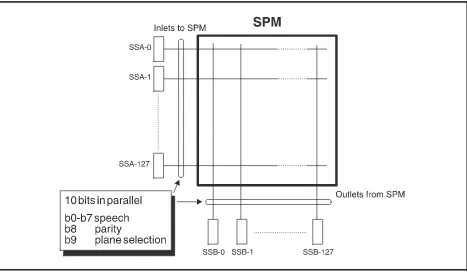
The first part studied is the control of the Space Module. In order to make it easier to understand the SPM, it can be illustrated by drawing a matrix composed of horizontal and vertical lines. Speech Store A of all TSMs are connected to the horizontal lines and Speech Store B to the vertical lines. The lines are in fact time multiplexed buses containing 10 bits in parallel. There are 8 bits for the speech sample, one bit for parity and one bit for the plane select function (more about that later on). Figure 3.7 shows this sim-plified Space Module and Speech Stores A and B in the TSMs.
When a cross point is operated, the 10 bits are connected in parallel from a horizontal line to a vertical line. This means that the speech samples are sent over from SSA to SSB.
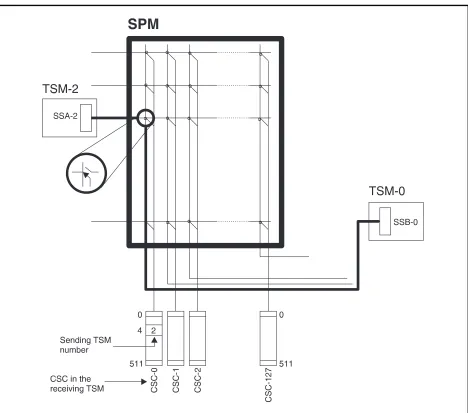
All cross points along a vertical line are controlled by a control store referred to as Control Store C, or just CSC. There is one CSC per TSM in the switch and the store has 512 positions. Figure 3.8 shows the principle.
Figure 3.8
The cross points in the SPM are controlled by Control Store C, CSC
Each address inside the CSCs contains the number of the cross point to be operated at each moment. This means that the information written in the CSCs is the number of the sending TSM.
Connection to Group Switch
This is done by a control store referred to as “Control Store AB” or just CSAB. The name indicates that the store is used to control reading and writing from and to Speech Stores A and B respectively. To see how the CSAB is used, the example in figure 3.9 is studied.
Figure 3.9
A complete path in the Group Switch
The example described here shows how the hardware of the Group Switch is used to set up a two-way connection between two points. This simplified description shows the general principles of how the control stores are used to control the switching.
CSAB as it's mentioned above in one of its storage positions stores the cor-respondent SSA address from where the incoming information is to read out (MUP 12).
In order to transfer the incoming speech from the SSA to the SSB, a cross point is operated and this is done via the SPM (Space Module). How is this switching achieved?
The CSC located in the receiving TSM (TSM-1 in this example) will be used for this purpose. The information written in one of the CSCs storage positions is the number of the sending TSM, TSM-0 in our example.
Note that the selected storage position in CSAB 1) and CSC (TSM-1) is the same (address number 279), though the address number in CSAB (TSM-0) is 23, this means that the so called “Anti-phase method” is used when selecting the storage position from where the outgoing speech sam-ple will be written.
3.1.4 Security
The Group Switch consists of two identical, parallel working planes, they are referred as the “A-plane” and “B-plane”. This avoids up to 500 calls from being interrupted or disturbed when a TSM becomes blocked. The two planes are totally independent of each other and all units that are con-nected to the GS are concon-nected to both planes. The speech samples are always sent to both planes but the data is only fetched from one of the planes, usually the A-plane.
In order to tell the connected units from which plane they should fetch the information, a so called “Plane Select Bit” is used. This bit tells the con-nected units if they should read from plane A or B. Figure 3.10 shows the general principle.
Figure 3.10
Connection to Group Switch
If only one TSM is blocked in one of the planes, all connections to that TSM will use the other plane. However, if two different TSMs are blocked in different planes, it is not possible to set up calls between these TSMs. In that case, the software of GSS will generate a special alarm indicating that there are traffic restrictions in the Group Switch.
3.1.5 Synchronization
The main purpose of synchronizing a network is to minimize the slip rate between the exchanges. The whole network must keep almost the same clocking speed for their Group Switches. In the case of AXE 10, the Group Switch controls the clocking of the transmitted data on the outgoing PCM links. Also the reading of speech samples is controlled by the clock in the GS.
In order to supply the Group Switch with reliable clock information, three so called Clock Modules (CLM) are used. These three clocks are all oper-ating and one of them is master. This means that the other two CLMs try to synchronize themselves to this clock.
Inside each CLM, there is a VCXO, Voltage Controlled crystal Oscillator, and a Device Processor (microprocessor) which contains software for adjustment of the VCXO. Depending on the phase measuring results from the other CLMs, the Device Processor adjusts the VCXO in one direction or the other. Via driver circuits, the TSMs and SPMs are supplied with clocking information from all three CLMs. Inside the TSM/SPMs, there is a clock selection circuit that performs a majority choice of the incoming clock signals.
switch. Please study figure 3.11.
Figure 3.11
The hardware of the Clock Modules
If the exchange is connected with other digital exchanges, the network must be synchronized in some way. If that is the case, block NS, Network Synchronization, is required in the exchange. This block will supply the CLMs with a reference clock that the CLMs have to follow.
Several methods exist for the synchronization of the exchanges in a digital network. One of the methods is the so called “Master-Slave” method. For security reasons, there is usually a secondary master in the network. This means that the incoming PCM lines are used as reference when synchro-nizing the Group Switch (channel 0). Figure 3.12 gives an example of how the Master exchange can synchronize the Slaves and also the hardware required in a Slave exchange.
G ro up Sw itc h (o ne plane)
O rd er from softw are in C P C loc k
s elect C loc k
s elect
TS M
SP M
C L M -0 C L M-1
C L M-2
2x4 ,096 M Hz a nd 8 k Hz
Phas e d ifference
meas u rement D P A/ D conv
V CX O V CX O
Connection to Group Switch
Figure 3.12
Hardware required in a Slave exchange
3.1.6 Printouts
In order to check the state of the Group Switch and the Clock Modules, some print commands are available. The first command studied, GSSTP, is the print command to print the state of the different parts of the Group Switch. The command prints the states of the TSMs, SPMs and CLMs. If no parameters are given in the command, all the units in the switch will be printed. If a parameter is used, (TSM, SPM or CLM) only that type of equipment will be shown. Figure 3.13 shows an example of the printout received when using command GSSTP.
Figure 3.13
Printout of the state of the Group Switch
Connection to Group Switch
The CLM with the value of 2048 is the one that is Master related to the other two. The Device Processor can, via an A/D-converter, control the VCXO with a value between 0 and 4095. If the value is reaching the lim-its, i.e. close to 0 or 4095, an alarm will be initiated telling the staff that the CLM must be adjusted manually or changed.
3.1.7 Blocking of Units
When blocking the units belonging to the GS (TSM, SPM or CLM) the command GSBLI is entered.
3.2 Connection of SNT and DIP
3.2.1 General
As the Group Switch, GS, is a central part of the exchange, almost all telephony devices are connected to it. The only exceptions are the devices connected to the Subscriber Switch, e.g. LIC and KRC. As several types of devices are connected, a standard hardware interface is required. The standard interface is implemented in a circuit called GSNIC, Group Switching Network Interface Circuit. The GSNIC is a custom circuit that handles functions such as plane selection, link supervision and test rou-tines and is included on the ETC board. For some older types of equipment connected to the GS, this function is implemented in a PCB referred to as TPLU, Time and Plane selection Unit. In that case the GSNIC is mounted on the TPLU board. Figure 3.15 shows the principle.
Figure 3.15
Connection to Group Switch
3.2.2 Devices Connected to the Group Switch
Which devices then, can be connected to the GS? Figure 3.16 shows the most common devices that can be connected to the Group Switch.
Figure 3.16
Devices connected to the Group Switch
3.2.3 ETC (Exchange Terminal Circuit)
The hardware unit ETC, Exchange Terminal Circuit, is the interface towards the connected external PCM lines as well as connected Remote Subscriber Switches. This unit together with some other blocks is respon-sible for the supervision of the PCM lines. These blocks, and the functions included in them, are described later on in this Unit.
Figure 3.17
The structure of block ET
In the hardware of the ETC, supervisory circuits read the alarm words transferred in channels 0 and 16 (if CAS is used). When something abnor-mal is detected, e.g. an alarm is sent out or a slip is generated, the informa-tion is sent to ETR, the regional software of block ET. The informainforma-tion is then sent further on to ETU the central software of block ET. In the other direction, the central software of block ET can send alarm information to the other end by ordering the regional software to write in some registers in the ETC.
Connection to Group Switch
ET which will forward the signal to the hardware. In this case, block ET does not process the signal in any sense, it just forwards the information to the hardware, ETC.
The ETC contains functions for error detection, such as slip, alarm words in channel 0 and loss of frame synchronization words. The TPLU function is the interface towards the Group Switch described earlier. Figure 3.18 shows the main functions in the ETC.
Figure 3.18
The main functions in the ETC
If the ETC is used to connect Remote Subscriber Switches to the Group Switch, block ET is the owner of the ETC. In the other end of the digital line, the ETB, Exchange Terminal Board, is used to connect the Remote Subscriber Stage to the PCM line. This means that blocks ET and RT are both handling the same PCM line. The supervision of the PCM line is in this case handled by both blocks. Figure 3.19, on the next page, shows the principle.
Figure 3.19
The blocks handling the PCM line to an RSS
Some device types which use the ETC as interface are digital bothway trunks (i.e. BT2, BT4,...etc. including also C7 trunks) and Remote Termi-nal devices (i.e. RT1, RT2,...etc.)
3.2.4 PCD (Pulse Code Device)
As shown in figure 3.15, PCD is the hardware unit used as an interface to connect analogue and some other devices to the Group Switch. The func-tion blocks which handle those device types are not the owners of their own hardware, as the ETC is.
There are two PCD types, the normal PCD and the PCDD which is digital. PCD is used by analogue devices. PCDD is the PCD variant intended for Signalling Terminals used by the CCITT 7 signalling system mainly.
Connection to Group Switch
3.3 The SNT Concept
The SNT concept, Switching Network Terminal, has been introduced in the AXE system for several reasons:
1. Hardware Interface
As several different types of hardware units can be connected to the Group Switch, there is a need for a standard. All units designed must follow this standard.
2. Software Interface Regarding Supervision
The digital lines between the Group Switch and the connected devices must be supervised. The Group Switch software can order the connected units to perform tests. All units designed must be able to handle the supervision in a similar way.
3. Operation and Maintenance
To make it easier for the O&M staff to handle the different units con-nected to the Group Switch, the SNT concept includes a standard interface (commands and printouts) towards the operators. All units connected to the Group Switch are handled in the same way.
In hardware, the ETCs and PCDs are connected to the LMU boards in the Time Switch Modules. This is done with a cable from the ETC/PCD (see figure 3.20). Because of timing of the digital pulses, the length of the cable is limited to 40 meters.
In software, one block must be pointed out to be responsible for the super-vision of the digital link between the device and the Group Switch. For blocks which are designed to cooperate with the 64k Group Switch, the blocks that “own” the hardware can handle that supervision. If this is pos-sible, the Application Information of the block indicates it by including some parameters related to SNT.
For blocks designed to cooperate with some other Group Switch versions (an older variant), an adaptation block has to be responsible for the super-vision. In that case, one of the following blocks should be used:
For units of type ET: SNTET and SNTETM
For units of type PCD: SNTPCD and SNTPCDM
3.3.1 Connection of SNT
When defining the SNT (i.e. the ETC is connected to the Group Switch in software), the command includes a parameter indicating the variant of the SNT. This means that the operator indicates which type of magazine is used. This information is required when errors in the hardware are
When defining the SNT, there are Operational Instructions that must be followed. The OPI is called “Connection of Switching Network Termi-nal”. The initiating command is NTCOI. See figure 3.20.
Figure 3.20
Connection of SNT
The command has the following parameters:
NTCOI:SNTP=sntp,SNT=snt,SNTV=sntv;
The parameters have the following meanings:
•
SNTP, SNT PointThis parameter indicates the hardware position of the connection in the Group Switch. If the second inlet in TSM-2 is used, the parameter should be SNTP=TSM-2-1.
•
SNT, Switching Network TerminalThis is the name of the SNT. The name must follow a special syntax as the name of the SNT block must be the first part of the name followed by a number. The name and the number must be separated by a dash “-”. If the first SNT is defined using ETC devices, the name is ET6-0 (if block ET6 has SNT functions).
•
SNTV, SNT VariantConnection to Group Switch
When the SNT has been defined, the SNT is tested by using the command NTTEI. The test checks the connected hardware by using a special test program. The test checks the hardware of the ETC and also the interface between the ETC and the Group Switch. Finally, the SNT is deblocked by using the command NTBLE.
3.3.2 Connection of Devices to the SNT
When the SNT has been installed and tested, the devices can be connected to the SNT. That is done by using the command EXDUI. See figure 3.20. The command has only one parameter:
EXDUI:DEV=dev;
How, then, will the system know which SNT to use? The answer is that there is a fixed relationship between the SNT number and the device number:
Device number SNT number
0-31 0
32-63 1
64-95 2
...
320-351 10
...
and so on..
There are several possibilities of printing the state of the SNTs and also of checking to which SNT a device belongs. In the following figures 3.21 and 3.22, the SNT is printed in two ways.
Figure 3.21
Figure 3.22
Connection to Group Switch
3.4 The DIP Concept
DIP stands for Digital Path and is the name of the function used for super-vision of the connected PCM lines. CCITT has issued recommendations which state how the PCM systems should be supervised. All these recom-mendations are implemented in the DIP function which belongs to subsys-tem TSS, Trunk and Signalling Subsyssubsys-tem. A number of blocks starting with the letters DIP contain the functions described here. In this chapter, only the connection of the function is described. Modules in the mainte-nance part of this course describe how the actual supervision and alarms are handled.
The SNT supervision supervises the hardware of the connected units, e.g. the ETC, while the DIP function supervises the PCM line. Please study figure 3.23.
Figure 3.23
Digital Path supervision
Digital Path. The Digital Path, called DIP hereafter, is given a name of a maximum of 7 characters. The name is used just as a route name: it should be given a name that reflects where the traffic on those lines goes to and come from as the DIP name is included in alarms related to the DIP. An example of the command is:
DTDII:DIP=0BT6,SNT=ET6-0;
When the DIP has been defined, some initial data is set by using the com-mand DTIDC, see B11 Comcom-mand description. This comcom-mand defines functions like:
•
attenuation of high-level signals (used with echo canceller)•
line code (only used for 24-channel ETC)•
frame structure (only used for 24-channel ETC)•
handling of channel 16 in case of Common Channel Signalling between the parent exchange and RSS•
supervisory parameters.Some of the parameters in the command are only used if the DIP is a 24-channel ETC (e.g. US market). Please study the command description for the DTIDC command.
The next action is to load the fault supervision data for the DIP. The data is loaded with command DTFSC and printed with DTFSP. Command DTFSC connects different types of fault cases to the DIP and associates an alarm class with each fault case. The principle is easiest explained by first looking at a printout of the fault supervision data. Please study figure 3.24.
Figure 3.24
Printout of DIP Fault Supervision Parameters
Connection to Group Switch
cases are listed in the command description of command DTFSC and also the possibility of combinations for different types of PCM systems (not all fault cases can be supervised by all PCM systems, e.g. 24-channel systems and CCS). However, the fault cases in the command are:
Fault case Meaning
1 Alarm Indication Signal, AIS.
2 Loss of Frame Alignment.
3 Excessive error rate.
4 Alarm indication from remote end.
5 Alarm indication in ch. 16 (only CAS).
6 Loss of Multi Frame Alignment (only CAS).
7 Alarm indication from remote end signalling equipment.
8 Alarm Indication signal, ALL1.
9 Loss of CRC multiframe alignment.
For further information regarding DIP fault supervision please consult the Appendix 1 at the end of this chapter.
When the fault supervision data has been loaded for the DIP, the next step is to load the quality supervision parameters. The quality supervision is used to monitor the quality of the PCM line and if the quality on the line is below defined values, alarms will be generated. The quality supervision is divided into three main parts:
1. Bit Fault Frequency supervision
2. Slip Frequency supervision
3. Disturbance Frequency supervision.
Figure 3.25
Printout of DIP quality supervision parameters
Connection to Group Switch
Figure 3.26 shows how the printout should be interpreted.
Figure 3.26
3.5 Chapter Summary
Connection to Group Switch is realized based upon as follows:
•
Basic functions implemented in hardware and software.A set of function blocks, some of them comprising both hardware and software and some only software.
•
Hardware structure and switching.Well structured hardware to provide switching based upon Time-Space -Time principle.
•
SecurityHardware reliability is provided by two identical, parallel working planes that are referred as “A-plane” and “B-plane”.
•
SynchronizationInternal synchronization is provided by 3 Clock Modules (CLM) while external synchronization comes from either a Reference Clock Module (RCM), Cesium Clock Module (CCM) or any other 8KHz source.
•
Connection of Switching Network Terminals (SNT) and devices to the GSS is executed according to the existing hardware interfaces such asExchange Terminal Circuits (ETC (digital)) and Pulse Code Devices
(PCD (analogue)) among others and a command sequence to follow in the correspondent OPI.
•
PCM line supervision and the Digital Path (DIP) concept.Connection to Group Switch
3.6 Appendix 1
3.6.1 Channel Associated Signalling, CAS
When using this method for the signalling, the line signals are transmitted in channel 16 of the 32 channels (other principles for 24-channel systems). In order to know to which channel the signalling is related, a multi frame structure has to be defined. Please study figure 3.27.
Figure 3.27
Frame and Multiframe structure of 32-channel PCM when using Channel Associated Signalling
Channel 0 is always used for Frame synchronization and alarm informa-tion to the remote end. In channel 16 of each frame, line signals are trans-mitted. In the first frame of the Multiframe, a so called Multiframe
3.6.2 Common Channel Signalling, CCS
If signalling system CCITT No 7 is used, the frame structure differs slightly compared with CAS. As all signals are sent by the Signalling Ter-minal, there is no need to have a multi frame structure on the PCM line. In that case, only channel 0 is used for the transmission of alarm and Frame synchronization words. This fact will also reflect the supervision of the PCM line as described later in this Appendix1.
3.6.3 Supervision of the PCM Line
Functions inside the AXE system are used for supervision of the con-nected PCM lines, i.e. the DIPs. The supervision is performed by the ETC and some software functions for processing of error information. Whereas the ETC hardware is supervised by the SNT, the ETC (plus some DIP supervision blocks) supervises the DIP.
The main principle when supervising a PCM system is that the receiving end checks the information in channels 0 and 16 (only in channel 0 if CCS is used). In channel 0, the alarm word is read and in channel 16, there is alarm information related to the multiframes. If the receiver of a PCM sig-nal detects any errors (e.g. no Frame Synchronization word found), it will indicate that to the other end by inserting the alarm information in channel 0. Please study figure 3.28.
Figure 3.28
The remote end sends an alarm in channel 0
Connection to Group Switch
rupted, the ETC will not be able to generate any clocking and no speech can be transmitted to the other end. In that case, the ETC will start to transmit only “1” in all channels. The sending of only ones will be interpreted as an AIS by the receiving end.
2. Loss of Frame Alignment
If an ETC is unable to find the Frame Synchronization word in chan-nel 0, it will indicate that to the other end by generating an alarm in channel 0 in the other direction.
3. Excessive Error Rate
If the frequency of lost frames, multiframes, AIS and AIS from the remote end exceeds a preset value, it is referred to as “Excessive error rate”.
4. Alarm Indication from Remote End
This is the same event as number 1 (AIS) but when the other end indicates the alarm in channel 0.
5. Alarm Indication Signal in Channel 16
If the remote end does not find the multiframe synchronization word in channel 16, this alarm is issued to the other end.
6. Loss of Multiframe Alignment
The home exchange does not find the multiframe alignment word.
7. Slip Rate
Slip occurs if the sending and the receiving ends of the PCM line have different clocking speeds. If that is the case, one complete frame is lost or read twice in the ETC. If too many slips are counted during a period, the system should generate an alarm as the quality of the connection is too bad. The slip rate is more critical for data transmission than for speech. How many slips per time unit is acceptable? A standard value is 5 slips in 24 hours. If more slips are counted, an alarm should be generated.
8. Bit Faults
If the PCM link generates too many bit faults, the data transmission on the link is disturbed (e.g. digital telefax or CCITT no 7 signal-ling). CCITT states, that if more than 1000 bits are faulty out of 1 million (1000 ppm), the line should be blocked. How, then, will the system know if a bit has changed? It is not possible to read the speech samples as their contents are unknown. Instead, the Frame Synchronization and, if used, the Multi Frame Synchronization words can be used as there contents are known.
9. Disturbance Frequency
4. Size Alteration
Figure 4.1
Chapter Objectives
4.1 Size Alteration
4.1.1 Introduction
Size Alteration is the name of the function used to change the file sizes in the Data Store of the Central Processor. The changes are normally initiated by a change in the size of the exchange or in the traffic intensity of the exchange. Examples of changes in the size of the exchange are addition of more subscribers or more trunk lines added. If the traffic intensity is increasing, the number of register individuals must be increased.
The affected part of the AXE system is the Data Store in the CP. In this store, the data related to all the blocks are stored. The size of the data, i.e. the number of data individuals, is changed by the function Size Alteration. The Program Store is not affected by this function as there is no change of the function of the system. If new or modified functions are loaded into the exchange, the process referred to as Function Change is used.
Chapter Objectives
After completing this chapter the participant will be able to:
• Describe the main principles of Size Alterations.
• Perform Size Alteration.
• Generate and interpret printouts related to Size Alteration.
• Explain the use of Size Alteration Events.
Figure 4.2 shows the difference between these two methods.
Figure 4.2
The parts in the exchange affected by Size Alteration and Function Change
4.1.2 Initial Setting
Size Alteration
Figure 4.3
4.1.3 Hardware Extension
If e.g. the number of trunk lines in an exchange is extended, there is usu-ally a requirement for more hardware to be installed as well. This means that more ETC boards (or magazines for older types of ETCs) have to be installed in the exchange. For each channel in the PCM system (24 or 32 channels per ETC), there is some data in the Data Store that defines e.g. the state of the device and to which route it belongs. As there is data related to each hardware unit, the file sizes in the Data Store must be changed by means of a Size Alteration. Please study figure 4.4.
Figure 4.4
Extension of hardware requires change of file sizes in the Data Store
Size Alteration
4.1.4 Extension by Using More Software Individuals
In many cases of Size Alteration, only software is affected. Some exam-ples of changes that only affect software are given below:
1. If the traffic intensity (Erlang) is increasing in the exchange, more Register individuals are required to handle more simultaneous call set-ups. In this case, no additional hardware is required as the RE block is implemented in software only.
2. If more subscribers would like to have a certain subscriber service (e.g. Call Transfer), more data individuals are required in order to handle more call transfers at the same time. Also the storage capac-ity of the service will probably have to be increased (e.g. the C-number in the case of Call Transfer). Also in this case, only software is affected as all subscriber services are implemented in software only.
3. Analysis tables have space for a limited number of analysis cases. The size of each analysis table is set by means of a Size Alteration. Examples of such tables are the analysis table for the B-number analysis and the Charging analysis table. If more analysis cases are to be introduced (e.g. more Charging Cases or new subscriber number series), a Size Alteration is used to create more space in the table.
Figure 4.5 gives an example of a change when only software is affected.
Figure 4.5
New register individuals are defined by means of a Size Alteration
4.1.5 What is a Data File?
A size alteration affects a data file consisting of data records (referred to as an individual in some cases). What, then, is a data record? Please study figure 4.6.
Figure 4.6
Definition of data file and data record
Size Alteration
It should also be noted that one Function Block usually contains more than one file. As an example, one type of record is used to store data related to the devices inside the block and one type of record is used to store the data related to the routes defined in the block. This means that the block has two different files in the Data Store that can be changed independently of each other.
4.1.6 The Use of Size Alteration Events
In order to find the blocks that are affected by a Size Alteration, the AXE system numbers the Size Alteration cases. Each number is referred to as “Size Alteration Event” or just SAE. The SAE is used as a parameter in all the commands related to the size alteration function. Also the documenta-tion of the B-module uses the SAE number in various documents and lists.
There are two different types of size alterations in the AXE:
•
Local Size Alteration EventsThese events will only affect one block in the exchange. An example of such an event is the number of devices inside one block.
•
Global Size Alteration EventsThese events will affect files in more than one block. An example is the number of routes in the exchange. Several blocks in the system store information about each route and all these blocks require the same file size (e.g. blocks for statistics and supervision).
The Size Alteration Events (the numbers) are allocated in a special way so that AXE will know which system (APT or APZ) and which type of event it is (Local or Global). The following numbering has been used inside the system:
•
Global Events:−
APT: 000-299−
APZ: 300-499•
Local Events:−
APT: 500-799−
APZ: 800-9994.1.7 Commands Related to Size Alteration
There are only three commands related to the function for Size Alteration function. The three commands are:
SAAII
The command is used to Increase the file sizes in a Size Alteration Event.
SAADI
Used when Decreasing the file sizes in one SAE.
SAAEP
Used when Printing the number of individuals currently defined for the SAE.
The two commands for changing the file size (SAAII and SAADI) have an optional parameter, “BLOCK=block”. This parameter must be used if the SAE is a local event. The reason for having this parameter is that the Local SAEs (e.g. SAE=500) use the same SAE number for several blocks