Development Of Blind Spot Detection System For Vehicle
Full text
Figure

![Figure 1.2: The Blind Spot Information System [7]](https://thumb-us.123doks.com/thumbv2/123dok_us/136577.13721/16.595.166.521.153.351/figure-the-blind-spot-information-system.webp)
![Figure 2.1: The Blind Spot Information System (BLIS) of Volvo [6]](https://thumb-us.123doks.com/thumbv2/123dok_us/136577.13721/20.595.217.494.553.714/figure-blind-spot-information-blis-volvo.webp)

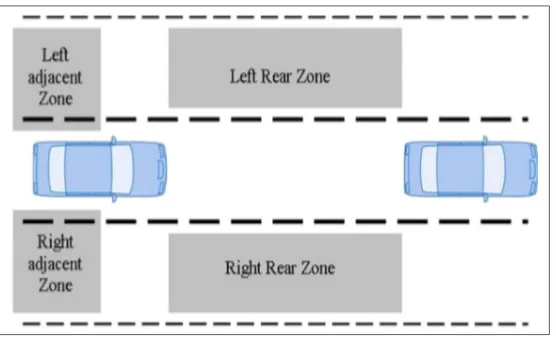
![Figure 2.7: System Equipment by Top View [9]](https://thumb-us.123doks.com/thumbv2/123dok_us/136577.13721/24.595.195.477.324.561/figure-equipment-view.webp)
Related documents
This study was conducted by applying of descriptive quantitative that involved the description, analysis, and interpretation of conditions that exist within the topic. The
In addition, there is no obligation for Religious Court Judges to use the KHI as the basis for legal considerations, allowing for some Religious Court Judges to use the
Two conclusions emerge: (1) such markets generally converge to the competitive equilibrium and (2) forced disclosure works to the disadvantage of the disclosing side.
He points out that the Summary Plan Description for the Investment Plan states that Investment Plan accounts are not subject to assignment, execution, attachment, or any
Standard and Poor's Depositary Receipt Dow Jones Global Titans Exchange Traded Fund 265649 New York Stock Exchange (NYSE) Arca Standard and Poor's Depositary Receipt Dow
According to this model, the variables that have the strongest explanatory power are global satisfaction with work and the fear that health problems will limit one’s working
settlement: Where the parties successfully settle the claim filed in the DIFC Courts in full, the following reimbursements shall apply: • For claims settled before the Case
