Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
8-1-1993
CSG based automatic mesh generation using
multiple element types
Richard H. Hall
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
.
Recommended Citation
Approved by:
CSG BASED AUTOMATIC MESH GENERATION
USING MULTIPLE..ELEMENT TYPES
by
Richard H. Hall
A Thesis Submitted
In
Partial Fulfillment
of the
Requirements for the Degree of
MASTER OF SCIENCE
In
Mechanical Engineering.
Prof.~
_
Dr.
Richard Budynas (Thesis Advisor)
Prof.
_
Dr.
Joseph Torok
Prof.
_
Mr.
Guy Johnson
Prof.
_
Dr.
Charles Haines (Department Head)
Department of Mechanical Engineering
College of Engineering
Title of Thesis -- "CSG Based Automatic Mesh Generation using Multiple Element Types"
I, Richard H. Hall, hereby grant pennission to the Wallace Memorial Library of R.I.T. to
reproduce my thesis in whole or
in
part. Any reproduction will not
be
for commercial use or
profit.
Date: 10/21/93
Abstract
The
objective ofthis thesisprojectis
toexplore aunique approachtowardautomatic meshgeneration
for finite
element analysis.Current
mesh generationalgorithms areonly
applicable to a singletype ofdomain.
Countless
meshgeneratorsexistfor meshing 2D
regions with triangles andquadrilaterals, and mesh generators also existwhich can mesh
3D
regionswith tetrahedraandother elementtypes.
However,
not all structures arestrictly
"2D"or
"3D",
and not all structuresare
best
modeledwitha singletype of element.An
experiencedfinite
element analysttypically
uses
many
typesofelements whenmodeling
a real problem.This
thesisaddresses this approach tomeshing in
anautomatic manner.However,
atvarious stages, the userhas
theability
tochangethecourse ofthemodeler.
In
this thesis project,aprogramfor
automatic mesh generationhas been developed
on aconstructive solid
geometry
(CSG)
foundation. This
program waswrittenin
object-orientedPascal,
and consistsof well over25,000
lines
of code.The
CSG
system used wasdeveloped
withPADL-2
asthe guide, and allowscomplex geometriestobe
modeled as combinations ofblocks
andcylinders.
This
solidmodelis
thenbroken
into
ID,
2D
and3D
regions, or"segments",
using
CSG-Tree
segmentationlogic. Each
segmentcanthenbe
meshedusing
an appropriate meshgenerationtechnique.
Thus,
a singlemodelcanbe
meshedwithmultiple elementtypes, just
as anAcknowledgments
This
thesishas been
along
timein
themaking, whichhas
givenmany
people a chance tocontribute.
I
wouldlike
to thankeveryone who made thewriting
ofthis thesispossible:Dr. Richard
Budynas,
whohas been envisioning
a computer program toperformautomatic mesh generator
using
multiple elementtypesfor
along,
long
time. I'm
thankful toDr.
Budynas
for
having
confidencein
me,believing
thatI
wouldbe
able tomakehis dream
areality,and
for
his
continued support and encouragement.I only
hope
thatwhatI have
produceddoes
justice
to whathe had in
mind.Committee
membersDr. Joseph Torok
andMr.
Guy
Johnson,
whodeserve extraordinary
credit
just for reading
such afat,
boring
book. Dr. TOrok's
knowledge
offinite
elementtheory
and
Guy
Johnson's knowledge
of geometricmodeling
andprogramming
wereinstrumental in
writing
thefinished
version ofthisthesis, and theircontributions aregreatly
appreciated.Mr.
Steve
Kurtz,
who's course"Computer Graphics is
Design" taughtme object-orientedPascal
and, moreimportantly,
enthusiasmfor
elegant programming.Without
having
pickedup
thisenthusiasm
from
Steve,
writing 25,000
lines
of code would nothave been
possible.Dr.
Charles
Haines,
department
head
and academic advisor.As
aBS/MS
student,I'd like
to thank
Dr. Haines
for
making
mefeel
like
therewas someonelooking
outfor
me.The Gleason
Society,
for
thehonor
andfinancial
support ofbeing
selected asthe1991/92
Gleason
Graduate
Scholar.
Thanks
toMegan,
whohas been
animportant
part ofmy
life
and can neverbe anything
less.
And
finally,
I
wouldlike
toexpressmy
appreciation and gratitudefor my
parents,Harley
and
Sandy,
for
theirnever-ending
patience and support.This
thesisandevery
successin my life is
Table
ofContents
Abstract
iii
Acknowledgments
iv
List
ofFigures
viiiList
ofSymbols
xiii1. Introduction
1
1.1. The Finite Element Method in Mechanical
Engineering
1
1.2.
History
oftheFinite Element Method
2
1.3. Finite Element
Theory
4
1.4. Types
andUses
ofFinite Elements
7
1.4.1. One-Dimensional Second-Order Equations
7
1.4.2. One-Dimensional Fourth-Order Equations
12
1.4.3. Two-Dimensional Scalar Valued Second-Order Equations
16
1.4.4. Two-Dimensional
Multi-Variable Equations
21
1.4.5.
Three-DimensionalEquations
22
1.5.
Modeling
using Multiple Element Types
23
1.6. Thesis Objective
24
2. Automatic Mesh Generation
Review
ofRelated
Literature
25
2.1.
History
ofMesh
Generation
25
2.2. Automatic
Meshing
of1-D Regions
26
2.3. Automatic
Meshing
of2-D Regions
27
2.3.1.
Volume
TriangulizationMethods
27
2.3.2. Element
ExtractionMethods
32
2.3.3. Recursive Spatial Decomposition Methods
35
2.4. Automatic
Meshing
of3-D Regions
37
2.4.1. Volume
TriangulizationMethods
37
2.4.2. Element Extraction Methods
39
2.4.3. Recursive Spatial Decomposition Methods
40
2.5. Expert Systems for Automatic Mesh Generation
41
3. Geometric
Modeling
44
3.1.
Modeling
Techniques
44
3.1.1.
Sweep
Representations45
3.1.2. Cell
Decompositions45
3.1.3.
Boundary
Representation46
3.1.4. Constructive Solid
Geometry
47
3.2.
Boundary
Evaluation
48
4. Expert S
ystems53
4.1. Expert
System Structure
53
4.2.
Expert
System
Development
55
5.
CSG
Based
Automatic
Mesh
Generation
using Multiple Element Types
58
5.1.
"CSGMesh"Computer
Program
59
5.1.1. Program Overview
60
5.1.1.1. Input File
60
5.1.1.2.
CSG
Tree
66
5.1.1.3. Segments
70
5.1.1.4. Options
73
5.1.1.5. Meshes
76
5.1.1.6. Output File
83
5.1.2.
Solid Representation
85
5.1.2.1. Solids
86
5.1.2.1.1. Blocks
88
5.1.2.1.2.
Cylinders
88
5.1.2.1.3. Other Primitives
89
5.1.2.1.4. Unions
89
5.1.2.1.5. Differences
90
5.1.2.1.6. Intersections
90
5.1.2.2.
Boundary
Representation
90
5.1.2.2.1. Surfaces
92
5.1.2.2.2.
Edges
93
5.1.2.3.
Boundary
Evaluation
94
5.1.3.
Segments
98
5.1.3.1. BeamSegments
98
5.1.3.2. PlateSegments
99
5.1.3.3.
CylinderPlateSegments
99
5.1.3.4. BrickSegments
99
5.1.3.5. CSG Segmentation Logic
100
5.1.3.5.1. Blocks
103
5.1.3.5.2.
Cylinders
103
5.1.3.5.3.
Unions
103
5.1.3.5.4.
Differences
104
5.1.3.5.5. Intersections
104
5.1.3.5.6. Special
Cases
104
5.1.3.5.7.
Using
Surfaces
tomakeSegments
106
5.1.3.5.8.
Combining
Segments
106
5.
1
.4.Segment
Meshing
Techniques
108
5.1.4.1. Types
ofMeshes
108
5.1.4.2.
Meshing
Beam
Segments
109
5.1.4.3.
Meshing
Plate
Segments
109
5.1.4.4.
Meshing
CylinderPlate Segments
111
5.1.4.5.
Meshing
Brick
Segments
112
5.1.4.6.
Editing
Meshes
113
5.2. Future Extensions
to "CSGMesh"5.2.1. Further Primitive
Types
5.2.2.
Implementing
Mesh
Generators
5.2.3.
Other
possible additionsto "CSGMesh"Results: Examples
ofGeometries
Meshed
using
"CSGMesh"6.1. Plate
withHoles
6.1.1. Plate using Plate
Segment
(2D
Mesh)
6.1.2. Plate using Brick
Segment
(3D
Mesh)
6.2.
I-Beam
6.2.1.
I-Beam using Beam
Segment
6.2.2. I-Beam using Plate
Segment
6.2.3. I-Beam using Multiple Plate
Segments
6.2.4. I-Beam using Brick
Segments
6.3.
Pipe
6.3.1.
Pipe using Beam Segment
6.3.2. Pipe using Plate
Segment
6.3.3. Pipe using
CylinderPlate Segment
6.3.4. Pipe using Brick
Segment
6.4. Pipe
withHoles
6.5. Bracket
114
115
120
122
127
127
129
130
132
133
134
135
136
137
138
139
140
141
142
145
7. Discussion/Conclusion
8. References
150
151
9. Appendices:
Appendix A.
Appendix
B.
Appendix
C.
Appendix
D.
Appendix
E.
Appendix F.
Appendix
G.
PADL-2
Source Files
PADL-2 Point
Sets:
Primitives, Halfspaces,
andEdges
CSGMesh
Object
Hierarchy
CSGMesh
Object Reference
CSGMesh Input
(.CSG)
File
Syntax Diagrams
Algor
Supersap
Output File
ANSYS
version5.0 Output File
Appendix
H.
NASTRAN
Output File
List
ofFigures
Figure
Page
Chapter 1:
Figure 1.1
Division
of circleinto
triangles2
Figure 1.2
Generic Domain
Q
4
Figure 1.3
Strong
andWeak
Statements
5
Figure 1.4
One-Dimensional Domain for
Second-Order Equations
7
Figure 1.5
Typical
One-Dimensional,
Second-Order Element
8
Figure 1.6
Interpolation Functions for ID Two-Node Linear Element
1 1
Figure 1.7
One Dimensional Domain for Fourth-Order
Equations
12
Figure 1.8
Interpolation Functions for ID Two-Node
Quadratic
Element
15
Figure 1.9
Two-Dimensional Domain
16
Figure 1.10
Two-Dimensional
Elements
1
8
Figure 1.11
Interpolation Functions for 2D Three-Node Linear Triangle
Elements
19
Figure 1.12
Four-Node Rectangular Element Local Coordinate System
19
Figure
1.13
Interpolation
Functions for 2D
Four-Node Linear Quadrilateral Elements
20
Figure 1.14
Three-DimensionalElements
22
Figure 1.15
Mesh using Different Element Types
23
Chapter
2:
Figure
2. 1
Convex Hull
of aSet
ofPoints
28
Figure 2.2
Starting
Mesh
for
Delaunay
Triangulation
29
Figure 2.3
Node Insertion in
Delaunay
Triangulation
30
Figure 2.4
Delaunay
Triangulation
oftheConvex Hull
of aSet
ofPoints
3 1
Figure
2.6
Various
Stages
ofaPaving
Algorithm
withFronts
by
Inflation
33
Figure 2.7
Various Stages
ofaPaving
Algorithmusing
Quadrilaterals
34
Figure 2.8
Various
Stages
of aQuadtree Algorithm
35
Figure 2.9
Mesh
Generated
by
Quadtree
Algorithm
36
Figure
2. 10
Mesh
Generated
by
3D
Delaunay
Triangulation
38
Figure
2.11
Mesh
Generated
by Plastering
Algorithm
39
Figure 2.12
Mesh
Generated
by
Octree
Algorithm
40
Chapter
3:
Figure 3. 1
Sweep
Representation
45
Figure 3.2
Boundary
Representation
(B-Rep)
46
Figure 3.3
Constructive Solid
Geometry
(CSG)
Representation
47
Figure 3.4
Polygonal Representation
ofCSG Primitives
49
Figure
3.5
Polygonal Representation
ofCSG Solid
49
Figure
3.6
PADL-2 Block
51
Figure
3.7
PADL-2
Cylinder
51
Figure
3.8
PADL-2 Wedge
51
Figure
3.9
PADL-2
Cone
51
Figure
3.10
PADL-2 Sphere
51
Figure
3.11
PADL-2
Torus
51
Chapter 4:
Figure
4.
1
Expert System Structure
54
Chapter
5:
Figure 5. 1
CSGMesh
File Menu
6
1Figure 5.2
Block in
standard position62
Figure 5.3
Cylinder
in
standard position64
Figure 5.4
Operations
onBlock
andCylinder
65
Figure 5.5
Typical
CSG Input
File
65
Figure 5.6
CSGMesh
CSG-Tree
Menu
66
Figure 5.7
CSG Tree
67
Figure 5.8
CSGMesh
CSG Tree
andSolidList
67
Figure 5.9
Sketch
ofCSG Tree Primitives
69
Figure 5.10
CSGMesh Segments
Menu
70
Figure 5.11
Drawing
ofSegment
(Solid)
7 1
Figure 5.12
Drawing
ofSegment
(Representation)
72
Figure 5.13
CSGMesh Options Menu
73
Figure 5.14
Material Definition
Dialog
Box
74
Figure 5.15
CSGMesh Mesh Menu
76
Figure 5.16
Mesh
ofSegment
(Plate)
78
Figure 5.17
Mesh
ofSegment
(Brick)
78
Figure
5.18
Fine Mesh
ofSegment
79
Figure
5.19
Course
Mesh
ofSegment
80
Figure 5.20
Course Mesh
ofSegment
withNode Added
80
Figure 5.21
Two
Adjoining
Plate
Segments
81
Figure 5.22
Two
Adjoining
Plate Segments Merged
82
Figure 5.23
Two
Adjoining
Plate Segments Merged
andConnected
82
Figure 5.24
Mesh Loaded into Algor
Supersap
83
Figure 5.25
Mesh Loaded
into ANSYS
version5.0
84
Figure 5.27
SolidList
andCSGTree
Data Structures
87
Figure
5.28
Solid
Object
Hierarchy
88
Figure
5.29
Operation Data
Structure
90
Figure 5.30
Boundary
Representation Data
Structure
91
Figure 5.31
Surface Outside
Sense
92
Figure 5.32
Example
ofBoundary
Evaluation
Sequence
95
Figure
5.33
Table (Example
ofCSG Tree
Segmentation)
100
Figure 5.34
CSG Tree
ofTable
100
Figure 5.35
HollowBlock Special Case
105
Figure
5.36
Re-Definition
ofHollowBlock
105
Figure 5.37
Node Generation in Plate
Segments
1 10
Figure 5.38
Node Generation in CylinderPlate
Segments
111
Figure 5.39
Meshing
ofBrick
Segments
1 13
Chapter
6:
Figure 6.1
Plate
withHoles
-Primitives
128
Figure 6.2
Plate
withHoles
-Solid
afterBoundary
Evaluation
128
Figure
6.3
Plate
withHoles
asPlate Segment
129
Figure 6.4
Mesh
ofPlate
withHoles
asPlate Segment
130
Figure
6.5
Plate
withHoles
asBrick Segment
131
Figure
6.6
Mesh
ofPlate
withHoles
asBrick
Segment
1
3
1
Figure
6.7
I-Beam
-Primitives
132
Figure
6.8
I-Beam
asBeam Segment
133
Figure
6.9
Mesh
ofI-Beam
asBeam Segment
133
Figure
6.10
I-Beam
asPlate Segment
134
Figure 6.11
Mesh
ofI-Beam
asPlate Segment
1
34
Figure 6.12
I-Beam
asMultiple Plate Segments
135
Figure
6.13
Mesh
ofI-Beam
asMultiple
Plate Segments
1
35
Figure 6.14
I-Beam
asBrick Segment
136
Figure
6.15
Mesh
ofI-Beam
asBrick
Segment
136
Figure
6.16
Pipe
-Primitives
137
Figure
6.17
Pipe
asBeam
Segment
138
Figure 6.18
Mesh
ofPipe
asBeam
Segment
1
3 8
Figure 6.19
Pipe
asPlate
Segment
139
Figure 6.20
Mesh
ofPipe
asPlate
Segment
139
Figure 6.21
Pipe
asCylinderPlate Segment
140
Figure 6.22
Mesh
ofPipe
asCylinderPlate
Segment
140
Figure 6.23
Pipe
asBrick Segment
141
Figure 6.24
Mesh
ofPipe
asBrick
Segment
141
Figure 6.25
Pipe
withHoles
-Primitives
142
Figure
6.26
Pipe
withHoles
Solid
afterBoundary
Evaluation
143
Figure
6.27
Pipe
withHoles
-Plate
Segment
Representation
143
Figure
6.28
Mesh
ofPipe
withHoles
144
Figure 6.29
Mesh
ofPipe
withHoles
144
Figure
6.30
Bracket
~Primitives
145
Figure
6.3
1
Bracket
-Solid
after
Boundary
Evaluation
146
Figure 6.32
Bracket
-Plate Segment Representation
147
Figure
6.33
Bracket
-Plate Segment Representation (End
View)
147
Figure 6.34
Bracket
-Mesh
148
Figure
6.35
Bracket
~Mesh
(End
View)
148
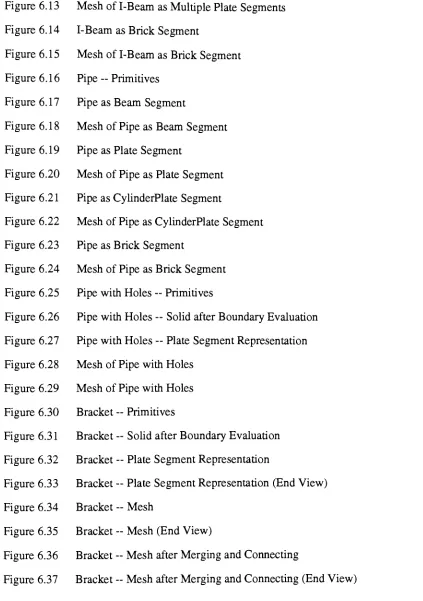
Figure
6.36
Bracket
-Mesh
after
Merging
andConnecting
149
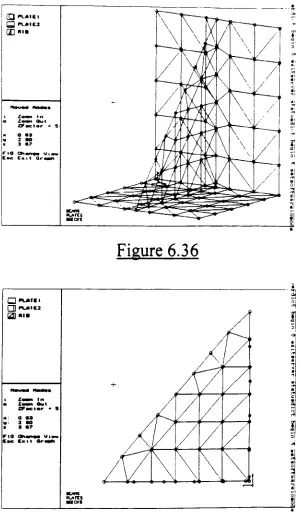
Figure
6.37
Bracket
--Mesh
[image:13.563.55.478.45.646.2]List
ofSymbols
Bold
letters
Vector
orMatrix
a unknown parameter
in
approximationfunction
A
Differential
operatorB(v,u)
Bilinear
functional
ofuand vBLO
Block
primitiveCON
Cone
primitiveCSG
Constructive Solid
Geometry
CYL
Cylinder
primitiveDIP
Difference
operationDOF
Degree
ofFreedom
e
Typical
Element
E
Modulus
ofElasticity
(Young's
Modulus)
EBC
Essential
Boundary
Condition
/
forcing
function
F(e)
Force Vector
for
element eFEA
Finite Element Analysis
FEM
Finite Element Method
G
Shear
Modulus
INT
Intersection
operationIxx
Moment
ofInertia
about x-axisIxy
Product
ofInertia
Iyy
Moment
ofInertia
about y-axisJ
Polar Moment
ofInertia
K(e)
Stiffness
Matrix
for
elemente
l(y)
Linear
functional
ofvM[X,
S]
Classify
X
againstS
MCR
Membership
Classification Result
NBC
Natural
Boundary
Condition
PADL
Part
andAssembly
Description (or
Definition)
Language
RSD
Recursive Spatial Decomposition
SPH
Sphere
primitiveTOR
Torus
primitiveu unknown
function
UN
Union
operationWED
Wedge
primitivev test
function
1. Introduction
1.1. The Finite
Element Method
in Mechanical
Engineering
In
today'shighly
competitiveworld, products mustbe
designed
very
carefully.Modern
engineers must ensurethat theirdesigns
willbe
functional,
last
when subjecttohard
use and extremeconditions,
be
attractive andpleasing
to the user, achievehigh
standards
in
termsofsafety,
and willsatisfy
a multitude of other consumerdemands.
In
additiontoall ofthese
requirements,
designs
mustbe
cost-effective as well.Fortunately,
a moderndesign
engineeris
not requiredtoproduce a prototype ofeach of
his design
alternativesto submittotesting
of allthenecessary
criteria.This surely
wouldnot
be
cost effective.There
are severaltechniquesavailablein
whichtheengineercan represent
his design
mathematically
to testvarious parameters.One
ofthemostpowerful, and
certainly
themostpopular,is
theFinite Element Method
(FEM).
In
theFinite Element
Method,
a complexgeometry is broken down into
afinite
numberof simple geometricshapes, called
finite
elements.The
material properties andgoverning
relationships(usually
a set ofdifferential equations)
areexpressed overtheseelementstoyield a system of equations.
These
equations canbe
solvedtogivethe1.2.
History
oftheFinite
Element
Method
The
idea
ofrepresenting
a givendomain
with anumber ofsimple geometric shapesis
not new.Ancient
mathematiciansestimatedthevalue of pi accurateto40
placesby
representing
a circle with alarge
number oftriangles as shownin figure
1
.1
Typical
"element"h
Ae=
4rbh
Figure
1.1
In
moderntimes,
thebasic ideas
ofthefinite
element method originatedin
theaircraft
industry,
where wings andfuselages
were represented as collections ofstrings,
skins, and shear panels.
In
1941,
HrenikofT
presented the"frame-work
method,"[11in
whichplane elastic regions were modeled
using
acollectionofbars
andbeams. The
useof piecewise continuous
functions dates
to1943,
whenCourant
useda collection oftriangularelements andtheprinciple of minimum potential
energy
tostudy
theSt. Venant
Torsion
problem.121The formal
presentationofthefinite
element methodis
attributedto
Turner, Clough, Martin,
andTopp,
whoin
1956
derived
stiffness matricesfor
truss,
beam,
and otherelements,!31 andtoArgyris
andKelsey,
who wrotetheirpaper onEnergy
Theorems
andStructural Analysis
in
1960.[4]The
term"finite
element"was
first
coinedIn
theearly
1960's,
engineersused thefinite
element methodtofind
approximatesolutionsto problems
in
stressanalysis,
fluid
flow,
heat
transfer,
and other areas.The
first
book
onfinite
elementsby
Ziekiewicz
andChung
was published on 1967.[5]In
thelate
1960's
andearly
1970's,
thefinite
element method was appliedtonon-linear problemsandlarge deformations.
A
book
on non-linear continuaby
Oden
appearedin 1972.
[6]Mathematical
foundations
werelaid in
the1970's,
including
elementdevelopment,
convergence
studies,
and other related studies.Since its
inception,
theliterature
onthefinite
element methodhas
grownexponentially,
andtoday
thereare numerousjournals
whicharedevoted primarily
to thetheory
and application ofthefinite
element method.A
reviewofthehistorical
developments
andthebasic
theory
ofthemethod canbe found
in
dozens
oftextbooksthat1.3. Finite
Element
Theory
As
withany
numericaltechnique,
anunderstanding
oftheunderlying
principlesof theFEM
is necessary in
ordertousethemethod effectively.However,
it
would notbe
practicaltoinclude
athoroughdiscussion
ofthetheory
ofthefinite
element methodin
thisthesis.
Volumes
upon volumeshave been
written aboutthetheory
and application ofthefinite
elementmethod.The
purpose ofthis thesisis
toexplorethearea of automatic meshgeneration, and notto explain
fully
thetheory
and concepts ofthefinite
element method.Thus,
the subject offinite
elementtheory
willbe limited
to abrief summary discussion.
The Finite Element Method
is
a piecewiseapplicationof avariationalmethod.A
typicalprobleminvolves
somedomain
Q,
defined
by
aboundary
T,
overwhich somemathematical relations
hold.
The
objectiveofthe analysisis
todetermine
unknownfunctions
whichsatisfy
themathematical relations(usually
differential equations)
overthedomain. Figure 1.2
shows a genericdomain
Q.
overwhicha set ofdifferential
equationsdescribe
thebehavior.
Boundary J7
Applied
Force
Governing
Equation: Au
=f
A
= differentialoperator u = unknownfunction
f
=forcing
function
Edge Fixed
In
ordertomake use ofthefinite
elementmethod, thegoverning
equationsdescribing
thebehavior
ofthedomain
mustbe
castin
"weak"(or
variational)
form. The
differential
equationAw
=/is saidtobe in
the"strong"form,
meaning
thatthe equationrepresents an exact statementat
every
pointin
thedomain.
To
obtaintheweakform,
testfunctions
(represented
by
"v")
mustbe
chosen which aresufficiently differentiable
andwhichtakeonthevalue zero at
Essential
Boundary
Condition
(EBC)
locations.
Both
sides ofthestrong form
are multipliedby
the testfunction
vandthenintegrated
overthedomain,
yielding
j(Au-f)vdQ
=0.
aAn analogy
whichhelps
tomaketheconcepts of"strong" and "weak"forms
more clearis
that of some simplefunction,
say
g(x).The
statementg(x)
=0
for 0
< x <L
is
a
strong
statement.It
saysthatatevery
pointbetween
0
andL,
thevalue ofg
is
identically
zero.However,
thestatement\g(x)dx
=0
is
a muchweakerstatement.It
allowsthevalue of
g
tobe
something
otherthanzerobetween
0
andL,
aslong
astheaverage value overthedomain is
zero.This forces
thearbitrary
function
g(x)
toapproximate zero asclosely
as possiblebetween
0
andL. This
is
shownin figure
1.3.
*00
g(*)=
o
utmr,^_^^jt
strong statement
g
i ^ i
L
x0
gCO*0
L
g(x)dx =
0
"weak"
statement
L
xAfter
thedifferential
equationis
castin
weakform,
thenextstep is
tointegrate
by
partstotransferthe
differentiation from
thedependent
variableuto thetestfunction
v.This
servestoreducethedifferentiation
requirementonu,
whichallowslower-order
functions
tobe
usedtoapproximatethebehavior
ofthesystem.In
theprocess ofintegrating by
parts,
boundary
termsare obtainedwhichidentify
thenature oftheboundary
conditionsin
thesolution.By
setting
v=0
at
Essential
Boundary
Condition
(EBC) locations,
anddefining
secondary
variables atNatural
Boundary
Condition
(NBC)
locations,
theboundary
conditionsbecome imposed into
thefunctional.
The
weakform becomes
thusposed as:find
u suchthatB(w,v)
-/(v)
for
alltestfunctions
vsuchthatv=0
at
EBC
locations,
whereB
is
bilinear functional representing
theweak
form
and/ is
linear
functional
representing
theboundary
terms.This
processwillbe
shownmoreclearly
asit is
usedtodevelop
element equations1.4. Types
andUses
ofFinite
Elements
The
finite
elementmethodis
applicabletocountless problems posed onmany
domains.
Each
typeof problem and eachdomain have
theirownunique set of equations.In
thissection afew
problemswillbe
consideredtodemonstrate
therequirementsfor
casting
an equationin
variationalform
over adomain.
1.4.1.
One-Dimensional Second-Order
Equations
Consider
the problem offinding
thefunction
u whichsatisfiestheequationd_
dx
'&'-applied overthe
domain
0
< x <L,
andtheboundary
conditionsw(0)
=0
anda^\ =
P
, where a =
a(x),f=f[x)
andP
are givendata
oftheproblem.This
x=L
dx
equation arises
in
theaxialdeformation
of abar.
The
domain
Q=(0, L)
ofthe problem, shownin figure
1.4(a),
is divided into
a set ofline
elements, calledthefinite
elementmesh, as shownin
figure
1.4(b).
p
(a)
Physical
Problem
nodes
p
(b)
Finite
Element
Mesh
Since
thegoverning
differential
equationis
valid overthewholedomain O
=(0,L),
it is
valid overeachelementofthefinite
element mesh.In particular,
it is
validovergeneric element e.
Following
theproceduredescribed
in
section1.3,
thevariationalformulation
ofthegoverning
differential
equation canbe
constructed over element e:The
strong form is
givenby
\a
]-/=
0
overthedomain
of element e,dx\ dx)
Qe
=(*A,*B)
as shownin
figure
1.5.
local
node1
u(xA)-u[e)
(--)
-tf>
O
local
node2
u(xB)-u^
x=
xft
(--)
s PM
x=x.
ilf
Figure 1.5
Multiplying
by
the testfunction
vandintegrating
overthedomain
yieldstheweakform:
Jxa
d(
du
, ,a\-f
dx
dx
ctx=
0
Integrating
by
partstotransferthedifferentiation
from
theunknownfunction
utothetest
function
vgives:)x\
dx dx
)
-a-du
Examining
theboundary
termin
theabove equation shows that thespecification ofu at x =
x and x =
xB
constitutetheessentialboundary
conditions,
andthespecification1
~a~dY
Iat X =
*A
X =Xb
constltutetnenaturalboundary
conditionsfor
theelement.
Thus,
thebasic
unknowns atthe element nodes aretheprimary
variableu, whichis
thedegree
offreedom
(DOF),
and thesecondary
variableI
-a)
To simplify
thewriting
oftheequations,
let
u(xa)
=udu\
-a
.
dx)
,() - ,,,
eP,W
u(xb)
=U2du
+a-dx
=P:(e) XB
Substituting
thisnotationinto
thevariationalform
givesJxA\
dx dx
)
v(xa)-Piwv(xb)
=
0
fxsf a\
du
\ orB(v,w)
-/(v)
=0
where
B(v,w)
is
thebilinear
form
givenby B(v,u)
= a axJx\
dx
dx)
and
/(v)
is
thelinear form
givenby
/(v)
=[
vfdx+v(xa)Pim+v(xs)P2(e) JXA
To
find
an approximate solutionto theabovevariationalproblemusing
theGalerkin
method,
thefunction
uis
approximated overtheelementby
n.(x)
=2>(V,)(.t)
tt
(*
^^
AK
&,/dx
~ p,wv^
PiWv,(x,)
=By
defining
thelocal
stiffnessmatrix,
K,
andthelocal force
vector,F,
asfollows,
K,"
=
B(V.,V,)=ra^*
JjM GDC &
F,(c)
=
/(Vl)
=J"v|/'/A
+P*(e)V'(xa)
+Pi(e)v|/,(xrB)
theabove equation can
be
writtenconcisely in
matrixform:
[K(c)]{a(e)}
={F(e)}.
All
that remainsis
to constructtheapproximationfunctions,
\j/..These
functions
are constructed
using
theconditions mentionedin
section1.3.
Namely,
theselectedfunctions
mustbe sufficiently differentiable
andsatisfy
the essentialboundary
conditions ofthe element.
They
must alsobe
linearly
independent
and complete.Three
oftheseconditions are met
if
wechoose alinear
approximation oftheform
ue(x)
=cl
+ c2x.In
orderto
satisfy
theremaining
requirement, we requireue
tosatisfy
theEBC
oftheelement.
Thus,
ci+ cixa =
u(xa)
=m(e)c\+cixb
-u(xb)
= U2(e)Solving
for
ct
andc2
in
terms ofu^
and 2(e)yieldsUXWXB-U.WXA
2W-I/1W
C\ = Cl
By
substituting
andcollecting coefficients,
it
canbe
shownthatue(x)
=^
Ui{e)\\i,{e i=\where \j/i(e) =
xb-x
VJ/2W =
X-Xa
, and x. < x <xE.
This
expression satisfiestheXB-Xa
Xb-Xa
essential
boundary
conditions ofthe element, andthe approximationfunctions
(v|/()
arecontinuous and
linearly
independent
overtheelement.These
interpolationfunctions
for
the two-node
linear
element are shownin figure
1.6.
Using
theseinterpolation functions
to approximatethe
dependent
variable, thefollowing
matrix equationsareobtained:M=r
1
-1-1
1
[F(c)}
=h
2
ll +where
he
is
thelength
oftheelement(xB
- xA).All
thatremainsis
toassembletheequations
derived for
each elementinto
theglobalfinite
elementformulation.
This
process
is
straightforwardandis
similarfor
all elementtypes,
soit
will notbe
discussed
here.
1.4.2.
One-Dimensional Fourth-Order Equations
Consider
theproblem offinding
thefunction
uwhich satisfiestheequationdx2\
dx2 Japplied overthe
domain
0
< x <L,
whereb
=b(x)
and/=fix)
arethegivendata
ofthe problem.This
case arisesin
thebending
ofbeams.
As in
the second-ordercase, thedomain is
discretized
into
subintervals, as shownin figure
1.7.
nodes
M0
(a)
Physical Problem
(b)
Finite Element Mesh
Figure
1.7
The
variationalform
over atypicalelement eis
givenby
J-v
JXA dx2
j
Integrating
twiceby
partsto transferhalf
ofthedifferentiation
from
wto vyieldsr*B[
d2v
d2w
U
+vfdx
+v-dx
d2w
'dx2
dv
.d2w
b
dx
dx2dw
Inspection
oftheboundary
termsindicates
that thespecification ofwand atx =x.
dx
and x =
xB
constitutetheEBC,
andthespecification ofd(,d2w^
dx
dx2. Ld2w
and
b
-atx=x,
dx2 A
andx =
xB
constitutetheNBC for
theelement.Thus,
thebasic
unknownsattheelementnodesarethe
primary
variables,whichfor
notational conveniencewillbe
writtenas,00_
wv ' =
w(xa)
so ^_<^_
dx
e.w = W2W =W(XB)dx
andthe
secondary
variables, which willbe
writtenas*
dx
{
dx2)
Q2M=bd a
2w
be2 X=XA () _ Q.w-1
d
w >dx
Q*w=b
d2w
dx2dx2
In
thecase ofthebending
ofbeams,
theprimary
variables,wand0,
representdisplacement
androtation, whicharetheDOF
ofthe element, whilethesecondary
variables,
Ql3
andQ24,
representshearforces
andbending
moments.Substituting
this,
d2v
d2w
B(v'w>
=Lb^^dx
l(v)
= -f'vfdx+v(xA)Qi(e) JXA Q2Ce)-v(xs)Q3w +'dv
^dx Q4(e)The
variationalform
requiresthattheinterpolation
functions
be
continuous withcontinuous
derivatives
up
toorder3
(so
thatQt
andQ3
arenonzero), and thatthey
allowtheapproximation
for
wtosatisfy
theEBC.
Since
thereareatotaloffour
conditionsin
anelement, a
four
parameterpolynomialis
selectedfor
wg:wg(x)
=ct
+ c^x +c3x2
+ c^x3.
Forcing
the constraints(EBCs),
wegetthesystem ofequations1
XaXa2
0
-1 -2xa1
XBXB1
0
-1 -2xb -3x XA1'
Cl W\
3XA2
C201
i r=i > XSJ
C3 W2
3xs2_
C402
Solving
for
thec/sin
termsofwv
wv
0p
and02,
andsubstituting
theresultsback
into
wg
givesthe
interpolation functions:
Y|/lW=l-3,oo _i_il x XA i +2 XB-XA X-Xa
\
xb-xaJ yxB-XA 2 H/3W =3
XB-XAX-Xa
\
J
X-XAV|/400 =
-(x-x^)
x-x^ ^XB-X/f,
.2
X-Xa
These interpolation
functions
are shownin figure
1.8.
Figure 1.8
Using
theseinterpolation
functions,
thefollowing
element matrices result:Kh
6
-3h -6 -3h-3h 2h2
3/;
h2-6
3h
6
3/j
-3h h2
3h
2h2l*W]-Z
12
[6]
\QA
-h
6
+<h
[Q*\
wheretheelement
displacement
vectoris
givenby
[u(e)}
=MM
01
M>2
02
1.4.3. Two-Dimensional
Scalar Valued
Second-Order Equations
Consider
theproblem offinding
theequation uwhichsatisfiesthesecond-orderpartial
differential
equation(PDE)
5
(
bu
bu\
b
f
bu
busan van a2i 1-022
bxy
Sx
by)
by\
5x
by
+aoou-f=0
applied oversome
2-dimensional
regionQ,
as shownin figure
1.9,
where a =a
(x)
and/
=fix)
arethegivendata
oftheproblem.This
equation arisesin
2-dimensionalheat
transfer
in
anisotropic
medium.Boundary f
Finite Element
Mesh
Figure
1.9
The
variationalform is
givenby
J*
(
bx
bu
5a|
5
an +ai2
\-bx
by
J
by
(
bu
bu]
,#21 +022
\
+aoou-tbx
by)
dxdy
=
0.
Integration
by
parts(with
somehelp
from
thedivergence
theorem)
yields:a'"L
Sv(
Su Su8v[
5o 8mf
Su Su(
Su SuYan+
ai2 h 021 hau
8y^
8jcSyj
+ aoovu -vfdxdy- iv
J
r<"nx\ an \-an
{
SxSyj
+"{a2%
+a2%[
ds=0where
nx
andny
arethex andv componentsoftheunit normalne
ontheboundary Te,
andds is
the arclength
of aninfinitesimal
piece oftheboundary.
Inspection
oftheboundary
termshowsthatspecification ofuconstitutestheEBC
andthespecification of* an + an +hJ a2i -\-a22
(which
willbe
referred^
5x
by)
{
bx
by)
to as
qn)
constitutestheNBC
oftheformulation.
Thus,
uis
theprimary
variableandqn
is
the
secondary
variable.In
thecase ofheat
transferin
anisotropic
medium, uwouldrepresenttemperatureand
qn
wouldrepresentheat flux
acrosstheelementboundary.
Using
thisnotation,
thevariationalform
canbe
writtenasJ
n>L5v
5x
bu
bu
an1-012-8x
by)
by
+
-5v
bu
bu\
ra2\
1-#22
\
+ aoovu -vfbx
by
)
dxdy
-<j>vqnds=
0
.The
variationalform indicates
thatumay
be
approximatedby
ue=^
,v|/, whereu ;=iarethevalues of u atthepoint
(x,
v),and w arelinear interpolation functions. The
specific
forms
of\\/.depend
onthe typeofelementused.Substituting
thisapproximationinto
thevariationalformulation for
u and vj/for
vgives K/Ve) =F,w where
8\)/i
5x
'b\\lj
b\\lj
\
b\\li
f
b\\lj
8\|/;
^
an
-+a.2 - +-
a2i-r-+fl22-+aoo\|/(\|/>
5x
by
)
by
\
bx
by
)
dxdy
E(e) =
J
y.fdxdy
+As
mentionedabove, theform
oftheinterpolation functions
\\idepend
ontheelementtype.
For
three-nodetriangles,
threelinearly
independent
terms arerequired, sothe
interpolation
function
couldtakeontheform
u(xy)
=ct
+ CjX + c^y.For
afour-node
quadrilateral, the
form
u(xy)
=cL
+ c^c + c^y+ c4xycouldbe
used.Higher
orderfunctions,
suchasu(xy)
-Cj
+ c2x +c^y
+ c4xv + c5(x2+y2)
andu(xy)
=cl
+c^c+c^y
+c4xy + c5x2 + c^y2 could
be
usedfor higher
orderelements, suchas aquadrilateral withafifth
nodeatits
center,
or a six-nodetrianglewithnodes atits
cornersandmid-sides.Examples
of3, 4,
5,
and6
node2D
elements are shownin
figure
1. 10.
3
-node4
-node5
-node6-node
Figure
1.10
By
solving
for
theconstantsc,and substituting, theinterpolation
functions
for
three-node triangleelements are
found
tobe:
yi=
((x2
V3-X3
V2)
+(>>2
-V3)x+
(xs
-x.)y)
2A
\|/2=
((x3Vi-xiV3)
+(v3-
yi)x+{x\-X3)y)
2A
^3=
((xi
V2-X2
vi)
+{yi
-V2)x+
(x2
-xi)y)
2. Aewhere
Ae
is
the area ofthe element, and(x(
y)
arethecoordinatesof nodei.
These
Figure 1.11
The
interpolation functions
for
thequadrilateral elementturnouttobe
{&l)
=fi-i]
V
a)
1--2
V
a)
1
b
if
wetake(,
n)
torepresent alocal
coordinate system on a master rectangular element withsidesa andb,
as shownin figure
1.12.
T
}
node3
r
b
nodt4
node2
node1
a ?
Figure 1.12
The
interpolation functions
for
afour-node
quadrilateral element are shownin
figure
1.13.
node4
HI
node 1
node3
node2
node4
%
node1
node3
node2
node4 m
oefl ^r/node3 node
1^^^(
K'node2
node4
node
node3
node2
Computation
ofthestiffness matricesfor
2
dimensional
elementsby
exactintegration is
not easy.Generally,
theelement matrices are computedusing
numerical1.4.4.
Two-Dimensional
Multi-Variable Equations
In
theprevioussection,
thefinite
element analysisofsecond-order,
twodimensional
problemsthatinvolved
only
onedependent
unknown was considered.Often,
an engineer mustface
a system of coupled partialdifferential
equationsin
asmany
dependent
variables asthenumber ofequations.Examples
oftwo-dimensionalproblemsin
whichcoupleddifferential
equations ariseinclude
plane elasticdeformation
of alinear
elastic
solid,
theflow
of anincompressible
viscousfluid,
andthebending
of elastic plateswithtransverse shear strains.[7]
The
equationsdescribing
thebehavior
ofa plate underplane stress
loading
canbe
writtenas:8
(
E
bu
oESv
Sx
-h
+
l-u2Sx
l-u28vj
2(l
+o)Svh-h-
8
(bu
bv\
, n+
-fx
=0
by
bx)
8
(bu
Sv^l
8
(+
2(l
+o)8xl8vSxJ
by
oE
bu
E
8v
+
-l-o28x
l-u28vj
h-fy
=
0
where
h is
theplatethickness,
E
is
themodulus ofelasticity,
and uis
thePoisson's
ratio oftheplate material.
These
equations wouldbe
slightly
different for
theplane strain case, andfor
theaxisymmetric case.Each
nodein
thefinite
element mesh wouldhave
2
degrees
offreedom:
translationin
thexandy directions.
Thus,
athree-nodetriangleelement wouldhave
6
DOF,
and afour-node
quadrilateral wouldhave
8
DOF. The
element stiffness matricesin
this case willbe
quitelarge,
andlike
the2D
scalar valuedcase, aregenerally
computedusing
numerical1.4.5.
Three-Dimensional Equations
Consider
the problem offinding
thefunction
uwhich satisfiesthepartialdifferential
equationf
8^
bxy
bx)
byy
by
j5
r*,^l-A
8
(
,bu
bz\
3Sz
'
where
ki
=&(x,
y,z)
mdf=fix, y,z)
are givenfunctions
ofpositionin
athree-dimensionaldomain
Q.
The domain
is divided into
somethree-dimensional elements, suchastetrahedrons,
wedges, orbricks,
shownin figure
1.14.
<A
&
o.^
Figure 1.14
The
element matrices requiretheuse ofinterpolation
functions
thatare atleast
linear in
x, y,
and z.The assembly
ofequations, theimposition
ofboundary
conditions,andthesolution ofthe equations are
completely
analogoustothosedescribed in
the1.5.
Modeling
using
Multiple Element
Types
The
elementsand equationsderived in
theprevious sections arebut
a smallfraction
ofthoseavailableto an engineerperforming
afinite
element analysis.As
wasdemonstrated,
each elementis
painstakingly developed
overacertaindomain
for
a certaintypeof application.
Therefore,
it
wouldbe
wisetousetheseelementsin
themannerfor
which
they
weredeveloped. Structures
whicharetobe
analyzedusing
theFEM
areoftennot representable
by
a singletypeof element.While
certain regionsofthestructuremay
be best
representedby
a particulartypeofelement,
thatelementtypemay
notbe
at allappropriate
for
other regionsofthestructure.For
example,to modela simpletable, it
would
be impossible
to choose a singletypeof elementtoperformtheanalysis.If
theentiretableweremodeled
using 3D
elements such astetrahedraorbricks,
thecostofperforming
theanalysisin
termsofcomputertimeand storage wouldbe
astronomical.Instead,
the analyst would choosebeam
elementstorepresentthe table'slegs
and plateelementsto represent
its top,
as shownin figure
1.15.
plate element
beam
element1.6. Thesis
Objective
The
objectiveofthis thesisprojectis
todevelop
a computer programto performautomatic
meshing
of structuresusing
different
elementtypeswhereappropriate.lust
asan analystwithcommon sense would
apply
beam
elementsin
long,
narrow sections ofthestructure and plate elements
in
flat
sections ofthestructure, so shouldtheproposedcomputerprogram.
An
additional requirement oftheproposed programis
tobe
abletomeshthesamestructure
in
severaldifferent
ways attheuser'sdiscretion.
In
ordertogeneratebeam,
plate, and
brick
elementsin
a commercial program such asANSYS,
theusermustdefine
geometries
using
lines,
areas, andvolumes, respectively.There
is
noway for
theusertodefine
ageometry
once, and thenmeshit
using different
elementtypes.If
amodelis
designed
tobe
meshedwith3D elements,
andtheanalyst changeshis
mind anddecides
touse
2D elements,
theentire model mustbe discarded
and a new onebegun
which willallowthegeneration ofthe
desired
mesh.The
programwrittenin
this thesisprojectshould
be
ableto meshthesame geometricmodelin
different
ways, thussaving
valuable2.
Automatic Mesh
Generation:
Review
ofRelated
Literature
Since
thefinite
element methodhas become
such animportant
toolin
modernengineering,
researchersarestriving
to makethebest
possible use ofthemethod.Currently,
thearea ofautomatic mesh generationis
being
very
heavily
researched.Current
research effortsinto
mesh generationfocus
ondeveloping_/w//y
automatic meshgeneration techniques.
A
fully
automatictechniqueis
onein
whichonly
theobjectgeometry
andtopology
and meshattributesarerequired asinput.'812.1.
History
ofMesh
Generation
In
theearly
days
oftheFEM,
analysts were requiredtomanually
create meshes.This
involved
defining
each andevery
node and elementin
the model.Specifically,
for
each element
is
wasnecessary
tospecify
shape(triangle,
quadrilateral,
tetrahedron,
hexahedron,
etc.),
vertices(by
nodenumber),
coordinates ofvertices,physical attributesofvertices, edges, andsurfaces, and sub-domain
(element)
number.Furthermore,
thefinite
element analysis was abatch
process,
and nofeedback
was availabletoindicate
errors
during
model construction.It
wasonly
aftertheanalysis was run andtheresultsbecame
suspectthattheanalyst wouldgoback
and checkthevalidity
ofthemodel.Thus,
the
finite
element method could notbe
practicalfor large
or complex problems.Naturally,
researcherstried toimprove
theprocessby
providing
a graphicsinterface
during
mesh generation andautomating
themesh generationprocess.In
thelate
1960's,
methods were suggestedfor
automatically
determining
thecoordinates ofinterior
nodes
based
oninterpolation
schemes appliedto theboundary
nodes.By
theearly
1970's,
pre-processors withgraphicscapabilities
had
emerged.The introduction
oflow-cost,
high-resolution
machinesin
thelate 1970's
produced adramatic
changein
theway
meshesweregenerated and checked.
Some
oftheearliestfinite
element modelers werePDA
Engineering's
"PATRAN,"and
SDRC's
"GEOMOD/SUPERTAB."During
thelate
1970's
and
early
1980's,
theMacNeal-Schwendler
Corporation's
"MSGMESH"gained
popularity.
This pre-processor,
withwhichit
was possibleto create modelsfor
analysisusing
MSC/NASTRAN,
included
methodsfor
generating
nodes and elementsby
simplemapping
techniquesapplied overlinear
quadrilateral andhexahedral
"grid
pointfields.
"[9]Most
commercially
availablefinite
element programstoday
include
pre-processorswith
interactive
or semi-automatic mesh generation methods.To
generate a meshusing
these methods, theusermust
first divide
thegeometry
into
simple mapable regions, suchas quadrilaterals or
hexahedrons.
The
usermusttheninsure
thatthemeshwillbe
continuous across region
boundaries.
The
individual
regions wouldthenbe
meshedusing
transport
mapping
techniques.Today,
breakthroughs
arebeing
madein
fully
automatic meshgeneration.Several
algorithms are availableto mesh
arbitrary 2D
planarregions, and3D
mesh generationalgorithmsare
continually
becoming
more robust.2.2. Automatic
Meshing
ofID
Regions
The
meshing
ofID
(Beam-like)
regionsis
trivial.All
thatis
requiredis
todivide
the
domain
into
a number ofline
segments,each segmentbeing
an elementwitha node at2.3.
Automatic
Meshing
of2D
Regions
Robust
automaticmeshgenerationalgorithmsfor
2D
regions are nowwidely
available.
Most
ofthefully
automaticmethods canbe
groupedinto
threefamilies:
Volume
Triangulation
methods,
Element Extraction
methods,
andRecursive Spatial
Decomposition
methods.Other
semi-automaticmethodsdo
exist which are quite elegant.For example,
thegeneration of meshesby
thesolution of partialdifferential
equations canproduce
truly
beautiful
meshes.[10]However,
thismethod requiresuserinteraction
todefine
theequations,
andthereforeis
notfully
automatic.The
goal ofthis thesisis
automatic mesh
generation,
soonly
fully
automatic methodswillbe
considered.2.3.1.
Volume
Triangulation
Methods
Mesh
generatorsin
thiscategory
aretypically
referredtoasDelaunay
generators,because
they
usetheprinciple ofDelaunay
Triangulation. Numerous
authors,including
Cavendish[11],
Barnhill'121, Lawson'131,
Green
andSibson[I4),
Lewis
andRobinson115',
Lee[16],
Watson[17],
Bowyer1181,
Coulomb'191,
andGarg
and Budynas'201have investigated
mesh generators
based
onthis technique.The
method ofDelaunay
Triangulation
meshestheconvexhull
ofa set of points.The
set of pointsis
thecollection of nodesin
themodel theDelaunay
techniquedoes
not addressthe
issue
of node generation.Various
researchershave
developed
numerousmethods of
defining
nodes on whichtoperformDelaunay
Triangulation.
In
twodimensions,
the taskof nodedefinition
is
relatively
simple compared withthemuch greatertaskof
creating
a valid meshfrom
thesenodes.The
convexhull
of a set ofpoints(nodes)
is
theboundary
ofthesmallest convexdomain containing
the setofpoints'211Given
theset of pointsin
figure
2.
1(a),
the convexhull
canbe
thoughtof astheboundary
acquiredby
enclosing
theset of points with a"rubber
band,"as shown
in
figure
2.1(b).
"rubber
band"o
o 0
r 0
0 o
I
0 o0 o
o \ 0 ,
o o
setof points convex
hull
(a)
(b)
Figure 2.1
There
are severaltypesof algorithmsfor
performing
Delaunay
Triangulation.
One
ofthese
types,
known
asIncremental
algorithms'12'13,18],
constructthetriangulationby
starting
withany
node, andinserting
nodesone at atimeinto
themesh.Another
type,
Divide
andConquer
algorithms'15'16],
recursively
splittheset ofdata
pointsinto
equally
sized subsets until
elementary
subsets areobtained, andthenmergetheresulting
pieces.These
algorithms canfurther be
classifiedinto
one-step
andtwo-step
methods,based
on whetherthey
producethefinal
meshin
a singlestep, orwhetherthey
first
The
method utilizedin
thepresent workis
a modification ofWatson's
algorithm'171.
Watson's
algorithm meshes a given set of nodesthroughthefollowing
steps:
Step
:
Three
nodes(which
willbe
referredto as"StartNodes")
defining
atriangle are created suchthatthetriangleenclosesthegiven set of
nodes,
as shownin
figure
2.2(a).
This
triangleconstitutestheoriginal
mesh,
consisting
of one element andthreenodes(the
StartNodes).
The
circum-circleofthe triangleis
computed andstored.
(The
circum-circle of atriangleis
thecirclewhichpassesthrougheach ofthe triangles vertices, as shown
in figure
2.2(b).)
original mesh
(one
triangle)
(a)
Figure 2.2
Step
:
Insert nodes,
one at atime,
into
themesh.To insert
a node:(a)
Determine
whichtrianglesin
themeshcontainthenodebeing
(b)
Compute
thebounding
polygon oftheset oftrianglesfound
in
step
(a)
as shownin
figure
2.3(b)
by
removing
all trianglesidessharedby
twotriangles,
keeping
only
those thatare a part ofonly
onetriangle.
Make
alist
ofthenodes onthisbounding
polygon.(c)
Delete
the trianglesfound
in
(a)
from
themesh.(d)
Create
newtrianglesusing
thenodesfound
in
(b)
andthenodebeing
inserted,
as shownin
figure
2.3(c),
and addthemto themesh.Compute
and storethecircum-circles ofthesetriangles.Node
tobe Inserted
Tnangles
containing Node
within Circum-
Circles
Mesh
at sometime
(a)
Bounding
NewTriangll
Polygon
^(b)
(c)
Step
G>
:Repeat
Step
for
all nodes.Step
:
Delete
triangleswhich contain one ofthe threeStartNodes. The
remaining
trianglesaretheDelaunay
Triangulation
oftheconvexhull
ofthenodes,
as shownin figure
2.4.
Final Mesh
ofConvex Hull
Figure 2.4
Watson's
algorithmhas been
extendedin
thisworktobe
abletodetermine
whichtrianglesare
inside
and outsidethe geometry, sothatnon-convexdomains
withor withoutholes
canbe
meshed.Although
thisresult was accoplishedin
theworkafGarg'211,
thetechniqueused
in
this thesisis
completely different.
Meshes
createdby
Delaunay
Triangulation
have
theproperty
of optimalequiangularity.
This
meansthat themesh generatedfor
a set of pointsby Delaunay
Triangulation
containstriangleswhichare as equiangularas canbe
achievedwiththegiven points.
Thus,
the mesh containsthebest
shaped elements possiblefor
thegiven set2.3.2. Element Extraction
Methods
Element
Extraction
methods are alsoknown
asAdvancing
Front
methods, orsimply
asPaving
methods.This
class of meshgeneratorshas been investigated
by
George'221, Sadek'231, Lo'241,
Bui
andHanh'251,
andBlacker
etal.'261,
to name afew.
This
methodbegins
withtheobject'sboundary
andgeneratesnodes and elementsinward
from
theboundary
untiltheentiredomain is
discretized
into
elements.This
process can
be broken down
into
thefollowing
steps.Step
:
Initialize
thefront:
theobject'sboundary
is
represented as apolygonal
discretization
oftheactualboundary.
Step
:Analyze
thefront:
(a)
Determine
the"departure
zone,"the region where new elements
will
be
generated.(b)
Create
internal
points and elements.Step
G>
:Update
thefront.
Step
:
Repeat
Steps
andG)
untilfront
is
null(entire
domain has been
meshed).
Figure
2.5
shows an object at various stages ofmeshing
by
apaving
algorithm.Here,
thezone ofdeparture is
determined
by
examining
theentirefront.
Figure
2.6
shows