Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
10-1-1993
A DSP based general self-tuning observer
controller
John F. Seward
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
A DSP BASED GENERAL SELF-TUNING OBSERVER
CONTROLLER
by
John F. Seward, Jr.
A Thesis Submitted
In
Partial Fulfillment
of the
Requirements for the Degree of
MASTER OF SCIENCE
In
Electrical Engineering
Approved by:
(4) Signatures Illegible
DEPARTMENT OF ELECTRICAL ENGINEERING
COLLEGE OF ENGINEERING
Abstract
This
treatise
presents animplementation
of aGeneral
Self-Tuning
Observer
Controller
(GSTOC)
for
adaptivevelocity
controlusing
aTMS320C25 Digital
Signal Processor
(DSP).
The GSTOC
is
a structurebased
on modern controlstate-space
theories,
such asKalman filters
usedassteady
state ortime-varying
optimal stateestimators,
full
statefeedback
using
pole placement orTABLE OF CONTENTS
Chapter
page1.
INTRODUCTION
7
2.
ADAPTIVE CONTROL AND THE SELF-TUNING
REGULATOR
.103.
GSTOC DESIGN
17
3.1
Parameter Identification
17
3.2
Kalman Filter
(Optimum
Observer)
24
3.3
Control Law
34
4.
PLANT
DESCRIPTION
41
4.1
Plant
41
4.2
Mathematical Model
43
5.
DSP IMPLEMENTATION
46
5.1
Parameter Identification
46
5.2
Kalman
Filtering
46
5.3
Control Law
47
5.4
Scaling
47
5.5
Division
48
6.
HARDWARE DESCRIPTION
50
7.
DSP CODE
51
8.
RESULTS
54
9.
CONCLUSIONS
62
10.
REFERENCES
64
11.
SOFTWARE LISTINGS
66
ESTSTATE.LST
78
POLEP.LST
82
LIST OF
TABLES
LIST OF FIGURES
1
.Model
reference adaptive control system11
2.
Self-tuning
regulator12
3.
Implicit
self-tuning
regulator13
4.
Explicit
self-tuning
regulator14
5.
General
self-tuning
observer controller15
6.
LJE DC Motor
module42
7.
System Configuration
50
8.
Open
loop
response56
9.
Closed
loop
response57
10.
Closed
loop
responselOmSec
sampling rate,
closedloop
pole at0.7
. .58
11.
Closed
loop
responselOmSec
sampling
rate,
closedloop
pole at0.5
. .59
1.
INTRODUCTION
In
modern controltheory,
adaptive controlis
animportant
area.Adaptive
control
has
been
aroundfor
atleast
four
decades.
In
the
1950s,
adaptivecontrolsystems were used
to
optimizethe
performanceofinternal
combustionengines andasautopilots
for high
performance aircraft.State
spaceandstability theories
and majordevelopments
in
systemidentification
and parameterestimation,
which contributedto
adaptivecontrol,
evolvedin
the
1960s.
The 1970s
brought
around a muchbetter
understanding
ofthe
underlying
principlesofthe
design
andoperation of adaptivecontrolsystems.Different
estimationschemes were combined with variousdesign
methodsto
implement
adaptive control.The
minicomputer alsohad
become
a prominenttool
for
adaptivecontrolapplications.Soon
afterthe
basic
theory
ofself-tuning,
researchedby
Astrom
andWittenmark
(1973),
minicomputerapplications were
implemented
into industry.
Some
ofthese
applicationsincluded:
ore-crushing (Borisson
andSyding,
1976),
ship-steering (Kallstrom
et
al,
1977),
paper-making (Cegrell
andHedqvist,
1975),
cement-blending
(Keviczky
etal,
1978),
andmany
others.The
Digital
Signal
Processor
(DSP)
wasintroduced
during
the
1980s. The DSP
has
broaden the
opportunitiesto
incorporate
adigital
controlsolutionoverananalog
onein
arapidly growing
market,
suchasin
robotics,
disk
and servocontrolandautomotive engine control.
With
50
nSecinstruction
cycletimes
andspecial
instructions
suchas,
DMOV (data
move)to
implement
the
delay
LT (load
multiplicand),
DMO
V,
MPY
(multiply)
andAPAC (add
resultto
accumulator)
that
executein
oneinstruction
cycle,
high
performance,
sophisticated
digital
controlalgorithms,
such asthe
onesfrom
modern controltheory
canbe
implemented
on aDSP
very
easily.A DSP
canimplement
the
state
controller, the
parameter estimator andthe
stateestimator,
ofanadaptive controller
in
realtime.
This
paper presents animplementation
of an adaptive controllerusing
moderncontrol
theories,
such as state estimation and statefeedback. The
adaptive controller willbe
aDSP based
regulatorto
controlthe velocity
ofaDC
servomotor.
The
servo motor willbe
subjectedto
load disturbances.
The
Texas
Instruments
TMS320C25
was chosento implement the
adaptive controllerbecause
ofits
fast
instruction
cycletime,
extended-precisionarithmetic andadaptive
filter
support.The
TMS320C25 is
capable ofexecuting ten
millioninstructions
per second(10 MIPS). This
throughput is
attainedby
meansofsingle-cycle multiply/accumulate
instructions
withadata
option(MAC/MACD),
eightauxiliary
registerswithadedicated
arithmeticunit,
instructions
set supportfor
adaptivefiltering
and extended-precisionarithmetic,
bit
reversaladdressing,
andfast
I/O
for data intensive
signalprocessing.
The
following
chapterwilldiscuss
adaptivecontrol and afew
ofthe
maintypes
ofadaptive regulatorsand
their
differences. Chapter 3
willdevelop
the
equationsfor
parameterestimation,
using the
Recursive
Least Squares
filter)
and statefeedback
using
Ackerman's formula
that
willbe
usedin
developing
the
General
Self-Tuning
Observer Controller
are alsodeveloped
in
Chapter
3.
The
plantdescription
ofthe
LJE
motortrainer
is
given andthe
state space mathematical model of
the
plantis
developed
in
Chapter
4.
DSP
implementation
ofthe
equationsfrom Chapter
3
are presentedin
Chapter
5,
along
withscaling
anddivision. A
description
ofthe
AIB
interface
board
is
given
in
Chapter 6.
Chapter
7
gives abrief description
ofthe
Software
Development System
usedto
develop
the
GSTOC. Organization
ofthe
algorithms written
for
the
GSTOC
and asummary
ofthe
executionload
onthe
DSP
is
givenis
also givenChapter 7. The
results ofthe
GSTOC
is
presentedin
2.
ADAPTIVE CONTROL
AND
THE
SELF-TUNING
REGULATOR
Over
the
years, there
have been
many
attemptsto
define
adaptive control.There
seemsto
be
ageneral consensusamong
researchers andpracticing
control engineers
that
adaptive control couldbe defined
asthe
control ofuncertain
systems,
with a controller structurethat
includes
a subsystemfor
the
on-line estimation of unknown parameters values or system structure anda subsystem
for
the
generation of suitable controlinputs
based
onthe
estimated values or system structure.
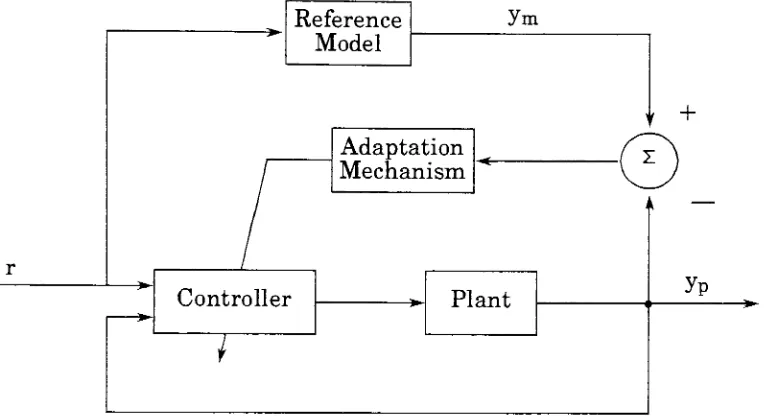
Two
principal approachesto
adaptive control areModel
Reference Adaptive
Control
(MRAC)
shownin
Fig. #1
andSelf-Tuning
Regulator
(STR)
shownin
Fig.
#2
[1].
The basic
principle ofMRAC
is
that the
performance ofthe
systemis
specifiedby
a model andthe
parameters ofthe
regulatorare adjustedbased
on
the
errorbetween
the
reference model andthe
system.MRAC
systems arerelatively easy to
implement
systemswithafairly
high
speed ofadaptation,
asthere
is
no needfor identification
the
plants parameters.As
shownin
Fig.
#1,
the
MRAC
system consistsof aninner
loop,
whichprovidesordinary
feedback
and an outer
loop,
whichadjuststhe
parametersofthe
inner
loop.
In
1973,
a majorbreakthrough in
the
field
of adaptive control wasintroduced
by
Astrom
andWittenmark,
the
idea
of a controllerthat
couldtune
itself
andactually
coinedthe
phrase'self
-tuning regulator'.The
originalself-tuning
regulator
(STR)
wasbased
on stochastic minimum-variance principles andleast
squareestimation.In
self-tuning,the
basic
procedureis
to
select adesign
Reference
Model
ym
Adaptation
Mechanism
Controller
Plant
t
+
0
A
yp
Figure
#1:
Model
reference adaptive control system(MRAC).
recursively
estimatedvalues ofthese
parameters.The idea
ofusing these
estimatesevenif
they
are notequalto the true
values(i.e.,
the
uncertainties are notconsidered)is
calledthe
certainty
equivalenceprinciple.STRs
are animportant
classofadaptive controllers.They
areeasy to
implement
and areapplicable
to
complexprocesses,
with a widevariety
ofcharacteristicsinvolving
unknownparameters,
the
presenceoftime-delay,
time varying
process
dynamics
andstochasticdisturbances.
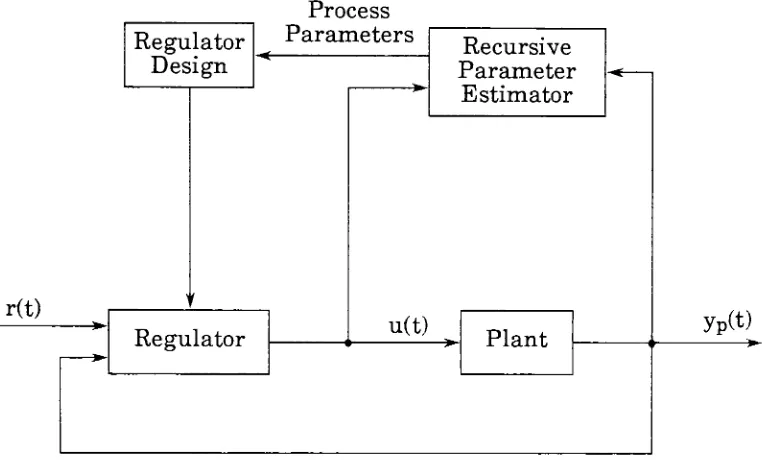
The
closedloop
systems [image:12.553.94.478.125.335.2]r(t)
Regulator
Design
Process
Parameters
Regulator
Recursive
Parameter
Estimator
u(t)
Plant
[image:13.553.93.474.92.323.2]yP(t)
Figure #2:
Self-tuning
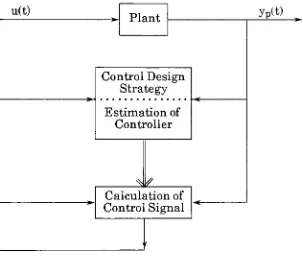
regulator.Two
approachesto self-tuning
arethe
implicit
ordirect
STR
algorithm andthe
explicit or
indirect
STR
algorithm.In
the
implicit STR
algorithm,
shownin
Fig.
#3,
the
regulatorparameters are updateddirectly.
Implicit
STRs
aredeveloped
onthe
basis
ofpredictivecontroltheory
and requireknowledge
ofthe
systemtime
delay.
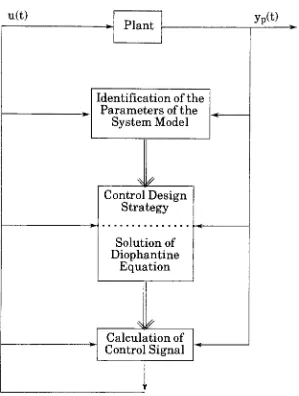
In
the
explicitSTR
algorithm,
shownin Fig.
#4,
the
regulator parameteridentification
is followed
by
a separatecontrollaw
calculation.The
systemtime
delay
canbe
estimatedas part ofthe
processdynamics. Explicit STRs
u(t)
Plant
yP(t)Control Design
Strategy
Estimation
ofController
^
Calculation
ofControl Signal
i '
Figure
#3:
Implicit
self-tuning
regulator. [image:14.553.161.464.102.358.2]u(t)
Plant
yP(t)Identification
ofthe
Parameters
ofthe
System Model
%.f
Control Design
Strategy
Solution
ofDiophantine
Equation
*
f
Calculation
ofControl Signal
[image:15.553.140.439.83.479.2]''
Figure #4:
Explicit
self-tuning
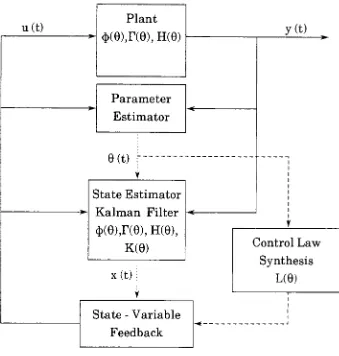
regulator.The
generalself-tuning
observer controller(GSTOC),
shownin
Fig.
#5,
is
aform
ofexplicitself-tuning
regulator whichis
based
on modern controlu(t)
Plant
4>(9),r(0),H(e)
Parameter
Estimator
9(t)
State Estimator
Kalman Filter
4>(9),r(0),
H(6),
K(0)
x(t)
State
-Variable
Feedback
y(t)
Control Law
Synthesis
L(0)
Figure
#5:
General
self-tuning
observer controller.polesare placed
based
onthe
modelparameters obtainedfrom
the
identification
scheme.The basic
GSTOC
algorithmis:
Identify
the
model parametersandformulate
a state space model ofthe
plant
{$(0),
T(0),
H(0)}.
[image:16.553.135.474.77.433.2]Design
a controllaw,
obtaining
L(0).
The GSTOC is
avery
general algorithm asit
does
notspecify
which methodsto
use
to
identify
the
plant model or choosethe
closedloop
estimatororcontrol gains.If
the
GSTOC
is
writtencorrectly
a subroutine callto
the
different
partsof
the algorithm,
different
estimationtechniques
such asRecursive Least
Squares,
Recursive Maximum Likelihood
orStochastic
Approximation
Method
could
be
substitutedto
getthe
best
identification
methodfor
the
job.
Same
reasoning
goesfor
the
estimator or control portions ofthe
algorithm.The
three
portions ofthe
GSTOC
algorithmshownin
Fig.
#5,
parameterestimation,
state estimation and state variablefeedback,
aredeveloped in
the
3.
GSTOC
DESIGN
3.1
Parameter
Identification
Identification
is
the
experimentaldetermination
ofthe
dynamic
behavior
ofprocesses and
their
signals.[3]
For
adaptive control systems on-linein
realtime
identification is
ofprimary
interest
and animportant
part ofthe
STR.
The
on-line methods give estimatesrecursively
as measurements are obtainedand
is
the only
alternativeif
the
identification
is going
to
be
usedin
anadaptive controller or
if
the
processis
time-varying.[4] There
aremany
methods
for
analyzing
data
from
the
experiments.Some
such methods areRecursive
Least
Squares
(RLS),
Extended Recursive Least
Squares
(ERLS),
Recursive
Maximum Likelihood
(RML)
andStochastic
Approximation
Method
(STA).
The
recursive parameteridentification
technique
usedin the
GSTOC
developed in
this
paper willbe
Recursive Least
Squares. Given
the
linear
model
Z(k)
=H(k)0(k)
+
V(k)
(3.1.1)
z(k)
z(k-l)
z(k-N-l)
and
z(k)
=hT(k)0
+
v(k).The
estimation modelfor
Z(k)
is
Z(k)
=H(k)0(k)
(3.1.2)
where
0 is
the
best
estimate of0. The
principleofleast
squares statesthat the
unknownparameters of
0
shouldbe
selectedin
such away that the
loss
function,
J(0(k))
=Z(k)TZ(k)
(3.1.3)
is
minimal.By
writing
(3.1.3)
asJ(0(k))
=[Z(k)
-Z(k)]'[Z(k)
-Z(k)]
(3.1.4)
[Z(k)
-H(k)9(k)]T[Z(k)
-H(k)0(k)]
(3.1.5)
=
ZT(k)Z(k)
-2ZT(k)H(k)0(k)
+
0T(k)HT(k)H(k)0(k)
(3.1.6)
and
by
recalling that
d/dm(bTm)
=b
andd/dm(mTAm)
=2Am
where m andb
dJ(9(k))/de(k)=
+
2HT(k)H(k)9(k)
(3.1.7)
by
setting
dJ(9(k))/d9(k)
=0,
the
estimate of9 is
givenby
9(k)=
[HT(k)H(k)l1HT(k)Z(k)
(3.1.8)
which
is
the
batch formula for
least
squares estimation.To
develop
the
recursiveleast
squaresequations,
in
(3.1.1)
&
(3.1.8)
it
wasassumed
that
Z(k)
containedN
elements withN
>dim 9
= n.If
anothersample
became
available att(k +
1),
it
wouldbe
very costly to
compute9
using
(3.1.8). The
number offlops
to
compute9
is
onthe
orderofn3.The
recursiveapproach
is
to
compute9 for
n =ni
andthen
usethat
estimateof9
to
obtain9
for
n =n2
wheren2
> ni.One
additional measurement z(k+
1)
att(k
+
1)
is
z(k
+
l)
=hT(k
+
l)9(k)
+
v(k+
l)
(3.1.9)
Combining
the
additional measurementwith(3.1.1)
andfrom
(3.1.8)
9(k
+
l)
=[H^k+DHCk + lttWk
+
lJZtk+l)
(3.1.10)
0(k
+
1)
=[HT(k
+ l)H(k + DlHWk + l)z(k
+
1)
+
HT(k
+
l)Z(k
+
1)]
(3.1.11)
then
and
Z(k+1)
=z(k
+
l)
Z(k)
H(k
+
1)
=hT(k
+
l)
H(k)
V(k
+
1)
=v(k
+
l)
* v-1*- -*/
V(k)
9(k)
=P(k)HT(k)Z(k)
(3.1.12)
HT(k)Z(k)
=P-!(k)9(k)
(3.1.13)
P-1(k
+
l)=P1(k)
+
h(k-r-l)hT(k
+
l)
(3.1.14)
9(k+l)
=P(k
+
l)[h(k
+
l)z(k
+
l)+P1(k)9(k)]
(3.1.15)
:
P(k
+
l){h(k
+
l)z(k
+
1)
+
[Px(k
+
l)-h(k
+
l)hT(k
+
l)]9(k)}
(3.1.16)
=
9(k)
+
P(k
+
l)h[z(k
+
l)-hT(k+l)9(k)]
=
9(k)
+
K(k
+
l)[z(k
+
l)-hT(k
+
l)9(k)]
(3.1.18)
where
K(k
+
1)
=P(k
+
l)h(k
+
l)
(3.1.19)
Equations
(3.1.14),(3.1.18)
and(3.1.19)
are calledthe
information
form
ofthe
recursive
least
squares estimator.9(0)
andP_1(0)
canbe
initialized
to
0
andI/a
(0<a<
<1)
respectively.By
expressing
(3.1.18)
as9(k
+
1)
=[I-K(k
+
l)hT(k
+
l)]9(k)
+
K(k
+ l)z(k
+
1)
(3.
1
.20)
it
canbe
seenthat
the
recursiveleast
squaresestimatoris
atime-varying
digital filter
that
is
excitedby
randominputs. There is
acomputationcostin
inverting
the
n xnmatrixP
of(3.1.14).
By
applying the
matrixinversion
lemma
whichis
B1 = A1
+
CTJ^C
(where
all matrixinversions
are assumedto
exist,
A
andB
are nxn,
C
is
mxnand
D is
m xm)then
to
(3.1.14)
resultsin
P(k
+
1)
=P(k)-P(k)h(k+l)[hT(k-r-l)P(k)h(k
+
l)+I]1hT(k
+
l)P(k)
(3.1.21)
and
consequently,
by
substituting
(3.1.12)
into
(3.1.19)
for P(k
+
1)
andsimplifying
K(k
+
1)
=P(k)h(k+l)[hT(k+
l)P(k)h(k
+
l)
+I]"1(3.1.22)
and
simplifying
(3.1.21)
P(k
+
l)
=P(k)
K(k
+
l)hT(k
+
l)P(k)
(3.1.23)
P(k+1)
=[I-K(k
+
l)hT(k
+
l)]P(k)
(3.1.24)
Equations (3.
1.18),
(3.
1.22)
and(3.1.24)
arethe
covarianceform
ofthe
recursiveleast
squares estimator.9(0)
andP(0)
canbe initialized
to
the
same values asin
the informational
form.
It
canbe
seenthat
if
z(k)is
scaler, then
the
covariance
form
ofRLS
requires no matrixinversion,
andonly
onedivision.
In
the
development
ofthe
RLS
formulas
allthe
measurements were weightedby
the
same amount.In
the
caseoftime-varying
parameters,
aforgetting
orthan
pastones.By
introducing
aweighting
matrixW
whichis
diagonal
into
(3.1.3)
J(9(k))
=Z(k)TWZ(k)
(3.1.25)
Then
(3.1.8),
(3.1.14)
and(3.1.19)
couldbe
written as9(k)
=[HT(k)WH(k)]1HT(k)WZ(k)
(3.1.26)
P1(k
+
l)
=P1(k)
+
h(k
+
l)w(k
+
l)hT(k
+
l)
(3.1.27)
K(k
+
1)
=P(k
+
l)h(k
+
l)w(k
+
l)
(3.1.28)
and
(3.1.22)
asK(k
+
1)
=P(k)h(k
+
l)[hT(k
+
l)P(k)h(k
+
l)
+w(k +
l)f1(3.1.29)
the
weighted recursiveleast
squareestimator(covariance
form)
equationsare9(k
+
l)
=9(k)
+
K(k
+
l)[z(k
+
l)-h(k
+
l)9(k)]
(3.1.30)
K(k
+
1)
=P(k)hT(k + l)[h(k
+
l)P(k)hT(k
+
l)
+
w(k-r-l)]-1(3.1.31)
P(k)
=[I
-K(k)h(k)]P(k-l)/w(k
+
3.2
Discrete
Kalman
Filter
(Optimum
Observer)
A
dynamic
system whose statevariablesarethe
estimates ofthe
state variableofanothersystem
is
called anobserver ofthe
latter
system.The
stateestimator
that
is
optimum with respectto the
process noise and observationnoise
is
called aKalman
filter.
The Kalman
filter
wasfirst introduced
by
R. E.
Kalman
in 1960
for discrete
systems.In
the
development
ofthe
GSTOC
arecursive
discrete Kalman filter
withtime varying
gainswillbe implemented.
The
plant will nowinclude
processandmeasurementnoise.x(k
+
l)
=<Sx(k)
-r-Tu(k)
+
w(k)
(3.2.1)
z(k) =
Hx(k)
+
v(k)
(3.2.2)
where
w(k)
andv(k) arethe
process andmeasurementnoise and are assumedto
be
uncorrelatedandhave
gaussiandistributions.
Where
E{w(i)wT(j)}
=Q(i)8
(3.2.3)
E{v(i)vT(j)}
=R(i)8..
(3.2.4)
E{w(i)vT(j)}
=S
=0
(for
alli
andj)
(3.2.5)
and
the
covariance matrixQ(i)
is
positive semidefinite andR(i)
is
positivedefinite
sothat the
inverse
R_1(i)
exists.Disturbance
w(k)may
be
disturbance forces
acting
onthe
system,
errorsin
modeling,
system errorsdue
to
actuators or errorsin
the
translation
ofthe
known
input
u(k)into
physicalsignals.The
disturbance
v(k)is
often usedto
model errors
in
the
measurements madeby
the sensing
instruments,
unavoidable
disturbances
that
actdirectly
onthe
sensors and errorsin
the
state
x(0)
is
unknownbut
the
meanE{x(0)}
=mx(0)
and covariancePx(0)
areknown
andx(0)
is
uncorrelated withw(i)and v(i).To derive
the
recursiveequations
for
the
discrete Kalman
filter,
the
propagation ofthe
means andcovariancesof
the
system(3.2.1)
andthe
effects ofthe
measurements(3.2.2)
need
to
be investigated.
Taking
the
expected value of(3.2.1)
E{x(k
+
1)}
=E{Ox(k)
+
Tu(k)
+
^Fw(k)}
(3.2.6)
and
using
the
linearity
ofthe
expectation operator resultsin
E{x(k+
1)}
=E{$x(k)}
+
E{Tu(k)}
+
E
pFw(k)}
(3.2.7)
and
E{x(k
+
1)}
=$E{x(k)}
+
TE{u(k)}
+WE
{w(k)}
(3.2.8)
because
of<I>,
W,
T
aredeterministic.
Also
because
u(k)is
aknown input
andE{w(k)}
=0
from
being
gaussian,
equation(3.2.8)
canbe
reducedto
E{x(k
+
l)}
=<DE{x(k)}+ru(k)
(3.2.9)
The
state covariancePx(k),
whichis defined
asE{(x(k)
-mx(k))(x(k)
-mx(k))T}
propagates as:
Px(k
+
1)
=E{[x(k
+
l)-mx(k
+ l)][x(k+l)-mx(k
+
l)]T}
(3.2.10)
= <DPx(k)0T
+
^Q(k)T+
OE{[x(k)
-mx(k)]wT(k)WT}
+
WE{w(k)[x(k)
- mx(k)]T}<DT(3.2.12)
Because
mx(k)
is
notrandom andw(k)is
zeromean,
E{mx(k)wT(k)}
=mx(k)
andE{wT(k)}
=0 along
withE{w(k)mxT(k)}
=0.
Since
the
state vectorx(k)
depends
at
the most,
on randominput
w(k-l)
then
E{x(k)wT(k)}
=E{x(k)}E{wT(k)}
=0
and
E{w(k)xT(k)}
=0 then
(3.2.12)
reducesdown
to
Px(k
+
1)
= $Px(k)$T+
iJ/Q(OTT(3.2.13)
The first
term
of(3.2.13)
is
due
to the uncertainty
in
the
plant andthe
secondterm
is
due
to
the
process noise w(n).To determine
the
means and covariance ofthe
outputtake
the
expected valueof(3.2.2)
mz(k) =
E{z(k)}
=HE{x(k)}
=Hmx(k)
(3.2.14)
with
Ev(k)
=0
from
being
gaussian.The
cross covariancebetween
the
state andthe
outputis
Pxz(k)
=E{[x(k)
- mx(k)][z(k)-mztk)]7}
(3.2.15)
=
E{[x(k)
- mx(k)][H(x(k)-mx(k)
+
v(k)]T}
(3.2.16)
=Px(k)HT
(3.2.17)
Pz(k)
=E{[z(k)
-mz(k)][z(k)
-mz(k)]T}
(3.2.18)
=
E{[H(x(k)
-mx(k)
+
v(k)][H(x(k)
-mx(k) +
v(k)]1)
(3.2.19)
= HPx(k)HT
+
R
(3.2.20)
Defining
the
a priori estimationerrorcovariance attime
k
asx(k|k-l) = x(k)
-x(k|k-l)
(3.2.21)
and
the
associated a priori error covariance asP(k|k-1).
The
estimateattime
k
including
the
output measurementz(k),
be denoted
by
x(k|k).The
aposterioriestimationerror
is
then
x(k|k) = x(k)
-x(k|k)
(3.2.22)
and
the
associated aposteriori error covariance asP(k|k).
The
Kalman
filter has
two
steps ateachtime
k. The
time
update whichis
x(k-l|k-l)
updatedto
x(k|k-l)andthe
measurementupdatein
whichthe
measurementz(k)updatesx(k).
The
time
updatesof(3.2.9) & (3.2.13)
arex(k|k-l) =
<Dx(k-l|k-l) +
Tu(k-l)
(3.2.23)
P(k|k-1)
= <DP(k-l|k-l)^T+
*FQ(k-OTT(3.2.24)
The
measurementupdateofthe
Kalman filter
willinvolve
computing the
x(k|k)
=Fz(k)
+
g
(3.2.25)
The
matrixF
andthe
vectorg
needto
be determined
for
the
optimallinear
estimate of
x(k)
givenz(k).By
minimizing
the
mean-squarederror ofJ
=E{x(k|k)xT(k|k)}
(3.2.26)
=
E{tr[(x(k)
-x(k|k))T(x(k)
-x(k|k))]}
(3.2.27)
=
E{tr[(x(k)
-x(k|k))(x(k)
-x(k|k))T]}
(3.2.28)
=
E{tr[(x(k)
-Fz(k)
-g)(x(k)
-Fz(k)
-g)T]}
(3.2.29)
=
E{tr[(x(k)-x(k|k-l)-(Fz(k)
+g-x(k|k-D)
(x(k)
-x(k|k-l)
-(Fz(k)
+
g
-x(k|k-l))T]}
(3.2.30)
by
substituting
mz(k) =Hx(k|k-1)
andPzx(k)
=E{(z(k)
-mz(k))(z(k)
-mz(k))T}
into
(3.2.30)
J
=tr[P(k|k-l)
+
F(Pz(k)
+
mz(k)mzT(k))FT+
(g
-x(k|k-l))(g-x(k|k-l))T
+
2Fmz(k)(g-x(k|k-l))T-2FPzx(k)]
(3.2.31)
by
using
d/dF tr(FXTT)
=2FX
andd/dF
tr(DFX)
=DTXT(for any
matrixF,D
and
X).
J
=2F(Pz(k)
+
mz(k)mzT(k))-2Pzx(k)+
2(g-x(k|k-l)mzT(k))
+
(g-x(k|k-l))(g-x(k|k-l))T
Thus
to
minimizeJ it
is
requiredthat
5J/8g
=2(g
-x(k|k-l)) +
2Fmz(k)
=0
(3.2.33)
and
8J/8F
=2F(Pz(k)
+ mz(k)mzT(k))
-2Pxz(k)
+
2(g
-x(k|k-l)mzT(k))
=0
(3.2.34)
solving
for
g
from
(3.2.33)
g
=x(k|k-l)-FmzT(k)
(3.2.35)
substituting
g
from
(3.2.35)
into
(3.3.34)
resultsin
FPz(k)
Pxz(k)
=0
(3.2.36)
and
solving
for F
F
=Pxz(k)Pz-1(k)
(3.2.37)
substituting
(3.2.35)
&
(3.2.37)
into
(3.2.25)
givesthe
optimallinear
mean-squared estimate
for
x(k)x(k)
=x(k|k-l) +
Pxz(k)Pz-1(k)(z(k)
-mz(k))
(3.2.38)
replacing
Pxz(k),
Pz_1(k)
andmz(k)
withpreviously
computed valuesfrom
(3.2.17),
(3.2.20)
and(3.2.14)
andthe
appropriate substitutionsfor
P(k|k-1)
andx(k|k-l)
into
(3.2.38)
resultin
x(k|k) = x(k|k-l)
+
P(k|k-l)HT(HP(k|k-l)HT+
R)1(z(k)
Equation
(3.2.39)
is
the
optimallinear
estimate a posteriori estimate ofx(k)given
the
a priori estimatex(k|k-l)
andthe
new measurement z(k).In
computing the
a posteriori error covarianceP(k|k)
it is known
that the
linear
mean-squared estimate
is
unbiasedE{x(k)}
=mx(k)orE{x(k|k)}
=0
andusing
(3.2.38)
E{x(k|k)}
=E{x(k)
-x(k|k)}
(3.2.40)
-
E{(x(k)
-x(k|k-l))
-Pxz(k)Pz"1(k)(z(k)
-mz(k))}
(3.2.41)
=
E{x(k)
-x(k|k-l)}
(3.2.42)
=
E{x(k|k-1)}
(3.2.43)
Therefore,
x(k|k)provides anunbiasedestimateofx(k)aslong
asx(k|k-l)is
unbiasedand
from
(3.2.1)
and(3.2.9)
E{x(k|k-1)}
=E{x(k)
-x(k|k-l)}
(3.2.44)
=
E{x(k)
-Ox(k|k)
-Tu(k-l)
(3.2.45)
=
$E{x(k-l)
-x(k|k)}
(3.2.46)
=
0>E{x(k|k)}
(3.2.47)
shows
that
x(k|k-l)providesanunbiased estimateif
x(k-l|k-l)does. If
the
x(0) =
mx(0)
(3.2.48)
which
is
known,
then the
initial
estimateis
unbiased.Using
(3.2.38)
to
find
P(k|k)
P(k|k)
=E{x(k|k)xT(k|k)}
=E{(x(k)
-x(k|k))(x(k)
xfklk))1}
(3.2.49)
=
E{[(x(k)
-x(k|k-l))-
Pxz(k)Pz1(k)(z(k)
-mz(k))]
[(x(k)
-x(k|k-l))
-Pxz(k)Pz1(k)(z(k)
-mz(k))]T}
(3.2.50)
=
P(k|k-1)
-Pxz(k)Pz1(k)Pzx(k)
-Pxz(k)Pz'1(k)Pzx(k)
+
Pxz(k)Pz1(k)Pz(k)Pz"1(k)Pzx(k)
(3.2.51)
or
P(k|k)=
P(k|k-1)
-PxzCWPz-HkJP^k)
(3.2.52)
Using
(3.2.17)
& (3.2.20) into
(3.2.52)
withthe
appropriatesubstitutionby
P(k|k-1)
P(k|k)
=P(k|k-1)
+
R^HPtelk-l)
(3.2.53)
Equation
(3.2.53) is
known
asthe
matrixRiccati
equationfor
P(k|k)
orby
using the
matrixinversion
lemma
P(k|k)= [P(k|k-l)-1
+
(HTR-1H)-1l-1(3.2.54)
K(k)
= P(k|k-l)HT[HP(k|k-l)HT+
RJ-^PCklkJlTR-1(3.2.55)
then
(3.2.39)
couldbe
written asx(k|k)
=x(k|k-l) +
P(k|k)HTR"1[z(k)
-Hx(k|k-1)]
(3.2.56)
x(k|k) =
x(k|k-l) +
K(k)[z(k)
-Hx(k|k-1)]
(3.2.57)
K(k)
is
the
Kalman
gain matrix andit
showthe
influence
ofthe
newmeasurement
z(k)
in
modifying the
aprioriestimate x(k|k-l).The
quantity
[z(k)
Hx(k|k-1)]
is
calledthe
residual andis
an apriorioutputestimationerror,
sinceHx(k|k-1)
providesanestimate ofthe
output.Substituting
K(k)
into
(3.2.53)
givesP(k|k)=
[I-K(k)H]P(k|k-l)
(3.2.58)
The
recursive equationsfor
the Kalman filter
are:x(k|k-l) =
<x(k-l|k-l)
+
Tu(k-l)
(3.2.23)
x(k|k) = x(k|k-l)
+
K(k)[z(k)
-Hx(k|k-1)]
(3.2.57)
K(k)
= P(k|k-l)HT[HP(k|k-l)HT+
R]"1(3.2.55)
P(k-l|k-l)
=[I
3.3
Control Law
In
control systemdesign
it is
desirable
to specify the
closed-loop
dynamic
performanceof
the
system under control oroptimally
controlthe
statevariables and or
the
control variable.The design
ofthe
controller resultsin
the
assignment ofthe
poles ofthe closed-loop transfer
function,
the
methodis
known
as pole-placement.Pole-placement
using
state variablefeedback
is
whereall
the
internal
states are availablefor feedback
eitherin their
measured
quantity
ortheir
estimated quantities.Pole-placement
design
canspeed
up the
response of a sluggish system.The
procedurein
finding
the
gainmatrix
L
oftheGSTOC
willuseAckerman's
formula. Ackerman's
formula
is
based
on atransformation
from
ageneral system matrix$
to that
of a controlcanonical
form. Given
the
discrete
single-input single-output state spacemodel
x(k
+
l)
=<J>x(k)
+
Tu(k)
(3.3.1)
and
choosing the
controlinput
u(k)to
be
alinear
combination ofthe
statesu(k) = -Lx(k)
(3.3.2)
where
L
=[h 12 13
-..InJ
(3-3.3)
x(k
+
l)
=(4>-rL)x(k)
(3.3.4)
Given
the
characteristicequationP(z)
= zn+
Pn-iz""1+
pn-2Zn"2+
....+P1Z+ pn
(3.3.5)
If
the
system of(3.3.1)
is in
the
control canonicalform
shownin
(3.3.6)
x(k
+
l)
=0
10
0
0
1
0
0
-an -ai -Q2 -an-i
x(k)
+
0
0
u(k)
(3.3.6)
with
the
characteristic equationa(z) = |zl-
A|
= zn -l-an.iz11-1+
an.2zn-2+
+
aiz+a0
(3.3.7)
TL
=0
0
h
h
l3
....In
0
0
0
....0
0
0
0
....0
h
I2
13
....In
(3.3.8)
Then
the
closedloop
system matrixis
0
0
1
0
0
1
0
0
-(an
+
li)
-(ai+l2) -(02+ 13)
....-(an-i
+
ln)
(3.3.9)
and
the
characteristic equation of|zl-d>
+
TL|
aszn +
(Qn-i
+
ljz11-1+
(an-2
+
ln-l>n-2+
...+
(ai
+
l2)z+
(an
+
U)
(3.3.10)
then
by
equating
coefficientsin
(3.3.5)
&
(3.3.10)
resultsin
the
gainsli+1
=In
generalthe
system underinterest is
notin
control canonicalform. Given
that the
systemis
reachable,
atransformation
matrixT
needsto
found
to
convert
the
systemto the
form
of(3.3.6).
By
defining
anarbitrary
transformation
ofthe
state vectorx(k)
to
w(k)by
Tx(k)
=w(k)
(3.3.12)
the
new set of state equations arex(k
+
1)
=<>x(k)
+
Tu(k)
(3.3.13)
w(k+
1)
=T$x(k)
+
Tu(k)
(3.3.14)
w(k
+
l)
=TtfPMk)
+
TTu(k)
(3.3.15)
For
the
correct choiceofT,
T<J>T_1canbe
putinto
control canonicalform. Define
Tr^T"1
as
4>c
andTT
asTc.
By defining
a matrix calledthe controllability
matrixwc
=cr
$r
...$n2r
4>nlr]
(3.3.16)
and
wcc
=[rc
<j>crc
...(>cn-2rc
<$>cnlrc](3.3.17)
Wcc
=[TT
(Tr^T-^TT
...(TtfT^Tr
(T$T1)n-1Tr]
(3.3.18)
T
= WCCWC1(3.3.20)
P($)
=$?+
pi^11"1+
p2$n-2+
+pnI
(3.3.21)
where<J)
is
the
system matrixofthe transformed
system(3.3.6). Then
by
using
the
Caley-Hamilton
theorem
P($)
= in+
(pi-ai)^-1+
(p2-a2)rin-2+
+(Pn-an)I
(3.3.22)
The
last
row of<kis
zero exceptin
position n-k whichis
then
t
=[0
0
0
0
1]P($)
(3.3.23)
but
^=(T$T-X)
then
L
=Z.T
=[
00
0
0
UPOtyT-^T
(3.3.24)
=
[0
0
0
0
1]TP($)
(3.3.25)
butT
=WccWc-1and[0
0
0
0
1]WCC
=[
0
0
0
0
1],
then
L
=LWCC
Wc"1 =[
0
0
0
0
UW^P^)
(3.3.26)
which
is
Ackerman's formula.
Given
the
desired
matrixpolynomialac(A)
=An
+
an-iAnl+
...
4-anl.
Then
l
=to o o
...i] [
r
<j>r...<r2r^ri-1
The
next questionthat
needsto
be
answeredis
where shouldthe
closed-loop
poles
be
placed.Some
guidelinethat
governthe
choice ofthe closed-loop
polesare:[5]
Select
abandwidth high
enoughto
achievethe
desired
speed of response.In
practical
systems, there
arelimits
onthe
controlinput. If
the
controlsignalgenerated
by
the
linear feedback law
u(k) = -Lx(k)is
larger
than
possibleor
permissible, there may
be
potentialdamaging
effectsto the
plantordrive
the
plantinto
a non-linear region and(3.3.1)
will notaccurately
model
the
plant.Keep
the
bandwidth low
enoughto
avoidexciting
unmodeledhigh-frequency
effects andundesired responseto
noise.Place
the
poles atapproximately
uniformdistances
from
the
originfor
efficient useof
the
controleffort.The broad
guidelines above allowplenty
oflatitude for
the
specialneedsofindividual
applications.As
aresultfrom
optimizationtheory,
closedloop
polesin the
"Butterworth"
configuration
is
often suitable placement.The
"Butterworth"
configuration
places
the
polesradially
at anuniformdistance from
the
originin left half
plane.
The
roots ofthe Butterworth
polynomialsare givenby:
(s/o0)2m = (-Dm+1
(3-3-28
)
The
farther
away
from
the
openloop
poles,
the
closedloop
poles areplaced,
the
gains
to
effect a changein
the
system poles.Bandwidth
is
determined
primarily
by
its
dominant
poles,
i.e.,
the
poles with real parts closestto the
4.
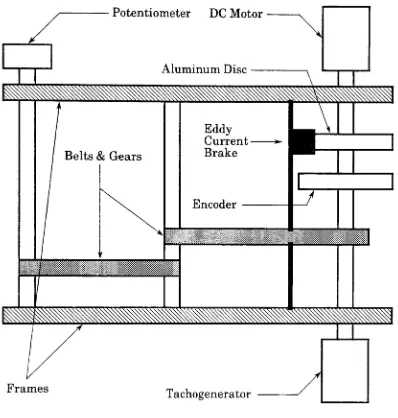
PLANT DESCRIPTION
4.1
Plant
A LJE DC
motormodule,
a generaldiagram
shownin Fig.
#6,
willbe
used asthe
plantin
orderto
develop
the
GSTOC. The DC
motoris
aPhillips
modelMB-12. The
motoris
capable ofbeing
driven
at speeds ofup to
2,500
rpmin
either
direction.
An
analog
voltagein
the
range of+/-5
voltsdetermines
the
speed and
direction
of rotation.A
secondDC
motordriven
directly by
the
first
provides an
analog
feedback
voltagein
the
range of +/-5
voltsproportionalto
the
speed anddirection
of rotation.An
eddy
currentbrake,
which uses apermanent magnet
to
create a magneticfield
in
which analuminumdisc
rotates,
is
usedto
introduce torque
disturbances
onthe
motor.The
brake has
three
settings:1.
OFF,
2.
Mid
position, 3.
Fully
On. The
motor module alsohas
a continuous rotation
potentiometer,
whichis driven
by
an output shaftgeareddown
by
a ratio of9:1
from
the
motor.The
potentiometergives ananalog
feedback
voltagein
the
rangeof +/-2.5
voltsproportionalto the
position ofthe
Potentiometer
DC Motor
Belts & Gears
Eddy
Current
-Brake
Encoder
misn
J
HUHMliMiaWi yuSiittmSStMiii^k
Frames
[image:43.553.79.477.86.504.2]Tachogenerator
4.2
MATHEMATICAL
MODEL
The
mathematicalmodel of athe
LJE DC
servo motor usedin
this
applicationwill
be developed
in
this
section.The
generalelectrical characteristics of aDC
motor
is:
L
di(t)/dt
+
R
i(t)
=V
-emf
(4.2.1)
where
L
is
the
inductance
ofthe
motor armature(henries)
R
is
the
resistance ofthe
motor armature(ohms)
V
is
the
applied voltage(volts)
i(t)
is
the
currentthrough the
armature(amps)
di(t)/dt
is
the
instantaneous
current(amps/sec)
emf
is
the
back
emf=Ke
d9(t)/dt
where
Ke
is
a constant(Volts/rad/sec)
d9(t)/dt is
rotationalvelocity
(rad/sec)
The
general mechanicalcharacteristics of aDC
motoris:
Jm
d29(t)/dt2+
Bd9(t)/dt
+
K9(t)
=TL
- JLd29(t)/dt2(4.2.2)
where
Jm
is
the
motorinertia
(Kg
m2)9(t)
is
rotational position(rad)
d9(t)/dt is
rotationalvelocity
(rad/sec)
d29(t)/dt2
K
is
a stiffness constant(N
m/rad)B
is
adamping
constant(N
m/rad/sec)
JL
is
the
load inertia
(Kg-m2)
TL
is
the
load
torque
=Kp
i(t)
where
KT
is
the torque
constant(N-m/A)
i(t)
is
the
currentthrough the
armatureCombining
andsimplifying
4.2.1
&
4.2.2
andassuming that the
electricaltime
constant
is
much shorterthan the
mechanicaltime
constantyieldsd29(t)/dt2 =
Kj/JR
*V
-(B/J
+
KT
Ke/JR)
*d9(t)/dt
(4.2.3)
Letting
x(t) = d29(t)/dt2x(t) =
d9(t)/dt
the
scaler modelofthe
DC
motorcanbe
defined
asx(t) =
KT/JR
*u(t) -(B/J
+
Kp
Ke/JR)
* x(t)(4.2.4)
Substituting
the
LJE DC
motorparameter valuesR
=2
ohmsKt
=0.007 N-m/A
Ke
=0.008 V/rad/sec
B
=30.3 E
10'6N-m/rad/sec
Jm
=17.5
E
10"6Kg-m2the resulting
equation ofthe
unloadedDC
motoris:
x(t) =
3.4
u(t)
-3.331
x(t)
(4.2.5)
Using
the
Matlab function
c2d and asampling time
oflOmSec
the
discrete
scaler model of
the
DC
motoris:
x(k
+
1)
=0.96723867
x(k)
+
0.03344
u(k)(4.2.6)
wherex(k)
is
rotationalvelocity
state andu(k)is
the
control voltage.Equation
(4.2.6)
is
ofthe
form (3.3.1).
The loaded
scaler model ofthe
DC
motor wasfound
experimentally
andthe
resulting
equationis:
x(t) =
5.59
u(t) -5.4795
x(t)
(4.2.7)
and
the
discrete
equationis:
5.
DSP
IMPLEMENTATION
5.1
Parameter Identification
In
the
parameteridentification
part ofthe
GSTOC,
which usesthe
RLS
informational
form
with aforgetting
factor,
the
unknown parameters of9 in
(3.1.1)
that
wereestimated,
are$
andT
of(3.3.1). The
values ofH
of(3.1.1)
areknown functions based
onthe
pair of observationsz(k)
andu(k)
obtainedin
the
experiment.
The
recursive equations(3.1.30),
(3.1.31)
and(3.1.32)
were usedin
the
GSTOC
algorithm.Bierman's
U-D
covariancefactorization
method[7]
wasused
in
the
RLS
estimationfor
the
matrixP(k)
in (3.1.32).
The
factorization
offers computationalsavings,
numericalstability
and reductionsin
computer storage requirements.The
factorization
statesthat
matrixP(k)
can
be
factored
asP
=U D
UTwith
U
as an unit uppertriangular
matrixandD
is
adiagonal
matrix.Computing
withtriangular
matricesinvolves
fewer
arithmeticoperations,
which
is
preferredin
a realtime
applications.A
three
variableforgetting
factor
was also usedin the
algorithm.The
three
values were:
none,
if
the
estimation errorwasless
than
acertainvalue,
no update wasdone,
a value of0.999
for
slowly changing
parametersand a valueof
0.95 for
fast
changing
parameters.The
initial
valuesfor 9 in
(3.3.1)
werethe
loaded
experimentally
obtainedvalues of$
andV
of(4.2.8).
5.2
Kalman Filter
The
Kalman
filter
willbe
implemented
withstraightline
coding
ofthe
computations.
The
valuefor
R in
(3.2.55)
wasdetermined from data
obtainedfrom
the
experiments.The
valuefor
Q
in
(3.2.24)
was chosento
givethe
best
results.
The initial
valuesfor
P(k-l|k-l)
in
(3.2.58),
P(k|k-1)
in
(3.2.4)
andK(k)
in
(3.2.55)
wereobtainedusing
the
DLQE
Matlab function
onthe
parametersfrom
(4.2.8)
andthe
chosenvaluesofR
andQ.
5.3
Control Law
The
computing
ofthe
gain matrix wasimplemented
with straightline
coding
of
Ackerman's formula (3.3.27).
The initial
value ofthe
polefor
the
desired
characteristicequation was chosen as not
to
produce alarge
valued gainmatrix.
5.4
Scaling
When
using
fixed-point
arithmeticit
is
usually necessary to
performscaling
onthe
controllerto
be
implemented.[6]
Two
objectivesofscaling
areto
fit
the
data
whichis
computedduring
the
course of stateequationcalculationsinto
the
limited
number range ofthe
DSP,
sothat
overflows are avoided withoutprovoking
excessive signal quantation effects andthe
otheris
to
alterthe
coefficients
in
such away that
they
fit
into
the
coefficientnumberrange.Input /
outputscaling transforms the internal
fractional
representations ofanumber
to
the
external physicalvariables.The
input
to the
motor(output
ofthe
D/A)
is
+/-5
volts.A
-I-1 to
-1in
the DSP
would represent a+
5
voltto
-5volts
input
to the
motor.The
scaling
ofthe
numbers usedthe
GSTOC
algorithm
had
to
be
watchcarefully
so as notto
overflowthe
computed5.5
Division
Since
the
TMS320C25 doesn't have
adivide
instruction,
away
ofdoing
aninverse
operationhad
to
be implemented.
One
way to
accomplishthis
is
to
useapproximation
techniques
using
the
solution ofnon-linearequations.This
methodrequires
that
a solutionfor
the
equationg(x)
=0
(5.5.1)
be
found. One
meansfor
find
a solutionfor
(5.5.1)
is
by
Newton-Raphson
iteration.
Consider
the
Taylor
series expansionfor
g(x):g(x
+
h)
=g(x) +
hg\x)
+
r(x,h)(5.5.2)
wherer(x,h)
is
the
remainder andcanbe
consideredsmall andg'(x)is
the
first
derivative
of g(x).Leaving
offthe
remainderandin terms
ofincremental
valuesofx
the
approximation:g(x[i
+
l])
= g(x[i])+
{x[i
+
l]
x[i]}g'(x[i])(5.5.3)
Solving
for
x[i+
1]
and withg(x)
=0
yieldsthe
approximationx[i
+
1]
= x[i]-g(x[i])/g'(x[i])
(5.5.4)
thus
x[i+
1]
willconvergeto
asolution ofg(x) =0.
To
find
aninverse
ofanumberc(1/c)
onecanwrite:g(x[i]) =
l/x[i]
-c =
0,
(5.5.5)
substituting
in
(5.5.4)
andsimplifying
gives:x[i
+
l]
=x[i]{2-cx[i]}
(5.5.6)
The
initial
guessfor
x[0]
canalsobe
approximated.The
inverse
ofcas:1/c
= l/m*2-e(5.5.7)
A
good seedfor
the
iteration
ofthe
inverse
of c wouldbe
2e.
One
musttake
precautionsusing this
methodin
that
for
certainvaluesofc,
6.
HARDWARE DESCRIPTION
A
TMS320
Analog
Interface Board
(AIB)
provided aninterface
from
the
TMS320C25
to the
plant.The AIB
is
ananalog-to-digital,
digital-to-analog
conversion
board
used as apreliminary
target
system withthe
SWDS
orin
astandalone configuration.
The
AIB
has
the
following
setoffeatures:
A
16
-bit
Analog
to
Digital
Convertor
with a-10Vto
+
10V analog
input
range with a maximum conversion
time
of17uSec.
A 16
-bit Digital
to
Analog
convertor witha-10Vto
+
10V
analog
outputrange with a
3uSec
settling time.
Sampling
rateclock withaprogrammablerange of5MHz to 76Hz
withausable range of
58.8KHz to 76Hz
(limited
by
the
conversionrangeofthe
A/D).
On-board
memory 4K
x16
to 64K
x16 for
standaloneoperation. [image:51.553.95.478.454.551.2]Anti-aliasing
andsmoothing
filters.
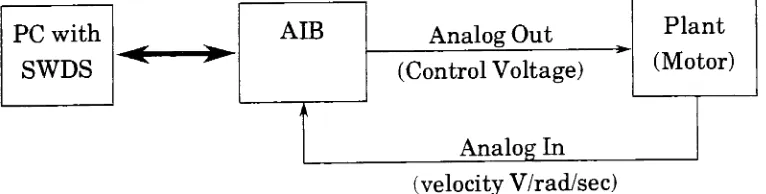
Fig. #7
showsablock diagram
ofthe
system configuration usedin the
GSTOC,
PC
withSWDS
AIB
Analog
Out
Plant
(Control
Voltage)
Analog
In
(Motor)
,*
(velocity
V/rad/sec)
7.
DSP CODE
The
development
andtesting
ofthe
GSTOC
algorithm wasdone
onthe
Texas
Instruments Software Development System (SWDS). The SWDS
is
aPC-resident software
development/debugging
tool
withthe
following
features:
Full
speed40
MHz TMS320C25 DSP
48
Kbytes (24 K
16-bit
words) of no wait stateRAM
RAM
configurablebetween
program anddata
spacememory
8
breakpoints
oninstruction
acquisitionWindow-oriented
debugger
screenData
logging
allowing
I/O
operationsto
disk
files
The
completeGSTOC
codeis
listed in Appendix A. The
codefor
the
GSTOC
algorithm
is
organized asfollows:
INITIALIZE
load
constantsfrom
programmemory to
data
memory
clearvariables
initialize
AIB
board
wait
for
interrupt
ISRO
get
input
z(k)compute
ERR
= z(k) - ye(k|k-l)Parameter Estimation
computepredictionerr
PERR
=HT(k)
*THETA(k)
update
diagonal,
off-diagonalelementsofP
andthe
gain valuesU(i,i),U(ij)
andBB*PERR
State Estimation
update
the
covariancematrixcalculate
the
Kalman
gainvaluesupdate
the
state estimateupdate
the
errorcovariancematrixPole-placement
Gain
calculate
the
gain matrixGSTOC
calculate
x(k|k)
calculate
the
control signalv(k)
saturate
the
control signalu(k)
update
the
estimatex(k|k-l)return
to
waitfor interrupt
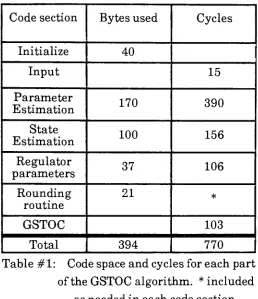
By
using the timer
onthe
TMS320C25,
the
number of cyclesfor
eachpart ofthe
GSTOC
algorithm wasdetermined,
andthe
results are shownin
Table #1.
From Table
#1 the
total
executiontime
for
the
interrupt
service routineis
77uSec,
therefore the
maximumsampling
frequency
is 12.9 KHz. This
Code
sectionBytes
usedCycles
Initialize
40
Input
15
Parameter
Estimation
170
390
State
Estimation
100
156
Regulator
parameters
37
106
Rounding
routine
21
*GSTOC
103
[image:54.553.148.406.74.373.2]Total
394
770
Table #1:
Code
space and cyclesfor
eachpartof
the
GSTOC
algorithm. *included
8.
RESULTS
The data for
the
following
graphswere obtainedby
sampling
the
outputusing
the
analog to
digital
converteronthe
AIB. The
value at eachsampling
instant
was stored
into
data
memory
ofthe
SWDS. Then
using the
SWDS,
the
data
was
dumped
to
afloppy
disk. The data
wasthen
convertedfrom
the
hex
format
to
a usableform
that
couldbe
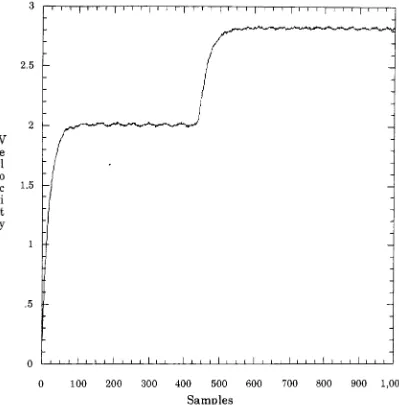
graphed.The
velocity
data
graphs show aresponse
to
astep
referencevelocity
input
andthen
after400
samples,
astep
torque
disturbance
was appliedto the
system.The
following
graphsillustrate
the
effects of closedloop
adaptive control.Fig.
#8
showsthe open-loop
responseto
adecrease in
the
load
torque.
In
the
open-loop
configurationany
changesin
the
load
torque,
causesuncompensatedchanges
in
the
motor speed.In Fig. #8
the
decrease in
torque
atthe
load
increased
the
speedofthe
motorfrom
anominal118
rad/secto
168
rad/sec,
whichwas
to
be
expected.The
speed ofthe
motorincreased
by
42%.
Also,
any
parameter variationssuch as
tolerances
between
motors andwear overtime
willcausechanges
in
the
speedofthe
motor.Fig. #9
showsthe
effectto
adecrease in load
torque
for
aunity
feedback
loop
controller.The
unity
feedback
will reducethe
sensitivity,
ofthe
motor,
to
changesin
the
load
torque.
In Fig.
#9,
the increase
in
motorspeedto the
changein
load
torque
from
the
nominalto 144
rad/sec,
a22% increase. Fig. #10 is
the
adaptivecontroller witha
10
mSecsampling
rate andthe
closedloop
poleis
set at0.7.
The
closedloop
poleat0.7
was chosenas notto
generatehigh
gain valuesin
the
poleplacementfeedback
controller.As
shownin
Fig.
#10,
there
is
very
little
overshootdue
to the
closeapproximation ofthe
closedloop
poleto the
error
in the velocity
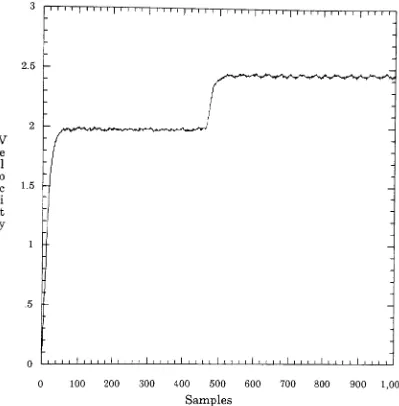
and slowconvergence.Fig.
#11 is
with
the
closedloop
pole set at
0.5. In
this
figure
there
is
ajust
noticeableincrease in
the
overshootfrom Fig.
#10,
due
to
moving
the
closedloop
polefarther
away
from
the
openloop
systempole,
which causesthe
feedback
gainsto
increase
thus
driving
the
plant
harder. The increase
gain wasthought to
decrease
the
errorin the
output velocity.
In Figs. #10 &
#11,
the
10
mSecsampling
rate cause errorsin
the
parameter estimation algorithmproducing
slow convergence andlarge
steady
state errorsin
the
output velocity.Fig.
#12
is
the
adaptivecontrollerwith a
1
mSecsampling
rate andthe
closedloop
pole set at0.7. In Fig.
#12 the
overshoot
due
to the
faster
sampling
rateis
due
to the
positionofthe
openloop
pole
being
closerto the
unit circlecausing
a37.5%
overshoot.This high
overshoot shouldn't
be
a problem.This figure
shows nosteady
state errorin
the
output velocity.The
adaptationis
completein approximately
115
samples,
which at
1
mSecis 115
mSec.Fig. #13
is the
responseto the
decrease
in torque
with
the
closedloop
poleset at0.9.
The
overshootis just
noticeably
lower,
but
still
high
at35%.
Fig.
#13
showsthe
samezerosteady
state errorin
the
n I I I I I T
"1
i i i|
i ' i]
i i i prn i|
i i ip
i i i | i i ip
r_1 I I 11 I I I I I L_Lj i i
I
i i iLj
i iL
J I I LJ I L I 1 I I 10
100200
300
400
500
600
700
800
900
1,000
Samples
[image:57.553.75.474.121.526.2]2.5
V
e
1
o
c
i
t
y
1.5
' ' ' '
' ' ' ' '
I
' ''I
' ' 'I
' ' ' i|
i i i >|
i i i i|
i i i i|
i i i i|
i i i i.5
i i i i i i ' ' i I i i i ' I i i i i I i i i i I i i i i I i i i i I i i i i l i i i i I
0 100
200
300400
500
600
700
800
900
1,000
Samples
[image:58.553.75.474.118.524.2]2.5
-2
-V
e
1
o
c
i
t
y
1.5
.5
-1 '
| ' '
|
i i i|
i i i|
i i i|
t i i [n i
|
i i ip
r_i_j i l_i i_ I i i i I i i i I ' i i I i ' i
I
i i iI
i i iI
i_ i i i i i0
100200
300
400500
600
700800
900
1,000 [image:59.553.74.474.105.521.2]Samples
Figure #10:
Closed
Loop
Response
with10
mSecsampling
andclosedloop
0
I
i i iI
i i iI
i i iLj
i iI
i i iI
i i iL_i
i i I ' i i I i i i 1 i0
100
200
300
400
500
600
700
800
900
1,000
Samples
Figure
#11: