Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
1994
Practical application of random vibration signal
analysis on structural dynamics
Yu-Chin L. Allen
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
Recommended Citation
PRACTICAL APPLICATION OF RANDOM
VIBRATION SIGNAL ANALYSIS IN
STRUCTURAL DYNAMICS
Yu-Chin L. Allen
A Thesis Submitted in Partial Fulfillment
of the Requirements for 'the Degree of
Master of Science
in Mechanical Engineering
Approved
by:
Professor
J. S.
Torok (Thesis Advisor)
Professor N. Berzak
Advisor D. S. Aldridge (AC Rochester)
Professor
C.
W. Haines (Dept. Head)
Department of Mechanical Engineering
College of Engineering
Rochester Institute of Technology
Rochester, New York
PERMISSION GRANTED:
I, Yu-Chin Allen hereby grant permission to the Wallace Memorial Library of the
Rochester Institute of Technology to reproduce my thesis entitled Practical
Application of Random Vibration Signal Analysis in Structural Dynamics in
whole or in part. Any reproduction will not be for commercial use or profit.
May 17, 1994
Acknowledgements
I
wouldlike
to
thank
my
family,
my
husband
Stu
for
allhis
patienceandunderstanding
overthe
past six years as we endeavoredto
juggle
our work,school,
andfamily.
Our
children,
Russell
andSusan,
for
behaving
soI
could work andencouraging
meto
finish
so we can play.I
would alsolike
to thank
Dr. Torok for
allhis
support,
countlessAbstract
The
use of random signal analysisin
vibration and structural analysisis
discussed
anddocumented.
The
needto
minimize product performance anddurability
risksdue
to
competitive pressurein the
marketplacehas forced
industry
to
streamline methods of productdesign,
processing,
and evaluation.Engineers
needto
be
experiencedin
much more advancedtechniques than
they
did
even adecade
ago.Random
vibration signals are usedto
simulate realworld environments and are another
tool
in
structural analysis.This
investigation
outlinesthe
basics
of randomvibrations,
frequency
analyzers,
data
analysis,
along
with associated noise and errors problems.A
casestudy
using
an aluminumbeam
is
usedto demonstrate the
concepts presentedin
this
Table
ofContents
Paae
List
ofSymbols
viiList
ofTables
ix
List
ofFigures
X1.
Introduction
1
2.
Background
4
2.1
Fourier
Analysis
5
2.2
Modern
Frequency
Analyzers
9
2.3
Noise
andError
9
3.0
Random Vibration
10
3.1
Basic
Probability
andStatistics
in Random
Vibration
10
3.2
Correlation
16
3.3
Random Environment
Definitions
17
4.0 Data Analysis
22
4.1
Frequency
Analyzers
22
4.2
Measurement Functions
23
4.2.1
Time Domain Analysis
23
4.2.2
Amplitude Domain Analysis
23
4.2.3
Frequency
Domain
Analysis
24
5.0 Noise
andError
27
5.2
Fourier
Transform Algorithm
Error
28
5.3
Error
Classification
32
5.4
Noise
33
5.5
Frequency
Response Errors
40
5.5.1
Random Errors
in
Frequency
Response
40
5.5.2
Bias Errors
in
Frequency
Response
41
6.0
Theoretical
Analysis
43
6.1
Exact
Solution
ofFree
Vibration
43
6.2
Approximation Method
56
7.0
Experimental Analysis
66
7.1
Equipment
66
7.2
Damping
Analysis
67
7.3
Spectral Analysis
andCorrelation
70
7.4
Mode
Shapes
77
8.0
Conclusion
80
8.1
Theoretical Analysis Application
80
8.2
Conclusions
andRecommendations
88
List
of
Symbols
F(t)
Fourier Transform
Frequency
COT
Time Period
p(x)
Probability Density
Function
Standard
Deviation
E
[ ]
Expected Value
RxxCO
:Autocorrelation Function
Rxy(T):
Cross
Correlation Function
Gxx(T):
Autospectral
orPower
Spectral
Density
(one sided)
Gxy(T):
Cross
spectralDensity
(one sided)
Sxx(T):
Autospectral
orPower
Spectral
Density
(two sided)
Sxx(T):
Cross
spectralDensity
(two sided)
H(f)
Frequency
Response Function
2
Yxv(f)
J
Coherence
Function
Be
Filter
Bandwidth
u(t)
True
Input Signal
n(t)
:Output Noise
M
Moment
V
Shear Force
P
Mass
Density
A
Area
H
Mass
perUnit
Length
KE
Kinetic
Energy
U
Potential
Energy
D
Dissipation Function
Qi
Generalized Force
[M]
:Mass
Matrix
[C]
:Damping
Matrix
[K]
:Stiffness
Matrix
1>i
Normal
Mode
qi
Generalized Coordinate
nd
Number
ofAverages
?
i
List
ofTables
Table
Page
Table
1
:Typical Values
ofS(f)
andG(f)
21
Table
2:
Determination
ofLog
Decrement
67
Table
3:
Determination
ofDamping,
C
68
Table
4:
Comparison
ofNatural Frequencies
80
Table 5:
Frequency
Response Estimates for Mode
2
84
Table
6:
Frequency
Response Estimates
for Mode 3
84
Table
7:
Frequency
Response Estimates for Mode
4
84
Table
8:
Frequency
Response Estimates for Mode 5
85
Table
9:
Frequency
Response Estimates for Mode 6
85
Table
10:
Frequency
Response
Gains
from Experimentation
85
Table
1 1
.Frequency
Response
ofFirst
Mode
Approximation
withSix
Functions
atTen
times the
Damping
Constant
88
Table
12:
Frequency
Response
ofFirst
Mode
Approximation
withSix
List
of
Figures
Figure
Page
1
Periodic
Signal for Fourier Transform
Example
6
2
Fourier Transform Example
8
3
Random Signal
1 1
4
Probability Density
Curve
1
2
5
Random Signals
Time Aligned
16
6
Typical Random Vibration Spectrum
20
7
Analyzer Block Diagram
22
8
Waterfall
Analysis Example
26
9
Sine
Wave for Fourier Transform Example
28
10
Sine Wave
Used in
Discrete
Fourier Transform
30
1 1
Ideal
Single
Input/Single Output System
33
12
System
withNoise
atInput
andOutput
35
13
System
Model
withNoise
atOutput
Only
38
14
Beam
Model for
Continuous
System
42
1
5
Mode
Shape
1
withExact Solution
52
1 6
Mode
Shape
2
withExact Solution
52
1 7
Mode Shape 3
withExact
Solution
53
1
8
Mode
Shape
4
withExact
Solution
53
1
9
Mode
Shape
5
withExact Solution
54
20
Mode Shape
6
withExact Solution
54
1.0
Introduction
Fierce
competitionin
the
worldwide marketplacehas forced
industries to
revolutionize
their
processes.From
concept selectionto
design,
prototypefabrication
to
massproduction,
every
phaseof a producthas
been
scrutinized and waste ofany
form
(material,
process,
overhead)
eliminated.No longer
does
industry
have
the
luxury
oflong
lead
times,
oligopolies,
and productrecalls.
Consumers
arebetter
educated,
have
morechoices,
and will notaccept a second rate product.
Industry
relies on engineersto
be
ableto
producefunctional,
durable,
esthetically pleasing
products which performbetter
than the
competitionin
orderto
stay in business.
To stay
ahead ofcompetition,
the
engineer must make use ofmany
tools
available
to
streamlinethe job.
The
invention
ofthe
integrated
circuit(IC)
has
giventoday's
engineerimportant
tools.
Made
availableto
the
masses are reliable and affordableanalyzers,
data
loggers,
sensors,
and computers as a result ofthe
IC
revolution.No
longer
does computing
power residein the
halls
of universities and government researchlabs.
Powerful
computing
is
available evento
the
smallest contractengineering firms
andengineering
students.Now
we are ableto
redesign andimprove
product withouthundreds
ofcostly
hardware iterations.
One
role engineers mustplay in
today's
marketplaceis
that
ofthe
appropriately
in the
field
to
guarantee success.Products
must withstandtheir
everyday
use withoutcracking,
buckling,
orfailing
their
performance.There
aremany
tools
availableto the
analysttoday.
Theoretical
analysis andmodeling
are enhancedby
computers armed with sophisticated software packages which are ableto
solve systemsof complex equationsin
seconds.Traditional
transducers for
force,
acceleration, pressure,
temperature,
etc. arecomplimented with computers and various
analyzers,
which aidin
defining
the
product and
its
field
of operation.The
structuraldynamics
analystis
responsiblefor characterizing
a product'sdynamic behavior in every
appropriate environment.
This
makestoday's
productbetter
suitedfor fierce
competition.Random
vibration analysisis
usedby
the
structural analystin
many
ways.
Many
environments products are subjectedto
are consideredrandom,
such asthe
beating
of waves on oilrigs, to the
noiseemanating from
automobiles.
A
random environment simulationin
product evaluationis
instrumental in predicting
andassuring durability.
Random
vibrationis
alsoused
in
excitation of productsto
determine
dynamic
characteristics,
such asthe
natural
frequency,
mode shapes anddamping
factor.
A thorough
understanding
of random vibrationis invaluable
to the
analyst.The study
of random vibrationis
nottrivial.
This type
of environmentis
not
simply
described
withjust
one ortwo words,
but
through
the
definition
ofvarying
frequency
spectra.To describe the
environmentacceleration,
frequency,
and statisticsmust allbe
utilized.This
is
usually
done
withdynamic
characterization of
the environment,
and simulation are all possible withsophisticated computer systems which
involve
analog- to-digital
conversions(A/D),
signalprocessing,
andFast Fourier Transforms (FFT). The
terms
correlation and spectral analysis are used used
to
describe
the
randomness ofthe
data
andthe
environment.All
ofthis
is necessary
to
understandthe
random vibration environment.
As
withany
measurementstaken
with sophisticatedequipment, the
question arises asto the
validity
ofthe
data. The
popular adage "garbage in-garbageout"
has haunted every data
taking
engineer.Especially
with randomvibration where noise can
look just
as viable asthe
environmentitself,
care mustbe
taken
in the
winnowing
processto
separatethe
data
from
the
noise.Much
workhas
been
done
in
the
field
of random vibrationto
mentorthe
inexperienced.
The
goal ofthis thesis
is
threefold.
First,
random vibrationbasics
aredetailed,
andtheir
usein
structuraldynamics
analysisdemonstrated.
Second,
noise and error when related
to
random vibration and signalprocessing is
detailed.
Third,
the
concepts are alltied
together
anddemonstrated
in
anexample
involving
abeam.
An
aluminumbeam is
presented,
whichis
evaluatedusing
severaldifferent modeling
techniques.
The beam is
then
subjectedto
a rigorousdynamic
evaluation,
andthe
resultscomparedto the
various models.Recommendations
to
aidin further
work withboth
random vibration and signal2.0 Background
The
powerfulIntegrated
Circuit
(IC)
revolutionhas
changedthe
job
ofengineers.
No longer bogged
down to
solve complicatedthird
andforth
orderequations and
systems,
computer programs are availableto determine the
behavior
of componentsthrough
modeling
only theorized
twenty
years ago.Finite
element analysisis widely
usedby industry
to
model complex systemsand
improve designs
withoutwasting
valuabletime
physically
evaluating
hardware iterations.
This has
spawnedthe
branch
ofengineering
calledcomputer aided
engineering
(CAE).
The
area oftest
and measurementhas
also prospered with
the
IC
revolution withthe
introduction
of affordable signalprocessing
and analyzers.1
970
markedthe
year ofthe first commercially
available
FFT
analyzerby
Time Data Corporation.
General Radio Corporation
was
instrumental in
developing
the
algorithms usedtoday
to
create random vibrationin
the
laboratory.
Virtually
any
type
of vibration environment canbe
recreated
in the lab from
mixed mode vibrationto
triaxial
shaker excitation.Today
the
marketis
suppliedby
many
manufacturers of analysis andtest
equipment who compete
for the business
of structuraldynamics
analysts.The
IC has
replacedthe
once expensiveanalog
computer andfilter
equipmentavailable
to
the
engineer with affordablehigh
speeddigital
ones.Random
vibrationis extensively
usedin engineering
to
describe
environments.
With
randomvibration,
the
exact values cannotbe precisely
determined for
a giveninstant
oftime.
Instead,
astatistically
valid estimate ofrandom vibration
involves probability
as well asits
applicationto
measurements.
Many
events aredescribed
by
randomsignals,
such asjet
noise and earthquake
intensity,
sincethere
is
nodeterministic
modelthat
candescribe
the
unpredictable nature ofthe
events.Random
vibration can alsobe
used whenstudying
the
dynamics
of a system.Using
randomvibration,
allfrequencies
in
a predeterminedfrequency
bandwidth
canbe simultaneously
excited.This
can provide a quick method ofidentifying
naturalfrequencies
ofthe
systemby
examining
the
systeminput
and output.All
naturalfrequencies
are excited atonce,
which allowsthe
interactions between
them to
be
examined.To
the
structuraldynamics
analyst,
this
canbe
of vitalimportance
when resonanceshave destructive
interference
in
a random vibration environment.2.1
Fourier
Analysis
A
random signal appears as a complex waveformin the time domain.
It
is
not atrivial task to
characterize.Fourier
Analysis
is
usedto
interpret
randomdata
sincethe
frequency
domain
is
better
suitedto
describe
randomenvironments.
The
assumptionis
madethat
all motion canbe described
in
terms
of sines and cosines ofvarying frequencies
which areharmonically
related.This
wasdiscovered first
by
J. Fourier
(1768-1830).
Functions
aredescribed
by
the
period and associatedamplitude,
which are combinedto
create
the
Fourier
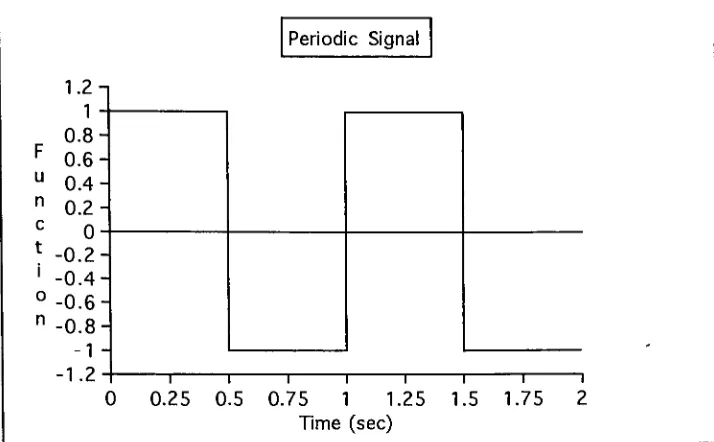
series.For
anexample,
considerthe
periodic waveformin
Figure 1.
The
Fourier
series usedto describe the
signal consists ofthe
Periodic Signal 0 n c * -0. 1 -0.
-0.
n-0
.2 1 |.4-0z-\
4 6- 8-1-1.2 1 1 1 1 1 1 1 1
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2 Time
(sec)
Figure
1.
Periodic Signal Example
for Fourier Transform
Example
F(
l)
:= a0
+X!
(a
COS("'
W 0'*)
+b
n sin(n"
< 0'l))
where:
2-jr.
co
q
:=T
=fundamental
frequency
[image:17.548.95.452.44.265.2]T
F(
t)-sinfn-co0-t)
dt
For the
example presentedin
Figure
1
:ao
=an
=0
n
"
T
~2
F
q-sin
in
(
n-co
q-t)
dt
bn
:- -F0-(i-cos(n-co0--T-n-co
0
b
n
'=
F
q-(l
cos
(n-
k)J
n-n
n 'r
0
n^
jt
^0
F(t)
:=4-31
g(l-sin(nco0T))
F(t)
=4-jisin
(
coq-tj
+ sin(3-coq-t)
+-sin(5-co
q-t]
+1 -I
0.9-F
0.8-u
0.7-n
0.6-c 0.5-*
0.4-1
0.3-0.1
-
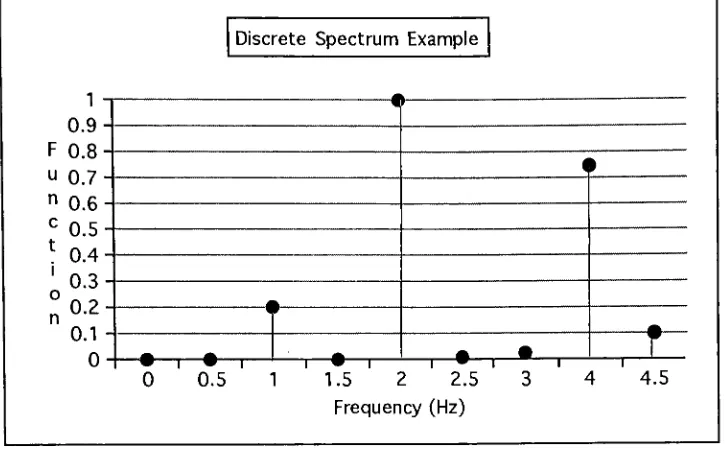
0-Discrete Spectrum Example
* t
%t
m
A
T
0 0.5 1 1.5 2 2.5
Frequency (Hz)
1 1
3 \ 4.5
Figure
2:
Fourier
Transform Example
The
operationitself is
quitelaborious
and prohibitive when performedby
hand
on a complexsignal,
but
has
been
assimilatedto the
modern computer agethrough the
use ofDiscrete Fourier Transforms
(DFT)
wherelarge
sets ofdata
canbe
manipulatedusing
this
algorithm on computers.The Discrete Fourier
Transform
is
an approximation ofthe
continuousFourier
transform:X(f)
:= 00-00
x(t)-e"j23tftdt
[image:19.548.101.464.24.249.2]x
1 -j2scf( ndt)
In
1965
J. W.
Cooley
andJ. W.
Tukey
introduced
a new methodfor
determining
coefficients,
involved
withFourier
transform
algorithm,
whichgreatly
reducedthe
number ofdata
points needed.This is
the
Fast Fourier Transform
(FFT)
which
forms
the
basics
for
much ofthe
computationsin
equipmenttoday
.For
more
information
onDFT
andFFT
see references2
and7.
2.2
Modern
Frequency
Analyzers
Today,
the
dynamic
signal analyzeris
abasic
tool
usedby
anyonestudying
structuraldynamics.
Analyzers
canbe
multichannel,
allowing for the
investigation
of multipleinputs
simultaneously.Not only
canthe
motion of asingle point
be
determined,
but
the
interactions between
points canbe found.
Time
andfrequency
domain
measurements are madein
a matter of seconds.Analyzers
areflexible;
parameters are manipulatedto
suitthe
data
underinvestigation.
If
peaks value arethe
maininterest
ofthe user, then
averaging
techniques
andwindowing
areeasily
manipulatedto
reflect peakhold
data
andflat
top
windowing.Data
is
storedin basic formats for
transfer
into
spreadsheetsfor
more complex mathematical manipulationthrough
standardization offile
formats
such asthe
Universal
File
Format
(UFF)
orStandard File
Format (SDF).
Manipulation
ofdata
is
not aroadblockfor
today's
engineer.Armed
withthe
appropriate
transducer,
signalconditioning,
andanalyzer,
engineers can make2.3
Noise
andError
Noise
and error plagueengineering
data.
Sophisticated
equipmentis
haunted
by
ubiquitous powerline
noise(usually
60-Hz).
The
most meticulous of measurements canbe
destroyed
by
anoisy
environmentor errors.The
recognition of errors and noise and methodsto
affectthem
arenecessary to
assure viable
data.
Simple
techniques
exist,
such asincreasing
statisticalaccuracy
by
increasing
the
number of measurements usedin
averages,
which mustbe
weighted againstthe
cost ofdoing
soin
the
competitive marketplace.It
is
difficult
to
obtain several samples of a onetime event,
such asthe
launching
of a satellite.Engineering
judgment
mustbe
relied onto
make a"good
enough"
3.0 Random Vibration
Random
vibrationis
a vital part ofthe
analysisofdynamic
systems.A few
applications of
the
concept of random vibration are: resonanceidentification,
modeling
of complexsystems,
description
of realistic environments.Definition
of
basic
terms
usedto
describe
random eventsis
neededbefore proceeding
further
into
correlation and spectral analysis.Random
signal analysisis
usedto
identify
situationsin
which precise valuescannot
be determined
to
identify
the
system,
sobest
estimationis
used.Probability
and statistics are neededto
describe
the
properties ofthe
environment .
The study
of random vibrationsdeals
withdetermining
the
statistical characteristics of a system andhow
the
outputdepends
onthe
dynamic
properties ofthe
system underinvestigation. Several terms
areneeded
to describe
a randomsignal,
such asaverage,
meansquare, variance,
and correlation.
To
understandthem,
abrief introduction to
afew
conceptsin
statistics will
be
presented.3.1
Basic
Probability
andStatistics in
Random
Vibration
A
fundamental term
in
statisticsrelating
to
random signal analysisis probability
density
function
(PDF),
whichis
giventhe
symbol p(x).is defined
asthe
length
oftime
an event occursbetween
two
givenlimits
divided
by
the total
length
ofthe
event under observation.defines
the
probability
an event wilp(xo)
= prob(
x0
<x<x0
+dx)
=dt/T
where:
dt=
the time
xo<x<xrj
-i-dxT
=the total
period ofinvestigation.
rx
Prob
(x
i<x<x2)
:= p( x)dx
To
help
understandthe
conceptsof randomvibration,
a random sample canbe
used
to
identify
basic
terms.
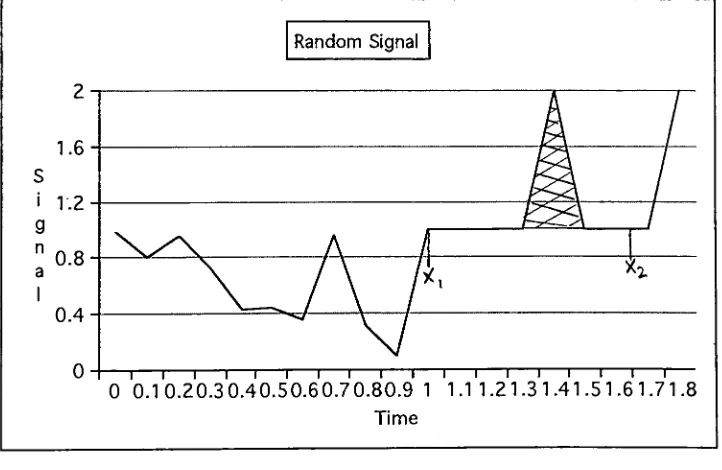
Figure
3
displays
atypical
random event recordedover a period of
time.
The probability
that
the
x value willbe
in
the
range ofxi
and
X2
during
the
time
periodT
identified is indicated
by
the
shaded area.1.6 s
i 1.2 g n
I 0.8
0.4
Random Signal
i i i i i i i i i i i i i i i i i i 0 0.10.20.30.40.50.60.70.80.9 1 1.11.21.31.41.51.61.71.8
Time
[image:23.548.101.462.379.614.2]For
the
exampleif the
periodis between
1
and1
.6for the time
period,
and
the
probability
that the
signalis
greaterthan
1
for
the
identified
time,
then:
T
= 1.6-1
=0.6dt
=0.2
(shaded area)
then
:p(x)
=.2
/
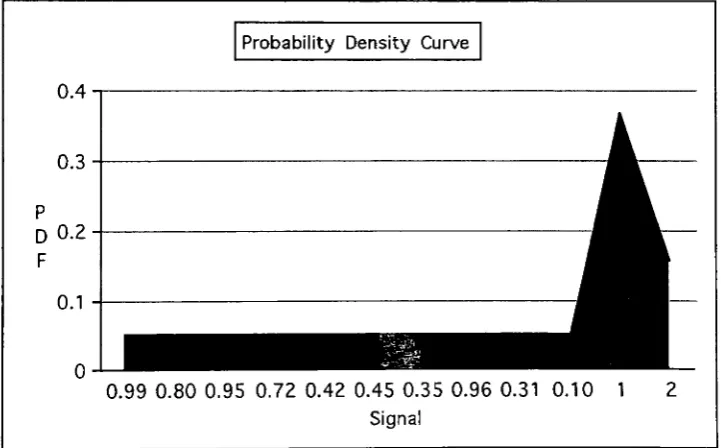
.6 = .33.A
Probability Density
Curve
is
a plot ofthe
event .See
Figure
4
for
an example.The
area underthe
probability
density
curve givesthe
probability.
Referring
to the
example setin
Figure
3,
the
probability
the
x valuebeing
between x-|
andX2
during
the time
periodT
is
shownby
the
shadedregion
in
Figure
4.
The
probability
density
curve portraysthe
probability
of xwithout
the
time dependence.
Probability Density
Curve0.4
0.99 0.80 0.95 0.72 0.42 0.45 0.35 0.96 0.310.10 1 2
Signal
[image:24.548.102.463.352.576.2]Measurements
ofprobability
density
andthe probability
density
curve canbe
made with aprobability
analyzer.The
event underinvestigation
is
sampled
quickly
over a period oftime,
then
displayed.
The
valuesfor the limits
are
then
entered andthe
probabilitiesdetermined.
Many
naturally
occurring
events,
when sampled over along
period oftime,
willdisplay
abell
shapedcurve which
has been been termed
the
Gaussian Distribution.
The
formula
for
the
Gaussian
Distribution is:
-,(x N2
m)
p(x):=-Lr.e
where:
m = mean value of x
a = standard
deviation
The
Gaussian
distribution is
also referredto
asthe
normaldistribution.
In
random vibration
theory,
the
characteristics ofmany
systems are approximatedby
this distribution.
Random
Environments
aredescribed
by
afew
key
formulas,
such as mean value and standarddeviation
which willbe defined
next.The
mean valueis
afundamental
characteristic ofthe
environment.When p(x)
canbe
determined for
a randomprocess, then
avariety
of characteristics canbe
defined for the
processdefined
as x(t).Allowing
the
expressionE
[ ]
to
signify
the
expected value ofthe term
in
the
brackets,
the
following
definitions
aredefined:
E[x]
=m=i:-x(t) dt
Relating
the
p(x)
to the
mean,
sincedt
Zt:=p(x)-
dx
Then
:E[x]
= 00-00
x-p( x)
dx
The
mean value givesthe
centraltendency
of afunction
or signal.Similarly,
the
mean square value of x=E
[
x2
]
: average value of x2
E
[
xA2]
= x(t)2dl00
x -p(x)
dx
Standard
Deviation
ofx,
a , andvariance,
a canthen
be defined:
The
varianceis
the
square ofthe
deviation
ofthe
xfrom
the
meanlevel
E
[
x]
.It
can alsobe
shownthat
the
varianceis
equalto the
mean squareminus
the
mean squares or:2
a=E[x2]-(E[x])2
Variance
provides anindication
ofthe
dispersion
ofthe
variable aboutthe
mean value.
Now
that the
basic terms
usedto
describe
random processeshave been
defined, they
canbe
usedto
describe
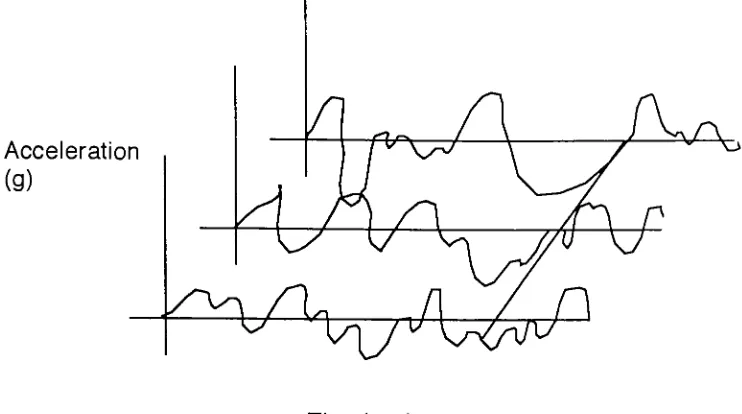
environments.A
samplefunction
is
asingle
time
history
usedto
describe
a random process.A
collection of samplefunctions is commonly
referredto
as an ensemble.The
mean value of asample
function
canbe
found
through
summing the
instantaneous
values ofeach sample
function
atthe
sametime point, then
dividing by
the
number offunctions(See Figure
5).
The
term
stationary
random process refersto
aprocess
in
whichthe
characteristics(mean
value andvariance)
ofthe
ensembledo
notdepend
on absolutetime.
Stationary
also means ensemble averageis
Acceleration
(g)
Time(sec)
Figure
4:
Random
Signals
Time Aligned
3.2
Correlation
Correlation is
usedto
determine how
afunction
relatesto
anotherfunction
at alater
pointin
time.
Two
types
of correlation areinstrumental
to the
study
of randomvibration,
autocorrelation and cross correlation.Autocorrelation
relates afunction
to
itself
at alater
fixed
instant
oftime.
The
formula for
Autocorrelation
is:
Rxx(T)
=E[x(t)x(t
+T)]
or
RxxW
=lim1
rT
T?oo
T
x(
t)-x(t +x)
dt
[image:28.548.92.463.43.250.2]1
.if
the
processx(t) is stationary,
then the
mean and standarddeviation
areindependent
oft
2.
it
is
an evenfunction
For Cross
correlation relatestwo
different functions
at afixed
later
time:
Rxy(T)
=E
[
x(t) y(t+T)]
andRyx(T)
=E
[
y(t) x(t+T)]
or
rT
RXy(x)
=lim
j_.
T-^-ooT
x(t)-y(t +
x)
dt
In
general,
cross correlationif
not even.It
the
time
separationT is very
large,
no correlation
is
expected.Correlation is commonly
usedto
detect periodicity
in
functions,
predict signalsin
noise,
and aidin
the
measurement oftime
delays.
3.3
Random
Environment
Definitions
With
the
definition
ofcorrelation,
otherterms
usedto
describe
randomvibration can
be
introduced.
A
nonstationary
random processis
onein
whichthe
mean and autocorrelationvary
withtime.
The terms weakly
stationary
orstationary
in the
wide sensedescribe
a special casein
random vibration wherethe
meanis
constant,
but
the
autocorrelationdepends
onthe time
separation(T)
only
and nottime
(t).
Strongly
stationary
orstationary
in the
strict senseimplies
that
the
correlationis
time invariant.
A
nonstationary
random processhas
characteristics whichdepend
ontime;
to
characterizeit,
aninstantaneous
where
the
mean and autocorrelation computedfor
asample arethe
samefor
the
entirefunction
of astationary
random process.Autospectral
orPower Spectral
Density
(PSD) (Gxx (0)
for
astationary
record represents
the
rate of change ofthe
mean square value with respectto
the
frequency. This
term
is
usedextensively in
describing
random vibrationprocesses,
asit
relatesthe
vibration amplitude withprobability,
hence it is
instrumental
to
random processes.The
values are estimatedby
computing
the
mean square value
in
a narrowfrequency
bandwidth
at centralfrequencies,
then
dividing
the
valueby
the
frequency
bandwidth.
The
total
of all meansquare values
divided
by
frequency
givesthe
total
area ofthe
function
andis
the
total
mean square value ofthe function.
Spectral
density
functions
arecommonly
usedfor: determination
ofsystem properties when random vibration
is
involved,
specification of random vibrationtest profiles,
andidentification
ofenergy
and noise sources.Fourier
analysisties
together
the time
andfrequency
domains
of asignal.
The
coefficients ofthe
Fourier
series canbe
plotted againstfrequency
producing
the Fourier
spectrum.Computers
areinstrumental in
performing
Fourier
transforms
utilizing
the
fast Fourier Transform
(FFT)
algorithm whichminimizes
the time to
compute values.X(f)
:= 00x(t)-e~i2ltftdt
with
the
inverse
transform:
x(t)
:=00
-00
X(f)-ei2jlftdt
where
the
integral
canbe
considered as a summation ofthe
continuousspectrum of sinusoids.
Spectral
Density
is defined
asthe
Fourier
transform
ofthe
correlationfunction.
There is
autospectraldensity
defined
as:S(f)
:=XX Rxx(x)e
l2*fTdx
with
the
inverse:
RxxG)
:=and cross spectral
density
defined
as:S
xx(f)-e
5tTdx
Sxy(f)
:= 00R
xy
(x)
e 1 % xdx
R
xy
(,):=
00
Sxy(f)-ei2:ifTdx
The
unitsfor
spectraldensity
arethe (mean
square value)/(unit
offrequency).
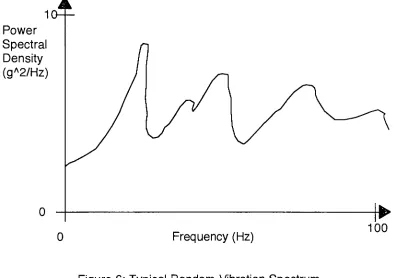
Used commonly in
vibrationis
acceleration spectraldensity
or power spectraldensity
described
as gA2/Hz.A
graph of atypical
random environment ofthis
type
is
shownin Figure
6.
The
mean square value of astationary
randomprocess
is
the
area underthis
graph whichis
alsoRxx(O).
Power
Spectral
Density
(gA2/Hz)
0
Frequency
(Hz)
Figure
6: Typical
Random Vibration
Spectrum
Two
commonterms
usedto describe
processes are narrowband
andbroad band.
As
the
namesimply,
a narrowband
processhas
spectraldensity
which occupies
only
a narrowband
offrequencies.
A
broad band
processconsists of a wide
frequency
band
of excitation.These
types
of processes can [image:32.548.82.476.217.495.2]range
is known
then
narrowband
excitation canbe
usedto
excite a smallrange.
If there
is
noindication
offrequency
rangeto
use, then
abroad band
is
typically
selectedto
provide anindication
offurther
excitation needs.If
the
frequency
range ofinterest is limited
to
positivefrequencies
only
(
from
0
to
positiveinfinity)
then
one sided spectraldensities
are ofinterest.
These
aredefined
asGxx(
f
)
andGyy(
f ):
Gxx(f)
=2Sxx(f)
andGyy(f)
=2Syy(f).
in
whichf
>0.
This is
feasible,
sinceS(f)
is
even.Typical
valuesofS(f)
andG(f)
are presented
in Table 1.
Table
1
:Typical
values ofS(f)
andG(f)
Frequency(Hz)
S(f)
(gA2/H;z) G(f)(gA0 0.002 0.004
5 0.0052 0.0104
10 0.036 0.072
15 0.009 0.018
20 0.6 1.2
25 0.003 0.006
30 0.0025 0.005
35 0.058 0.116
40 0.006 0.012
45 0.0063 0.0126
4.0
Data Analysis
Data
analysisfor the
structuraldynamics
analysttypically
involves the
frequency
responseof a structureinstrumented
withtransducers.
Basic
terms
and applications are presented
in this
section.Examples
aredisplayed in
Chapter
7
withthe
aluminumbeam
example.4.1
Frequency
Analyzer
Frequency
analyzers are usedthroughout
industry
as atool
in
understanding
systembehavior. Whether
the
systemis
avibrating
mass or aproduction
line
adynamic
signal analyzer will make a physical measurementthen
presentit in
aformat
the
user requires.A
frequency
analyzer consists of abank
of variablefrequency
narrowband filters
with an rms meterto
display
the
filter
output.The
first
analyzerswere
analog,
which couldbe very
cumbersome andlarge
depending
onthe
functions it had
to
perform.Many
analyzerstoday
accomplishthe
filtering
through
digital
signalprocessing
(dsp)
chips,
so analyzers canbe
portablehand held
units.See Figure
7
for
ablock diagram
of atypical
frequency
analyzer setup.
Input x(t)
Narrow Bandpass filterw/bandwidth=dfandcenter frequency=
to.
Square
and
Average
Divide
by
dfGxx(fQ)
Obtain
x(fo,
df,
t)
4.2
Measurements Functions
Analyzers
areflexible
instrumentation.
With
the
appropriatehardware
configuration,
structures aslarge
asbuildings
and as small as electronicboards have
their
dynamic
characteristicsidentified.
Three
commonmeasurement
domains
arethe
time,
amplitude,
andfrequency.
Other
measurements are available as special
features
of equipment manufacturers,such as
Bruel
andKjaer's Cepstrum
analysis.4.2.1
Time
Domain
Analysis
Time
domain
analysisusually
consists of atime
record andthe
autocorrelation and cross correlation
functions
associated withthe
signals.This
is
the type
oftrace
which canbe
found from
anordinary
oscilloscope.Time
domain
analysis canbe
used as a quick method ofmonitoring
signalintegrity.
When starting any
analysis,
a quick view ofthe transducer
priorto
measurementcan
indicate
problems withinstrumentation
setup.Time domain
analysis(sometime
a referredto
asrunning mode)
andoperating
modedeflection
aretwo
analysistypes
whichtakes
a structureoperating in its
normal condition anddisplays
the
dynamics
as afunction
oftime.
It
is distinguished from
modalanalysis,
in
that
it is
time
based
instead
offrequency
based.
It has
the
ability
to
show product
interactions
during
operation.Analyzers
start withdata from the
time
domain
to
form
frequency
and amplitudedomain
measurements.4.2.2
Amplitude Domain
Analysis
Amplitude
domain
analysis consist ofhistogram,
probability
density
details).
It
can provideanindication
ofdata
nature(
is it Gaussian
or not?)
orgive minimum and maximum
data
values overthe
data
record.This involves
general statistical analysis.
4.2.3
Frequency
Domain Analysis
Frequency
domain
analysesareimportant
to
the
structuraldynamics
analyst
in understanding
the
dynamic
characteristics ofthe
structure.Power
spectrum
(both
cross andauto),
linear
spectrum,
frequency
response,
coherence,
and spectral maps are alltypical
measurements.Power
spectra(for
details
see chapter3)
areone-sided,
versuslinear
spectra which aretwo
sided.Linear
spectra arethe
result ofdirect FFT
of atime
signal.Spectral
measurements are useful
in
identifying
frequencies
ofinterest
(
resonances,
operating
frequencies,
cutofffrequencies,
etc.).
Frequency
responseis
atwo
or more channel measurement.One
channel
is
typically
designated
the
input,
and all othersthe
outputs.The
frequency
responsefunction
of asystem,
H(f),
is
defined
as:H(f)
:=00
h
(x)
e JT
dx
where:
h
(
x)
=the
unitimpulse
function
describing
the
systemUsing
complex polar notationto
describe
frequency
response:H(f)
:= |H(f)|-e~j*(f)I
H(
f
)
|
=gainfactor
of a system<K
f
)= phasefactor
of a systemH(
f
)
is
the
Fourier
tranform
ofh(x ).
Many
engineers usethe terms
"frequency
response"and
"transfer
function"interchangeably. This
should notbe
practiced,
since atransfer
function
moreaccurately describes
the
Laplace
transform
ofthe
unitimpulse
responsefunction.
The
coherencefunction
is
also used quitecommonly in the study
ofsystem
dynamics. Coherence is
the
ratio ofthe
absolutevalue ofthe
cross-spectral
density
function
squared, to the
product ofthe two
comprising
autospectral
density
functions:
^
GXX(f)-Gyy(f)
Coherence is
a measure ofthe
accuracy
ofthe
linear input/output
modelassumed
for
the
system underinvestigation.
Coherence
is
usedsuccessfully
in
identifying
errors,
as willbe discussed in
chapter5.
Spectral
maps,
or waterfall analyses are athree
dimensional
displays
ofdata.
Typically
anotherparameter, such as revolutions per minute(rpm)
for
arotating
piece of machinery,is
usedto
alignthe typical
power spectrum whileconditions are varied.
This
type
of analysisis
usefulin
distinguishing
between
system natural
frequency
andforced
vibration.A
naturalfrequency
willbe
vibration will
vary
following
the third parameter(rpm).
See
Figure
8
for
aspectral
map
example.6320 RPM Spectrum from spectral map
I
13SpectralMap Chan 9 6.32kRPM
Mag
Peak!gA2fflz
JL
A AJUma
JL<&iffli
6.48k
0 Functn Lin Hz
g^larkerg
RCLDSpectralMap Chan 9
RPM
1.064k
Vibration Level
g'2/hz
Frequency [hz]
ilA.
[image:38.548.117.453.135.584.2]3.2k
Figure 8:
WaterfallAnalysis Example
5.0
Noise
and
Error
The
accuracy
of measurements madeconcerning
random vibrationsignals must
be
examinedto
understandthe
nature ofthe
environment.When
dealing
with randomdata
sampling, this type
ofinvestigation is
extremely
important,
due
to the
unpredictable nature ofthe
subject.The
common scenarioof
"garbage
in /
garbageout"
can
be
the
pitfall of aninexperienced
engineer.Error is
inherent
to
randommeasurements,
since measurements areonly
asample of
the
environment.The sampling
technique
also produces errorin the
data.
5.1
Accuracy
ofMeasurements
Errors
are afundamental
problemin any type
of experimentation.Repeatability
andreproducibility
is
a problem with randomdata.
How
muchvariation can
be
allowedto
characterizethe
process mustbe determined.
When analyzing
data,
only
a sample ofthe
infinite
ensembleis
used.With the
constraints of
the
analysishardware
(
memory, speed,
timing,
etc),
only
alimited
length
of a given sample canbe
analyzed.When measuring
spectraldensity,
abasic dilemma
mustbe
resolvedwith each measurement.
In
orderto
achievehigh
resolution,
the filter
bandwidth
ofthe
analyzer,Be,
mustbe
small.Filter
bandwidth
refersto the
frequency
span afilter
in
the
frequency
analyzeris
madeto
measure.If
afilter
is
setto
measurebetween
20 to 25
Hz,
the
Be
wouldbe 25-20
=5
Hz.
But
,to
frequency. To
compensatefor
this
dilemma,
averaging
time
mustbe
setto
alarge
value,
sothe
samplefunction
mustlast for
along
time.
With many
functions
this
is
possible,
but for
someevents,
such as rocketlaunches,
long
samples and repetition can
be impossible.
Frequency
analyzers are also susceptibleto
asteady
state orbias
errorwhen
the
filter bandwidth
covers a rangeoffrequencies
wherethe
spectraldensity
is changing rapidly
overthe
frequency
band.
Again the
solutionto this
is
to
use an analyzer with narrow enoughfrequency
band
andtake
data
over along
period oftime.
The
speed ofdigital techniques
have
madethem
very
popular
in the field
offrequency
analysis.Digital
speed comparedto
analog
filtering
becomes
a majorfactor
sinceit
allowsfor
longer time
recordsto
be
made
reducing
error.Taking
longer
samples with more averages can answersome error
problems,
but there
is
much moreto understanding
frequency
analysis
techniques.
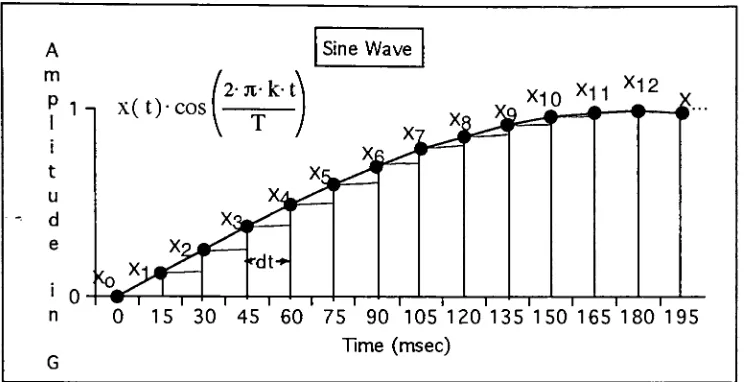
5.2
Fourier Transform
Algorithm Error
To
understandhow
afrequency
analyzer calculatesthe
Fourier
A
m
P 1
1
Sine Wave
x,o
11
XJ2
.If...
1i
t
XfJtJt
(- 1' ^
u
d
e
i 0^
<o3
XjKit-*
U "1 w i
n 0 15 30 45 60 75 90 105120135150165180195
G
Time
(msec)
Xr
=X(t
=r*dt)
Discrete Time Series
{ Xr
},
r=.... -1.0,
1.2,
...Figure
9.
Sine Wave
for Fourier
Transform
Example.
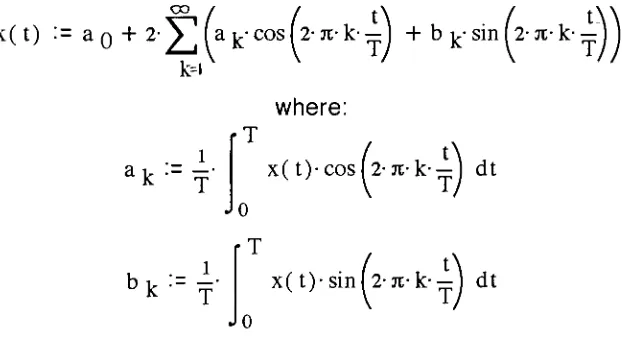
The
analyzer willdetermine
the
statistical characteristics ofthe
function
by
manipulating
discrete
values of Xf.Given
the
equationfor
discrete
Fourier
transforms:
x(t) :=
ag
+2-Vj
[a
jc-cos(2-jfk-j
+b
j,-sin
f
2-%k-]]
k=i
where:
ak-
x(
t)-cos[2-ji-k-]
dt
0
bk:=T
x(t)-sin(2-3i-k--J
dt
If
the
continuoustime
seriesis
unknown, andonly equally
spaced samples areknown;
wehave
asequence of samples(xr),
where r=0,1,2,...
(n-1)
where andt
=r*
[image:41.548.122.433.385.554.2]Replace
the
aboveintegral
with a summation:1
^
-i(2,.|).(r.dt)Xk'=
T
2-.Xr'C
dt
The
Xk
representsthe
wholearea underthe
curve(See Figure
10).
If T=N*dt is
substituted
then:
A
m
P i -,
i
t
u
d
e
n
G
Sine Wave
x(
t)-cosxio *"
x:2
0 15 30 45 60 75 90 105120135150165180195 Time
(msec)
Figure
10:
Sine
Wave
usedin DFT
H-l "i-2-jtk-r
Xk:=^
SXre
N
r=o
The
discrete Fourier
transform
(DFT)
ofthe
series{
xr},
r=0, 1, 2,
...,
(N-1)
is:
Hi)
M-/Xk:=^X>fe
k-o
withk=0,
1,2, 3,...,
(N-1).
[image:42.548.95.470.163.354.2]xr
:=X!XkeHi)
with r=
0, 1, 2,
3,... (N-1). With
using
the
DFT
method,
the
smallerthe
sampling
interval,
the
closerthe
approximation.Problems
arise whentrying
to
calculatevaluesfor x|<
greaterthan
(N-1).
If
k=N+L,
then:
.
i-Xn
+ L:=N"EXre
2jtl(N+
L)
NSimplifying,
Xn
+L:=irZXr
.P\
N/.
-i-2-KT
but,
i 1 Jt-r ._
no matter
the
value ofr,
so xn+[_= x |_.Thus
the
coefficientsof x kjust
repeatthemselves
for
k>(N-1)
causing
distortion,
whichis
called aliasing.The Nyquist
frequency
is
defined
as:At
=samplingtime
Sampling
Frequency^ =SamplingRate
At
This
is
the
maximumfrequency
that
canbe
detected
from
data
sampled attime
spacing
dt. The
physical result ofsampling
at afrequency
too low for
a systemis
that
higher frequencies
are missedin
measurements.The
DFT
method ofFourier transform
was replaced whenJ. W.
Cooley
and
J.
W.
Tukey
introduced
the Fast
Fourier
Transform
(FFT)
in
1965.
This
algorithm streamlined
the
computation ofthe Fourier Transform
by
changing
the
method used
to
interpolate
constantsin
the trigonometric
polynomial.This in
combination with
the
integrated
circuit revolutionhave
madefrequency
analyzers available
to industry.
The
FFT
equation computesthe
complexcoefficients
Ck
instead
ofak
andbk
withthe formula:
2m-1
F(x)
:=l-Vck-eikxk=o
where:
jiijk
c^:=yi-em
k
k
for
eachk
=0, 1,
2
2m
-1.Time
andfrequency
domains
areusually
relatedthrough
FFT
andIFFT
in
the
frequency
analyzerstoday
instead
ofDFT
andI
DFT.
An
outline ofthe
processfrequency
analyzers usefor
spectral estimatesis:
1
.A
discrete time
seriesis
createdby
the
results of
sampling the
for
r=0, 1, 2, 3,...,
(N-1)
at atime
interval
dt=T/N.
2.
The
Fourier
Transforms for
{Xr}
and{Yr}
are calculated.3.
Discrete
seriesfor
spectraldensities
aredetermined from
{Xr}
and{Yr>.
Appropriate
spectraarethen
derived.
4.
IFFT is
then
usedto
determine
the
corresponding
correlationfunctions.
5.3
Error
Classification
There
aretwo
classes of error whendealing
with randomvibration,
bias
error and random error.
Random
erroris
the
result ofthe
nature ofthe
data,
the
unpredictability
from
onesampling
to the
next.The
incident
of random erroris
high
whensampling is limited.
Bias
errors are consistent errorsin
data
whichare
due
to the
processing
ofthe
data
to the
appropriateformat for
the
user.This
can
be due to
calculationinefficiencies.
Combined
these
errors pollutemeasurements
being
made.This
is
one reasonwhy
they
mustbe
identified
andan
understanding
ofhow
to
workwiththem
mustbe
attainedby
the
user ofspectral analysis and correlation
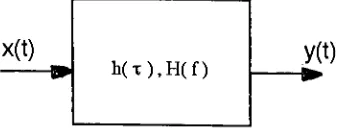
5.4
Noise
To
understand noisein
asystem,
use aideal
singleinput/
single outputx(t)
h(x),H(f)
y(t)
Figure
11:
Ideal Single Input/ Single Output
System
Under ideal
conditions:y(t)
:= 00h
(x)
x(t
-x)
dx
where
h(x)
is
the transfer
function for
the
linear
systemEvaluation
of a systemfrequency
responsefunction
canbe
performedfrom
measurement of
x(t)
andy(t) using
the
equation:H(f)=
Gxy(f)/Gxx(f)
H(f)
is
acomplex numberwhich canbe
representedby:
H(f)
=HR (f)
-i H
i(f)
[image:46.548.194.365.27.93.2]H(f)
:=|H(f)|-e
i*(f)|H(f)|
:=(HR(f)2
+H!(f)2)
(|)(f) := atan
:the gain
factor
Hi(0\
HR(f)j
':
the
phasefactor
If
the
assumptionis
that
the
input x(t) is
from
astationary
randomprocess,
anddata is
accumulated over sufficienttime
sothat the transients
die
out, the
input/
output auto spectrum relation
is:
Syy(f)
=I
H(f)
1
2
Sxx
(f)
:two
sidedGyy(f)
=I
H(f)
1 2
Gxx
(f)
:one sidedAnd the
input/output
cross spectrum relationis:
SXy(f)
=H(f) Sxx (f)
:two
sidedGyy(f)
=H(f)
Gxx (f)
:one sidedThese
aretrue
whenthere
is
no extraneousnoise, the
systemis
nottime
varying,
andthere
are no nonlinear characteristics.n(t)
u(t)
h(T),H(f)
V(t)
^
y(t)
m(Wlux(t)
where:
u(t)
andv(t)
arethe
true
signalsm(t)
andn(t)
are noiseterms.
Figure
12:
System
withNoise
atInput
andOutput.
Now the terms
x(t)
andy(t)
consist of:x(t)
=u(t)
+m(t)
andy(t)
=v(t) +n(t)
With
noise,
Gum(f)
=GVn(f)=Gmn(f)=0.
The
system spectral relationis:
Gw(f)= IH(f)|2
Guu(f)
[image:48.548.163.448.37.146.2]GUv<f)
=H(f)
Guu(f).
The
original system spectraldensity
functions
are now:Gxx(f)
=Guu(f)+Gmm(f)>Guu(f)
Gyy(f)
=Gvv(f)
+Gnn(f)>Gw(f)
Gxy(f)=Guv(f)
The
coherenceis
defined
by
the following:
2._
(|Guv(f)[):
Yuv(f) !=
Gmi(f)-Gvv(f)
uuvw ~vw-=s
true
coherencev m*._
QGxy(nD
XV
-("^|f|
is
measured coherence.In
anideal case,
coherenceis
unity.In
actualexperimentation,
coherencevaries
from
zeroto
onedue
to:
1
.Noise
in the
measurement.2.
Bias
errorsin the
spectral estimate.3.
Nonlinearity
in the
relationship between x(t)
and y(t).4.
The
outputy(t)
affectedby
inputs
otherthan
x(t)
Relating
the two:
IGxy(f)l2=
IGuv(f)l
2
= IH(f)|2 Guu2(f)=Gw(f)Guu(f)
IH(f)|2
=
Gw(f)/Guu(f)
2
.
Ouu(f)-Gyv(f)
Yxy(0 "=
(Guu(f)+Gmm(f))-(Gvv(f)+Gnn(f))
which
is less
than
or equalto 1
.If input
noise existsin
asystem, then
there
aretwo
cases:1
.The
noise will passthrough the
system and:-Hxy(f) will
be
abiased
estimate ofH(f)
in
gain and phase.-If
Gxm(f)
is
zero,
Hxy(f)
is
unbiased.2.
The input
noisedoes
not passthrough the
systemthen:
- gain will
be
abiased
estimate ofH(f),
but
phase will notbe
biased.
- phase will
however
depend
onthe
ratioGmm(f)/Guu(f)
known
asasignal
to
noise ratio.
-GXy(f)
will notbe
influenced,
andhence
will give atrue
estimateGuv(f)-If
the
systemhas
noisein
the
outputonly (See Figure
13):
n(t)
x(t)
h(T),H(f)
v(t)
"*- y(t)
Figure
13:
System Model
withOutput Noise
only.For the
model:input is virtually
noisefree
the
outputis
composed ofv(t)
whichis
due
to
x(t)
and otherdeviations
present.From
the
coherence ofthe
noisein the
system,
eliminating
input
noise,
the
relationships:
Gyy(f)
:=Gvv(f)
+Gnn(f)
Gvv(f)
:=Yxy(f) -Gyy(f)
Gnn(f)
:=(i-Yxy(f)2)-Gyy(f)
Thus
coherence whenthere
is
noise atthe
outputis
between
zero andone,
it
5.5
Frequency
Response
Errors
Estimation
for
frequency
responsein
singleinput/
single output systemsinvolves
both
random andbias
errors.It
is extremely
important
that
these
errorsare
understood,
andif
possibleminimized, for
data
analysisto
be
credible.Coherence functions
will aidin
the
detection
and classification oferrors,
soit
is
good practice
to
analyze coherence whenevermaking
frequency
responsemeasurements.
5.5.1
Random Errors
in
Frequency
Response
Random
errorin
frequency
responseis
due
to these
common sources:measurement noise
in
transducers,
computational noisein data
processing,
other unwanted
inputs,
andnonlinearity
between
the
input
andthe
output.Random
erroris
relatedto
the
coherence and number of averages usedin
spectral
density
calculation.To
minimize random errorthese
steps shouldbe
utilized:
1.
Minimize
noisein instrumentation
by
using
appropriate equipment(high quality
transducers
whenavailable,
watchgrounding
loops,
etc.)
2.
If the
coherencefalls
broadly
over afrequency
range andthe
frequency
responseis relatively
low,
extraneous noise atthe
outputshould
be
suspected.This
canbe
due
to
uncorrelatedinputs
as well.3.
If
the
coherencefalls
broadly
over afrequency
range, the
frequency
responseis
notrelatively low
, andthe input
power spectralBias
errors could alsobe
causedby
this
scenario.4.
If the
gainis sharply
peaked,
asin
the
case of asystem with slightdamping,
coherence will peak atcorresponding
frequencies.
This
is
due
to
high
signalto
noise ratios atthese frequencies.
If
the
coherence
does
not peak or even worsenotches, then
n