Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
10-1-1997
System identification and control of a 3D truss
structure using PLID and LQG
Phillip Vallone
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
ROCHESTER INSTITUTE OF TECHNOLOGY
Rochester, New York
October, 1997
SYSTEM IDENTIFICATION AND CONTROL OF A 3D TRUSS STRUCTURE
USING PLID AND LQG
A THESIS FOR M.S.
SUBMITTED TO
THE FACULTY OF THE DEPARTMENT OF ELECTRICAL ENGINEERING
IN CANDIDACY FOR THE DEGREE OF
MASTER OF SCIENCE
in
ELECTRICAL ENGINEERING
BY
PHILLIP VALLONE
Approved
By:
Prof.
Dr. Mark A. Hopkins
(Thesis Advisor)
Prof.
Dr. Mark H.
Kempski
Prof.
Dr. Athimoottil V. Mathew
Prof.
RIT Thesis Binding Procedure
Examples of Thesis Reproduction Permission Statement
(3 options--please choose one)
Permission granted
T~.tleofthesis
S,j.:>t'XM
J:AQvJ\',r'<"'~~'Qh
o,vv\
(0;1[0\
of
~
51)
lrv.s~
>-t-,..v,--\vr~
VSI1I\'tl
ELlc>
"""&
LOh
I, author's name,
hereby grant permission to the Wallace Library of the Rochester Institute of Technology
to reproduce my thesis in whole or in part. Any reproduction will not be for commercial use or profit.
Date: \
1.)
r.lg
/q
'--'--7
Signature of Author:
-OR
Permission From Author Required
Title of thesis
_
I, author's name,
prefer to be contacted each time a request for reproduction is made.
If
permission is granted,
any reproduction will not be for commercial use or profit. I can be reached at the following address:
Phone:
_
Date:
Signature of Author:
_
OR
Permission Denied
Title of thesis
_
I, author's name,
hereby deny permission to the Wallace Library of the Rochester Institute of Technology
to reproduce my thesis in whole or in part.
ACKNOWLEDGMENTS
I am sincerely grateful to Dr. Mark Hopkins for his patience
and guidance in
teaching
me the ins and outs of his algorithm. His open exchange of expertise was a refreshing and
rewarding experience I shall never forget.
Finally,
to my wifeNancy
and son Maxwell goes a great sense of debt and appreciation for their patience andloving
support. The hot chocolate sustained me through those
long
nights of "basement exile". Without their encouragement, I
TABLE OF CONTENTS
Page
Abstract vi
List of Tables viii
List of Figures ix
Introduction 1
1. 0 Review of Literature 8
1. 1 A Fast Method 8
1. 2 A Method for Large Systems 19
2. 0 Testbed Description 23
2. 1 Design Criterion 23
2. 2 Testbed Design 24
2.2.1
Geometry
243. 0 Digital Controller 29
3. 1 System Description 29
3. 2 Power Amps 32
3. 3 Noise Sources 37
3.3.1 A/D and D/A Converters 37
3.3.2 Sensors 38
4.0 System Identification Algorithm Description 40
4. 1 Overview of PLID 40
4. 2 Mathematical Framework 45
4.2.1 Extended State Model Definition 45
4.2.2 Stochastic Extended State Model 50
4.2.3 PLID Equations 55
5. 0 MATLAB Simulation Results 65
5. 1 Direct Implementation of PLID 65
5.1.1 Test Model 1 65
5.1.2 Test Model 2 71
5.2 Square Root Filter Implementation of PLID 73
5.2.1 Full Order Test Model 3 74
5.2.2 Reduced Order Models: 9 Modes 81
5.2.3 Reduced Order Models : 12 Modes 84
6. 0 PLID Testbed Results 98
6.1 MIMO Models 102
6.1.1 Initial Results 102
6.1.2 Refined Results 108
6.2 SIMO Models 112
6.2.1 Initial Results 112
6.2.2 Refined Results 118
7. 0 Conclusions 144
8 . 0
Summary
149References
Appendix
A) MATLAB Code
Al)
Directly
Coded PLID Al-1 to Al-41A2) PLID Square Root Filter Code . . . . A2-1 to A2-69
B) C Code for Data Acquisition Bl to B21
C) Drawings of Testbed Cl to CIO
D) NASTRAN Model Data Deck Dl to D13
E) Power
Amp
Schematic ElG) IFORSELS
Theory
G1-G7H) Testbed Design H1-H26
H2. 1) Testbed Design Criterion HI
-H3
H2. 2
)
Testbed Design H4-H5
H2 .
3)
Instrumentation H6-HI 8
H2.3.1) Sensors H6
-H10
H2.3.2) Actuators Hll
-H18
H2.3.2.1) PZT Equations Hll
-H18
H2.4) NASTRAN Analysis H19
-H26
H2.4.1) Brief Intro, to NASTRAN .... HI 9
-H21
H2.4.2) Model Description H21
-H23
H2.4.3) Sensor & Actuator
Modeling
. H24ABSTRACT
Thisthesis dealswiththe experimental application of a systemidentificationtech
nique called pseudo-linear identification (PLID). PLID is a
discrete-time,
multi-input,multi-output
(MEMO),
state space, simultaneous parameter estimator and one step aheadstate predictor oflinear time invariant systems. No measurements are assumed perfect
under
PLED;
thatistheinputs and outputs are allowedto havezero mean white gaussian(ZMWG)
additive noise.Furthermore,
the states are also assumed to have additiveZMWGnoise.
Like most systemidentification
techniques,
PLED requires the systemto be completely controllable and observable under the given actuator and sensor suite. The only
firm assumption made on model structureis that the transferfunction be strictly proper;
that
is,
thefrequency
response isbounded
and tends towards zero asfrequency
is increasedtoinfinity. Poleand zero locationsare not confined;
indeed,
unstable systems canbe
identified,
andfurthermore,
they
canbe controlled becausePLED provides simultaneous one step ahead state predictions. Developed
by
Hopkins et. al. in 1988[1],
thismethod has seenlittle application(due in part to its youth);
however,
it is shown in thefollowing
pages tobe a powerful techniquefor performing state space system identification,
aswellas on-line model order reduction.The experiment involves applying PLED toa 3-Dimensional
(3-D)
kinematic trussstructure (referred to here forward as the
"testbed")
in abatch
mode (off-line). Batchmode
identification,
by
definition,
implies that the testbed does not change appreciablybetweenthe time itwas identified andthe time itwill be controlled. Formost
kinematic
structures, this is true. PLED can be used for real-time
(on-line)
systemidentification.
and the
high
bandwidth of control (hundreds ofhertz),
this is not possible with currentpersonalcomputer
(PC)
based
controllers.Ultimately,
the state space model generatedby
PLED will be used to design a closedloop
controller forthe testbed thatwill increase itsdamping
twenty
fold,
from approximately 0.25% zetato 5% zeta. Dueto time constraints, we will only show simula
tionresults oftheclosed
loop
system.List of Tables
Page
Table
3.2-1)
Pole/ZeroLocations ofPA-85 Witha luF Load 34List of Figures
Page
1-1)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n= lOOdB 91-2)
PZ-Map Results,
Red=EDd,
Green=ActualPlant,
s/n= 1 OOdB 101-3)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=60dB 1 11-4) PZ-Map Results,
Red=EDd,
Green=ActualPlant,
s/n=60dB 1 11-5)
BodeResults,
Red-o
=EDd,
Green=ActualPlant,
s/n=50dB 121-6)
PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n= 50dB 131-7)
BodeResults,
Red-o=EDd,
Green=Actual
Plant,
s/n=30dB 141-8) PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n= 30dB 141-9)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=50dB 151-10)
BodeResults,
Red-o=EDd,
Green=Actual
Plant,
s/n=90dB,
36states... 16 1-11)
PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n=90dB,
36states... 171-12)
BodeResults,
Red-o=EDd,
Green=Actual
Plant,
s/n=60dB,
36states... 181-13) PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n-60dB,
36 states... 182-1)
EFORSELS Algorithm Basic Flow Diagram 20Fig.
2.2-1)
Rough SketchofStructure 24Fig.
2.2.1-1)
Top
View Line DrawofStrutsandUpper Delta Frame 25Fig.
2.2.1-2)
SideViewofTestbed 26Fig.
2.2.1-3)
Cut-away
ofSquare Actuator Adapter SectionofSupportTubes 27Fig.
3.1-1)
PartialTimeline onPC using MS-DOS 31Fig. 3.2-1)Open
Loop
Gain PlotofthePA-85 Witha luTLoad 35Fig.
3.2-2)
OpenLoop
Gain Plot With CompensationRcCc
36Fig.
3.2-3)
OpenLoop
Gain Plot With Compensation&FeedbackPole 36Fig. 5.1.1
-1
)
Maximum AbsoluteParameterand State Prediction Error- Noiseless 67Fig.
5.1.1-2)
State|Actual-OneStep
AheadPrediction|: Noiseless 68Fig.
5.1.1-3)
Actual(red)
vs.Estimated(green)
Transfer Functions- Noiseless 68Fig.
5.1.1-4)
Actual(red)
vs. Estimated(green)
Transfer Functions- s/n=28dB 70Fig. 5.
1.2-1)
ConvergencePlotforModel 2with6dB s/n 71Fig.
5.2.1-1)
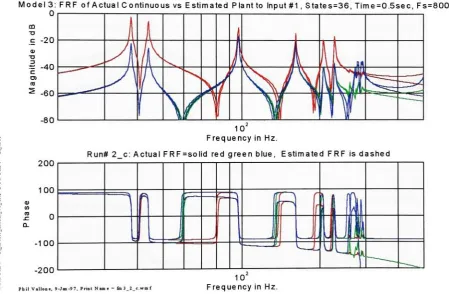
MagnitudeandPhaseBodePlotforModel3,
ContinuousTime 75Fig.
5.2.1-2)
BodePlotforModel 3 ActualContinuousPlantvs. Estimated Discrete ....76Plant
Fig.
5.2.1-3)
Bode Plot for Model 3 Actual Discretized(ZOH)
vs.Estimated Discrete...77Plant
Fig.
5.2.1-4)
Bode PlotforModel 3 ActualDiscretized(ZOH)
vs.Estimated Discrete... 78Plant
Fig.
5.2.1-5)
Max. Sensor Prediction ErrorforModel 3 79Fig.
5.2.2-1)
MagnitudeandPhase Bode PlotforModel3,
18 StateEDdModel 81Fig.
5.2.2-2)
Max. Sensor Prediction Error for Model3,
18 States 82Fig.
5.2.2-3)
MagnitudeandPhase Bode Plot for Model3,
18 State EDdModel,
Low...83Noise
Fig.
5.2.3-1)
Max. Sensor Prediction Error for Model3,
24states 84Fig.
5.2.3-2)
MagnitudeandPhase Bode PlotforModel3,
24StateEDdModel,
85LowNoise
Fig.
5.2.3-3)
One-step-aheadSensor Predictionvs. ActualOutputModel3,
24 States...86Fig.
5.2.3-4)
Magnitude&Phase BodePlot for Model3,
24 StateEDdModel,
87Low Noise 3200samples
Fig.
5.2.3-5)
PZMap
ofModel3,
24 State ED Model BeforeandAfter Stabilization 89Fig.
5.2.3-6)
Magnitude&PhaseBodePlotforModel3,
Unstablevs. Stabilized 90Estimate
Fig.
5.2.3-7)
ActualSensor(green--)
vs.KalmanEst.,
Model3,
23 StateModel 91Fig.
5.2.3-8)
ActualSensor(green-)
vs. KalmanEst.,
Model3,
23 State Model 92Fig.
5.2.3-9)
Magnitude& PhaseBodePlot forModel3,
Openvs. ClosedLoop
93Fig.
5.2.3-10)
Magnitude & Phase Bode PlotforModel3,
Openvs. Closed 94Fig. 5.2.3-1
1)
OpenLoop
Sensor Output(green--)
vs. ClosedLoop,
Model3,
95 23 StateModelFig.
5.2.3-12)
Magnitude & PhaseBode PlotforModel3,
Openvs 96 ClosedLoop,
X/U=1000Fig.
5.2.3-13)
OpenLoop
Sensor Output(green-)
vs. ClosedLoop,
97 Model3,
X/U=1000Fig.
6.0-1)
ExperimentalTF PlotsfromtheHP,
Before(left)
& AfterAdding
99 WeightsFig.
6.0-2)
D/AOutputTimeHistory
Sketch(ZOH) Showing
High Freq. Steps 100 Fig.6.0-3)
ExperimentalSetup
(final configuration) 101 Fig.6.1.1-1)
14 StateModelvs.theFFTdTimeHistory
Data 103 Fig. 6.1.1-2)
HPSineSweep
TFvs.theFFTd TimeHistory
Data 105 Fig.6.1.1-3)
HP SineSweep (green)
vs. thePLEDTF(blue),
14 states 106 Fig. 6.1.1-4)
HP SineSweep
(green)
vs. thePLED TF(blue),
18 states 107 Fig.6.1.2-1)
HP SineSweep (green)
vs. thePLED TF(blue),
24states 108 Fig.6.1.2-2)
HP SineSweep (green)
vs. thePLED TF(blue),
24states(Z3/U1)
109 Fig. 6. 1.2-3)FFTdTimeHistory
Data(red)
vs. thePLED TF(blue),
24states 110 Fig.6.1.2-4)
HP SineSweep
(green)
vs.thePLED TF(blue),
30 states IllFig.
6.2.1-1)
Actuator Input #1 TimeHistory
113Fig.
6.2.1-2)
Sensor Response TimeHistory
toActuatorInput #1 114 Fig.6.2.1-3)
Abs. Max.1-Step
AheadSensorError,
30 states,Ul,
NoAve 115 Fig.6.2.1-4)
HP SineSweep (green)
vs. thePLED TF(blue),
30 states,Ul,
No Ave. .. 1 16Fig. 6.2.
1-5)
FFToftheTimeHistory
Data(red)
vs. PLED TF(blue),
30 states, 117Ul,
NoAve.Fig.
6.2.2-1)
HP SineSweep (green)
vs.FFToftheTimeHistory
Data(red),
1 19 9AveragesFig.
6.2.2-2)
HP SineSweep (green)
vs.thePLED TF(blue),
30 states,Ul,
120 9Ave.,
1=450Fig.
6.2.2-3)
Abs.Max.1-Step
Ahead SensorError,
30 states,Ul,
9 Ave 121Fig.
6.2.2-4)
HPSineSweep (green)
vs. thePLED TF(blue),
30 states,Ul,
121 9Ave.,
1=326Fig.
6.2.2-5)
FFToftheTimeHistory
Data(red)
vs.PLED TF(blue),
30 states, 123Ul,
9Ave.Fig.
6.2.2-6)
FFToftheTimeHistory
Data(red)
vs. PLED TF(blue),
30 states, 124Ul,
9Ave.Fig.
6.2.2-7)
HP SineSweep (green)
vs.thePLED TF(blue),
30 states,Ul,
125Zl,
1=326Fig.
6.2.2-8)
HPSineSweep (green)
vs. thePLED TF(blue),
30states,Ul,
125Z3,
1=326Fig.
6.2.2-9)
FFToftheTimeHistory
Data(red)
vs. HP TF(green),
U2-Z3,
126 10AveFig.
6.2.2-10)
FFTofthe TimeHistory
Data(red)
vs. PLED TF(blue),
U2-Z3,
128 30States,
10Ave.Fig.
6.2.2-11)
Abs.Max.1-Step
Ahead SensorError,
30 states,U2,
10Ave 129Fig.
6.2.2-12)
FFToftheTimeHistory
Data(red)
vs. PLED TF(blue),
U2-Z3,
12930
States,
1=455Fig.
6.2.2-13)
SensorOutput(green-o)
vs. PLED's1-Step
AheadPrediction(red),
130U2-Z3
Fig.
6.2.2-14)
Sensor Output(green-o)
vs.PLED's1-Step
AheadPrediction(red),
131 ZOOMFig.
6.2.2-15)
Sensor Error(blueline)
vs. CPU(486-66)
Cost(cyanbars)
132Fig.
6.2.2-16)
FFToftheTimeHistory
Data(red)
vs. PLED TF(blue),
133U2-Z3,
64 StatesFig.
6.2.2-17)
FFToftheTimeHistory
Data(red)
vs.HP TF(green),
U3-Z1,
134 8Ave.Fig.
6.2.2-18)
SensorOutputTime Histories: Samples3500to 5550 135Fig.
6.2.2-19)
Abs. Max.1-Step
Ahead SensorError,
30States, U3,
8Ave 136Fig.
6.2.2-20)
HP SineSweep (green)
vs.thePLED TF(blue),
30States,
136U3-Z1,
1=410Fig.
6.2.2-21)
HP SineSweep (green)
vs. thePLED TF(blue),
6States,
138INTRODUCTION
Building
uponthework ofSalutet.al.[2]
and Chenet.al.[3],
Hopkinset.al.[1]
derive a method ofsimultaneously estimating the system parameters and predicting the
one-step ahead state vector ofthe most up to date system estimate. As the above sen
tence
implies,
the process of state and parameter prediction/estimation isa recursive one.This is different from a
"bootstrap"
method where the state and parameter estimates are
carried out separately.
The algorithm developed
by
Hopkins et.al. is called pseudo-linear identification(PLED)
whichgets its name, in part, fromthe algorithm nonlinearities that arise from simultaneous parameter and state estimation. PLED appliesto
discrete-time, linear,
multi-input,
multi-output(MEMO)
stochastic systems, whoseinputs,
outputs, and states are allcorrupted
by
ZMWGnoise with known auto and cross covariances. Conditioned on allpast
history
ofthe input and output measurements up to andincluding
the currenttime,
PLEDisshownin Hopkinset.al. tobetheoptimal conditional meanestimator,inthemean
squareerrorsense.
Hopkinset.al. go onto showthatPLEDconverges to the true systemparameters
w.p.l. Ofcourse, such convergence can only be guarantied ifall conditions previously
mentioned are met.
However,
PLEDisrobusttodeviationsfromthoseconditionsthat willyield optimal performance and certain convergence.
Indeed,
it is shownhere that PLEDremainsa
highly
usefultool forthe system identification(SYSED)
ofslowly time varying,weaklynon-linear,infinitedimensionalsystems.
The bulkofthisworkinvolves anin-depthapplication ofPLEDto afour foot
tall,
by
piezo-ceramic wafers and sensed using piezo-ceramic based accelerometers. PLED isapplied in abatch mode, wherethe
input/output
data is collected using aPC based dataacquisition system and processed using a MATLAB implementation ofPLED cast in a
square root filter form for maximum numerical accuracy and stability. The identified
modelis tobe used ina state feedbackcontrol system whose purposeis to reducevibra
tions. Closed
loop
control results were not availabledue
toalackof a suitable computercontroller;
however,
some candidatecontrolmethods arediscussed.By "slowly
time-varying"we meanthatthe system whoseinput/output data is be
ing
processeddoesnot changein a meaningfulwayfasterthanPLED canreacha satisfactory
level of convergence to the plant parameters. Thatis,
since PLED will continuallyconverge, at some pointtheuser willbe satisfied that themodel isof sufficient
fidelity
to be used inthe proposed application.Depending
onthe system order and available compute power,convergence can require anywherefrom lessthana secondtomanyhours. Ef
thesystemistimeinvariantrelativetoboth the convergence speed andthe maximumtol
erable modelerror,thenPLEDcanbeusedsuccessfully for SYSED.
"Weakly
non-linear"is also subject to the relative metric of
"satisfactory
convergence"
Iftheactuationlevelsusedtoexcitethe systemto collect sensor
data
are similarto thoselevels expected
during
operation, and any deviation from such a case results inacceptable modelerror, thenPLED canbeused. Forthe testbed investigated
here,
a2x (6dB)
increase inthe actuationlevels
results in noless
than a 1.78x (5dB)
increase inthesensoroutput. Forthisstudy, suchnon-linearityisacceptable. Eachcasewillbe
different,
and no "ruleof
thumb"
generally
applies.A mathematical description ofthe testbed's vibrational characteristic is
desired.
This is often referred to as characterizingthe eigenstructure ofthe testbed. Contained in
ei-genvectors (mode shapes). Aset of each ofthese parameters is obtained foreach vibra
tionalresonance ofthestructure.
Being
adistributed or continuoussystem(as opposedto adiscrete
orlumped-parameter
system),the testbed has ahugenumberofresonances extending
from afew
hertz to beyond a gigahertz, with possibly billions ofunique reso nances withinthisbandwidth.Fortunately
for structural vibrationcontrol applications we aretypically
only inter ested in vibrations below say 10 or 20 kHz. For this investigation we arelimiting
thebandwidthto below200 Hz. Evenwith thebandwidth limited to 200
Hz,
we still mustcontend with dozens of
lightly
damped vibrational resonances (often called "resonantmodes"
or simply "modes"). Recallfrom basic physicsthat atthe
frequency
of a particular resonance, the system is
largely
acting as a simple spring-mass-dashpot (orR-L-C)
systemwithadominantspringand mass exchangingkineticand potentialenergy harmoni cally. Suchasystemrequirestwo statesto describethe"state"ofthe twoenergystorage
devices.
Thus,
foratestbedwith 18modesbelow200Hz,
36states are requiredtomodel this system. Although 36 states is small relative to some complex systems, it quite sufficientlydifficultto
thoroughly
testPLED.This testbed consists of6 tubular struts, (3 feet
long)
which rise up from abasefrom three points. That
is,
2 ofthe 6 struts (referred to asbipods)
are anchored to thesamepoint, andthese 3 pointslie ona circle thatis approximately 30 inches indiameter.
One strut from one bipod then connects to a strut from an adjacent
bipod, forming
3points where struts meet atthe upper end. Uponthese three points is set a
heavy
prism shaped truss structure, 12 inches on a side, which is meant to behaverigidly
in our fre quency band ofinterest. This upper prism-shaped truss structure is referred to as the "UpperDeltaFrame"Eachstrut
has
adifferent
cross-sectional area. This wasdonetobreakupthetest-bed's symmetryto
increase
couplingbetween
thevibrational resonances.The overall goalistoreducethe vibrationspresentintheUDF.
Thus,
sensors areplace on theUDF. Tomake theproblem non-trivial, but of reasonable complexity, three
accelerometersare placed atthecorners oftheUDFjustabovethepoints wherethe struts
meet. Since all non-acoustic vibrations must be coming up from the struts, the logical
placefortheactuatorsisonthe strutsthemselves.
Theactuatorswerealso placedthereforan additional purpose. Onemightwonder
whywedidn'tuse an actuatorthatcouldbe"collocated"withthesensor,there
by
reapingall ofthebenefitsofcollocation. Wefeltthat with a model of sufficientqualityand acon
trollerdesigned
intelligently,
collocation should notbeanecessaryconditionforsuccessfulloop
closure.Further,
sometimes collocationhas itsown setofproblems, such as a physical
inability
toplacebothsensor and actuatorinthesamelocation.Acting
as arigidbody,
the UDF willhave 6 resonances, 1 for each ofits degreesoffreedom (DOF).
Again,
the springsactingupontheUDF arethe6 struts. Ifeach strutwere exactly the same, and the UDF were precisely symmetric, then the UDF's 6 reso
nances would consistof:
1)
delta-Zmode(i.e.;
translating
inthevertical orZdirection), 2)
atheta-Zmode wheretheUDFrotates aboutthe
Z-axis,
3)
atranslationalmode wheretheUDF vibrates parallelto the floor inthe Xdirection or "delta-X mode"
(as defined
by
aCartesian coordinatesystem),
4)
adelta-Ytranslationalmode,5)
atheta-X(tip), 6)
and atheta-Y
(tilt)
mode. Thetheta X and Ymodes are often coupled withthe delta Xand Ymodes
by
structural non-uniformity. We wish to increase this coupling so that we canobserve all6resonances withour 3 sensors. To do
this,
we simplyvariedthe wall thickness of each strut. Inthisarrangement, eventhe theta-Zmodewill cause sometranslation
due to the varying stiffnesses, each strut will allow different
deflections,
thusinducing
motions otherthanpuretheta-Z.
Eachofthesestruts will have its ownresonances, sincethe strutshave both stiff
ness
(K)
and mass (M).Being
essentially onedimensional,
each strut will vibrate much likeastring,forming
numerousharmonics
withincreasing
frequency. Eachstrutwillhave2first
bending
modes whose spatial wavelength istwice thelengthofthe strut. Eachwillhave 2 second
bending
modes with wavelengths equal to the strutlength,
vibrating atsome higher
frequency,
followed infrequency
by
athird mode, and so on.Being
3 feetlong,
these struts are almost certain to have at leasttheirfirstbending
modes below 200Hz;
thatis,
these6 struts will add 12modes or24statesto themathmodel.These modes willgreatly complicate ouranalysis, so we soughtto minimize their
observability fromthe accelerometers.
By
makingthe UDF asheavy
as possible and the struts aslightas possible we reducethedynamic influencea strut canhaveontheUDF. Aheavily
constructed UDF hasthe added benefit ofmaking it as rigid aspossible, eliminating
its own resonances from our bandwidth (0-200 Hz). This worked reasonably wellwiththefirst 12
bending
modes ofthe strutswhich were measured at afrequency
of-60Hz. The 6 rigid
body
modes fell between 130 and 250Hz,
intermixed with the strut's secondbending
modes whichwere between 215 and 240 Hz.Falling
between 310 and 350Hzwerethe thirdstrutbending
modes. Nosignificantmodes were observedbetween 350and450Hz.All 6 struts were instrumented with piezoelectric wafers at their mid-points. To
reducethe number of channels needed in our
data
acquisition system, we wired 2 ofthe strutswhichhavea commonupper vertexto actuateinunison. Thatis,
they
were drivenDespitethe weight ofthe
UDF,
one ofthe twelve 2nd strutbending
modes was"strong"
enoughtohavea significant gain.
Thus,
6 UDF+ 1 strut modes(14 states)weretobemodeled. Of
these,
3 fell below200 Hztobecontrolled;i.e.,
damped orattenuated.To
help
limit highfrequency
resonancesfrom aliasing backinto ourbandwidth ofinterest,
1 pole analog low pass filterswere placed at afrequency
of120 Hzbefore theinput to theactuators. For additional anti-alias protection2pole Butterworth smoothing
filters
(Fb
= 1300Hz)
were used tofilter the command signalto theactuator. PLED willhavetoalso account forthe 120 Hzfilterpole,
increasing
thenumber of statestobe identified to 15.
Further,
the 2pole anti-aliasfilter,
although at a muchhigherfrequency,
willcausea significant phase shiftto occur at 200 Hzandthusmust bemodeled,
bringing
thetotalto 17 states.
Afewmore states willbeneededto"smoothover"
the smallripplescaused
by
thestrut'sfirst
bending
modes. Wewishto smoothoverthesemodes so as not to wastetoomany states capturing detailsthat are only 5 dB in magnitude and are at an overall low
gainlevel.
Using
a sample rate of8*200 Hz = 1,600Hz,
data was collectedby
exciting allthreeofthe actuators,while simultaneouslyrecording the sensor outputswith 12-bit ana
log-to-digital
(A/D)
converters. PLED's accuracy was tested with model sizes rangingfrom6to 64states. Both MEMOandSEMOmodels were generated.
Eachmodel was comparedto experimental transferfunctions generated
by
ahighresolution sine-sweep using the Hewlett Packard 3 562A Dynamic Signal Analyzer (here
forwardreferredtoas the"HP"). Acomparisonwasalso madebetween PLED'sone step
ahead sensor prediction to theactual measured sensor output. This "signal to prediction
error"
The SEMOmodels performedthe
best,
witha signalto prediction errorratio of46 dB. Thatis,
the sensor signalRMS was46dB or200x higherthanthe sensorerror. Consideringthat the 12-bit A/D convertershave approximately60dB oftotaldynamicrange, theresults areveryencouraging.
We feel that these SEMO models could be combined to yield a MEMO model of
equivalent quality. This is an area of current research andwill onlybe
briefly
touched onhere.
Using
thesemodels,a modern controllerissimulated. Dueto computerlimitations1.0
Review
of
Literature
Dueto thelengthand experimental nature ofthis
thesis,
wehavenot made a comprehensive review ofthe numerous publications onthis subject.
Instead,
wehave chosentoresearch2methodsthat the authorfeels haveparticular merit and
applicabilityto plants
similar to ours.
Furthermore,
the systemidentification
methods described below arecommercially available, allowingthe readerto obtain the algorithms without requiring an
extensive coding effort. These methods have a proven track record, and have been ap
pliedtoa wide range of systems.
1.1
A
Fast Method
The firstmethod was developed overmany years
by
researchers in different engineeringfields. Itwas, inasense, summarized and popularized
by
Benjamin Friedlanderin August of1982,
in his paper"Lattice Filters for AdaptiveProcessing" [4]. Et was com mercializedby
a company calleddsp
Technologies. Atdsp
Technologies,
Dick Benson coded the algorithm into a portable device called "SigLab 20-22". SigLab contains a Texas Instruments(TI)
C3 1 DSP chipwhichrunsthealgorithm atnearreal-time rates. A 40thorder S1SOrunmay onlyrequire 10to 30 seconds. Themethod (as implemented
by
dsp
Technologies)
appearstobe limitedtoabout50 state S1SO systems,butthiscovers arelatively large set of real world problems and thus it deserves attention
-if for nothing
elsebut itsspeed.
We havecodedthe algorithminMATLAB and applied itto some ofthe data sets
that were obtained from the actual testbed.
Showing
these resultsjumps
the gun abit,
datawas obtained
is
explained in great detail in subsequent chapters. A verybriefoverview ofthe
theory
behind
thismethodisprovidedinAppendix F.Several simulations were made usingthe lattice filter. Five pages ofMATLAB
code is all it
takes,
indicating
the algorithm's simplicity.First,
a simple 6thorder SISO
system was simulated and runthrough thelatticeED. Noisewas added to thesensor sig
nal, andisshowninall oftheplotsbelow. Westartedwithaveryhigh
(unobtainable)
sig nalto noise(s/n)
ratio of100 dB as abaseline test. As expected, the algorithm did verywell, essentiallyexactly matchingthebodeplot acrosstheentirebandwidth. Mostimpres
siveistheruntime. It onlytookapproximately 10 secondstorunthrough40time steps.
Clearly,
thisisaverycomputationallyefficient method.40
3
20D)
CO
Bode PlotofIDd in Red-ovs.Acutal in SolidGreen,Signal/Noise=100dB
-20
10 10
Frequencyin Hz
10
0
d) S-100
c
CD
10
|-200
ann
IDd in Red-ovsAcutal iiSolidGreen,Signal/Nose= 100dB
10'
Phil Vallane, 16-Jan-97, Print Name=ltb IOOdb.wmf
10'
FrequencyinHz
10J
Fig. 1.
1-1)
BodeResults,
Red-o=
EDd,
Green=ActualPZ mapofIDd Poles&Zeros inRed,Acutal inGreen,Signal/Noise=100dB
1 I 1
^ >
\
i i
/
c\
X >./
\
//*
\
1
\
1/
Near Perfect\
oMatch
(
Somedistortionof
\
dead-beatzeros,withV
noeffect onBode.x
/
\. c> x /
^v^^
> :i 0.8 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1 -1 -0.5
PhilVallone, 16-Jan-97. Print Name=ltmlOOdbwmf
0.5
Fig.
1.1-2)
PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n= lOOdBNext wetried a
high,
but obtainable s/n ratioifa 16bit A/Dwereused to collectthedatausinga highprecisionsensor;with 16
bits,
80 dB is possible. Thebode plot stillshowsvirtuallyno error(not shownfor brevity).
However,
thedead-beatzeros(nearz=OjO)
aremoving awayfromtheiractual location. Becausethe movementis symmetrical,and
they
surroundthe truezerosat z=OjO,
thereisvirtuallynobode distortion.Sincewe areusinga 12bitconverterwhoseLSB is toggling, 60dB s/nisachiev
able;Fig. 1.1-3 showsthebodeplot.
Still,
only a slightdistortionis
visible nearthe peak at 500 Hz. With such an accurate bode plot, one would expect that thePZ-map
would still be nearlyperfect.Interestingly,
this is not the case. All ofthe estimated poles and40
20
Bode PlotofIDd in Red-ovs.Acutal in SolidGreen,Signal/Noise=60dB
ro s 0
-20
-e&X
^^^ v^
V
L
\
\s10' 10'
FrequencyinHz
IDdin Red-ovsAcutal in SolidGreen,Signal/Noise=60dB
0| OOOOOqQDGIiOClClopQt
10
PhilVallone, 16-Jao-97.Pnnt Name=kbfiOdb.wmf
10'
Frequencyin Hz
Fig.
1.1-3)
BodeResults,
Red-o =EDd,
Green=Actual
Plant,
s/n=60dBPZ mapofIDdPoles & Zeros inRed,Acutal inGreen,Signal/Noise:
1
60dB
-1 -0.5
Phil Vallone. 16-Jan-97, PrimName=ltmfiOdb.wmf
Fig.
1.1-4) PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n=60dBReducing
thes/nto50dB,
we can now see about a 1 dB error nearthe2ndpeakat 500Hz,
with acorresponding
phase error of7(seeFig. 1.1-5). These are stillvery smallerrors which concealtheturbulenceseeninthe
PZ-map
ofFig. 1.1-6.40
Bode PlotofIDd in Red-ovs.Acutal in SolidGreen, Signal/Noise =50dB
S
20c
CD
-20
)(D)OCOD CS.
10 10'
Frequencyin Hz
10
IDd in Red-ovsAcutal in SolidGreen, Max. Error=
0.8046dB, 7.289Deg 0
CD
Q -100
s <1) o nj * cl -200
-300
-10
Phil Vallone,16-Jan-97,PrintName=ltb50db.wmf
10z
Frequencyin Hz
10s
Fig.
1.1-5)
BodeResults,
Red-o=EDd,
Green=ActualPZ mapofIDd Poles & Zeros inRed,Acutal inGreen,Signal/Noise=50dB 1
-1 -0.5
PHIVallone, 16-Jan-97,Print Name=ltm50db.wmf
Fig.
1.1-6) PZ-Map
Results,
Red=EDd,
Green=ActualPlant,
s/n=50dBFromthe
PZ-map
ofFig. 1.1-6 (50 dB case)onemightthink that thesearen't eventhesame system sincethereisa zero at
0.5+jO,
and only 1 complex poleisnearthe2pairsnear0.5j0.5.
Still,
thebode plot tellsus that this model is good enough for even highprecision control systemdesign.
Et is not until we decrease the signal to noise ratio to 30 dB that we see serious
model error. Even so, thebode plot accuracy isnot un-usable, againdespitetheugliness
ofthePZ-map. En the experimentalworld, one does not havethe
luxury
ofoverlayingED'd and actual pole/zero locations on the z-plane. We can only rely on thebode plots
and time domain data.
Furthermore,
as we have seen, thePZ-map
is misleading and canmake one conclude that a model is "bad"
when it is quite useful.
Thus,
in subsequentchapters,we stop showingthe
PZ-map
toavoidneedlessly wastingspace.40
BodePlotofDd in Red-ovs.Acutal in SolidGreen,Signal/Noise=30dB
20
CD
-20
-40
100
o-100
-200
10' 10'
Frequencyin Hz
Dd in Red-ovsAcutal in So6dGreen,Max. Error=1428dB, 1 3.76Deg. 10
-300
o o ,m nrrir-> nrn min ^fir
0
3
10
PhilVallone, 16-Jan-97,Pnnt Name=ltb30db.wmf
10'
Frequencyin Hz
10
Fig.
1.1-7)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=30dBPZmapofIDdPoles & ZerosinRed,AcutalinGreen,Signal/Noise=30dB
PhilVallone.16-Jan-97. Pnol Name=ltm30dbwmf
Fig.
1.1-8) PZ-Map
Results,
Red=EDd,
Green=ActualTotest the algorithm's sensitivityto relatively fastgain/phase changes
(i.e.,
lightly
damped
dynamics),
a complex zero was added at -0.3+0.85J which has a magnitude of0.901. Thisisnot a changeinmodel order,just bodemagnitude. Asexpectedwithan80
dB s/n,thematchisvery good,
having
only 0.03 dB gain and 0.1phase maximum errors.
Decreasing
the s/n ratioto 50 dB createsa model error significant enoughtobe apotential problem for a high performance controller. This error (seen in Fig.
1.1-9)
hascreated a 21 dB mismatch which is much worse than the 0.8 dB error seenin Fig. 1.1-5
whichhasthe same s/n ratio.
Thus,
it appearsthat thealgorithmis significantlymore sensitive to
lightly
dampeddynamics;
which is expected sincelightly
damped dynamics areinherently
more sensitivetopole-zero migration error.CO
40
20
Bode PlotofIDd in Red-ovs.Acutal in SolidGreen,Signal/Noise=50dB
-20
-40
iq
<5
10 10
Frequencyin Hz
IDd in Red-ovsAcutal in SolidGreen, Max. Error=21. 01
dB, 74.84Deg.
0i o oc cdo cpD auumiu,
CT) -100 CO Q O c p 01 -200 .S3 (O u (0 _C .c "H Q_ -300 n fi c -400 c 1 p 10 10
Frequencyin Hz
PhilVallone, 16-Jan-97,PrintName=Itb50db2.wmf
Fig.
1.1-9)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=50dBFinally,
a large (36 state) model was simulated and run through the lattice ED.This model isreferredto as model #3 and is described inmore detail in chapter
5,
so wewill notdiscuss it here. Twocaseswererun, 1 nearlynoiseless(90 dB s/n) and 1 with60
dB,
aboutthesame noiselevelas was appliedtoPLED.Runtime for 400
iterations
wasjust over 10 minutes, which is very fast indeed.With 90 dBs/n,thealgorithmdidverywell. Some distortionoccurs near
Nyquist,
butthisis not unusual and a control system should notbe operated nearthis
frequency
anyway.The weaklyobservable modes near300 Hzare not modeledwell, butthey'regoingto bea
difficultchallenge for any systemidentificationmethod (Fig. 1.1-10). The
PZ-map
showswhythesemodes are not modeledwell, andwhathappenednearNyquist(Fig. 1.1-11).
Bode PlotofIDd In Red-ovs.Acutalin SolidGreen,Signal/Noise=90dB
-20
O^Bk
10 Frequencyin Hz
IDd in Red-ovsAcutalin Solid Green,Max. Error=4.251dB,
402.6Deg 200
100
-100
-200
PhilVallone,16-JM-97, Print Name=hb90db.wmf
o
t>
ft.
f
>"t
IH
fl
!*
o o 9 1 >L < > < c o1 > o o o o (
Li
'aTi^
o
10 Frequencyin Hz.
Fig.
1.1-10)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=90dB,
36 statesPZ mapofIDd Poles & Zeros inRed,Acutal inGreen,Signal/Noise=90dB
I,
-1 -0.5
PhilVallone,16-Jan-97,PrintName=ftm90db.wmf
Fig.
1.1-11) PZ-Map
Results,
Red=EDd,
Green=Actual
Plant,
s/n=90dB,
36statesWhenthes/n ratioisreducedto60
dB,
significant errors are seen.Still,
themodel is not useless, and with time averaging and some other tricks ofthe trade the s/n ratiomightbe increasedto thepoint where model erroristolerable. En
fact,
ifall we wantedtodo is
damp
the 1sttwo modes, thismodelwouldprobablybesufficient.Clearly,
this technique isworthputting in one's"SYSEDToolbox"
Its computa
tion efficiency,andthus speed, makeit averyattractive choiceforSISO SYSEDwhenthe signaltonoise ratiois high. A MEMO extensionmaybepossible,but is beyondthe scope ofthisthesis(perhapsanotherdegree...).
Bode PlotofIDd in Red-ovs.Acutal in SolidGreen,Signal/Noise= 60dB
m .20
-40
-60
-80
200
100
o at
8* b
o
Q C
o- -100
-200
10
Frequencyin Hz.
IDd in Red-ovsAcutalin SolidGreen,Max.Error=41.21dB, 1575Deg
}
f
>;
r
i
tA
-L
I
> ( >im mP
o TJ
10' Frequencyin Hz.
PhilVallone.16-Jan-97,Print Nam e=1tb6 0db2.wmf
Fig.
1.1-12)
BodeResults,
Red-o=EDd,
Green=ActualPlant,
s/n=60dB,
36statesPZ mapofDdPoles & Zeros inRed,AcutalinGreen,Signal/Noise=60dB
-1 -0.5
PhilVallone,16-Jan-97, Print Name=h.m60db2.wmf
Fig.
1.1-13)
PZ-Map Results,
Red=EDd,
Green=ActualPlant,
s/n=1.2
A
Method
for
Large Systems
Althoughthe
lattice
filter methodis powerful, it hasdifficulty
with models of50states or
larger,
and as ofyet,we do notknowof aMEMO extension. The secondtechniquedescribed herewas
developed
by
Dr. RobertJacques,
who'smethodissoldby
ACXwhich also currentlyemploysDr. Jacques. MATLAB
based,
the technique has aconvenient
interface,
and ishighly
automated. There are very few techniques which offer thislevel of automation combinedwiththislevel ofqualityresults. The underlying code was
putinto FORTANMEX-files forultimate speed. Thetechnique istoo complexforusto
code
here,
but we wishto describe itand discusssome oftheresultsthat ACXadvertisesthismethod can achieve. Appendix Ggives abriefoverview ofthealgorithm'stheory.
"On-line System Identification and Control for Flexible Structures"
is the title of
Dr. Jacques'
thesis,
datedMay
1994fromtheMassachusetts Institute ofTechnology,
andsponsored under a NASAgrant NAGW-1335 [5]. This has only recently (in
1995)
became commerciallyavailable. Theterm"on-line"isusedtodescribeabatch SYSEDtech
nique which can onlyhandleslow orinfrequenttimevariationsoftheplant;
i.e.,
those thatoccuroverhours. Itison-line inthe sensethatnohuman interventionisneededto spring theSYSEDintoaction,but it isnot adaptive sincethe systemidentificationusesopen
loop
data. Jacques calls the method"EFORSELS",
which stands for "IntegratedFrequency
domain
Observability
Range SpaceExtraction and Least Square parameter estimation algorithm"
Similarinnumerical robustness to Markov parameterbased algorithms, it has
manyofthesame strengths andweaknessesofPLED.
However,
thisiswherethesimilari tiesend. Threemaindifferences betweenPLEDandEFORSELS are:1)
Transferfunction data isusedby
EFORSELSinsteadoftimedomaindata.2)
A non-linearleast squares(LS)
optimization algorithmis usedto improvetheaccuracyoftheinitialmodel.
3)
A Balance Realization(BR)
model orderreduction method is integrated withtheabove2items.
Eachofthesefeaturesarediscussed inappendixG alongwithabrieftheoreticaloverview. For
brevity,
onlythekey
algorithm elements aretouchedonhere.Jacques points out that most SYSED methods produces an over-parameterized
model, where extra states are usedto reduce errors caused
by
slight errors in other state estimates. To correctthisshortcoming Jacquesiteratively
applies LS andBRto producethe
best,
smallest model (see Fig. 1.2-1). The benefit ofusing afrequency
domain approachis that this data representation is compact and is almost always measured
by
the controlsengineerregardlessifhe/sheisusingitforSYSEDornot.Measured 1
Response(
requency
Subspace-Base
Identification
Over-param eterized Model
' Reduced Order Model
Model Reduction
(BR)
ParameterEstimation
(LS)
j
High Order Model Updated Model
Error CostJ ^>
v Increased? S
Save B
M inal ID
)del
After the initial subspace
id,
the LS algorithm attempts to improve the model.Model order reductionis only slight so as not to cause the LS algorithm to diverge. A
loop
of model reduction and LS estimationis entered. Upon a measured increase inthecost
functional,
theloop
is exited. The BR algorithm used is the same one coded inMATLAB.
Beforethe model
tuning
procedure isimplemented,
a model synthesis method isneeded toprovide a"good"initialguessforthemodel
tuning
algorithm. Jacques soughtto
develop
atechniquewhich could operate ontransfer function datadirectly
without theneed for an inverse Fourier
transform,
and thus does not require uniformly space frequency data. He builtonthe "ORSE"
(Observability
Range SpaceExtraction)
algorithmdeveloped
by
Lui [9].Jacques'
algorithm places no requirement on the uniformity of the
frequency
points. This is a very important
feature,
because if one wishes to control a flexiblestructure over more than 2 decades of
frequency,
it
is best to vary the number offrequencypointsbasedonthe modaldensity. If not,to coverthe entire
frequency
axis withlinearly
spaced points of sufficientdensity
to capture the resonant peakswill requiretensofthousandsofpoints. Suchalargenumberiswastefuland will greatlyincreasethe com
putationalload.
In his
thesis,
Jacques shows how atransition from1-g (earth)
to a micro-g environment
(orbit)
can cause modalfrequency
shifts of as much as20%,
anddamping
changesofupto71%. Theseshiftswere seenusingtheMACE (MiddeckActive Control
Experiment)
hardware which flew on a Space Shuttle mission. These changes makeSYSED a near necessityfor space based systems which intend to maintain highperform
ance.
MACE was a 7
input,
5 output experiment forimproving
pointing accuracyby
using 3 axis reactionwheel, 2 piezoelectric
bending
actuators, and a2 axis gimbal for actuation. The 5 sensors were2 strain gauges, and 3 rate gyroscopes used tomeasure
iner-tial attitude ofthe assemble. All ofthis hardware was mounted on what is essentially a
flexible
2-Dbeam. As simple asthat sounds, theintegrated
unit has approximately 80dy
namic states.
Thefinalmodelidentifiedinfact had80 states, 7
inputs,
and 5 outputs. The fidelity
ofthe model is impressive to say the least and isfully
MEMO. Over thefrequency
rangeof0.1 Hzto 100
Hz,
modelerror waslessthan4% (based onl2
norm). Thisaccuracy is excellent, and it is important to note that it was achieved over 3 decades offre
quency.
Anothertestbedwas usedwhichis basedat
MIT,
called the SERCInterferometer.SERC stands for "Space
Engineering
ResearchCenter". Formed from a 3.5 meter tetrahedron,
each side is madefrom 13bay
aluminumtriangulartrusses. Thetestbed is complete with control sensors, actuators, anddisturbance sources. A 70 Hz low pass 4-pole
Bessel filterisappliedtowhitenoise,whichinturnis sentto the disturbance source. The
resultis a
richly
excited structurebetween 5 Hzand 500Hz. This structurehas
bothverylightly
(0.1%)
andfairly heavily (5%)
dampedresonances. Thebestfitmodel contain 236stateswith3 inputsand2outputs. Thetotal executiontime was 38minutesusinga
Cray
X-MP Thisisvery
impressive,
infact,
itisthemostimpressiveMEMO systemidentification technique knowntothe author. Theauthor feelsthat thistechniquewillbe "the one
2.0
Testbed Description
Thissectionisorganizedinto2briefsubsectionsinwhichthe testbed's
design,
fabrication,
andinstrumentation
arediscussed.
More detail is provided in Appendix H.Briefly,
thetestbedwas designedunderthe constraintsof1)
transportability,
2)
simplicity,3)
and use amaximum of3 inputs and 3 outputs.Further,
tokeep
costdown,
all actuatorsand sensors usedhadtobereadily availablein"surplus"quantities. This dictatedthe sensors as
being
accelerometers, andtheactuators as piezo-electric wafers.2. 1
Design Criterion
Transportability
was a significant design consideration because we wanted thetestbed to serve as a "show and tell"
piece, albeit an elaborate one.
Thus,
the weight ofany one piece could not exceed 100 lbs so as 1 person could lift each part. Height was
another constraint due to the desireto suspendthe testbedfrombungie cordsthat would
hang
from 8 footlong
2x4 studs. Based onthis,
we chose a maximumheight of4 feet.Tofitthrough
doors,
themaximumwidth wasfixed at30inches.Structures are often designedwith a truss type geometry. This is because truss
structures are staticallydeterminant. That
is,
onlytensionand compressionforces existinthe trussmembers for anyforceapplied at atrussjunctionorjoint. Thisdesigngenerally
results ina stiff structurefor itsweightbecausethetrussmembers are stronger intension
and compression than in bending. Two dimensional truss structures
(i.e.,
those whichhavewidthand
length,
but no appreciabledepth)
are simple to design andbuild,
butthey
have fewpractical uses. We decidedon a3-D (3
dimensional)
truss structureforourtest-bed.
2.2
Testbed
Design
Withthe overall design dictated
by
the design criterion specifiedin section2.1,
asketch ofthe structurewas made(Fig. 2.2-1).
UpperRigidBody
6SupportStruts
Bipodpair
RigidSupportBase
Fig.
2.2-1)
Rough SketchofStructure2.2.1
Geometry
Using
the rough sketch ofthetestbed,
we startedthe detail design processby
entering
the geometry ofFig. 2.2-1 using some initial-guess dimensions. As mentioned in section2.1,
themaximum horizontal dimension should be lessthan a door's width, thusthe supportbasewas set at a30 inch diameter. Threeinches onthe outerdiameterwere set asideto allow attachment pointsforthebungie cords. Thislefta24 inch diametercir cle inwhichtomountthe struts. The lowerstrut attachment points were placed approxi
To ease the geometry entry process into NASTRAN (discussed in Appendix
H),
the 3
bipod
pairs weretorise upandmeet,forming
avertical plane. Thevertices ofthesebipods
thendefines the cornersoftheUpper RigidBody. Ifyou work outthe geometry,this yields anUpper Rigid
Body
with 12 inchsides. To addrigidity
to this upperbody,
itwas madeintoa
delta
frame shapedlikeaprism,thusitsname was changedto the"UpperDeltaFrame"
or UDF. ArigidUDFwas
desired,
tokeep
thenumberof structuralreso nances withinthebandwidthofinterestto a minimum. Fig. 2.2.1-1 shows aline-drawing
ofthestructure's
top
view.Struts(form
vertical plane)
UpperDeltaFrame
(12 inch sides)
Fig. 2.2. 1-1
) Top
View Line DrawofStrutsandUpperDeltaFrameDetailed drawings ofthe structure are provided in Appendix C. Inspection of
thesedrawingswill revealthattheUDFis quite massive. Dueto theinherentstiffness of a
kinematicmountthat the strutsprovide,wewereforcedtomakeitas
heavy
as possibletoplacetherigid
body
modes oftheUDF vibratingonthe struts aslow as possible. Forthe samereasons,we usedthe thinnestwall aluminumtubing
availableforthe struts. Amores?\ Accelerometer
<^p^Sensors
(3)
Flexures
Upper Delta Frame (UDF, steel) 35 lbs
2piezo-patches
wired as 1actuator ,
/ (3total) '
6 Al. Tube Assemblies
(Struts, active)
^fSgr]
Al. Support Plate "^ 105 lbsFig.
2.2.1-2)
SideViewofTestbedNotice that the strutshave a square section placedin theirmid-section. As men
tioned in section
2.0,
the actuators were dictatedby
availability, which meant we had touse piezo-electricwafers. Thesewafersare a ceramic material,measuring 1.00Wx 2.00L
x 0.02T
inches,
with a chemical makeup ofLead-Zirconate-Titanate,
often called PZT.Although small,
they
are capable ofproducing significant forceswhena voltageis appliedto them
(they
aredescribed in detail in Appendix H2.3.2).Briefly,
awafer works as anactuator
by
contracting or expanding when a voltage is applied to the wafer's terminals.When attached to a structure with a stiffepoxy, the wafer will impart a shearing force
which, in
turn,
willcontract or expandtheunderlyingstructure. Used inthis manner,they
are often called"strainactuators", because
they
strainthesubstructure material.Being
ceramic andflat,
the wafers require a flatplace upon whichtobe epoxied.Since it
is
thestrutsthatareeffectivelythespring, itmakes senseto attach strain actuatorsto these stmts.
Thus,
the roundtubeswere outfittedwith a square section as showninFig. 2.2.1-3.
adapterisneededto
accomodatetheflatwafers Piezo-wafer
L
Cut-awayofthinwalled supporttube
Squareadapteris
epoxiedto the
supporttube
Fig.
2.2.1-3) Cut-away
ofSquare Actuator Adapter SectionofSupportTubesDueto the abrupt change in cross-sectional area, grid pointswillbeneeded at ei
therendofthe adapter section. Thesegrid points serve another purpose.
They
provide aplaceor mechanismto"attach"aforcewithintheNASTRANmodel. Actuatormodeling
is described inmoredetailinthenext section.
To
keep
theproblem within reach of anER&Dfunding level,
and achievable withina2to3 yeartime
frame,
we limitedthe numberof actuatorsto3,
andthenumber of sensorsto 3. Two ofthe
struts'
actuators were wiredtogether suchthat onecommandvolt
age would stretchthe two struts approximately an equal amount. We now
have
essentially
3 actuators whichnormally means we can onlycontrol thetip, tilt,
anddelta-Z
tionoftheUDF. This istruefor symmetric systems.
By intentionally
adding asymmetry,we can couple tip/tilt modes with delta-X/delta-Y modes. Even atheta-Z mode can be
coupled withtheother modes.
Asymmetry
isaddedby
makingeach strut out oftubeswith adifferent wallthickness. For example, considerifwehave primarilyatheta-Z mode. Asthe UDF twists, it
will
try
toimpart an equal expansion or compressionto the tubes.However,
becausethetubes have
different
stiffness', each tube will not extend or compress the same amount.Theresultwillbe some amountof
tip
ortilt,
which will be sensedby
the accelerometers.Thus,
3 sensors can see, and 3 actuators can effect all 6 DOF oftheUDF,
which is theeffect we were aftertomaketheproblemnon-trivial. Itshouldbenotedthatalthoughwe
can see 6
DOF,
we cannotfully
determinetheUDF's positionforall 6 modes. Forthis,
we need6 sensors.
Eachofthe actuator adapter sectionshavethesamedimensionssothat2tubescan
bewired togetherwithout
inducing
bending
inthe struts.Modeling
ofthe sensoris veryeasy; one simply requestsNASTRAN to present the
displacement,
velocity, or accelerationofthegrid pointnearestthesensor. The onlyrequirementthenistohavea grid point
atthelocationwhereyouwishto attach yoursensor. Inthisway, any sensor whichpro
duces a voltage proportional to the
displacement,
velocity, or acceleration ofa point onthestructure canbemodeled.
Before NASTRAN simulations can be runusing this model, wemust have away
ofmodelingthe actuatorin
NASTRAN,
which is discussed next. Unless the actuatortobe modeled canbe accurately represented as a force applied to a point onthe structure,
this taskis notastrivialasmodelingthe sensor. AppendixHgives providesthe
informa
3.0
Digital Controller
Functioning
both as the data acquisition system and the digital controller, we puttogetherwhat we hoped was the fastest PC-based system we could afford. High speed
was needed ifthe system was to ever function as a digital controller. Due to cost, we
were
limited
toPC-basedsolutionswhichseverelylimitedperformance.3. 1
System Description
Whenwe startedthis project, thegoal wastoperform
SYSED,
designacontroller,implement this controller, and
finally
test it showing that the closedloop
system couldadapttochangesinthestructure. WeconsideredSUNbased systemsbut quicklyrealized
that anysuch system would costwell over$20kwhichwas
financially
out of reach. ThisleftPCs. WithaPCslimited
floating
point computecapabilities, weknewthat the closedloop
system could not adaptto changes while theloop
was closed, sincethis would re quireCPUresources which wouldbetaxedtotheirlimitsrunningthecontroller.Thus,
wedecidedtouse a"batchadaptive"
approach. That
is,
a changewouldbe madeto thestructure(e.g.,
a mass wouldbeadded)whilethecontrollerwasrunning. The controller's performancewoulddrop
or possibly gounstable, afterwhichwe would stop the controller. Arevised model would be generated which accounts forthe mass, and arevised controller based onthe new model would be run, showing that performance was
maintainedoverall.
State-of-the-art inPCs in early 1992 was the Intel 80486 running at 66
MHz,
incorporating the next generation ISA
(Industry
StandardArchitecture,
8bit)
bus
calledEISA(Extended
ISA,
16bit).Running
at 8MHz,
theEISAbus'stheoreticburst speedis8 MHz * 2
bytes
=16 Mbytes/sec. Due tohandshake overhead, the actualthroughputiscloserto 6 Mbytes/sec.
Considering
that the datatobemoved amountsto 3 channels * 2bytes/ch.
= 6bytes
for inputs and 6 bytes for outputs, data transfer time should be ap
proximately2 u,sec.
I/Oboardswere purchased fromIntelligent
Instrumentation,
Inc. The input boardismodel PCI-20501C-1 andthe outputboard's model is PCI-20501C-2. Boththe input
and output boards are capable of1 MHzconversion rates. The above mentioned model
numbers are onlyforthe "carrier"boardswhich havethe EISAinterface
logic,
and otherbuffering
andtiming
circuitry. The PCI-20501C-1 also has a 1 MHz 12 bit A/D with a+ 10 Voltfullscale range. A DMA(Direct
Memory Access)
controlleris installedonbothcarrier boards which are capable of a 1 Mbyte/sec transfer rate.
Thus,
the actual maximumtransferrateis6fisecfor inputsand6u,secforoutputs.
Both carrier boards must be augmented with daughter cards which provide the
missing pieces. Forthe
inputs,
model PCI-20363-1 provides an 8 channel SimultaneousSample andHold
(SSH)
functiontoavoid skewbetweenchannels. Two channels ofD/Aconverters (12
bit)
per daughter card are contained on thePCI-20003M-2;
three cardswere purchased. Each D/Ahasa 10 Voltfullscale range.
Forsynchronization,both carrierboardsare connectedviaan
"I3Bus"
(Intelligent
Instrumentation Interface). This 32 pin bus allow the synchronization ofseveral carrier
boardsfordataacquisition systems withupto40channels.
Unfortunately,
bus data rates and A/D - D/A conversion times areonly halfthe
picture. TheCPUmustbe interruptedand fedthe data. This processdependsonthe op
erating system which is
(unfortunately)
MS-DOS.By
no means is MS-DOS a real-timeAlthough itwas thought that the system could handle a 5 kHz (200 usee) closed
loop
samplerate, subsequenttesting
proved thisassumption wrong. The timeline shownin Fig. 3.1-1 providesthereason.
A/D
Convert
1MHz
3ch.
DMA Data
Transfer, IMB/sec,6
bytes
DMAinterrupts
CPU- Endof
transfer- CPU
Responds
CPUrestart
DMAto
transferdatato
D/A
3 us 6 us -100us TOO \xs -209us
Fig.
3.1-1)
PartialTimelineonPC using MS-DOSIn Fig.
3.1-1,
there is already-209 usee oftime used, andthere are no computations showninthistimeline. Latertestsrevealedthat thefastesta
loop
couldberun was~3300Hz (300 u.sec). Nyquist forthis
loop
would be 1650 Hz. To achieve even 3kHz,
the controllerwould have tobe very simple (less than 5 states). With such a small con
troller running so slow, it is unlikelyto achieve significant performance gains (20 dB re
ductions)
inthe 100to200 Hzfrequency
bandwidth. Controllersof20 to 30 statesin sizerequire approximately 650
floating
point operations (FLOP). With aPentium computer,one can achieve about 2 MFLOPS (Million FLOP per
Second)
of sustained minimumspeed.
Thus,
another325 |isec are neededtoperform650FLOPs,
bringing
the total timeto 625 useeorFs= 1,600 Hz. A Nyquist of800 Hzwhich causes phase shift will
make obtaining anyperformance extremely difficult between 100 to200 Hz. The above
limitationsarewhyclosed
loop
analysis wasdoneonly insimulation.Data acquisition is not
limited
by
the need to start-stop-restart the DMA cycle.Once aDMAmap has beensetup, theDMAengine will doall ofthe necessary streaming
ofA/Ddata
into,
andD/Adataout ofthe appropriatememorylocations. Inthis situation,data speeds areonly
limited
by
the bus and/orDMAcontroller speed which are6 MB/secand 1
MB/sec,
respectively.Ironically,
unlike closedloop
control, system identification works best when thesample rateisas slow as possible. Thismaximizestheinformationcontent of each sample.
In essence, the slower sample rate combined with anti-alias
filtering
achieves a form ofdata compression
by
removingredundant or useless information.Typically,
we collectedtheSYSED datausinga 1,600 Hzsample rate.
3.2
Power Amps
Piezo-ceramics used as actuators are primarily capacitive. Our actuators have a
capacitance of0.048 uF,whichistoolarge formost Op-Ampstodrive.
Thus,
anypoweramp connectedto theactuatormustbestabilizedforcapacitive loadsto avoid
ringing
andoscillations.
Asearchwas made for off-the-self amplifiers which would drivesthese
loads
andmeetthe costbudget of$5k. The only onethat cameclose was produced
by
PCB,
but it cost$6k. Wedecidedto designandbuild our own. Thisprovedtobemore challengingthan it first looked. In the end, we spent about $6k onthe
design, build,
and parts purThepowerampschematicisprovidedin appendixE. You'llnoticethatis centers
aroundtheAPEXPA-85Apower op-amp. Avendor surveyshowedthat APEXwasone
ofthe
industry
leaders,
andtheir"tech. notes"were excellent. We haveusedBurr-Brown
powerop-ampsinthepast,but have foundthem tobenoisy.
The PA-85 iscapable of a 200
Vpk
and 200 mApk output, or 40 Watts peak. Itsopen
loop
outputimpedance
is 50Q,
andis predominantlyresistive. Wechose a voltagegain oflOxwhicheffectively setsthemaximum output voltage to 100
V,
sincethe maximum voltagethat theD/Ascan produceis10 Vpk.
Doing
this protectsthePZTwafersforexceedingitsmaximum safe voltage of100V.
Viewing
the schematic in appendixE,
you'll notice the input is protected fromover voltage
by
2 sets ofEN4 148-1 diodes. Twodiodes
are used to allowthe inputvoltage to swing 1.4 Vbefore clamping. Thislevel iswell within the safe input
level,
but ishighenough to provide sufficient "over drive" to achieve the maximum slew rate ofthe
PA-85. Also