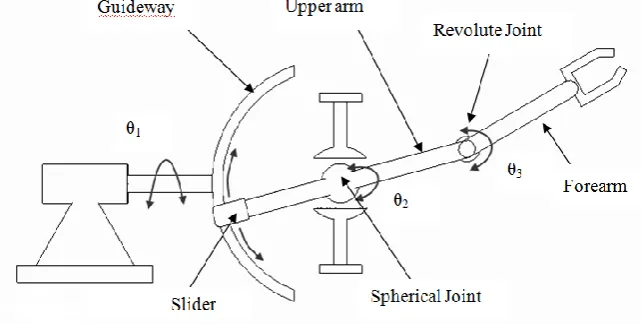
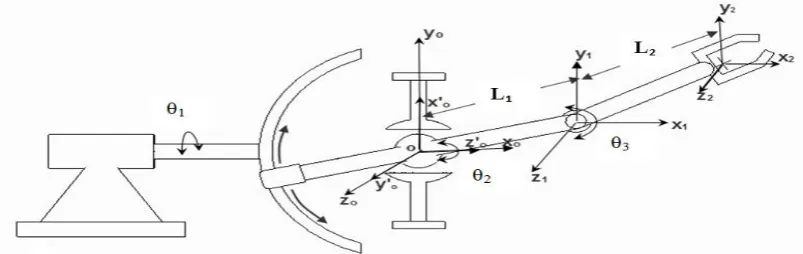
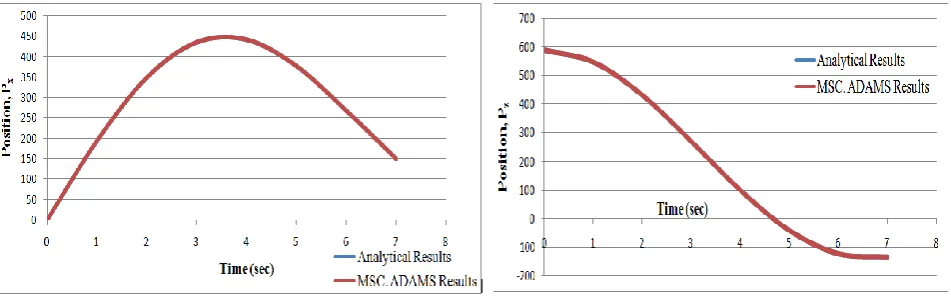
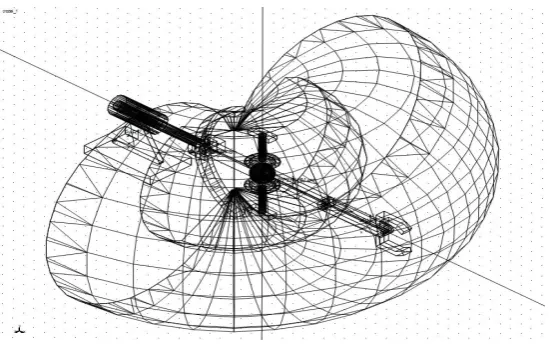
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
Full text
Figure
Related documents
-Young People (CNQ-YP), a measure designed to cap- ture the perceived needs of AYA cancer patients and survivors. Specifically, the aims were to: 1) establish face and content
We implemented a multimodal HIV testing intervention at 15 VA medical centers in three regions. At all sites, a facility-specific study team was established that consisted of
Even though implementation of an EnMS can deliver both energy savings as well as a range of other non-energy benefits (up to 2.5 times the value of the energy demand reduction),
Manufacturing and Mining had high survival in 20 years and low survival in 18 years, meaning that more number of businesses opened rather than closed in 20 out of the 38 years,
Erik Johnson will be recalled from Class AAA Charlotte on Monday to pitch the second game of a doubleheader against the Indians, the White Sox announced
• Used for running or stopping the inverter, setting or referencing parameters, and monitoring output frequency, output current, or similar items through CANopen communication with
In addition national governmental bodies need to increase their support for local organisations, especially through better information provision, partnership brokerage, funding for
