ABSTRACT
HAN, XU. Structural Breaks, Model Selection, and Overidentification in Dynamic Factor Models. (Under the direction of Dr. Atsushi Inoue.)
The first chapter develops tests for structural breaks of factor loadings in dynamic factor
models. We focus on the joint null hypothesis that all factor loadings are constant over time.
Because the number of factor loading parameters goes to infinity as the sample size grows, the
conventional test cannot be used. Based on the fact that the estimated factors will demonstrate
a higher dimension under the alternative hypothesis than under the null, we reduce the
infinite-dimensional problem into a finite-infinite-dimensional one and our statistic compares the pre- and
post-break subsample second moments of estimated factors. Our test is consistent under the
alternative hypothesis in which a fraction of or all factor loadings have structural changes. The
Monte Carlo results show that our test has good finite-sample size and power. In an empirical
illustration, we find some evidence of structural break in the factor loadings in early 1980s in
the United States.
The second chapter develops methods to estimate the number of factors in dynamic factor
models where the idiosyncratic shocks have potentially strong correlation in the cross-sectional
dimension. Existing methods, such as Bai and Ng (2002) and Onatski (2010), assume that the
cross-sectional correlation in the idiosyncratic shocks is weak. Violation of such weak correlation
assumption can lead to inconsistent estimates of the number of factors. This chapter establishes
a data dependent estimator that is consistent whether the idiosyncratic shocks are weakly
or strongly correlated in the cross-sectional dimension. Monte Carlo results show that our
estimator has similar performance to existing methods in the case where the conventional weak
correlation assumption is satisfied. When the idiosyncratic shocks have strong cross-sectional
correlation, our estimator outperforms the existing methods.
This chapter develops tests for overidentifying restrictions in Factor-Augmented Vector
restrictions as the number of cross sections goes to infinity. Our focus is to test the joint null
hypothesis that all the restrictions are satisfied. Conventional tests cannot be used due to the
large dimension. We transform the infinite-dimensional problem into a finite-dimensional one
by combining the individual statistics across the cross section dimension. We find the limit
distribution of our joint test statistic under the null hypothesis and prove that it is
consis-tent against the alternative that a fraction of or all identifying restrictions are violated. The
Monte Carlo results show that the joint test statistic has good finite-sample size and power.
We implement our tests to an updated version of Stock and Watson’s (2005) data set. The
proposed test rejects the null hypotheses that the number of fast shocks is two or more, but
does not reject the null that there is only one fast shock, which is the monetary policy shock.
This result is further confirmed by the impulse responses of major macroeconomic variables to
the monetary policy shock: the impulse responses based on one fast shock are generally more
economically plausible than those based on two or more fast shocks; and the price puzzle is
either considerably reduced or entirely solved for all price indexes when only one fast shock is
Structural Breaks, Model Selection, and Overidentification in Dynamic Factor Models
by Xu Han
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Economics
Raleigh, North Carolina
2012
APPROVED BY:
________________________ ________________________
Atsushi Inoue Mehmet Caner
Chair of Advisory Committee
________________________ ________________________
BIOGRAPHY
Xu Han is a PhD candidate at North Carolina State University. His main research area
is econometric theory and applied econometrics with focus on high dimensional factor models,
forecasting, and model and variable selection. He is also interested in empirical macro/monetary
TABLE OF CONTENTS
LIST OF TABLES . . . vi
LIST OF FIGURES . . . vii
CHAPTER 1 TESTS FOR PARAMETER INSTABILITY IN DYNAMIC FACTOR MODELS . . . 1
1.1 Introduction . . . 1
1.2 A Structural Break Test in Factor Loadings . . . 4
1.2.1 Factor Models and the Null Hypothesis of Interest . . . 4
1.2.2 The Test Statistic . . . 5
1.2.3 Asymptotics under the Null Hypothesis . . . 7
1.2.4 Asymptotics under the Alternative Hypothesis . . . 14
1.3 Monte Carlo Simulations . . . 19
1.3.1 Testing Breaks with Known Break Date . . . 21
1.3.2 Testing Breaks with Unknown Break Date . . . 23
1.3.3 Power Comparison with the Chen, Dolado, and Gonzalo’s (2011) Test . . 24
1.4 Empirical Application . . . 25
1.5 Conclusions . . . 29
CHAPTER 2 DETERMINING THE NUMBER OF FACTORS WITH PO-TENTIALLY STRONG CROSS-SECTIONAL CORRELATION IN IDIOSYNCRATIC SHOCKS . . . 45
2.1 Introduction . . . 45
2.2 Factor Models with Weak and Strong Correlation in Idiosyncratic Shocks . . . . 51
2.3 Estimating the Number of Factors . . . 57
2.3.1 Estimating r Using a Data Dependent Penalty Term . . . 58
2.5 Empirical Applications . . . 67
2.6 Conclusions . . . 69
Appendix 3 TESTS FOR OVERIDENTIFYING RESTRICATIONS IN FAC-TOR AUGMENTED VAR MODELS . . . 76
3.1 Introduction . . . 76
3.2 The FAVAR Models and Contemporaneous Timing Restrictions . . . 81
3.2.1 The FAVAR Models . . . 81
3.2.2 Contemporaneous Timing Restrictions in FAVAR . . . 83
3.3 Testing the Overidentifying Restrictions . . . 85
3.3.1 The Statistics . . . 90
3.3.2 Asymptotics under the Null Hypothesis . . . 91
3.3.3 Asymptotics under the Alternative Hypothesis . . . 95
3.4 Monte Carlo Simulations . . . 97
3.5 Empirical Results . . . 102
3.5.1 Testing the Overidentifying Restrictions . . . 103
3.5.2 Impulses Responses to the Monetary Policy Shock . . . 105
3.6 Conclusions . . . 108
REFERENCES . . . .117
APPENDICES . . . .122
Appendix A Proofs of the Results in Chapter 1 . . . .123
Proofs of Results in Section 1.2.3 . . . 123
Proofs of the Results in Section 1.2.4 . . . 148
Appendix B Proof of Results in Chapter 2 . . . .153
Proof of Theorem 2 . . . 153
Proof of Theorem 3 . . . 162
Proof of Theorem 4 . . . 164
Preliminary Conditions for Assumption 7 . . . 192
Appendix C Proof of Results in Chapter 3 . . . .195
Proof of Preliminary Lemmas under the Null Hypothesis . . . 195
Lemmas on ˆF and ˆF . . . 195
Lemmas on ˆζS under the Null Hypothesis . . . 203
Lemmas on ˆζF under the Null Hypothesis . . . 222
Proof of Theorem 1 . . . 230
Proof of Theorem 2 . . . 238
LIST OF TABLES
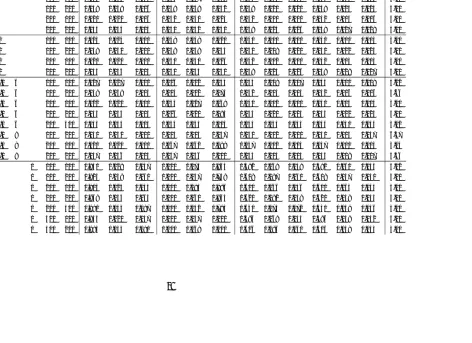
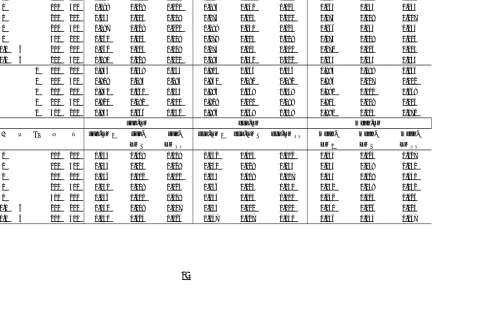
Table 1.1 size of Structural Break Tests with Known Break Date . . . 31
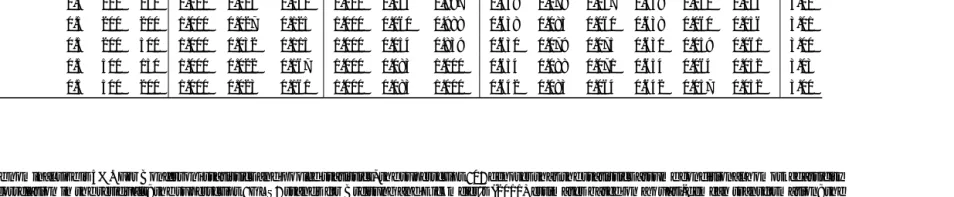
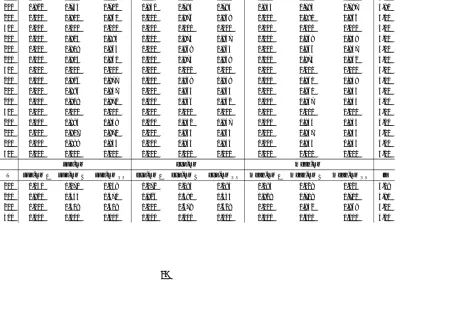
Table 1.2 Power against a Break at T /2 under DGP A1 . . . 33
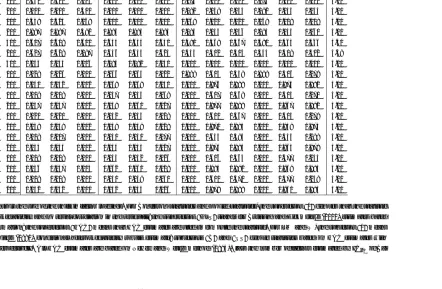
Table 1.3 Power against a Break at T /2 under DGP A2 . . . 34
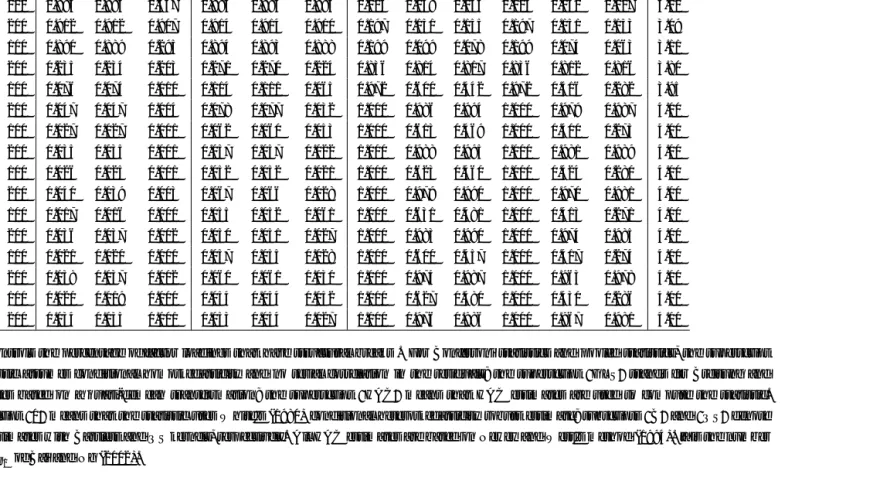
Table 1.4 Size of Structural Break Tests with Unknown Break Date . . . 35
Table 1.5 Power against Unknown Break Date under DGP A1 . . . 37
Table 1.6 Power against Unknown Break Date under DGP A2 . . . 39
Table 1.7 Local Power with Known Break Date, N = 500, T = 500, r = 3 . . . 41
Table 1.8 Local Power with Unknown Break Date, N = 500, T = 500, r = 3 . . . 41
Table 1.9 Numbers of Factors in the Full Sample and Subsamples . . . 42
Table 1.10 Tests for Structural Breaks in Factor Loadings . . . 42
Table 1.11 Tests for Structural Breaks in Factor Dynamics . . . 44
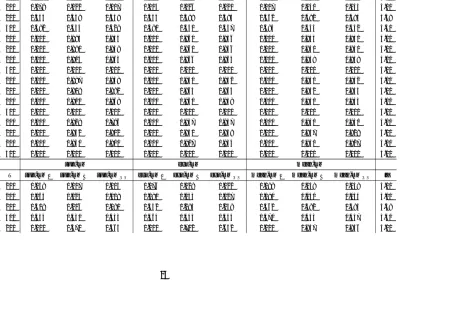
Table 2.1 Means and modes of different estimators under DGP1 . . . 71
Table 2.2 Means and modes of different estimators under DGP2: subcase (1) . . . . 72
Table 2.3 Means and modes of different estimators under DGP2: subcase (2) . . . . 73
Table 2.4 Robustness of different estimators to the choice ofkmax . . . 74
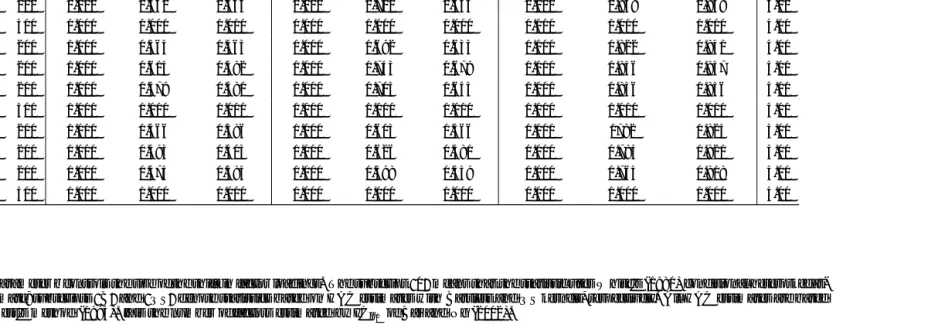
Table 3.1 Size of Tests for the Overidentifying Restrictions under DGP N1 . . . 110
Table 3.2 Size of Tests for the Overidentifying Restrictions under DGP N2 . . . 111
Table 3.3 Power of Tests for the Overidentifying Restrictions under DGP A1 . . . 112
Table 3.4 Power of Tests for the Overidentifying Restrictions under DGP A2 . . . 113
LIST OF FIGURES
Figure 1.1 LMQS and WQS Statistics at different potential break points . . . 43
Figure 3.1 Impulse Responses of Macroeconomic Variables to a Unity Variance
Con-tractionary Monetary Policy Shock . . . 115
Figure 3.2 The Impulse Responses (in Percentage) of Price Indexes to a Unity
1
TESTS FOR PARAMETER INSTABILITY IN DYNAMIC
FACTOR MODELS
1.1 Introduction
Dynamic factor models have become popular in the recent macroeconometrics literature
be-cause a few factors can often explain a substantial amount of variations of many
macroeco-nomic time series. For example, they have been successfully used in forecasting (Stock and
Watson, 2002a), factor augmented vector autoregressive (FAVAR) models (Bernanke, Bivin
and Ellasz, 2005; Stock and Watson, 2005) and DSGE models (Boivin and Giannoni, 2006).
While most of these applications implicitly assume that the factor loadings in dynamic factor
models are time-invariant, there are strong evidence of structural instability in macroeconomic
time series (Stock and Watson, 1996). If the common factors are driven by some structural
shocks, it is possible that macroeconomic variables react to these structural shocks differently
during different sample periods, resulting in time-varying factor loadings. For example,
Eick-meier, Lemke and Marcellino (2011) consider time-varying FAVAR models to take into account
changes in the monetary transmission mechanism. In such cases, the dynamic factor models
may perform poorly or give misleading results. For example, Banerjee and Marcellino (2008)
provide simulation evidence that the performance of forecasts based on dynamic factor models
will be significantly worse off if the structural breaks in factor loading are ignored. While the
estimated factors still consistently span the original factor space if the size of breaks is local
to zero (Stock and Watson, 2002b), such results do not hold when the size of breaks is large.
Stock and Watson (2009) show that the coefficients on factors in a forecasting regression are
determined by factor loadings and the dynamic of factors, and their empirical results indicate
that factors estimated using the full sample can be still used in the forecast regression as long as
coefficients on the factors are allowed to be time-varying. In other words, the knowledge about
the existence of structural breaks of factor loadings and break dates are essential for forecasting
In this chapter, we consider testing the joint null hypothesis that factor loadings are constant
over time against the alternative that a non-negligible fraction of or all factor loadings are not.
We are interested in the joint null hypothesis rather than the null hypothesis that a specific
individual factor loading is constant over time because it is the joint null hypothesis under
which one can estimate the factors consistently. Conventional tests of structural change, such
as Andrews (1993), are designed to deal with finitely many parameters and cannot be used to
test our null hypothesis that involves parameters whose number goes to infinity as the sample
size grows. Directly extending the conventional test to our setup is challenging for two reasons.
First, one needs to estimate an infinite dimensional covariance matrix and its inverse. This
brings several technical difficulties: (1) the norm of the difference between the estimated and
true covariance matrices can be very large even if each entry of the estimated matrix converges
in probability; (2) taking the inverse of a high dimensional matrix will amplify the estimation
error dramatically and lead to very poor results (Ledoit and Wolf, 2004); and (3) the number
of time periods,T, can be even smaller than the dimension of the estimated covariance matrix,
so the covariance matrix can be singular. Second, because the degree of freedom also goes to
infinity, the limit distribution of such test statistics, even if it is well-defined, is likely to be
nonstandard.
To the best of our knowledge there are three existing tests for structural instability of factor
loadings. One is proposed by Stock and Watson (2009) (henceforth SW), who regressed each
variable on the estimated factors and implemented Chow-test for each of these regressions.
Using a post-war quarterly data set for the United States, they found a substantial amount of
instability in factor loadings: 41% (23%) of these Chow tests reject at the 5% (1%) significance
level. This method cannot control the overall type I error for testing our joint null hypothesis
and it may overstate the parameter instability in factor loadings. The other test is proposed
by Breitung and Eickmeier (2011) (henceforth BE). They constructed a joint test that controls
the overall type I error as well as tests for individual factor loadings allowing for an unknown
statistics for each of the factor loadings. They require that the idiosyncratic shocks be
cross-sectionally independent, however. This is more restrictive than Bai and Ng’s (2002) setup for
approximate factor models where idiosyncratic shocks are allowed to have weak cross-sectional
correlation. Also, their joint test is severely oversized in the presence of serial correlations in
the idiosyncratic shocks when the HAC covariance matrix estimator is used. 1
This chapter proposes new joint tests that circumvent these issues and contributes in the
following ways: First, we reduce the infinite-dimensional problem to a finite-dimensional one.
Because the principal component analysis implicitly imposes the restriction that the factor
loadings are time-invariant, the estimated factors will demonstrate a higher dimension under
the alternative hypothesis than under the null. Based on this fact, our statistic compares the
pre- and post-break subsample second moments of estimated factors. We allow for unknown
break dates and our statistic has the same asymptotic distribution as the conventional supreme
Wald test proposed by Andrews (1993). Second, we follow Bai and Ng’s (2002) approximate
factor setup in which serial, cross-sectional correlation and heteroskedascitity are allowed in the
idiosyncratic shocks, and the knowledge about the form of such correlations and
heteroskedas-ticity is not required to implement our test. This is more general than BE’s framework which
requires cross-sectional independence and AR(p) assumption on the idiosyncratic shocks. Third,
the number of factors are unknown and to be determined. To implement the test in this
chap-ter, the number of factors is estimated using the information criteria (IC) proposed by Bai and
Ng (2002). Both SW and BE point out that the number of factors will be enlarged when there
are structural breaks in factor loadings, BE remark that using IC to determine the number of
factors can reduce the power of each individual LM statistic. However, we show that Bai and
Ng’s IC remain consistent for estimating the enlarged dimension under the one-time break
al-1In the working paper version, they provide simulation evidence that the effective size of their test can be
ternative and that this helps our test statistic to distinguish the null and alternative hypotheses,
i.e., it improves rather than reduces the power of our test. We find that if the estimated factors
are divided into pre- and post-break subsamples, then the sample second moments of estimated
factors in both subsamples will converge to the same limit under the null and different limits
under the alternative. Finally, we establish the regularity conditions on N, T and bandwidth
parameters for different kernel functions so that HAC estimators are applicable for our test
statistics. The technical details will be discussed in section 1.2.
In this chapter, all limits are taken as both N, T → ∞ simultaneously. ∥ · ∥ denotes the Euclidean norm of a vector or matrix, →p denotes convergence in probability, →d denotes convergence in distribution,⇒denotes weak convergence of stochastic processes, and⌊·⌋ is the integer part operator. Vech(·) is equal to the column-wise vectorization of a square matrix with the upper triangular excluded.
The remainder of this chapter is organized as follows: Section 1.2 proposes a structural
break test for factor loadings, and the asymptotic properties are established under the null and
alternative hypotheses. Section 1.3 shows Monte Carlo results under various data generating
processes (DGPs). Section 1.4 applies our tests to post-war quarterly macroeconomic time
series for the United States. We find some evidence that factor loadings changed in early 1980s.
Section 1.5 concludes. Proofs are relegated to appendices.
1.2 A Structural Break Test in Factor Loadings
1.2.1 Factor Models and the Null Hypothesis of Interest
Let xit denote the observation for the ith cross section and at period t for i= 1,2, ..., N and
t = 1,2, ..., T. Suppose that xit has r common factors and has the following static factor
representation:
xit =
ft′λi1+eit fort = 1,2, ...,⌊πT⌋
ft′λi2+eit fort = ⌊πT⌋+ 1,⌊πT⌋+ 2, ..., T
whereft is ar×1 vector of common factors at periodt,λi is ar×1 vector of factor loadings for the ith cross section, and eit is the idiosyncratic shock for cross section i at period t and
π∈(0,1). In the matrix notation
X =
F1Λ
′
1
F2Λ′2
+e (1.2)
whereX = (X1, X2, ..., XN), Xi = (xi1, xi2, ..., xiT)′,F1 = (f1, f2, ..., f⌊πT⌋))′,F2= (f⌊πT⌋+1,
f⌊πT⌋+2, ..., fT)′, Λj = (λ1j, λ2j, ..., λN j)′,e= (e1, e2, ..., eN), andei= (ei1, ei2, ..., eiT)′. We are interested in testing the null hypothesis of no break in the factor loadings:
H0 : λi1 =λi2for∀ (1.3)
The test of Breitung and Eickmeier (2011) is designed to test the null hypothesis
HBE,0: λi1 = λi2for giveni (1.4)
While their test is useful when one is interested in a specific factor loading, it is (1.3) under
which factors are consistently estimated. If their test for (1.4) is applied to test (1.3), the null
hypothesis (1.3) will be rejected with probability approaching one because the test is applied
to factor loadings whose number goes to infinity. Breitung and Eickmeier (2011) also suggest a
pooled LM test for testing (1.3) but their pooled test requires that the idiosyncratic shocks eit
are uncorrelated acrossi and thus rules out approximate factor structures. Below we propose
a test for the null hypothesis (1.3) that is valid under more general assumptions.
1.2.2 The Test Statistic
We consider a statistic that tests the null hypothesis H0: all factor loadings are constant over
time against the alternative hypothesis H1: αN many variables have structural changes in
our test statistic, consider a simple example. Under the null hypothesis note that (1.2) can be
rewritten in the following form:
X=
F1
F2
Λ′+e
where F1 is the pre-break subsample of F and F2 is the post-break subsample of F. If the
fourth moment offt is time-invariant, a Wald statistic comparingF1′F1/⌊π∗T⌋andF2′F21/(T−
⌊π∗T⌋) should converge to a chi-square distributed random variable under the null hypothesis. Under the alternative hypothesis, (1.2) will have time-varying factor loadings, but conventional
principal component analysis (PCA) implicitly assumes that factor loadings are constant over
time. This means that we estimate an equivalent factor model with time-invariant factor
loadings:
X =
F1 0⌊π∗T×r⌋
0⌊(1−π∗)T×r⌋ F2
Θ′+e
where Θ ≡[Λ1...Λ2], and Λ1 and Λ2 are pre- and post-break factor loadings, respectively. Let
G1 ≡[F1...0],G2 ≡[0...F2], andG≡[G′1...G′2]′. Note that
1 π∗TG
′
1G1 =
1
π∗TF1′F1 0r×r 0r×r 0r×r
and
1 (1−π∗)TG
′
2G2 =
0r×r 0r×r
0r×r (1−π1∗)TF2′F2
have different limits, so the Wald test that compares the second moments ofG1 and G2 rejects
the null hypothesis under the alternative. This example shows that testing the structural
breaks in factor loadings is equivalent to testing the structural changes in the subsample second
moments of factors. Using this fact, we can reduce the indimensional problem to a
finite-dimensional one.
of ˆftfˆt′. Let A(π,Fˆ) ≡ vech
(√
T
(
1
⌊πT⌋
∑⌊πT⌋
t=1 fˆtfˆt′−T−⌊1πT⌋
∑T
t=⌊πT⌋+1fˆtfˆt′
))
. S(π,ˆ Fˆ) and
˜
S(π,F) denote unrestricted and restricted estimates of the long-run covariance matrix ofˆ
A(π,Fˆ), respectively, and will be defined more precisely in the next subsection. We define
two test statistics by
sup π∈[π1,π2]
WT(π,Fˆ) ≡ sup π∈[π1,π2]
A(π,Fˆ)′S(π,ˆ Fˆ)−1A(π,Fˆ), (1.5)
sup π∈[π1,π2]
LMT(π,Fˆ) ≡ sup π∈[π1,π2]
A(π,Fˆ)′S(π,˜ Fˆ)−1A(π,Fˆ), (1.6)
whereWT(π,F) andˆ LMT(π,Fˆ) are Wald and LM-like statistics for testing whether the
subsam-ple means of ˆftfˆt′ are equal or not at a predetermined break dateπT. The next two subsections will discuss the detailed properties of the proposed test statistics.
1.2.3 Asymptotics under the Null Hypothesis
We make the following assumptions under the null hypothesis.
Assumption 1: E∥ft∥4 < ∞, E(ftft′) = ΣF and T−1
∑T
t=1ftft′ → ΣF as T → ∞ for some
positive definite matrix ΣF.
Assumption 2: ∥λi∥ ≤λ <¯ ∞, ∥Λ′Λ/N −ΣΛ∥ →0 for some r×r positive definite matrix ΣΛ,
and ∥Λ′Λ/N −ΣΛ∥ ≤O
(
1
√
N
)
.
Assumption 3: There exists a positive constantM <∞ such that for all N and T,
(a)E(eit) = 0,E|eit|8 ≤M for all iand t.
(b)E(e′set/N) =E(N−1∑Ni=1eiseit) =γN(s, t),|γN(s, s)| ≤M for all s, andT−1∑Ts=1∑Tt=1
|γN(s, t)| ≤M.
(c)E(eitejt) =τij,twith|τij,t| ≤ |τij|for someτijand for all t. In addition,N−1∑Ni=1∑Nj=1|τij| ≤ M.
(d)E(eitejs) =τij,ts, and (N T)−1
∑N
i=1
∑N
j=1
∑T
s=1
∑T
t=1|τij,ts| ≤M. (e) for every (t, s),EN−1/2∑Ni=1[eiseit−E(eiseit)]
4
Assumption 4: E
(
1
N
∑N
i=1√1T
∑T
t=1fteit 2)
≤M.
Assumption 5: There exists M < ∞ such that for all T and N, and for every t ≤ T and for
everyi≤N:
(a)∑Ts=1|γN(s, t)| ≤M. (b)∑Nk=1|τki| ≤M.
Assumption 6: There exists anM <∞ such that for all N and T:
(a) for each t, E√1
N T
∑T s=1
∑N
k=1fs[eksekt−E(eksekt)]
2
≤M. (b)E√1
N T
∑T t=1
∑N
k=1ftλ′kekt≤M (c) for each t, E√1
N
∑N
i=1λieit 4
≤M.
Assumption 7: The eigenvalues of r×r matrix (ΣΛΣF) are distinct.
Assumption 8: For any constantsπ1 and π2 that satisfy 0< π1 ≤π2 <1,
(a) supπ∈[π1,π2]√1
N T
∑⌊πT⌋ t=1
∑N
k=1ftλ′kekt
2
=Op(1) and supπ∈[π1,π2]∥ 1
√
N T
∑T
t=⌊πT⌋+1
∑N k=1
ftλ′kekt∥2=Op(1). (b) supπ∈[π1,π2] √T
⌊πT⌋
∑⌊πT⌋
t=1 (ftft′−ΣF)=Op(1) and supπ∈[π1,π2]∥
√
T T−⌊πT⌋
∑T
t=⌊πT⌋+1(ftft′− ΣF)∥=Op(1).
These assumptions are either from or slight modifications of those in Bai (2003). Assumption
1 is the same as Assumption A in Bai (2003) except that it requires that the second moment of
ft has to be constant over time. When there is a change in the stochastic process for factors,
this assumption is violated and our test may reject the null hypothesis even if factor loadings are
time-invariant. Given the results of Bai (2003), however, this assumption that there is no change
in the process of factors (e.g., autoregressive parameters and innovation variances) is testable
using conventional tests of structural change under our null hypothesis. The Assumption 2 is
different from Assumption B of Bai (2003) in that it specifies the convergence speed of Λ′Λ/N.2
2
Assumptions 3 - 5 and 7 exactly follow from Bai’s (2003) setup. Assumption 3 allows weak serial
and cross-sectional dependence in the idiosyncratic shocks, and Assumption 5 is a strengthened
version of Assumption 3. Assumptions 3 and 5 also allow heterogeneity in time and cross
section dimensions. Thus, this chapter allows weaker assumptions on idiosyncratic shocks than
BE who assume that the idiosyncratic shocks are cross-sectional independent and follow AR(p)
processes. Parts (a) and (b) of Assumption 6 are the same as Assumptions F1 and F2 of Bai
(2003). Assumption 6(c) is slightly stronger than the assumption of Bai (2003) which only
requires the second moment exists, but the asymptotic normal distribution of √1
N
∑N i=1λieit
and √1
T
∑T
t=1fteit in Bai (2003) is not necessary in this chapter. Assumption 8 states that the
terms in∥.∥areOp(1) uniformly inπ. Note that all summands have zero means, so Assumption 8 is an implication of the conventional functional central limit theorem.
Before discussing the properties of our test statistic, it is useful to describe some useful notations
and existing results. Let VN T be the r×r diagonal matrix of the first r largest eigenvalues of (1/T N)XX′ in decreasing order. Lemma A3 of Bai (2003) shows that VN T converges to V in probability, where V is the diagonal matrix consisting of the eigenvalues of Σ
1 2 ΛΣFΣ
1 2 Λ
in descending order. Let Υ denote Σ
1 2 ΛΣFΣ
1 2
Λ’s eigenvectors that corresponds to V such that
Υ′Υ =Ir. Recall that the estimated factor matrix ˆF is
√
T times eigenvectors corresponding to
the r largest eigenvalues ofXX′. LetH= (Λ′Λ/N)(F′F /T)Vˆ N T−1 be anr×rmatrix. Proposition 1 of Bai (2003) show that F′F /Tˆ converges to Σ−
1 2
Λ ΥV
1
2. Thus, it follows thatH→p Σ 1 2 ΛΥV−
1 2.
LetH0 ≡plimT ,N→∞H , so it is obvious that
E(H0′ftft′H0) =H0′ΣFH0=Ir (1.7)
which is implied by the definition ofH0and the fact thatV− 1 2Υ′Σ
1 2 ΛΣFΣ
1 2 ΛΥV−
1 2 =V−
1 2V V−
1 2 =
Ir.
Equation (1.7) provides a bridge connecting the statistics using estimated factors and true
factors. Let A(π, F H0) ≡ vech
(√
T(⌊πT1 ⌋∑⌊t=1πT⌋H0′ftft′H0−T−⌊1πT⌋
∑T
t=⌊πT⌋+1H0′ftft′H0
))
.
Under Assumption 1 that E(ftft′) = ΣF for∀t, the conventional central limit theorem implies thatA(π, F H0) converges in distribution to some normally distributed random variable. and a
Wald statistic or supreme Wald statistic can be constructed based onA(π, F H0) and its sample
variance. Although bothF and H0 are not observable, ˆF is a consistent estimate ofF H (see
Bai, 2003) and H→p H0, so replacingH0′ftby ˆft is a potential solution.
Theorem 1: Under Assumptions 1 - 8, if
√
T
N →0 asN, T → ∞, then
sup π∈[π1,π2]
A(π,Fˆ)−A(π, F H0)
p
→0
Theorem 1 shows that the difference between A(π,F) andˆ A(π, F H0) is op(1) uniformly in π,
so A(π,Fˆ) and A(π, F H0) will have the same asymptotic distribution. To construct a Wald
statistic, we also need the sample variance ofA(π, F H0). Let
Ω≡ lim T→∞Var
(
vech
(
1
√
T
( T ∑
t=1
H0′ftft′H0−Ir
)))
Let ˆΩ1(π, F H0) and ˆΩ2(π, F H0) be consistent estimates of Ω, where the subscript m = 1,2
denotes the pre- and post-break subsamples, respectively,π denotes the break date that splits
the sample, andF H0means that the sample variance is computed using unobservedft′H0. Since
the common factors ft are likely to be serially correlated, we consider the following estimates
for the sample variances:
ˆ
Ω1(π, F H0) =
⌊πT∑⌋−1
j=0
k
(
j S⌊πT⌋
)
ˆ
Γ1,j(π, F H0) +
⌊πT∑⌋−1
j=1
k
(
j S⌊πT⌋
)
ˆ
Γ1,j(π, F H0)′
ˆ
Ω2(π, F H0) =
T−⌊∑πT⌋−1
j=0
k
(
j ST−⌊πT⌋
)
ˆ
Γ2,j(π, F H0) +
T−⌊∑πT⌋−1
j=1
k
(
j ST−⌊πT⌋
)
ˆ
wherek(·) is a real-valued kernel
ˆ
Γ1,j(π, F H0) =
1
⌊πT⌋
⌊∑πT⌋
t=j+1
vech(H0′ftft′H0−Ir)vech(H0′ft−jft′−jH0−Ir)′
ˆ
Γ2,j(π, F H0) =
1 T − ⌊πT⌋
T
∑
t=j+⌊πT⌋+1
vech(H0′ftft′H0−Ir)vech(H0′ft−jft′−jH0−Ir)′(1.9)
Alternatively, we can use all data to estimate ˆΩ1(π, F H0) and ˆΩ2(π, F H0),
ˆ
Ω(F H0) =
T∑−1
j=0
k
(
j ST
)
ˆ
Γj(F H0) +
T∑−1
j=1
k
(
j ST
)
ˆ
Γj(F H0)′ (1.10)
where
ˆ
Γj(F H0) =
1 T
T
∑
t=j+1
vech(H0′ftft′H0−Ir)vech(H0′ft−jft′−jH0−Ir)′ (1.11)
In this paper, we focus our analysis on three commonly used kernels that always give positive
definite estimates: Bartlett, Parzen and Quadratic Spectral (henceforth QS).S is a band-width
parameter, and its subscript denotes the size of the sample (or subsample) that is used to
estimate the long-run variance. Let ˆS(π, F H0)≡ 1πΩˆ1(π, F H0) +1−1πΩˆ2(π, F H0), so ˆS(π, F H0)
is a consistent estimate of the asymptotic variance of A(π, F H0). One can also construct
the restricted estimate ˜S(π, F H0) using ˆΩ(F H0), i.e. ˜S(π, F H0) ≡ π1Ω(F Hˆ 0) + 1−1πΩ(F Hˆ 0).
Similar toA(π, F H0), ˆΩm(π, F H0), ˆΓm,j(π, F H0), form= 1,2, ˆΩ(F H0), ˆΓj(F H0), ˆS(π, F H0)
and ˜S(π, F H0) are computed using infeasible data ft′H0. We define ˆΩm(π,Fˆ), ˆΓm,j(π,Fˆ), for m = 1,2, ˆΩ( ˆF), ˆΓj( ˆF), ˆS(π,Fˆ) and ˜S(π,Fˆ) as the feasible analogs computed using the
estimated regressors ˆF.
Condition 1: (a) The Bartlett kernel is used to estimate ˆS(π, F H0), ˆS(π,F), ˜ˆ S(π, F H0) and
˜
S(π,F), and there exists a constantˆ K > 0 such that ST, S⌊πT⌋, and ST−⌊πT⌋ are less than KT13 for all π∈[π1, π2]⊂(0,1); and (b) T
2 3
N →0 as N, T → ∞.
˜
S(π,F), and there exists a constantˆ K >0 such thatST,S⌊πT⌋, andST−⌊πT⌋are less thanKT
1 5
for allπ ∈[π1, π2]⊂(0,1); or, the QS kernel is used to estimate ˆS(π, F H0), ˆS(π,Fˆ), ˜S(π, F H0)
and ˜S(π,F), and there exists constantsˆ K1, K2 >0 such thatK1T 1
5 ≤ST, S⌊πT⌋, ST−⌊πT⌋≤
K2T 1
5 for all π∈[π1, π2]⊂(0,1); and (b) T 2 5
N →0 as N, T → ∞.
Theorem 2: Under Assumptions 1 - 7, if Condition 1 or Condition 2 holds, then
sup π∈[π1,π2]
S(π,ˆ Fˆ)−S(π, F Hˆ 0)→p 0
and
sup π∈[π1,π2]
S(π,˜ Fˆ)−S(π, F H˜ 0) p
→0
Theorem 2 shows that the infeasible sample variance can be replaced by the estimates computed
using ˆF. Given this result, we can compute the Wald statisticWT(π,Fˆ)≡A(π,Fˆ)′Sˆ−1A(π,Fˆ), the LM-like statistic LMT(π,Fˆ)≡A(π,Fˆ)′S˜−1A(π,Fˆ), supWT(π,Fˆ) and supLMT(π,Fˆ). To establish the asymptotic distributions for these statistics, we make the following assumption:
Assumption 9: (a) Ω ≡ limT→∞Var
(
vech
(
1
√
T
(∑T
t=1H0′ftft′H0−Ir
)))
is positive definite,
and ∥Ω∥<∞. Let ˆΩ1(π, F H0) and ˆΩ2(π, F H0) be consistent estimators of Ω satisfying that
sup π∈[π1,π2]
Ωm(π, F Hˆ 0)−Ω=op(1) for m= 1,2
(b)WT(π, F H0)≡A(π, F H0)′S(π, F Hˆ 0)−1A(π, F H0)⇒ Qp(π) and supπ∈[π1,π2]WT(π, F H0)
d
→
supπ∈[π1,π2]Qp(π), where Qp(π) = [Bp(π)−πBp(1)]′[Bp(π)−πBp(1)]/[π(1−π)] andBp(·) is a p-vector (p= r(r2+1)) of independent Brownian motions on [0, 1] restricted to [π1, π2]⊂(0,1).
Assumption 9(a) states that ˆΩm(π, F H0) converges to the population moment Ω uniformly
inπ. This is similar to Assumption 3 of Andrews (1993). Assumption 9(b) is just the main result
to the stochastic process Qp(π) restricted to [π1, π2] ⊂ (0,1), and supπ∈[π1,π2]WT(π, F H0)
converges to supπ∈[π1,π2]Qp(π) by the continuous mapping theorem. Note that all the terms in Assumption 9 are computed using the infeasible data F H0, which means that if F H0 were
observable, one would be able to use the conventional supreme Wald test. The following theorem
guarantees that one can use the estimated regressors, ˆF, to compute the sup-W statistic, which
has the same asymptotic distribution as the one computed usingF H0.
Theorem 3: Under Assumptions 1 – 9, if either Condition 1 or Condition 2 holds and
√
T N →0 asN, T → ∞, then
(i) supπ∈[π1,π2]WT(π,Fˆ)−WT(π, F H0)=op(1) and supπ∈[π1,π2]
LMT(π,F)ˆ −LMT(π, F H0)
=op(1).
(ii) supπ∈[π1,π2]WT(π,Fˆ) d
→supπ∈[π1,π2]Qp(π) and supπ∈[π1,π2]LMT(π,Fˆ)
d
→supπ∈[π1,π2]Qp(π).
Theorem 3 shows that one can use the conventional critical values for the sup-W and
sup-LM statistic computed using ˆF. The uniformity provided by part (i) of Theorem 3 also
shows that WT(π,F)ˆ ⇒ Qp(π) and LMT(π,Fˆ) ⇒ Qp(π) by assumption 9(b). Thus, the continuous mapping theorem implies that the mean Wald statistic and the average exponential
Wald statistic proposed by Andrews and Ploberger (1994) can also be used to test structural
breaks in factor loadings.
Corollary 1: Under Assumptions 1 – 9, if Condition 1 or Condition 2 holds and
√
T
N → 0 as N, T → ∞, then
ˆ π2
π1
exp
(
WT(π,Fˆ) 2
)
dπ− ˆ π2
π1
exp
(
WT(π, F H0)
2
)
dπ=op(1)
ˆ π2
π1
WT(π,F)dπˆ − ˆ π2
π1
WT(π, F H0)dπ=op(1)
Define exp-W( ˆF)≡ln
(
1
π2−π1 ´π2
π1 exp
(
WT(π,Fˆ) 2
)
dπ
)
and mean-W( ˆF)≡ π 1
2−π1 ´π2
π1 WT(π,
ˆ F)dπ.
Corollary 1 shows that critical values provided by Andrews and Ploberger (1994) can be
also holds for exp-LM( ˆF) and mean-LM( ˆF) which can be defined in a similar way.
1.2.4 Asymptotics under the Alternative Hypothesis
We consider the alternative hypothesis that a fraction of or all factor loadings have a single
break at a common break date. Let ⌊π∗T⌋+ 1 denote the break date of factor loadings. The factor F = (f1, f2, ..., fT)′ is aT×r matrix. ft can be written as ft= (f0′,t, f1′,t)′, wheref0,t is a q0×1 vector that denotes the factors that have time-invariant factor loadings, f1,t is a q1×1
vector that denotes the factors whose loadings change at⌊π∗T⌋+ 1, andr=q0+q1. The factor
model can be written as:
Xit =
f0′,tλ0,i+f1′,tλ1,i+eit if 1≤t≤ ⌊π∗T⌋ f0′,tλ0,i+f1′,tλ2,i+eit if ⌊π∗T⌋+ 1≤t≤T
(1.12)
where λ0,i is the factor loading of f0,t, and λ1,i and λ2,i are the pre- and post-break factor
loadings off1,t, respectively. The model can be also expressed in a matrix form:
X=
F0,1 F1,1 0
F0,2 0 F1,2
Λ′0 Λ′1 Λ′2
+e (1.13)
whereF0,1 = (f0,1, f0,2, ..., f0,⌊π∗T⌋)′,F0,2= (f0,⌊π∗T⌋+1, f0,⌊π∗T⌋+2, ..., f0,T)′,F1,1 = (f1,1, f1,2, ...,
f1,⌊π∗T⌋)′,F2 = (f1,⌊π∗T⌋+1, f1,⌊πT⌋+2, ..., f1,T)′, Λ0 = (λ0,1, λ0,2, ..., λ0,N)′, Λ1 = (λ1,1, ..., λ1,N)′, and Λ2 = (λ2,1, ..., λ2,N)′. Notice that Equation (1.13) is equivalent to a factor model that has r+q1 factors with time-invariant factor loadings, i.e.
where G =
F0,1 F1,1 0
F0,2 0 F1,2
is a T ×(r +q1) factor matrix, and Θ = [Λ0...Λ1...Λ2] is a
N×(r+q1) factor loading matrix. Letgtdenote thetthcolumn ofG′, i.e. gt≡(f0′,t, f1′,t,01×q1)′
if 1≤t≤ ⌊π∗T⌋, and gt≡(f0′,t,01×q1, f1′,t)′ if ⌊π∗T⌋+ 1≤t≤T. Let θi ≡(λ′0,i, λ′1,i, λ′2,i)′ so that Θ = (θ1, θ2, ..., θN)′. Let G1 ≡[F0,1...F1,1...0] and G2 ≡ [F0,2...0...F1,2]. Let ˆG, ˆG1, ˆG2 and ˆgt
denote the PCA estimates ofG,G1,G2 and gt.
To analyze the property of the test statistics under the alternative hypothesis, we make the
following assumptions:
Assumption 1’: maxt=1,...,T E∥gt∥4 <∞, T−1F0′,1F0,1
p
→ π∗Σ0,0,T−1F0′,2F0,2
p
→ (1−π∗)Σ0,0,
T−1F0′,1F1,1
p
→ π∗Σ0,1, T−1F0′,2F1,2
p
→ (1−π∗)Σ0,2, T−1F1′,1F1,1
p
→ π∗Σ1,1, T−1F1′,2F1,2
p
→
(1−π∗)Σ2,2 and T−1G′G
p
→ΣGasT → ∞, where Σ0,0, Σ1,1, Σ2,2 and ΣG are positive definite. Assumption 2’: ∥θi∥ ≤θ <¯ ∞,∥Θ′Θ/N−ΣΘ∥ →0 for some (r+q1)×(r+q1) positive definite
matrix ΣΘ, and∥Θ′Θ/N −ΣΘ∥ ≤O
(
1
√
N
)
.
Assumption 3’: The same as Assumption 3.
Assumption 4’: E
(
1
N
∑N
i=1√1T
∑T
t=1gteit 2)
≤M.
Assumption 5’: The same as Assumption 5.
Assumption 6’: There exists an M <∞ such that for all N and T:
(a) for each t, E√1 N T
∑T
s=1
∑N
k=1gs[eksekt−E(eksekt)] 2
≤M. (b)E√1
N T
∑T
t=1
∑N
k=1gtθ′kekt≤M (c) for each t, E√1
N
∑N
i=1θieit
4
≤M.
Assumption 7’: The eigenvalues of (r+q1)×(r+q1) matrix (ΣΘΣG) are distinct.
Assumption 8’: For any constants π1 and π2 that satisfy 0< π1 ≤π∗ ≤π2<1, supπ∈[π1,π2]
1
√
N T
∑⌊t=1πT⌋
∑N
k=1gtθk′ekt
=Op(1) and supπ∈[π1,π2]√1
N T
∑T
t=⌊πT⌋+1
∑N
k=1gtθ′kekt
Remarks: (1) The first part of Assumption 1’ that maxt=1,...,TE∥gt∥4 < ∞ is implied by
Assumption 1 that E∥ft∥4 < ∞, since gt ≡ (f0′,t, f1′,t,01×q1)′ if 1 ≤ t ≤ ⌊π∗T⌋, and gt ≡
(f0′,t,01×q1, f1′,t)′ if⌊π∗T⌋+ 1≤t≤T. However, E(gtg′t) is not constant over time. Also, Σ1,1
and Σ2.2 can be different. This is different from Assumption 8(b) where two subsample averages
converge to the same limit. Thus, time-varyingE(gtg′t) leads to Assumption 8’ only consisting of the analog of Assumption 8(a). Assumption 2’ allows thatλ1,i =λ2,i for somei, i.e. only a
fraction of factor loadings have structural breaks. The positive definiteness of ΣΘ rules out the
case where only o(N) many factor loadings are time-varying.
(2) Assumptions 2’ – 7’ are just analogs of Assumptions 2 – 7,3 and the difference is that the
factor ft is replaced bygt and the dimension of factor loadings is augmented from r tor+q1.
Thus, although Assumptions 1’ – 7’ look different from Assumptions 1 – 7, they still maintain
the canonical assumptions for (1.14) under the alternative hypothesis, and hence many results
in Bai and Ng (2002) and Bai (2003) are directly applicable.
We next define the analogs of VN T, V, Υ, H, and H0 under the alternative hypothesis.
Let UN T be the (r +q1)×(r+q1) diagonal matrix of the first r+q1 largest eigenvalues of
(1/T N)XX′in descending order. LetU be the probability limit ofUN T, whereUis the diagonal matrix consisting of the eigenvalues of Σ
1 2 ΘΣGΣ
1 2
Θ in descending order (Lemma A3, Bai and Ng,
2003). Let Ξ denote Σ
1 2 ΘΣGΣ
1 2
Θ’s eigenvectors that correspond toU such that Ξ′Ξ =Ir+q1. Let
J = (Θ′Θ/N)(G′G/Tˆ )UN T−1 be an (r+q1)×(r+q1) matrix. Denote plimT ,N→∞J asJ0, which
is a non-singular matrix (see Proposition 1 of Bai, 2003). Finally, let
D1≡
Σ0,0 Σ0,1 0
Σ′0,1 Σ1,1 0
0 0 0
, D2 ≡
Σ0,0 0 Σ0,2
0 0 0
Σ′0,2 0 Σ2,2
and C≡J0′(D1−D2)J0. 3
To establish the consistency of the test under the alternative hypothesis, we need
Assump-tion 9’ that regulates the asymptotic property of the variance matrix in our statistics. Define
ˆ
Ω1(π∗, GJ0), ˆΩ2(π∗, GJ0), ˆΩ(GJ0) by replacing π,F,H0 andIrin equations 1.8, 1.9, 1.10, and
1.11 withπ∗,G,J0andIr+q1, respectively. Let ˆS(π∗, GJ0) = 1
π∗Ωˆ1(π∗, GJ0) +
1
1−π∗Ωˆ2(π∗, GJ0) and ˜S(π∗, GJ0) = π1∗Ω(GJˆ 0) + 1−1π∗Ω(GJˆ 0). Define ˆS(π∗,G) and ˜ˆ S(π∗,G) by replacingˆ GJ0
with ˆG.
Assumption 9’: (a)
plimT→∞inf
{
vech(C)′
[
max(S⌊π∗T⌋, ST−⌊π∗T⌋) ˆS(π∗, GJ0)−1
]
vech(C)
}
>0
plimT→∞inf
{
vech(C)′
[
STS(π˜ ∗, GJ0)−1
]
vech(C)
}
>0
where S⌊π∗T⌋,ST−⌊π∗T⌋, and ST are the bandwidth parameters for ˆΩ1(π∗, GJ0), ˆΩ2(π∗, GJ0),
and ˆΩ(GJ0), respectively.
(b) Condition 1 or 2 holds for ˆS(π∗, GJ0), ˆS(π∗,G), ˜ˆ S(π∗, GJ0), and ˜S(π∗,G).ˆ
Remark: Assumption 9’(a) ensures that WT(π∗, GJ0) and LMT(π∗, GJ0) diverge under the
alternative asT goes to infinity. Contrast to Equation 1.7, it is worth noting thatE(J0′gtg′tJ0)̸=
Ir+q1 under the alternative hypothesis, so the HAC estimates are not properly demeaned. Hall
(2000) investigates the properties of HAC estimates that are not properly demeaned in the
context of overidentifying restriction tests. He shows that if the HAC estimate is not correctly
demeaned, then it will diverge at the rate of the bandwidth parameter BT. Theorem 2 of
Hall (2000) also shows that the overidentifying restrictions test statisticQT will diverge at the
rate T /BT and that (BTQT)/T is bounded away from zero as T goes to infinity. Although
Hall’s (2000) results are developed in the context of overidentifying restriction tests, they can
be readily extended to our test statistics, because these two types of statistics are constructed
using the same quadratic form. Assumption 9’(a) can be verified using Hall’s proof (2000,
Theorem 4: Under Assumptions 1’ – 9’,
(i) There exist some non-random matrixC̸= 0, such that ⌊π∗1T⌋∑t⌊=1π∗T⌋gˆtgˆt′−⌊T−1π∗T⌋
∑T
t=⌊π∗T⌋+1
ˆ gtgˆt′
p
→C.
(ii) Suppose that vech(C) is not in the null space of [plimN,T→∞S(πˆ ∗,G)]ˆ −1and of [plimN,T→∞ ˜
S(π∗,G)]ˆ −1For any constantsπ1andπ2that satisfy 0< π1≤π∗ ≤π2<1, supπ∈[π1,π2]WT(π,G)ˆ
and supπ∈[π1,π2]LMT(π,G) are consistent under the alternative hypothesis that a fraction ofˆ N cross sections have structural breaks in their factor loadings at a common time⌊π∗T⌋.
Remarks: (1) Theorem 4(i) shows that pre- and post-break subsample means of ˆgtgˆt′
con-verge to different limits under the alternative hypothesis. This explains why just using a Wald
statistic computed using estimated factors can in fact test the structural breaks in factor
load-ings. Note that the factors (in static form) are estimated by PCA which implicitly assumes
that the factor loadings are time-invariant. This implies that if there are structural breaks in
the factor loadings, then PCA will in fact estimate an equivalent factor model (see equation
(1.13)) with more factors and time-invariant factor loadings. Although both ˆF′F /Tˆ and ˆG′G/Tˆ are equal to identity matrices under the null and the alternative hypotheses, ⌊πT1 ⌋∑t⌊=1πT⌋fˆtfˆt′ and T−⌊1πT⌋∑Tt=⌊πT⌋+1fˆtfˆt′ converge to the same limit for any π ∈ [π1, π2] ⊂ (0,1), while
1
⌊π∗T⌋
∑⌊π∗T⌋
t=1 ˆgtˆg′tand ⌊T−1π∗T⌋
∑T
t=⌊π∗T⌋+1gtˆˆgt′ converge to different limits due to the augmented factor space caused by the implicit restriction of PCA that the factor loadings have to be
un-changed over time. Thus, distinguishing the null and the alternative hypotheses is equivalent
to comparing the pre- and post-break subsample means of ˆftfˆt′ or ˆgtˆg′t.
(2) Note that different behaviors of ˆftfˆt′ and ˆgtˆgt′ result from the fact that both ˆG1 and ˆG2 do
not have full column ranks under the alternative hypothesis. This indicates that the number
of factors plays an important role in determining the asymptotics of the test statistics in this
paper. In practice, the number of factors is commonly estimated using IC proposed by Bai and
Ng (2002), so the asymptotics of IC under the null and alternative hypotheses will substantially
and Ng’s IC in fact help our statistics distinguish the null and alternative hypotheses in large
samples:
Proposition: Under Assumptions 1’–4’, Bai and Ng’s information criteria consistently
esti-mate the number of factors of the equivalent model (Equation 1.14).
What IC does is equivalent to determining the number of (asymptotically) non-zero eigenvalues
of XX′/N T. Under the null hypothesis, Assumptions 1 – 4 are just all assumptions that are required by Bai and Ng’s IC, so the number of factors, i.e. the number of non-zero eigenvalues of
XX′/N T, can be consistently estimated. Under the alternative hypothesis, Assumptions 1’ – 4’ are just the all assumptions required for the equivalent model with time-invariant factor loadings
(see Equation (1.13)), so IC will consistently estimate the number of factors r+q1. Thus, the
asymptotics of test statistics proposed in this paper will not be affected by implementing IC in
the first stage as N andT tend to infinity, and the finite-sample effect of the first-stage IC will
be investigated in Monte Carlo experiments in the next section.
(3) When IC is used in the first stage to determine the number of factors, tests for structural
breaks should not be based on the factor loadings. For example, the traditional Chow test for
testingλi1 =λi2 will not have power under the alternative hypothesis, because the factor
load-ings of the equivalent model,θi, are actually time-invariant under the alternative.4 Therefore,
in order to test structural breaks in factor loadings, one should focus on the estimated factors
rather than the estimated factor loadings.
1.3 Monte Carlo Simulations
In the Monte Carlo experiments we investigate the finite sample properties of our statistics for
known and unknown break points. Section 1.3.1 compares the performance of our Wald testW
and LM-like testLM with BE’s pooled testSBEand the Bonferroni testsBon, whereW andLM
4Breitung and Eickmeier (2011) also point out that the Chow test statistic will be lack of power if the number
abbreviateWT(π,F) andˆ LMT(π,Fˆ),respectively. Recall thatSBE =
(∑N
i=1si−rN
)
/√2rN, where si is the LM statistic5 for the ith variable and r is estimated by Bai and Ng’s IC, ICp1
and ICp2. We use three different superscripts to denote the way to compute si: s 0
i denotes the
LM statistic assuming that the idiosyncratic shocks are conditional homoskedastic and serially
uncorrelated; sGLSi denotes the LM statistic computed using quasi-demeaned residuals which
are based on AR models with lags selected by BIC; sHACi denotes the LM statistic computed
using HAC estimate. Let S0
BE,SBEGLS and SBEHAC denote the pool statistics computed using s0i,
sGLSi and sHACi , respectively. Besides the pooled statistics, we also include the results based
on Bonferroni critical values: F−1(1−5%/N), where F is the chi-square CDF with degree of freedom ˆr. The reason for considering the Bonferroni test is that there are N individual LM
statistics si, using the 5% significance level for each si will always result in a fraction of all
si rejecting the null hypothesis even if the factor loading matrix is constant over time. The
Bonferroni method is a simple way to control the overall type I error of allsistatistics. Lets0Bon,
sGLSBon and sHACBon denote the Bonferroni statistics based on si0,sGLSi and sHACi , respectively. In
addition, theW andLM statistics are computed using three different estimates for the sample
variances: W0 and LM0 are computed using White’s (1980) conditional heteroskedasticity
robust estimate; WB and LMB are computed using Newey and West’s (1994) data dependent
HAC estimate based on the Bartlett kernel;WQS andLMQS are computed using the same data
dependent HAC estimate but based on the QS kernel.
Section 1.3.2 compares the performance of the sup-W, exp-W, mean-W, sup-LM, exp-LM,
and mean-LM tests when a break date is unknown. Similar to Section 1.3.1, the subscripts “0”,
“B” and “QS” denote the statistics using the conditional heteroskedasticity robust estimate,
HAC estimate based on the Bartlett kernel, and HAC estimate based on the QS kernel,
respec-tively. Section 1.3.3 provides Monte Carlo experiments on the power comparison between our
and CDG’s tests.
In all Monte Carlo experiments, the R2 = trace(ee′)/trace(XX′) is set to be 50% and the
5
number of replications is 5000 for each DGP.
1.3.1 Testing Breaks with Known Break Date
Our first experiment focuses on the sizes of W, LM, sBon and SBE when the break date is
known. The model is xit =
∑r
k=1λikfkt+κeit, where λik ∼ i.i.d.N(b2,1), and fkt and eit are generated by the following DGPs:
N1: fkt, eit∼i.i.d.N(0,1),κ=
√
(1 +b2/4)r.
N2: fkt∼i.i.d.N(0,1),eit=σi(νit+
∑
1≤|j|≤Pβνi−j,t),σi ∼i.i.d.U(0.5,1.5), νit∼i.i.d.N(0,1), and κ=√12(1 +b2/4)r/13(1 + 2P β2).
N3: fkt = ρffkt−1 +µit, µit ∼ i.i.d.N(0,1 −ρ2f), eit = σiνit, σi ∼ i.i.d.U(0.5,1.5), νit = ρννit−1+ϵit+ωϵϵit−1,ϵit∼i.i.d.N
(
0,1+(ρ 1
e+ωϵ)2/(1−ρ2e)
)
, and κ=√12(1 +b2/4)r/13.
We setb= 1 in N1 – N3. N1 is the simplest DGP: both factors and idiosyncratic shocks are
i.i.d, i.e. no correlation or heteroskedasticity is involved. Both N2 and N3 allow
heteroskedas-ticity acrossi, and we follow Breitung and Eickmeier’s (2011) setup: σi ∼i.i.d.U(0.5,1.5). N2 also allows limited cross-sectional correlation in idiosyncratic shocks ifβ̸= 0 andP ≥1. We let β ∈ {0,0.1}and P ∈ {6,8}, and these values are similar to those of Onatski (2010). DGP N3 considers the the case where both factors and idiosyncratic shocks are serially correlated. The
factors are assumed to be AR(1) processes, and ρf = 0.7 which leads to mild persistency. νit
follows an AR(1) process ifωϵis zero, or an ARMA(1, 1) process otherwise. We setωϵ ∈ {0,0.5} and ρν = 0.5. Table 1.1 reports the the size of the Bonferroni test, BE’s pooled tests and our
tests. The last column of Table 1.1 is averaged number of factors selected byICp1 of Bai and
Ng (2002). Under DGPs N1 and N2 without cross-sectional correlation (β = 0), the sizes of
SBE0 , SBEGLS, W0 and LM0 are close to 5%. The tests based on the Bonferroni critical values
or HAC estimates are relatively conservative, but their rejection rates approach 5% as N and
T increase. Under DGP N2 with cross-sectional correlations (β ̸= 0 and P > 0), the pooled tests tend to over-reject the null hypothesis. For example, the effective size of SBEGLS is 16.2%
arbitrary correlation across si, the size of s0Bon, sGLSBon and sHACBon does not exceed the nominal
level. Our tests are computed using ˆF which does not require the independence of idiosyncratic
shocks, so the size of our tests is robust to cross-sectional correlation in eit. The IC tends to
over-estimate the number of factors when the correlation is relatively strong. For instance,
when P = 8, β = 0.1, N = 100, and T = 200, the average of estimated number of factors is
6.37, but our test statistics are robust to this uncertainty caused by IC. Under DGP N3, SHAC BE
always rejects more than 75% of the times, which is similar to the results in the working paper
version of Breitung and Eickmeier (2011). The size ofSBEGLS is close to 5% except in the cases
where N is relatively larger than T. The size of W and LM based on HAC estimates are not
far from 5%, andLM tends to have better size thanW for small T.
The second experiment compares the powers ofW,LM,sBonandSBE when the break date
is known. The break date is set to be T2, and the data are generated by the following DGPs6:
A1: xit=∑rk=1λikfkt+κeit for i= 1,2, ..., N and t≤T /2, and xit=∑rk=1(λik−b)fkt+κeit for i = 1,2, ..., N and t ≥ T /2 + 1, where fkt, eit ∼ i.i.d.N(0,1), κ = √(1 +b2/4)r, and
λik∼i.i.d.N(2b,1). A2: xit =
∑r
k=1λikfkt+κeit for i = 1,2, ..., αN and t ≤ T /2, xit =
∑r
k=1(λik −b)fkt+τ eit for i = 1,2, ..., αN and t ≥ T /2 + 1, and xit =
∑r
k=1λikfkt+κeit for i= αN + 1, ..., N and
t= 1,2, ..., T, where fkt, eit ∼i.i.d.N(0,1), κ=
√
(1 +b2/4)r,λ
ik∼i.i.d.N(b2,1), andb= 1. DGP A1 focuses on how the power changes as the magnitude of break in factor loadings
increases. We setb∈ {1/3, 2/3, 1, 2}. Table 1.2 summarizes the results under DGP A1. The power of the pooled tests and our tests have exactly the opposite pattern. When b= 1/3 and
N and T are relatively small, the pooled tests are very powerful, while ours do not have good
power. However, as N and T increase, our tests become powerful. When N and T = 500,
our test always reject the null, whereas the pooled tests reject less than 10%. Additionally,
when b becomes larger, LM and W are powerful even for small N and T, while the power of
the pooled tests is in fact close to the nominal size. The reason for this phenomenon is that
6