ABSTRACT
RAJNEESH, RAJNEESH. Scheduling Precedence-Constrained Jobs on Two Resources to Minimize the Total Weighted Completion Time. (Under the direction of Salah E. Elmaghraby.)
We study a problem of scheduling precedence-constrained jobs on two pre-specified
resources with the objective of minimizing the weighted completion time. We present
two mathematical formulations of the problem: a dynamic programming (DP) model
and a binary integer programming (BIP) model. Due to the strong N P-hardness of the problem, even for two resources with chain-type precedence constraints among the jobs
with weight and processing times of 1, we restrict our analysis to the case when the
precedence constraints result in a series-parallel (s/p) graph. We focus on reducing the
state space in the DP model to obtain an optimal, or near optimal, solution. We compare,
through a number of experiments with varying number of jobs, resource requirements,
and topology of the precedence among the jobs, the performance of the DP and the BIP
©Copyright 2012 by Rajneesh Rajneesh
Scheduling Precedence-Constrained Jobs on Two Resources to Minimize the Total Weighted Completion Time
by
Rajneesh Rajneesh
A thesis submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the degree of
Master of Science
Operations Research
Raleigh, North Carolina
2012
APPROVED BY:
Yahya Fathi Matthias F. Stallmann
DEDICATION
BIOGRAPHY
Rajneesh was born in Ranchi, India. He attended Ranchi University, India and graduated
in 2002 with a Bachelor of Science in Mathematics as an honors subject. He continued
his studies further for Master of Science (M.Sc.) in Mathematics and Computing from
Indian School of Mines (ISM), Dhanbad, India and received M.Sc. degree in 2004.
After graduating from ISM, he received the opportunity to work in a sponsored
re-search from the Department of Science and Technology, India, to study the seismic
activ-ities in Eastern India. In 2005, he accepted an offer as a teaching assistant at the Indian
Institute of Management, Ahmedabad (IIMA). He received a Junior Research Fellowship
in 2006 from the Indian Space Research Organization (ISRO) and worked on the
numer-ical weather forecasting models. He accepted a position at the Indian School of Business
(ISB), Hyderabad in 2007 to work on a research project and as a teaching assistant.
He joined North Carolina State University in 2008 to pursue graduate studies in
Operations Research. He taught undergraduate Mathematics courses in the Fall of 2008
and the Spring of 2009. He was teaching assistant for graduate level OR courses during
the Fall of 2009, the Spring of 2010 and the Spring of 2011 semesters. He received a
full-time internship at the JMP development group at SAS Institute Inc., Cary, in the
Summer of 2010 and the Fall of 2010 semesters. He continued to work part-time at SAS
ACKNOWLEDGEMENTS
Foremost, I would like to thank my advisor, Dr. Salah E. Elmaghraby, who made this
work possible by introducing me to the research problem. I greatly appreciate his kind
and wise guidance throughout my research. Dr. Elmaghraby’s Dynamic Programming
(DP) class stimulated my interest in DP modeling approach and was very helpful in my
research formulation. I am particularly grateful to him for the patience he showed in me,
teaching me how to become a good researcher and a better person in life. Working with
him has been my best learning experience at NCSU and I will forever be grateful to him.
I am thankful to my committee members, Dr. Yahya Fathi and Dr. Matthias F.
Stallmann, for their suggestions and valuable comments that helped in making this thesis
better. Dr. Fathi’s Linear Programming and Integer Programming classes helped me a lot
in the formulation of my research problem. Dr. Stallmann’s feedback on the experiments
to perform helped me to improve the discussion in the results section of my thesis.
I am also thankful to all the faculty members of the Graduate Program in Operations
Research, who have had a direct or indirect influence on my graduate studies and research
work. I would like to thank the current co-directors of the Department of Operations
Research, Dr. Thom Hodgson and Dr. Negash Medhin, for always being available to
listen and give advice. I give my special thanks to the current OR program assistant, Ms.
Linda Smith for helping me during my graduate studies in taking care of all the academic
and administrative affairs with great efficiency. I would also like to thank Ms. Barbara
Walls, for providing me the administrative guidance during my first arrival in the US.
I am thankful to all the staff members of the Department of Industrial and Systems
Engineering, and the Department of Mathematics at NCSU.
Operations Research, and in the Department of Industrial and Systems Engineering at
NCSU for their help during my graduate studies. It was a pleasure to know them
indi-vidually and work with them during our problem solving sessions. My stay in Raleigh
has been memorable, thanks to all my friends with whom I shared my apartment. I am
also thankful to my friends in the US whom I visited several times during holidays.
I am grateful to the financial support I received from the Department of Operations
Research during my graduate studies. My special thanks to the Department of
Mathe-matics at NCSU, for giving me an opportunity to teach undergraduate classes. I would
like to thank the JMP Development group at SAS Institute Inc., Cary, for the internship
from the Summer of 2010 to the Spring of 2012 semesters, which was a productive and
learning experience for me.
I am very grateful to my two elder brothers, who were always encouraging in my
career goals and helped me in all possible ways to achieve them. Lastly, I would not
be who I am without the loving and everlasting support of my parents. They instilled
in me the value of knowledge, without which my research motivation would have been
incomplete.
Thank you very much to all!
“Your right is to work only, but never to the fruit thereof. Be not instrumental in
making your actions bear fruit, nor let your attachment be to inaction.”
TABLE OF CONTENTS
List of Tables . . . viii
List of Figures . . . ix
Chapter 1 Introduction . . . 1
1.1 Background . . . 1
1.2 Statement of the Problem . . . 4
1.3 Problem Complexity . . . 5
1.4 Literature Review . . . 8
1.5 Organization and Outline . . . 12
Chapter 2 The Mathematical Models . . . 14
2.1 A Dynamic Programming (DP) Formulation . . . 19
2.1.1 The elements of Dynamic Programming . . . 19
2.2 New lower and upper bounds on resource availability . . . 25
2.3 The Re-sequencing Procedure . . . 25
2.4 A Binary Integer Programming (BIP) Formulation . . . 28
Chapter 3 The Heuristic-DP Algorithm . . . 36
3.1 The Procedure Based on the BDT . . . 37
3.1.1 Series Composition . . . 38
3.1.2 Parallel Composition . . . 39
3.2 The Heuristic-DP (H-DP) Algorithm . . . 41
3.3 An Example of the H-DP Algorithm . . . 41
3.4 Comparison with Balisetti’s Approach . . . 49
3.5 Results . . . 53
Chapter 4 Conclusion and Future Research . . . 58
4.1 Conclusion . . . 58
4.2 Future Research . . . 59
References . . . 61
Appendices . . . 64
Appendix A Figures . . . 65
A.1 Figures . . . 65
Appendix B Example . . . 75
Appendix C Codes . . . 84
LIST OF TABLES
Table 2.1 Comparison between the BIP and alt-BIP formulations . . . 35
LIST OF FIGURES
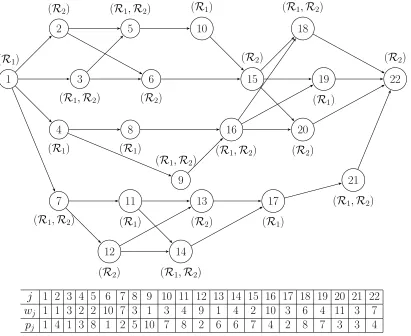
Figure 1.1 22-job network . . . 6
Figure 2.1 The system at stage Ik . . . 19
Figure 2.2 At stage Ik with a decision to process job j[1] . . . 21
Figure 2.3 At stage Ik with a decision to process job j[2] . . . 21
Figure 2.4 At stage Ik with a decision to process compatible jobs h j[2] j[1]i . . . 22
Figure 2.5 At stage Ik with a decision to process job j[1,2] . . . 22
Figure 2.6 An example of initial set for 22-job network (Figure 1.1) . . . 24
Figure 2.7 An example of Re-sequencing procedure . . . 27
Figure 3.1 Series composition procedure flowchart . . . 40
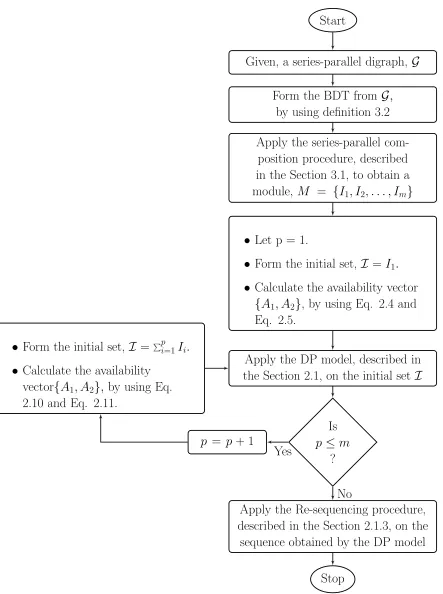
Figure 3.2 Heuristic-DP (H-DP) algorithm flowchart . . . 42
Figure 3.3 Binary decomposition tree (BDT) of 22-job network (Figure 1.1) . 43 Figure 3.4 Final schedule of jobs on resources for 22-job network (Figure 1.1). 48 Figure 3.5 Jobs requiring resource R1 for 22-job network (Figure 1.1). . . 49
Figure 3.6 Jobs requiring resource R2 for 22-job network (Figure 1.1). . . 50
Figure 3.7 Jobs requiring resources (R1, R2) for 22-job network (Figure 1.1). 51 Figure A.1 6-job network . . . 66
Figure A.2 9-job network . . . 67
Figure A.3 11-job network . . . 68
Figure A.4 13-job network . . . 69
Figure A.5 17-job network . . . 70
Figure A.6 22-job network . . . 71
Figure A.7 25-job network . . . 72
Figure A.8 30-job network . . . 73
Chapter 1
Introduction
1.1
Background
Scheduling problems are the class of optimization problems that deals with the allocation
of scarce resources (for example, processors or machines) to jobs, or tasks, over time.
These jobs may be related to each other by precedence relationships; that is, a job can
be processed only if all its predecessor jobs have completed their processing on their
respective resources, and the required resources are available for the current job.
Scheduling problems, especially those that require the simultaneous use of more than
one resource, arise in various areas such as manufacturing, production, service operations,
health care systems, and transportation, among others. Because of their importance,
scheduling problems have been extensively studied from the theoretical point of view
as well as their practical implementation. These problems are ubiquitous in the various
fields of engineering and management today, and indeed in everyday life experiences. For
example,
where a task needs to be processed by several processors simultaneously in order
to find a fault.
In the berth allocation problems at maritime ports, a large vessel (representing a task) may occupy several berths (representing a machine) for loading and/or
unloading.
In the planning of semiconductor circuit design workforce, a modular task is usually assigned to a team of people (representing aresources) to process the task (or jobs)
simultaneously.
In the car repair shops, a car has several broken parts that need to be repaired by one or more mechanics in the shop. These mechanics have to work on different
parts of the car in the order of their precedence; some parts need only one mechanic,
whereas others require more than one working simultaneously on the broken parts.
The car will leave the shop only when every broken part has been fixed.
A large number of practical problems similar to those mentioned above may be found
in different contexts; which existence motivated this research.
Similar to the other optimization problems, a scheduling problem also has two parts:
The first is theobjective function that one tries to optimize. In scheduling problems, typical objective functions are: minimize the weighted completion time of the jobs,
or the mean flow time, or the makespan (schedule length), or the total lateness of
the jobs (which presumes the existence of a due date for each job); and so forth.
The objective function is also called theperformance measure.
In the scheduling literature, the single resource scheduling problem is one of the most
extensively studied problems. There is a substantial body of work done on the scheduling
problem on a single resource, with or without precedence relations among the jobs, to
minimize the total weighted completion time ([4], [7], [14], [20], [21], [26]). However,
much less is known for more than one resource; only within the past two decades have
researchers addressed the multiple resource case. As expected, some of the work on the
single resource give valuable insights into the treatment of problems of more than one
resource.
Scheduling problems with precedence constraints are among the most difficult
prob-lems in the area of machine scheduling because of the impossibility of solving them
to optimality; either in polynomial time or with a known performance guarantee of an
approximate algorithm, which spills over to the difficulty in the design of good
approxi-mation algorithms. The understanding of the structure of these problems and the search
for their optimal or near-optimal solutions are continuing unabated in the operations
research field.
Historically, scheduling problems were the first problems to be analyzed for the study
of approximation algorithms. Garey et al [10] and later Johnson [16] formalized the
concept of an approximation algorithm. An approximation algorithm is evaluated by
its worst-case possible relative error over all possible instances of the problem, and is
necessarily executed in polynomial time. Formally an approximation algorithm for
min-imization, or maxmin-imization, of an objective function is defined as follows:
For minimization problems, an algorithmA is said to be a δ−approximation algo-rithm to problemP if for every instanceI ofP it delivers a solution that is at most
For maximization problems, a δ−approximation algorithm delivers for every in-stance I of P a solution that is at least δ times the optimum. In this case δ < 1,
and the closer it is to 1, the better.
In the literature for the minimization problem,δis referred as theapproximation ratio,
orperformance guarantee, orworst case ratio, orworst case error bound, orapproximation
factor. Similarly, for the maximization problem 1/δ is referred to by any of these names.
The following points highlight the complexity of these problems and their solution
procedures.
The first approximation algorithm by Graham [12] for a single machine problem with precedence constraints to minimize the makespan (the completion time of the
last job), is still used for solving this problem.
The complexity of a problem of m (≥3) identical parallel machines with each job requiring a processing time of one time unit and the jobs are arranged by precedence
for the objective of minimizing the makespan is still an open problem as listed by
Garey et al [11].
For the problem of a single machine or m > 1 identical parallel machines with the objective of minimizing the weighted completion time, the constant-factor
ap-proximation algorithms were only developed over the last two decades ([18], [26]
etc.).
1.2
Statement of the Problem
switches over from one job to another and preemption is not allowed. A job j ∈ N, has one or more precedence relations; for example,j1, j2,andj3 are three jobs from the setN
such that j2 ≺ j1 and j2 ≺j3; where “≺” denotes precedence. The precedence relations
constitute a series-parallel (s/p) digraph (definition 2.2 or [30]). The processing time of
job j ∈ N, is a positive number pj > 0. Let Cj be the completion time of job j ∈ N. The objective is to find a feasible schedule that minimizes the total weighted completion
time, that is,
minX
j∈N
wjCj,
where wj ≥0 is the weight of job j ∈ N.
Figure 1.1 gives an illustrative example for a series-parallel digraph of 22 jobs with
resource requirement for each job shown next to each node, the weight and processing
time of each job are given in the table. Let j2 = 8, j1 = 16 and j3 = 9; then j2 ≺j1 and j3 ≺j1 shows an example of precedence relations for j1, j2,and j3 .
1.3
Problem Complexity
Hoogeveen et al [15] investigated the computational complexity of scheduling
multi-processor (or multi-resource) tasks (or jobs) with pre-specified multi-processor (or resource)
requirements. They investigated the complexity of a problem with the objective of
min-imizing the sum of the task (or job) completion times (i.e., wj = 1,∀j ∈ N in the objective function stated above), in the presence of precedence constraints. In their
pa-per the standard notation scheme of α | β | γ ([19]) was used to represent scheduling problem structure, where
1 (R1)
2 (R2)
3 (R1,R2)
4 (R1)
5 (R1,R2)
6 (R2)
7 (R1,R2)
8 (R1)
9 (R1,R2)
10 (R1)
11
(R1)
12
(R2)
13
(R2)
14
(R1,R2)
15 (R2)
16
(R1,R2)
17
(R1) 18 (R1,R2)
19
(R1)
20
(R2)
21
(R1,R2) 22 (R2)
j 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
wj 1 1 3 2 2 10 7 3 1 3 4 9 1 4 2 10 3 6 4 11 3 7
pj 1 4 1 3 8 1 2 5 10 7 8 2 6 6 7 4 2 8 7 3 3 4
Figure 1.1: 22-job network
number of resources (or processors). For example,α≡P3 refers to three processors (or resources).
β is the task (or job) characteristics. The notation β may denote either process-ing time of task (or job); or task (or job) requirements (that is, job j require
resource R1 for processing, etc.); or the precedence relationship among jobs (that
is, series-parallel or no precedence, etc.); or any combination of processing time,
time unit.
γ represent the objective function; for example, γ ≡ PCj, where Cj is the com-pletion time of job j, is the total of completion time.
For instance, P m |chain, f ixj, pj = 1| PwjCj refers to a scheduling problem with
m processors (or resources, denoted by P m) to minimize the total weighted completion
time (represented as PwjCj); where the processing time of job j is one time unit (that
is, pj = 1); the processor (or resource) allocated to job j is pre-specified (denoted by
f ixj; for example, job j require resource R1 for processing, etc.); and each job has at
most one predecessor and at most one successor (referred to as chain). They proposed a
total of 15 theorems; the two most important theorems, Theorem 3.3 and Theorem 3.6,
given below are closely related to this thesis.
Theorem 1.1(Theorem 3.3 from Hoogeveen et al [15]). TheP2|f ixj |PwjCj problem is N P−hard in the strong sense.
Theorem 1.2 (Theorem 3.6 from Hoogeveen et al [15]). The P2| chain, f ixj, pj = 1 | P
Cj problem is N P−hard in the strong sense.
Both the Theorems 1.1 and 1.2 were proved based upon a reduction from 3−partition. Combining both theorems, we get
Theorem 1.3. TheP2|chain, f ixj, pj = 1|PwjCj problem is N P−hard in the strong sense.
The problem of concern to us in this thesis,P2|s/p, f ixj, pj |PwjCj,is a generaliza-tion of the problem considered in the Theorem 1.3; hence, the problemP2|s/p, f ixj, pj | P
1.4
Literature Review
Since we focus on the objective of the total weighted completion time, we present here
what is known about this problem and what we consider to be the most relevant models.
For readers interested in scheduling theory in general, the book by Pinedo [22] is an
excellent recent text to consult. We have limited our studies to the objective of the total
weighted completion time because wj may represent either a holding cost per unit time
or the value already added to job j, both of which are of concern to management.
In deterministic scheduling theory, it has been typically assumed that each task is
processed by only one processor at a time. For the unconstrained single-machine problem
to minimize the sum of the weighted completion time, a simple interchange argument
proves that ordering the jobs according to non-decreasing pj/wj ratio is optimal; this
policy is known as Smith’s Rule as described in Smith’s paper [29]. When wj = 1,∀j; so that the objective is to minimize the sum of the (unweighted) completion times, Smith’s
rule says simply to process the jobs in the order of non-decreasing processing times (this
is the well-known SPT-rule).
The precedence constrained single-machine scheduling problem has attracted much
attention in the Operations Research community since Sidney’s [28] pioneering work in
1975. Sidney proposed a decomposition theorem (this is known asSidney’s decomposition
theorem) that partitions the set N of jobs into subsets or modules M1, M2, . . . , Mk (by using a generalization of Smith’s rule [29]); such that there exists an optimal schedule
where jobs from Mi were processed before jobs from Mi+1, for any i= 1, . . . , k−1.
Lawler [17] studied the problem of sequencing a set of n jobs on a single machine
subject to precedence constraints with the objective to minimize the total weighted
undirected graph G = (N,A), the nodes of G were assigned to integer points 1,2, . . . , n
on the real line to minimize the sum of arc lengths) into various versions of the sequencing
problems. He proved the N P−completeness of the special cases of the problem under the arbitrary precedence: (i) when all job weights, wj = 1 and the processing time of
job j, pj ∈ {1,2,3}; and (ii) when the processing time of jobj, pj = 1 and the weight of job j, wj ∈ {k, k+ 1, k+ 2}, for any integer k.He also provided an elegant procedure of O(nlogn) for achieving the optimal sequence when the precedence relations result in a
series-parallel (s/p) graph.
It is very easy to find good feasible solutions; i.e., to obtain good upper bound on the
optimal value, to single machine scheduling problems, but it is very difficult to obtain
the tightest lower bound. The difficulty in finding optimal solutions, and the recent
advances in solving various combinatorial optimization problems via integer or mixed
integer programming (MIP), has encouraged many to study formulation of scheduling
problems as MIP modeling. Several MIP models and linear programming relaxations
have been proposed for this problem; which can be divided into three main groups based
on the decision variables used:
Dyer et al [8] exploit time-indexed variables, which are binary variables indicating when a job is completed. They derived various valid inequalities using time-indexed
variables in an MIP model to describe the convex hull of set of feasible solutions,
both in the absence of precedence constraints and in the presence of release dates
of jobs.
Balas [1] directly used the completion time variables in the presence of precedence constraints to obtain tight bounds for the Linear Programming (LP) relaxation.
indicate the order of job sequence, to obtain tight valid inequalities.
As mentioned above, LP relaxation in these three treatments has been applied to
ob-tain the constant-factor approximation algorithms. Hall et al [13] proposed time-indexed
LP relaxations that have (4 +)-worst case error bound approximation algorithms. A
weaker LP relaxations in completion time variables obtains 2-worst case error bound
approximation algorithm as shown by Schulz [27]. A LP relaxation in linear ordering
variables as suggested by Potts [23] can be used to obtain another 2-worst case error
bound approximation algorithm. Chudak et al [6] proposed a relaxation of Pott’s linear
program showing that the weaker linear program can be solved by one min-cut
compu-tation, which yields a combinatorial 2-worst case error bound approximation algorithms.
Chekuri et al [5] used Sidney’s decomposition theory to give an entire family of
combi-natorial 2-worst case error bound approximation algorithm.
Correa et al [7] discussed the problem of sequencing precedence-constrained jobs on
a single machine to minimize the total weighted completion time. They looked at the
problem from the polyhedral perspective, and presented a generalization of Sidney’s
results which leads to the conclusion that virtually all known 2-approximation algorithms
are consistent with Sidney’s decomposition theorem and belong to the class of algorithms
described by Chekuri et al [5]. They proved that the single-machine scheduling problem
with s/p precedence constraints is a special case of the vertex cover problem (given an
undirected graph G = (N,A), a subset C ⊆ N of nodes that minimizes the total weight
w(C) = Pj∈Cwj, for node weights wj ≥0,∀j ∈ N ).
In the last two decades, a great deal of work has been published in the scheduling
area that involves several resources working simultaneously to process jobs; and most
scheduling problem in which some jobs were processed by one machine while others were
processed by both machines simultaneously. They considered the objective of minimizing
the sum of the weighted completion times in the absence of precedence relationships.
The contribution of this paper are several. Regarding the complexity of the problem,
they use the 3-partition problem [11] (i.e., given a set S of 3n integers such that it can be partitioned into n disjoint subsets, each with 3 elements so that every subset has
exactly the same sum) to show that it is N P−complete in the strong sense. Optimality properties and a dynamic programming (DP) algorithm for the case of one two-processor
were presented. The DP algorithm finds the optimal solution in pseudo-polynomial time,
O(nT4) whereT is the sum of all processing times andnis the number of jobs. They also
claimed that the DP algorithm has a time complexityO(nT3n2+1); wheren
2(≥1) denotes
the number of jobs that require two-processors simultaneously. Heuristics methods that
can find approximate solutions efficiently were also proposed with 32-worst case error
bound.
Queyranne et al [26] considered the scheduling problem to minimize the sum of the
weighted completion times of n jobs on m identical parallel machines; where any job
j can be processed on any one of the machines, and a machine can process only one
job at-a-time. They considered both the precedence constraints and precedence delay
(i.e., if job i precede job j then job j can start after a delay, say dij time units, after
job j is finished) between jobs. They presented the best polynomial-time approximation
bounds for various scheduling problem; of which the most relevant to our problem are
the following: P m| prec.| PwjCj;P m| prec., pj = p|PwjCj;P m | prec., delay dij | P
wjCj; P m | prec., delay dij, pj = p | PwjCj; and 1 | prec., delay dij | PwjCj has worst case performance bounds of (4−2/m), (3−1/m), 4, 3 and 3; respectively.
related jobs on two resources to minimize the sum of the weighted completion times.
He used Elmaghraby’s procedure ([9]) to transform the non-s/p graph to a s/p graph.
The procedure introduce the artificial precedence relations (a.p.r.) into the precedence
graph to make it s/p graph and then reverse the relations to obtain the final sequence.
Since the reversal of the a.p.r.’s is of complexity 2m, where m is the number of a.p.r.’s;
which makes itN P−hard, a branch-and-bound approach was proposed to search in the solution space.
1.5
Organization and Outline
This thesis addresses the scheduling of precedence-constrained jobs on two resources (or
machines) in which a job may require either resource (or machine) or both, with the
objective of minimizing the total weighted completion time. In this chapter we have
presented a brief introduction to the scheduling problem of concern to us, the problem
description, the complexity of the problem and a concise review of the most relevant prior
contributions to our problem.
The remainder of the work presented in this thesis is organized as follows. In Chapter
2 we present the dynamic programming (DP) and the binary integer programming (BIP)
models while introducing the basic definitions and notation. We, first, develop and discuss
the DP model of the problem; then, formulate two BIP models of the problem, which
we label as the BIP and alternative-BIP (alt-BIP) formulations, and compare the time
taken by both the BIP and alt-BIP formulations to give an optimal solution. In Chapter
3, we present the Heuristic-DP (H-DP) algorithm that uses the DP model, discussed
in Chapter 2, to obtain feasible solutions, and illustrate H-DP algorithm with a 22-job
H-DP algorithm and use the BIP formulation to compare the results obtained. Chapter 4
summarizes the work presented in this thesis and presents the opportunities of future
Chapter 2
The Mathematical Models
In this chapter we present the two mathematical programming formulations that we
propose for the research problem of concern to us, namely,
1. the dynamic programming (DP) model, and
2. the binary integer programming (BIP) model.
We consider only the case of two resources (or machines), which are referred to as
R1 andR2; the three or more resources case may be approached in a similar fashion but
their practical solution is well beyond the capabilities of the models discussed here.
In discrete optimization problems oftentimes DP is used to obtain the solution. Since
DP is an enumerative algorithm, so in almost all cases the computational and data storage
requirements are overwhelming as the size of the problem increases, the size of the state
space becomes well beyond the capabilities of current computers (this is known as the
curse of dimensionality).
In general, the number of states in the DP approach grows exponentially in the
information. In truth, the curse of dimensionality in DP does not occur only due to the
state space; but also due to theoutput space and the action space; see the recent edition
of the book by Bellman [3] for further understanding the benefits and limitations of using
DP. Thus, generally speaking, direct application of DP is not a practical methodology
particularly for large-scale optimization problems. Hence, despite its mathematical
ele-gance and clarity, very few combinatorial optimization problems can be solved by the
direct application of the DP effectively.
We shall first present the DP formulation and then describe a method to reduce
the size of the state space. Many ingenious approaches such as Lagrange multipliers,
successive approximation, function approximation methods (e.g. neural networks, radial
basis representation, and polynomial representation) have been proposed to break the
curse of dimensionality, thus contributing diverse approximation DP methodologies to
the field of DP. Motivated by the need to address this curse of dimensionality several
researches have proposed approximations in DP. An excellent reference to learn more
about approximate dynamic programming (ADP) is the book by Powell [24].
Before presenting the DP formulation, we need to introduce some definitions and
notations, which we proceed to do.
We are given a directed acyclic digraph (dag), G= (N,A); in which each nodej ∈ N
is identified as a job, and (i, j)∈ A specifies the precedence relation between jobs i and
j; in particular, it implies that jobimust be completed before jobj can start, or in other
words, the directed path from job i to job j inG represents i≺j,∀i, j ∈ N, that is, job
i precedes job j.
Definition 2.1 (Transitive series-parallel;definition 1 in Valdes et al [30]):
The class of transitive series-parallel digraphs is defined recursively by a finite number
of applications of rules as follows:
1. A digraph G consisting of a single node, for instance, G = ({i}, φ) is transitive series-parallel.
2. If G1 and G2 are transitive series-parallel then G =G1× G2 is also transitive
series-parallel; whereN =N1∪N2, A=A1∪A2∪N1×N2.InG, i≺j, ∀i∈ N1, j ∈ N2;
that is, all nodes inG1 precedes every node ofG2; andN1×N2 refers to the directed
arcs joining the terminal nodes of G1 with the start nodes of G2. G is said to be
formed by the series composition of G1 and G2.
3. If G1 and G2 are transitive series-parallel then G =G1∪ G2 is also transitive
series-parallel; where N =N1∪ N2, A =A1∪ A2.G is said to be formed by the parallel
composition ofG1 and G2. There is no precedence relationship between nodes ofG1
and G2 inG.
Definition 2.2 (Series-parallel (s/p) digraph; definition 2 in Valdes et al [30]):
A digraph G is said to be series-parallel digraph, if and only if its transitive closure is transitive series-parallel (as described in definition 2.1).
So, the series-parallel precedence constraints are defined recursively with the base
elements as the individual jobs. Given series-parallel precedence relations by two digraphs
G1 = (N1,A1) and G2 = (N2,A2) such that N1 ∩ N2 = φ. The parallel composition of
G1 and G2 results in a partial order on N1∪ N2 that maintainsA1 and A2,but does not
introduce any additional precedence relationships. The series composition of G1 and G2
Definition 2.3 (Initial set):
The set of initial jobs, that is, those jobs with no predecessors, is called an initial set;
denoted by I ⊆ N.
Definition 2.4 (Eligible set):
The subset of jobs in initial setI available to be processed immediately on their required resources is called the eligible set; denoted byE ⊆ I ⊆ N.
For example, let I ={1,2}and 1≺2; the only job that is available for processing is job number 2, so E ={2}.
Definition 2.5 (Marginal cost):
The marginal cost of a set I, denoted byρ(I), is defined as
ρ(I) = P
j∈Iwj P
j∈Ipj
(2.1)
where wj ≥0 is theweight, or value and pj >0 is the processing time of job j,∀j.
Clearly, ρ(I) is well-defined becausepj >0,∀j.
Definition 2.6 (Compatible job pairs):
Two jobs are said to be acompatible job pairs if each of them requires a different resource
and can be processed concurrently (they have no precedence relationship).
The jobs in a compatible job pair may be processed in parallel (because they have no
precedence relationship) and can be considered as one job that requires more than one
resource at the same time. In particular, if jobsj[1] and j[2] require resources R1 and R2
respectively, then the compatible job pair, denoted by hj [2] j[1]i
given by
ρhj
[2] j[1]i
= wj[1]+wj[2] max{pj[1], pj[2]}
(2.2)
This approach of forming a compatible job pair is found useful, as is explained in
chapter 3, since it helps in reducing the state space of the DP.
Definition 2.7 (Compatible set):
The set of job pairs formed from the eligible set E, by pairing all possible compatible jobs (obtained by following definition 2.6) is called the compatible set; denoted by C.
For example, suppose that the eligible set is E ={j[1], j[2], k[2]},where jobj[1] requires
resource R1; job j[2] and job k[2] require resource R2 each. Then, the compatible set
is C = nhjj[2][1]i,hk
[2] j[1]io
; where the marginal cost of each compatible job pair can be
calculated by Eq. 2.2.
Definition 2.8 (Composite job):
Two or more jobs may be grouped together to constitute a composite job if they are
precedence related consecutively in series and they share at least one resource among
them. Their marginal cost is evaluated following Eq. 2.2.
For example, suppose that we have two jobs: j(1) and j(2), where job j(1) requires
resource R1, written as j[1](1) and job j(2) requires both resources R1 and R2, written as j[1(2),2]; then the composite job, denoted by k , j[1](1), j[1(2),2], will have a marginal cost
(using definition 2.5) given by,
ρ(k) =
wj(1) [1]
+wj(2) [1,2]
pj(1) [1]
+pj(2) [1,2]
Definition 2.9 (Directed cut, definition from Provan et al [25]):
A directed cut in a directed network; G = (N,A) with a source node s ∈ N and sink note t ∈ N, is a set of arcs of the form (N1,N2) ={(n1, n2) : n1 ∈ N1, n2 ∈ N2}; where s∈ N1 and t∈ N2 =N − N1.
Definition 2.10 (Uniformly directed cut (udc), definition from Provan et al [25]):
A uniformly directed cut is a directed cut (N1,N2) for which (N2,N1) is empty.
In words, auniformly directed cutset is a set of arcs such that each path in the network
contains exactly one arc in it.
0 A1
R1 j[1,2] j[1]
R2 j[1,2] j[2]
0 A2
Figure 2.1: The system at stage Ik
2.1
A Dynamic Programming (DP) Formulation
2.1.1
The elements of Dynamic Programming
Stage: The stage of the system is the initial set Ik (definition 2.3), in which the subscript k identifies the stage number. For example, Figure 2.1 exhibits one such
stageIk of the system; wherej[1], j[2] and j[1,2] are the jobs that needs resource R1,
resourceR2,and both resources (R1,R2), respectively.
State: At stage Ik, let s(Ik) = (A1, A2) denote the state of the system. In
and A2 represents the total time taken by all the jobs in the initial set Ik to be processed on resources R1 and R2, respectively. We need to enumerate both A1
and A2 over all possible values of their availabilities. They are bounded by alower
bound (l.b.) and anupper bound (u.b.) as follows:
X
j[1]∈Ik
pj[1] ≤A1 ≤ X
j[.]∈Ik
pj[.] (2.4)
X
j[2]∈Ik
pj[2] ≤A2 ≤ X
j[.]∈Ik
pj[.] (2.5)
where j[.] denotes those jobs that need either resource R1, or resource R2, or both
resourcesR1andR2;j[1]andj[2]are jobs that need resourceR1andR2 respectively.
Decision: From the eligible set Ek (which is a subset of the initial set Ik), there may be four different possibilities of jobs immediately available to process; they
are,
1. jobs, j[1],that require only resource R1,
2. jobs, j[2],that require only resource R2,
3. compatible jobs hj [2] j[1]i
that require resources R1 and R2,
4. jobs, j[1,2], that require both resources R1 and R2.
The decision at the stageIkis generically designated by dk,which implies to sched-ule the job(s) specified by dk.
Extremal Equations:Letf{Ik,(A1, A2)}denote the minimal cost when in stage
Ik (the initial set Ik) is scheduled to terminate at (A1, A2).
1. If the decision is to process job j[1] ∈ Ek ⊆ Ik on resource R1 that would
terminate (that is, finish) at timeA1,as shown in Figure 2.2, giving the stage
reward of wj[1]A1 for stage Ik; then the cost in stage Ik is
f{Ik,(A1, A2)}= min
j[1]∈Ek⊆Ik{
wj[1]A1 +f{Ik\{j[1]},(A 0
1, A2)}};
whereA0
1 =A1−pj[1].
0 A01 A1
R1 j[1]
R2
0 A2
Figure 2.2: At stage Ik with a decision to process job j[1]
0 A1
R1
R2 j[2]
0 A02 A2
Figure 2.3: At stage Ik with a decision to process job j[2]
2. If the decision is to process job j[2] ∈ Ek ⊆ Ik on resource R2 that would
terminate (that is, finish) at timeA2,as shown in Figure 2.3, giving the stage
reward of wj[2]A2 for stage Ik; then the cost in stage Ik is
f{Ik,(A1, A2)}= min
j[2]∈Ek⊆Ik{
wj[2]A2 +f{Ik\{j[2]},(A1, A 0
whereA0
2 =A2−pj[2].
3. If the decision is to process compatible jobs hjj[2][1]i on resources R1 and R2
that would terminate (that is, finish) job j[1] and job j[2] at time A1 and A2
respectively, as shown in the Figure 2.4, giving the stage reward of wj[1]A1+
wj[2]A2 for stageIk; then the cost in stageIk is
f{Ik,(A1, A2)}= "min
j[2] j[1]#
∈Ck
{wj[1]A1+wj[2]A2+f{Ik\{j[1], j[2]},(A 0
1, A
0
2)}};
whereA0
1 =A1−pj[1] and A
0
2 =A2−pj[2].
0 A01 A1
R1 j[1]
R2 j[2]
0 A02 A2
Figure 2.4: At stage Ik with a decision to process compatible jobs h
j[2] j[1]i
0 A1 A01 Amax
R1 j[1,2]
R2 j[1,2]
0 A02 A2
Figure 2.5: At stage Ik with a decision to process job j[1,2]
4. If the decision is to process job j[1,2] ∈ Ek ⊆ Ik on both resources R1 and R2
that would terminate (that is, finish) at time Amax= max{A1, A2}, as shown
cost in stageIk is
f{Ik,(A1, A2)}= min
j[1,2]∈Ek⊆Ik{
wj[1,2]Amax+f{Ik\{j[1,2]},(A 0
max, A
0
max)}};
whereAmax = max{A1, A2} and A0max=Amax−pj[1,2].
Hence, the minimal cost, f{Ik,(A1, A2)}, in stage Ik scheduled to terminate at (A1, A2) is given by the extremal equations given below:
f{Ik,(A1, A2)}= min
wj[1]A1+f{Ik\{j[1]},(A 0
1, A2)}, (2.6)
wj[2]A2+f{Ik\{j[2]},(A1, A 0
2)}, (2.7)
wj[1]A1+wj[2]A2+f{Ik\{j[1], j[2]},(A 0
1, A
0
2)}, (2.8) wj[1,2]Amax+f{Ik\{j[1,2]},(A
0
max, A
0
max)} (2.9)
with f{φ,(A1, A2)}= 0
whereA0
1 =A1−pj[1], A
0
2 =A2−pj[2], Amax= max{A1, A2},andA 0
max =Amax−pj[1,2].
Given a digraph G= (N,A), it is easy to find the initial set, Ik ⊆ Nk, by generating all possible uniformly directed cuts (udc‘s). Once an Ik is identified, the availability vector (A1, A2) can be calculated using Eq. 2.4 and Eq. 2.5. The computational challenge
encountered here is the problem of dimensionality of the state variable,s(Ik) = (A1, A2),
since we need to enumerate all feasible values of the vector (A1, A2) of each initial setIk. For the 22-job network given in Figure 1.1, we exhibit one such initial set with 13
jobs to get the initial setI ={1,2,3,4,5,6,8,9,10,15,16,18,19},as shown in Figure 2.6. Using Eq. 2.4 and Eq. 2.5 to calculate the l.b. and u.b., as shown in the Figure 2.6, it is
enumerated for this stage of the DP procedure. Evaluating all possible values of
availabil-ity vector (A1, A2) becomes computationally burdensome to the point of intractability; so
we need to explore a systematic procedure to reduce (or better bounding) the availability
vector (A1, A2).
1 (R1)
2 (R2)
3
(R1,R2)
4
(R1)
5 (R1,R2)
6
(R2)
8
(R1)
9
(R1,R2) 10 (R1)
16
(R1,R2) 15 (R2)
18 (R1,R2)
19
(R1)
Lower Bound,l.b.(Ai) Upper Bound,u.b.(Ai) Cardinality ofAi,|Ai|=u.b.(Ai)−l.b.(Ai) + 1
A1 54 66 13
A2 43 66 24
13×24 = 312 different vectors of (A1, A2).
2.2
New lower and upper bounds on resource
avail-ability
Let the availability of resources R1 and R2 obtained by solving the DP for Ik−1 be
denoted byA(1k−1) and A2(k−1) respectively. Then the new lower bound (nlb) and thenew upper bound (nub) of Ai’s required to solve the DP from initial set Ik are given by:
nlb(Ai) = A(k
−1)
i +
X
j[i]∈Ik\Ik−1
pj[i],∀i (2.10)
nub(Ai) = A(k
−1)
i +
X
j[.]∈Ik\Ik−1
pj[.],∀i (2.11)
where, j[i] is the job that requires resource Ri, i = 1,2; and j[.] is the job that require
one or both resources taking precedence and compatible jobs into account. Clearly, this
should reduce the vector space of resource availability (A1, A2) by a significant amount
as we are using availability information from a previously solved DP stage.
2.3
The Re-sequencing Procedure
The objective of this procedure is to correct the case in which the DP results in the
scheduling of a compatible jobs that violates some precedence relation.
Suppose that at stage Ik, the availability of resourcesR1 and R2 are A1 and A2,
re-spectively. Suppose, further, that the only decision is to process the compatible jobshj [2] j[1]i
from the eligible set Ek (definition 2.4). Then, in the next stage k+ 1; the availabilities are A0
j[1] =A1−pj[1] andA 0
k[2] k[1]
from the eligible set Ek+1(⊆ Ik+1); the application of the DP procedure will result
in the sequence shown in the Figure 2.7(b). Clearly, this is not a feasible solution because
job k[1] precedes job j[2]; so j[2] cannot be processed on resource R2 before job k[1] has
finished processing on resource R1. It is at this point that the re-sequencing procedure
0
A
0j[1]A
j[1]R
1j
[1]R
2j
[2]0
A
0j[2]A
j[2](a) The compatible job pairs
j[2] j[1]
are allocated.
0
A
0k[1]A
0j[1]A
j[1]R
1k
[1]j
[1]R
2k
[2]j
[2]0
A
0k[2]A
0j[2]A
j[2](b) The compatible job pairs
k[2] k[1]
are allocated; but
k
[1]≺
j
[2]0
A
0k[1]A
0j[1]A
j[1]R
1k
[1]j
[1]R
2k
[2]j
[2]0
A
0k[2]A
k[2]A
0j[2]A
j[2](c) Applying re-sequencing procedure on the sequence in (b).
Let the final sequence of jobs generated after the completion of the DP procedure be
denoted by Υ, which is used as an input to the re-sequencing procedure to get a feasible
and better solution.
1. Initialize a sequence, denoted by Ω,with no jobs; that is, Ω ={φ}.The correspond-ing availability vector on resourcesR1 and R2 is (A1, A2) = (0,0).
2. Allocate one-by-one jobs (this include jobs that require only one resource Ri, i= 1,2 or both resources (R1,R2)) or compatible jobs as sequenced in Υ to resources
R1 and R2 by considering precedence relationship, and append those job(s) to
the sequence Ω accordingly. At each step, calculate the availability vector (A1, A2)
based on the precedence relationship.
3. Use the availability vector (A1, A2) to calculate the completion time of each job j,
denoted by Cj; which is the sum of starting time and processing time of job. The
completion time, Cj,is used to obtain the total weighted completion time.
For example, suppose the final sequence (Υ) of jobs generated after the completion
of the DP procedure is shown in Figure 2.7 (b). By applying there-sequencing procedure
to Figure 2.7 (b), in the final feasible sequence (Ω), job j[2] starts on resource R2 only
after job k[1] has finished processing on R1, as shown in Figure 2.7 (c).
2.4
A Binary Integer Programming (BIP)
Formula-tion
LetA={< j, j0 >|j, j0 ∈ N }be the set of pairs of jobs related by immediate
N, N[2] ⊆ N and N[1,2] ⊆ N respectively.
Also, let the upper bound ofcompletion time of the last job beTmax,which is the sum
of processing time of all jobs, that is,Tmax=Pj∈N pj. The minimum processing time of
all jobs in N is denoted bypmin = minj∈N{pj}.
Let xjt be a binary variables, for j ∈ N and t ∈[0, Tmax−pmin], such that
xjt =
1 if job j starts at time t,
0 otherwise.
(2.12)
Also, let Cj be the completion time of job j,∀j ∈ N.
The binary integer programming (BIP) formulation for the problem is as follows:
z = minX
j∈N
wjCj (2.13)
subject to
1. a job j ∈ N must start at some time t∈[0, Tmax−pmin]:
TmaxX−pmin t=0
xjt = 1 (2.14)
2. the completion time of job j is the sum of its start time at t and the processing
time pj:
Cj =
TmaxX−pmin t=0
(t+pj)·xjt (2.15)
only after job j1 is finished:
Cj1 ≤Cj2 −pj2 (2.16)
4. for all pairs, < j1, j2 > /∈ A and < j2, j1 > /∈ A,∀j1 ∈ N[1,2] and j2 ∈ N(j1 6=j2) :
Either, a job j1 requiring both resources (R1,R2) must be finished before job j2
can be processed:
Cj1 ≤Cj2 −pj2 (2.17)
Or, a job j2 must be finished before job j1 that require both resources (R1,R2)
can be processed:
Cj2 ≤Cj1 −pj1 (2.18)
5. for all pairs, < j1, j2 > /∈ A and < j2, j1 > /∈ A,∀j1, j2 ∈ N[i](j1 6=j2) :
Either, a job j1 requiring resource Ri must be finished before any job j2 can be
processed on the same resource Ri :
Cj1 ≤Cj2 −pj2 (2.19)
Or, a job j2 must be finished before jobj1 requiring resourceRi can be processed:
Cj2 ≤Cj1 −pj1 (2.20)
6. binary variable conditions:
xjt ∈ {0,1} (2.21)
Note. CPLEX gives the functionality to model Either-Or constraints; for example,
described above, without having to reformulate BIP into standard MIP (Mixed Integer
Programming) formulation.
In the standard MIP formulation for BIP model described above, we rewrite Equations
(2.17); (2.18); (2.19); and (2.20) as follows.
Letyj1j2 be an indicator variable such that
yj1j2 =
1 if Eq. 2.17 is constraining and Eq. 2.18 is always satisfied,
0 otherwise, i.e., Eq. 2.18 is constraining and Eq. 2.17 is always satisfied. (2.22)
Cj1 ≤Cj2 −pj2 +M ·(1−yj1j2) (2.23)
Cj2 ≤Cj1 −pj1 +M ·yj1j2 (2.24)
where, M =Tmax.
Similarly, letyj1j2 be an indicator variable such that
yj1j2 =
1 if Eq. 2.19 is constraining and Eq. 2.20 is always satisfied,
0 otherwise, i.e., Eq. 2.20 is constraining and Eq. 2.19 is always satisfied. (2.25)
Cj2 ≤Cj1 −pj1 +M ·yj1j2 (2.27)
where, M =Tmax.
Note. The total number of binary decision variable,xjt,of this BIP model forn jobs will be [n(Tmax−pmin) +n]; which depends on the processing time of jobs. If the processing
time of every jobsj is multiplied with a factor of 10; the total number of binary decision
variable will increase by [9n(Tmax−pmin)].
The BIP formulation described above is one way of formulating the problem. We will,
also, introduce an alternative BIP (alt-BIP) formulation and compare the time taken to
obtain the optimal solutions by the BIP and the alt-BIP formulations in the Table 2.1.
The objective function (minPwjCj), the decision variables (xjt) and some of the
constraints (Eq. 2.14, Eq. 2.15, Eq. 2.16, and Eq. 2.21) of the BIP formulation will also
be the objective function, the decision variables and constraints of the alt-BIP
formula-tion. Hence, to avoid the repetition we will only present the constraints of the alt-BIP
formulation that differs from the BIP formulation; that is, only those constraints that
corresponds to the item numbers 4 and 5 of the BIP formulation (the constraints - either
Eq. 2.17 or Eq. 2.18, and either Eq. 2.19 or Eq. 2.20):
4. for all pairs, < j1, j2 > /∈ A and < j2, j1 > /∈ A,∀j1 ∈ N[1,2] and j2 ∈ N(j1 6=j2) :
Either, a job j1 requiring both resources (R1,R2) must be finished before job j2
can be processed:
t1xj1t1 +pj1 ≤t2xj2t2 +Tmax(1−xj2t2),∀t1, t2 (2.28)
can be processed:
t2xj2t2 +pj2 ≤t1xj1t1 +Tmax(1−xj1t1),∀t1, t2 (2.29)
5. for all pairs, < j1, j2 > /∈ A and < j2, j1 > /∈ A,∀j1, j2 ∈ N[i](j1 6=j2) :
Either, a job j1 requiring resource Ri must be finished before any job j2 can be
processed on the same resource Ri :
t1xj1t1 +pj1 ≤t2xj2t2 +Tmax(1−xj2t2),∀t1, t2 (2.30)
Or, a job j2 must be finished before jobj1 requiring resourceRi can be processed:
t2xj2t2 +pj2 ≤t1xj1t1 +Tmax(1−xj1t1),∀t1, t2 (2.31)
Similar to the BIP formulation, the constraints either (2.28) or (2.29); and either
(2.30) or (2.31) of the alt-BIP formulation can be rewritten as follows:
Letyj1j2 be an indicator variable such that
yj1j2 =
1 if Eq. 2.28 is constraining and Eq. 2.29 is always satisfied,
0 otherwise, i.e., Eq. 2.29 is constraining and Eq. 2.28 is always satisfied. (2.32)
t2xj2t2+pj2 ≤t1xj1t1 +Tmax(1−xj1t1) +Tmaxyj1j2,∀t1, t2 (2.34)
Similarly,
yj1j2 =
1 if Eq. 2.30 is constraining and Eq. 2.31 is always satisfied,
0 otherwise, i.e., Eq. 2.31 is constraining and Eq. 2.30 is always satisfied. (2.35)
t1xj1t1 +pj1 ≤t2xj2t2 +Tmax(1−xj2t2) +Tmax(1−yj1j2),∀t1, t2 (2.36)
t2xj2t2+pj2 ≤t1xj1t1 +Tmax(1−xj1t1) +Tmaxyj1j2,∀t1, t2 (2.37)
We solved the five instances of 6-job network (Figure A.1 (i)) with the BIP and
alt-BIP formulations to see the time it takes to give an optimal solution; Table 2.1 shows
the time performance comparison between them. The alt-BIP formulation takes more
time to obtain an optimal solution compared to the BIP formulation. Since, the alt-BIP
has large number of constraints (corresponding to the item numbers 4 and 5, that is,
constraints either Eq. 2.33 or Eq. 2.34; and either Eq. 2.36 or Eq. 2.37 ) compared to the
BIP formulation; which leads to sparse matrix.
Table 2.1 shows that CPLEX takes much longer amounts of computational time for
the alt-BIP formulations due to the sparsity of matrix. It is possible to resolve the issue of
sparse matrix by applying theDelayed Column generation or the Dantzig Wolfe
decom-position, or theBender’s Decomposition technique; however, in this research work we are
Table 2.1: Comparison between the BIP and alt-BIP formulations
Network Objective function value Time (in seconds)
Instance BIP alt-BIP BIP alt-BIP
I.6.1 654 654 0.23 3.95
I.6.2 489 489 0.23 0.59
I.6.3 567 567 0.23 5.36
I.6.4 303 303 0.27 1.17
I.6.5 925 925 0.29 14.73
Since, we observe that the computation time is less for the BIP formulation compared
to the alt-BIP formulation; so we use the BIP formulation to compare the results achieved
Chapter 3
The Heuristic-DP Algorithm
In this chapter we will first define the relevant terms such as thejob module and thebinary
decomposition tree; then, present theSeries-parallel Composition procedure which is used
to generate the initial setsIk(definition 2.3). We will, then, summarize the steps involved in obtaining the solution to the problem by the DP model into one algorithm, which we
call it as theHeuristic-DP (H-DP) algorithm. We briefly show, with an example of 22-job
network, the steps involved in the H-DP algorithm to obtain the solution. Finally, we will
perform experiments by taking various instances of different problem sizes and discuss
the results in Section 3.5.
Definition 3.1 (Module; definition 1 in Lawler [17]):
Let M be a subset of N. A nonempty subset M is a (job) module if, for each job
j ∈ N −M, exactly one of the following three conditions holds:
1. j ≺k, ∀k∈M, that is,j must precede every job inM;
2. j k, ∀k∈M, that is,j must follow every job inM;
Definition 3.2 (Binary decomposition tree (BDT)):
Given a series-parallel digraph G, a binary decomposition tree (BDT) of G, is a rooted binary tree obtained by repeatedly applying rules of transitive closure onG,as described in the definition 2.2, to decomposing G into series-parallel components. Each internal node of the BDT has at most two descendants (hence the binary in the name).
Each leaf of the BDT is identified with a node of G.Each internal node is marked ‘S’ indicating the series composition of the subgraphs identified with its two descendants,
with the convention that the left descendant precedes the right one. Each internal node
marked ‘P’ indicates the parallel composition of the subgraphs identified with its two
descendants. The subscripting in ‘S0s’ and ‘P0s’ are to facilitate reference for creating
modules as detailed later.
In the paper by Valdes et al [30], a procedure is described to determined if a digraph
G is series-parallel and, if it is, the procedure to obtain its BDT. This task can be accomplished on O(m +n) running time, where m is the number of arcs and n the number of nodes of G. Hence, we shall always have a BDT for a given series-parallel precedence constraints.
3.1
The Procedure Based on the BDT
The series composition procedure described here emulates the algorithm described in
Lawler’s paper [17] for finding an optimal sequence for a moduleM by series composition
from previously determined optimal sequences for its descendants,M1 andM2. But in the
parallel composition procedure, a slight modification is considered to form a compatible
job (as defined in definition 2.6) whenever feasible.
each module M from the previously determined sequences of its descendants, M1 and
M2. At the end of the procedure, the module M is arranged in non-increasing order of
ratios ρ (definition 2.5).
3.1.1
Series Composition
Step 0: Assume thatM1 contains a dummy element,d1; with marginal cost,ρ(d1) = +∞;
and that M2 contains a dummy element, d2; with marginal cost, ρ(d2) = −∞. The
assumption of dummy elements is required to avoid the test for emptiness in the steps
that follow.
Step 1: Take the minimal element i∗ from M
1 (which must be the last element, by
construction) and the maximal element j∗ fromM
2 (which must be the first element, by
construction).
Step 1.1: If ρ(i∗)> ρ(j∗), then formM =M
1∪M2 such thati≺j, ∀i∈M1 ⊆M
and ∀j ∈M2 ⊆M; that is, the moduleM1 precedes the module M2 in the module
M. Stop the algorithm and exit.
Step 1.2: Else (i.e., ρ(i∗)≤ρ(j∗)) remove i∗ from M
1; i.e., M1 ←M1\{i∗}, and j∗
from M2; i.e., M2 ←M2\{j∗}, to form the composite job pair k ←(i∗, j∗). Go to
Step 2.
Step 2: Take the minimal element i∗ fromM
1, which is the last element, by
construc-tion.
Step 2.1: If ρ(i∗) > ρ(k), in which job k is the one formed in Step 1, then go to
Step 2.2: Else (i.e.,ρ(i∗)
≤ρ(k)) removei∗ fromM
1; i.e.,M1 ←M1\{i∗},and form
the composite job pair k←(i∗, k); then go to Step 2.
Step 3: Take the maximal element j∗ from M
2, which is the first element, by
con-struction.
Step 3.1: If ρ(k) > ρ(j∗), in which job k is the one formed in Step 2, then form
M =M1∪ {k} ∪M2 such that i≺k ≺ j, ∀i∈M1 ⊆M and ∀j ∈M2 ⊆M; that
is, the module M1 precedes the job k which then precedes the module M2 in the
module M. Stop the algorithm and exit.
Step 3.2: Else (i.e., ρ(k) ≤ ρ(j∗)) remove j∗ from M
2; i.e., M2 ← M2\{j∗}, and
form the composite job pair k ←(k, j∗); then go to Step 2.
At the end of series composition procedure the module M is a sequence obtained by
listing the jobs, arranged by non-increasing order of ratios,ρ(definition 2.5). The dummy
elements d1 and d2 are removed from the final module M.
Figure 3.1 show the series composition procedure described above in a flowchart
rep-resentation
Note. Eitheri∗, orj∗, or both may, by themselves, be composite jobs; so the composite
job, k, represents a sequence formed by joining together the two sequences represented
byi∗ and j∗.
3.1.2
Parallel Composition
For parallel composition of job modulesM1 andM2, arrange the elements of M1 and M2
Start
Let d1 ∈ M1 andd2 ∈ M2; whereρ(d1) = +∞and ρ(d2) =−∞
(Step 0)
Leti∗ = arg min
i∈M1ρ(i)
andj∗ = arg max
j∈M2ρ(j).
(Step 1)
Is ρ(i∗)> ρ(j∗)
?
(Step 1.1)
M1 ← M1\{i∗}andM2 ← M2\{j∗}
Form the composite pair,k ←(i∗, j∗) (Step 1.2)
i∗ = arg min
i∈M1ρ(i)
(Step 2)
M1 ← M1\{i∗} Form the composite
pair,k ← (i∗, k)
(Step 2.2)
Is ρ(i∗) > ρ(k)
?
(Step 2.1)
j∗ = arg max
j∈M2ρ(j)
(Step 3)
Is ρ(k)> ρ(j∗)
?
(Step 3.1)
M = M1∪M2
(Step 1.1)
M =M1∪ {k} ∪M2
(Step 3.1)
M2 ← M2\{j∗} Form the composite
pair,k ← (k, j∗)
(Step 3.2) Stop No Yes No Yes No Yes
assuming that feasibility is true for M1 and M2 individually. For the job pair j[1] and j[2]
form a compatible job,hj [2] j[1]i
, if it is feasible.
Later in this chapter the need to form compatible jobs will make more sense;
essen-tially, this operation helps in reducing the state space of the DP model.
3.2
The Heuristic-DP (H-DP) Algorithm
Given an acyclic series-parallel (s/p) digraph G,
Step 1: Form the BDT for G using the definition 3.2.
Step 2: Apply the Series-parallel Composition Procedure, described in the Section 3.1, to the BDT to obtained amodule arranged in non-increasingρ (definition 2.5).
Step 3: Use the DP model explained in section 2.1 to secure the preliminary se-quence of the jobs inG.
Step 4: Apply the Re-sequencing procedure, describe in the Section 2.3, to obtain the availability vector (A1, A2) and the total weighted completion time.
Figure 3.2 shows the H-DP algorithm described above in flowchart representation.
3.3
An Example of the H-DP Algorithm
Start
Given, a series-parallel digraph,
G
Form the BDT from
G
,
by using definition 3.2
Apply the series-parallel
com-position procedure, described
in the Section 3.1, to obtain a
module,
M
=
{
I
1, I
2, . . . , I
m}
•
Let p = 1.
•
Form the initial set,
I
=
I
1.
•
Calculate the availability vector
{
A
1, A
2}
, by using Eq. 2.4 and
Eq. 2.5.
Apply the DP model, described in
the Section 2.1, on the initial set
I
•
Form the initial set,
I
=
Ppi=1I
i.
•
Calculate the availability
vector
{
A
1, A
2}
,
by using Eq.
2.10 and Eq. 2.11.
Is
p
≤
m
?
p
=
p
+ 1
Apply the Re-sequencing procedure,
described in the Section 2.1.3, on the
sequence obtained by the DP model
Stop
Yes
No
S21
1 S20
P19
S12
P9
S3
S2
4 P1
8 9
16
S8
P4
2 3
S7
P6
S5
5 10 6
15
P11
P10
18 19
20
S18
S16
7 S15
P13
11 12
P14
13 14
S17
17 21
22
Applying the Series-parallel Combination procedure, described in the section 3.1, we
finally get a module M21 = {I1, I2, I3, I4}, (see the steps to obtain M21 in Appendix C)
where
I1 = (1,7,3), I2 = (2,6), I3 =
h
12
11i
,
I4 =
4,8,9,16,5,10,15,h2019i,18,14,13,17,21,22
with ratios ρ(I1) = 2.75, ρ(I2) = 2.2, ρ(I3) = 1.625, ρ(I4) = 0.775.
Now, the module M21 is partitioned into subsets Sk = ∪ki=1Ii, ∀k; which is used as the initial set to start the DP procedure (described in the section 2.1).
1. The initial set isI1 =I1 ={1,7,3}with the final availability vector (A1, A2) having
nlb(A1) = 1 + 2 + 1 = 4,nub(A1) = 1 + 2 + 1 = 4
nlb(A2) = 0 + 2 + 1 = 3,nub(A2) = 1 + 2 + 1 = 4
The extremal equation of the DP is
f1 =f{I1,(A1, A2)}= min
d {wdAd+f{I1\{d},(A
0
1, A
0
2)}}
Solving the extremal equation and applying the re-sequencing procedure results
in the sequence of processing jobs, {1,7,3}, as shown in Figure 3.4(a) and its availability vectorA∗
1 = 4 andA∗2 = 4 with the objective function value f1 = 34.
2. The initial set is I2 = I1 ∪ I2 = {1,7,3,2,6} with the final availability vector
(A1, A2) having
nlb(A1) = A∗1+ 0 = 4,nub(A1) =A∗1+ 4 + 1 = 4 + 5 = 9
The extremal equation of the DP is
f2 =f{I2,(A1, A2)}= min
d {wdCd+f{I2\{d},(A
0
1, A
0
2)}}
Solving the extremal equation and applying the re-sequencing procedure, one can
obtain the sequence of processing jobs,{1,7,3,2,6},as shown in Figure 3.4(b) and its availability vectorA∗
1 = 4 andA∗2 = 9 with the objective function valuef2 = 132.
3. The initial set is I3 = I1∪I2∪I3 = {1,7,3,2,6,11,12} and the final availability
vector (A1, A2) having
nlb(A1) = A∗1+ 8 = 4 + 8 = 12, nub(A1) = A∗1+ 8 = 4 + 8 = 12
nlb(A2) = A∗2+ 2 = 9 + 2 = 11, nub(A2) = A∗2+ 8 = 9 + 8 = 17,
because compatible job pair,h1211ischeduled at the same time sopj = max{p11, p12}=
8.
The extremal equation of the DP is
f3 =f{I3,(A1, A2)}= min
d {wdCd+f{I3\{d},(A
0
1, A
0
2)}}
Solving the extremal equation and applying the re-sequencing procedure, one can
obtain the sequence of processing jobs, n
1,7,3,12,2,h116 io, as shown in Figure 3.4(c) and its availabilities A∗
1 = 12 and A∗
2 = 11 with the objective function value f3 = 256.

![Figure 2.2: At stage Ik with a decision to process job j[1]](https://thumb-us.123doks.com/thumbv2/123dok_us/1688621.1213339/32.612.171.471.374.476/figure-stage-ik-decision-process-job-j.webp)
![Figure 2.5: At stage Ik with a decision to process job j[1,2]](https://thumb-us.123doks.com/thumbv2/123dok_us/1688621.1213339/33.612.158.502.274.567/figure-stage-ik-decision-process-job-j.webp)