Jaramillo, Juan Jos´e. Numerical Algorithm for Model Reduction of Linear
Sys-tems with Polytopic Uncertainties. (Under the direction of Dr. Fen Wu).
In this thesis, we study a H∞ optimal model reduction for polytopic uncertain linear system. The polytopic system has its state-space data contained in a convex
poly-tope, a situation that often arises. The problem we are trying to solve is to find a
lower order polytopic uncertain linear system with a guaranteed H∞ norm error. A sufficient solvability condition is provided in terms of LMIs with one extra coupling
rank constraint, which generally leads to a non-convex feasibility problem. To deal
with this problem a Cone Complementarity Algorithm with local convergence is used.
As an extension a Weighted Model reduction method is proposed for polytopic
uncertain linear systems. This method allows us to get a reduced order polytope that
approximate the original system, for a frequency range that is predefined by input
and output weighting functions. The solvability conditions are also provided in terms
of LMIs with an extra coupling rank constraint. The cone complementarity algorithm
OF LINEAR SYSTEMS WITH POLYTOPIC
UNCERTAINTIES
by
Juan J. Jaramillo
a thesis submitted to the graduate faculty of
north carolina state university
in partial fulfillment of the
requirements for the degree of
master of science
department of mechanical and aerospace engineering
raleigh
January 2002
approved by:
To my aunt
Olga
and my parents
Jos´e Ra´ul and Ana Isabel
Juan Jaramillo was born on May 22, 1975 in Medell´in, Colombia where he grew up
with his parents and his younger sister Maria Isabel. After a successful career as
a pole vaulter, he was admitted to the National University of Colombia and earned
a Bachelor of Engineering degree in Mechanical Engineering in February 1998. His
thesis work was sponsored by FESTO Inc. and consisted of the fully automation of
a press punch. After graduation he participated in several automation projects, such
experience encouraged him to broaden his knowledge in the area of of control and
dynamics. He then left his country to pursue a Masters degree at North Carolina
State University in spring 2000. His research in model reduction under the direction
of Professor Fen Wu is summarized in the present work.
First of all I would like to thank my advisor and mentor Dr Fen Wu for all his support
throughout the research, for broadening my knowledge in robust control and for his
generous financial support.
I am also thankful to Dr. Paul Ro and Dr. Larry Silverberg, members of my
gradu-ate committee for instilling me in the basics of control engineering and mechatronics
design through the courses I had taken under them.
I take this opportunity to thank the Mechanical Engineering Department and its staff
for their wonderful support.
I would like to thank Ege, Marco and Soheil for sharing the painful moments of chaos
and confusion. I’m also deeply indebted to my friend Lucas for his infinite patience
and support.
Finally, I would like to express my gratitude to Philip Nye and Mildred Echandi for
making this dream possible.
List of Tables vii
List of Figures viii
List of Symbols ix
Acronyms x
1 Introduction 1
1.1 Background . . . 2
1.2 Model Reduction . . . 2
1.3 Scope and Contributions . . . 7
1.4 Thesis Outline . . . 7
2 Mathematical Preliminaries 9 2.1 Elimination Lemma . . . 9
2.2 Schur Complement . . . 10
2.3 Bounded Real Lemma . . . 10
3 Model Reduction Methods 12 3.1 Polytopic Model Reduction Problem and Solvability Condition . . . . 12
3.2 Lower and Upper Bounds for γopt . . . 15
3.3 Computational Scheme Based on Cone Complementarity Algorithm . 17 3.4 Computational Scheme Based on Alternating Projection Algorithm . 19 3.5 Comparison Between CCA and APA . . . 22
3.6 Comparison Between CCA and Balanced Truncation Method . . . 27
3.6.1 Description of the Balanced Truncation Method . . . 27
3.6.2 Counter Example . . . 28
4 Frequency Weighted Optimal H∞ Model Reduction Method 33
4.1 Background . . . 33
4.2 Problem Definition . . . 34
4.3 Illustrative Example . . . 39
4.3.1 Case 1 . . . 39
4.3.2 Case 2 . . . 42
5 Conclusions 45
List of References 47
A Proof of theorem 3 52
3.1 Performance comparison between CCA and APA . . . 22 3.2 Numerical experiments . . . 26
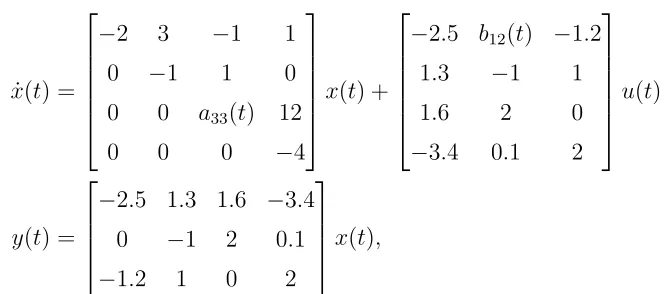
3.1 The second order approximation errors at vertices using cone comple-mentarity algorithm. The dashed line represent γr,2 . . . . 24
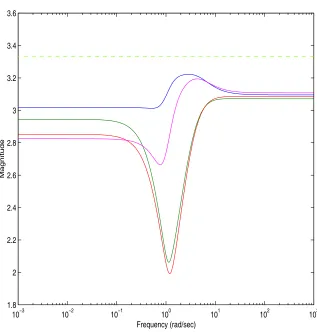
3.2 The second order approximation errors at vertices using alternating projection method. The dashed line representγr,2 . . . . 25
3.3 The second order approximation errors at vertices using CCA. The dashed line representγr,2 . . . 29 3.4 The second order approximation errors at vertices using Balanced
trun-cation method. The dashed line represent Ni=r+1σi . . . 30 3.5 The second order approximation error for Tα1 . . .Tα4 using CCA, the
dashed line representsγr,2 . . . . 31
3.6 The second order approximation error for Tα1 . . .Tα4 using APA, the
dotted line representsNi=r+1σi and the dashed line represents γr,2 . 31 4.1 Effect of the weighting function for a cross over frequency of α= 10 . 40 4.2 Comparison of the frequency responses of the original system and the
CCA and WCCA approximations for nr = 2 and α= 10 . . . 41 4.3 2th order error comparison for CCA and WCCA methods (case 1) . . 41 4.4 Effect of the weighting function for a cross over frequency of α= 100 42 4.5 Comparison of the frequency responses of the original system and the
CCA and WCCA approximations for nr = 4 and α= 100 . . . 43 4.6 4th order error comparison for CCA and WCCA methods (case 2) . . 43
L2 The space of square integrable functions on [0,∞)
MT the transpose of M Rm×n the set of real
R+ non-negative real numbers
Rm×n the set of realm×n matrices
Sn×n the set of real, symmetric n×n matrices u2 For anyu∈ L2 u2
∆
=0∞uT(t)u(t)dt12
x Forx∈Rn, x= (xTx)12
RH∞ the set of proper, asymptotically stable, rational transfer functions
deg(G) the McMillan degree of transfer functionG
APA alternating projection algorithm
CCA cone complementarity algorithm
MIMO multiple input multiple output sytem
LFT linear fractional transformation
LMI linear matrix inequality
LTI linear time-invariant
LTV linear time-varying
LPV linear parameter-varying
SISO single input single output system
SVD singular value decomposition
WCCA weighted cone complementarity algorithm
Introduction
The underlying motivation of this thesis is the H∞ optimal model reduction problem for polytopic uncertain linear systems. Very often the process of physical systems
leads to high dimensional uncertain state-space models. It is desirable to reduce
the model complexity and at the same time obtained an accurate approximation
of the original system. Existing techniques such as balanced truncation[7, 12] or
optimal Hankel norm model reduction [12], are widely used to reduce the order of the
state-space realization of Linear Time Invariant (LTI) systems, but comparatively
little work has been reported for the model reduction of uncertain systems. The
objective of this thesis is to develop an algorithm for Model Reduction using the
Linear Matrix Inequality (LMI) toolbox in MATLAB, based on the model reduction
procedure proposed by El Ghaoui [16]. This algorithm can be extended to weighted
model reduction applied to uncertain polytopic systems.
In this introductory chapter we provide background material, an overview of the
scope and contributions of this thesis and a guide to its organization by chapters.
1.1
Background
One of the most important subjects in science and engineering is the modeling of
complex dynamical systems. For controls engineers the choice of a suitable
mathe-matical formulation for the system of interest is crucial for the control law design.
For most of the systems, the underlying physics is known and hence a mathematical
model can be applied to mimic the system behaviour in a very reliable way.
The main problem of this approach is that very often the model is too complicated
to be useful for its intended application, the consequences of a highly complicated
model are difficulties in controller synthesis and an excessive computational burden
on software and hardware used for simulation and control. One way to avoid this
inconvenience is to make approximations to the model, based on physical and
math-ematical analysis, this will lead to a simpler model from the original system. This
procedure is generally referred to as model reduction.
It is important to separate the model reduction proposed in this thesis from
sim-plification based merely on physical consideration (such as eliminating the terms
describing conductive effects in a heat transfer problem where radiative effects are
dominant). These kind of actions falls within the realm of modeling, rather than
model reduction. Also, there are situations in control engineering such as
redundan-cies (non-minimal realizations) and symmetries, again, we assume the redundanredundan-cies
in the model have already been eliminated as the starting point for reduction.
1.2
Model Reduction
A mathematical model has two basic attributes: fidelity and complexity. The first one
is also called correctness and refers to its capability to predict the behaviour of the
system being modeled. It can also be thought as the degree to which characteristics
of the physical system are reflected by the model. Complexity is given roughly by
attributes. Approximations resulting in a complexity reduction necessarily degrade
fidelity and vice-versa.
As mentioned before, the advantages of a low complexity are clear, it allows
an easier understanding of model dynamics and simplifies the controller synthesis.
By reducing the computational burden an easier computer simulation, faster control
algorithms, and more reliable controller hardware and software implementation is
achieved, since there are fewer sources of potential failure.
The main objective of model reduction study is then, finding a systematic
method-ology within a given mathematical framework to produce an efficient or optimal
trade-off of fidelity vs complexity. By efficiency and optimality, respectively, we mean
rel-atively fare and the smallest possible degradation in fidelity for a given complexity
reduction. Thus, the procedure should quantify the effect of a given approximation
on fidelity in some meaningful way. Guaranteed error bounds are desirable measure
of that. Because of its close relation with robust control specifications,H∞ norm is a meaningful measure of the distance between two systems, in other words the fidelity of
the approximation is measured by taking theH∞ norm of the difference between the original model and the reduced order model. It is the designer’s criteria to choose the
degree of reduction based on considerations for the particular application of interest.
Considerable work has been devoted to model reduction for finite-dimensional
linear time-invariant (LTI) systems, dating back to the 1960s (see [9] for a complete
list of references through 1976). These efforts generally fall into the categories of
polynomial approximations in the frequency-domain, state-space transformation and
component truncation in the time-domain, and parametric optimization techniques
([25] for a complete overview). Some of these are motivated by and designed for a
particular application. For example, modal analysis (see, e.g., [29]) is mainly used as
a tool for reducing the complexity of linear lightly damped mechanical systems (e.g.,
[26]). An LTI state-space method of general importance and applicability is balanced
LTI systems. In this method, a system is transformed to balanced form, which means
that it is equally controllable and observable. The states of a balanced realization can
be ranked according to their influence on the input-to-output behavior of the system,
as measured by its input-to-output gain, or Hankel singular value. For LTI systems,
balancing is strongly related to the Proper Orthogonal Decomposition (POD), in the
sense that the basis for the balancing coordinate transformation can be derived using
principal components generated via injection of impulsive inputs.
During the 1980s and 1990s, various versions of balanced truncation and other
Hankel- norm based methods (e.g., [[6],[12], [32]]) were developed for finite- and
infinite- dimensional LTI systems. Concurrently, there was a substantial effort
to-ward development of algorithms and computational tools (e.g., [[2], [38]]) for
practi-cal implementation of linear balancing, resulting in its wide application to produce
low-order models for LTI control systems. The main objects of importance in
lin-ear balanced truncation are the controllability and observability Gramian matrices.
The computational tools are based mainly on well known and efficient algorithms for
matrix algebra problems.
Despite all the research in the area of model reduction for LTI systems,
com-paratively little work has been reported in the area of model reduction of uncertain
systems. Recently this subject has received considerable attention. Kavranoˇglu and Bettayeb [23] provided an optimal solution by embedding a given system into an
all-pass system with smallest possible H∞ norm. The computational aspect of this procedure is still an open question except for some special cases. On the other hand, a
necessary and sufficient optimality condition based on linear matrix inequality (LMI)
machinery was derived by Helmersson [18] and Grigoriadis [16]. This result
origi-nates from the H∞ control perspective and leads to a non-convex feasibility problem in general. Numerical techniques, such as a two-step iterative scheme or alternating
projection algorithm (see [40]) , are applicable for the computation of local solutions
This thesis deals with H∞ optimal model reduction within the framework of continuous-time control systems, as a complement to the model reduction results for
Linear Fractional Transformation (LFT)-type uncertain systems, our work presents
a model reduction technique for polytopic uncertain linear systems specifically with
polytopic uncertain systems. The state-space data of a polytopic uncertain system
evolve in a convex polytope, which is completely described by its vertices. Polytopic
uncertain system descriptions are useful because of their simple uncertainty
descrip-tion and natural connecdescrip-tion to finite set modeling strategies (see e.g., Boyd [37] and
Apkarian [33]), a more detailed mathematical description of these type of systems
is presented in Section 3.1). It is a fact that traditional methods used for model
reduction of LTI systems can not be applied in the model reduction of LTV systems,
those methods provide H∞ norm approximation error bounds, but leave the optimal H∞ norm model reduction problem unsolved. Our objective is to approximate such a system by a lower order polytopic uncertain system with a guaranteed induced L2
norm error. A naive approach to this problem would be to approximate each vertex
separately and then construct a reduced-order polytopic uncertain system as a convex
combination of the lower order vertices. It can be shown easily by a counter-example
(see section 3.6.2) that the reduced-order system obtained from this approach may
have an arbitrarily large approximation error.
The model reduction problem for polytopic uncertain linear systems will be solved
using the Bounded Real Lemma, in contrast to the approach of Beck [5]. As a result,
the solvability condition will involve only one non-convex rank constraint. By finding
a common Lyapunov function for all the vertices of the original polytope, the
worst-case approximation error of any LTV system within the polytope is guaranteed to be
less than a pre-specified level γ. According to this thesis there exist a reduced order model that solves theγ-suboptimal H∞ model reduction problem if three Linear Ma-trix inequalities (LMI’s) constraints plus a rank condition are satisfied. The solution
to the first three constraints can be easily found using the MATLAB LMI lab toolbox
approach. There are different ways to deal with the non convex constraint, Karolos
Grigoriadis proposed a numerical algorithm based on alternating projections ([16]),
the main drawback of this approach is that it could be computationally expensive
and not capable to handle high dimensional systems. A different approach consist
in associating the rank constraint with the minimization of the trace function, this
approach is called Cone Complementarity, as it is an extension of linear
complemen-tarity problems to the cone of positive semi-definite matrices (see [42],[28],[41]). To
solve such a problem, a linearization method originally proposed by Franke and Wolfe
and described in [28] can be used. The previous linearization algorithm was proposed
by El Ghaoui [10] to find a reduced order controller for static output feedback and
related problems. One of the objectives of this thesis is to adapt the Cone
Comple-mentarity Algorithm (CCA) to handle the rank constraint of the model reduction
problem. It was found that the objective function can be linearized in this way and
is computationally less expensive than the Alternating Projection method.
A comparison between the alternating projection method and the cone
comple-mentarity method, as well as a detailed description of the algorithms can be found in
Chapter 3.
The objective function can be linearized and is computationally less expensive
than the alternating projection algorithm. The purpose of this thesis is to adapt
the Cone Complementarity Algorithm to handle the rank constraint of the model
reduction problem proposed in [16] and show its advantages for H∞ model reduction problem.
After the fixed γproblem has been solved, the next step is to solve the suboptimal H∞ model reduction problem; minimizing the error bound under the four LMI con-straints aforementioned does this. Finally a realization for the reduced order model
1.3
Scope and Contributions
We list here the main contribution of this thesis.
• We developed a useful method to deal with the non-convex constraint of the uncertain polytopic model reduction problem using the Cone
Com-plementarity Algorithm.
• We extended the previous result to weighted model reduction of uncertain polytopic systems.
• A comparison between the resulting algorithm and existing model reduc-tion methods has been conducted and it’s efficacy is measured through
the H∞ error bound and the computational time.
• We made a comparison between the unweighted and weighted algorithms, to show the effectiveness of the second one to approximate the original
system within a given frequency bandwidth.
1.4
Thesis Outline
The material presented in this thesis is reasonably self contained. It is organized by
chapters as follows.
Chapter 1 A general overview of model reduction is presented and some of the
differences between the methods are exposed, to give the reader an idea about
the need for a new model reduction method for uncertain polytopic systems.
Chapter 2 The mathematical preliminaries necessary for working with the main
topics of this thesis are provided in this chapter.
Chapter 3 We introduce the computational schemes for Cone Complementarity and
Alternating Projections Algorithms as well as a comparison between the two
traditional model reduction method when it’s applied to uncertain polytopic
system.
Chapter 4 The weighted model reduction result using LMI machinery is presented.
Since the solvability condition of this problem involves a rank constraint
(non-convex) the Cone Complementarity Algorithm is also used within this new
framework. The resulting algorithm is then tested using an example.
Chapter 5 Concluding remarks and comments on future research directions are
pre-sented in this chapter.
Appendices The Appendices contain supporting material for completeness but that
Mathematical Preliminaries
This thesis makes use of tools and draws concepts and ideas from several different
areas of science and mathematics. Here we collect the basic definitions and results
so that they may be used without any detailed explanation later in the thesis. These
topics are covered in additional depth in the listed references.
2.1
Elimination Lemma
The following lemma is about the elimination of an unknown variableKfrom a matrix inequality and the parameterization of one feasible K.
Lemma 2.1.1 Given matrices R∈Sm×m, U ∈ Rm×l and V ∈Rm×k. U, V have full column rank. Let U⊥, V⊥ denote the matrices such that [U U⊥],[V V⊥] are square and invertible with U⊥TU = 0, V⊥TV = 0. There exists a matrix K ∈Rl×k such that
R+U KVT +V KTUT <0 (2.1)
if and only if
U⊥TRU⊥ <0 and V⊥TRV⊥<0. (2.2)
If (2.2) is satisfied and (P2Q−221P2T)−1 is well-defined, then one solution of (2.1) is
given by
K = (P2Q−221P2T)− 1
(P1−P2Q−221QT12),
where [P1 P2] = UT
V+T V⊥, Q12 = V+RV⊥, Q22 = V⊥TRV⊥. U+, V+ represent
the pseudo-inverses of matrices U, V respectively.
2.2
Schur Complement
Schur complement is a very useful tool to modify certain linear matrix inequality
constraints to a different form that is more suitable for the particular algorithm. The
following theorem and additional properties of determinants could be found at [30].
For all matrices A∈Rn×n, B ∈Rn×u and D∈Ry×u,
A B 0 D
=det(A)·det(D). If either A or D is nonsingular, then
A B BT D
>0⇐⇒
A >0
A−BD−1BT >0
A B BT D
>0⇐⇒
D >0
D−BTA−1B >0 The following matrices
D−BTA−1B and A−BD−1BT
are known as the Schur Complement of A and D, respectively.
2.3
Bounded Real Lemma
The bounded real lemma proposed by Willems, Zhou and Khargonekar ([39],[22])
It can also be applied to a quadratically stable, uncertain linear system (see [3]). In
this case the condition becomes sufficient only.
Lemma 2.3.1 (Bounded Real Lemma) Given an LTI system with its transfer
function T(s) =D+C(sI−A)−1B. The system is asymptotically stable and
T(s)∞< γ if and only if there exists a matrix X =XT >0 such that
ATX+XA XB CT BTX −γI DT
C D −γI
<0. (2.3)
For more detailed information regarding the bounded real lemma the interested
Model Reduction Methods
The solvability condition for theH∞model reduction problem is shown in this chapter follow by the formulas to calculate the upper and lower bounds for γ. A description of the CCA is also shown in this section, later in the chapter comparison between the
CCA and the APA and Balanced truncation methods (3.5 and 3.6 respectively) are
given.
3.1
Polytopic Model Reduction Problem and
Solv-ability Condition
Consider a polytopic uncertain linear system G
˙ x(t) e(t)
=
A(t) B(t) C(t) D(t)
x(t) d(t)
, (3.1)
wherex(t)∈Rn, d(t)∈Rp and e(t)∈Rq. The state-space matrices of G, A(t), B(t), C(t), D(t) are continuous functions of time with compatible dimensions, and evolve
in a convex polytope
Ω= Co∆
Ai Bi Ci Di
, i= 1,2,· · · , L
(“Co” refers to the convex hull)
= L i=1 αi
Ai Bi Ci Di
, ∀αi ≥0, L
i=1
αi = 1
, (3.2)
In fact, G represents a set of LTV systems. Introducing a set of continuous functions
A ∆
=
α : R+−→RL, such that αi(t)≥0, L
i=1
αi(t) = 1, ∀t∈R+
,
and we assume 1−1 correspondence between allowable LTV systems from G and functions α∈ A. Then for any LTV system T ∈ G, there exists α∈ A such that
T(·)=ss
A(·) B(·) C(·) D(·)
=
L
i=1
αi(·)
Ai Bi Ci Di
,
where the symbol “=” stands for the state-space description of a linear system. Wess will also use the notationTαto emphasize the dependence of T on a particularα∈ A. The uncertain system G is assumed to be quadratically stable, i.e., there exists a matrix P ∈Sn×n, P >0 such that
ATi P +P Ai <0, i= 1,2,· · ·, L.
Then it is easy to show that any LTV system T ∈ G is exponentially stable by the compactness of Ω. The inducedL2 norm of such a T is defined as
Ti,2 ∆
= sup d∈L2
d2=0
e2
d2
, with x(0) = 0.
For our model reduction problem, we want to find a polytope
Ωr = Co∆
Ari Bir Cr
i Dir
, i= 1,2,· · · , L
in other words, a kth-order (k < n) polytopic uncertain system Gr
˙ xr(t) er(t)
=
Ar(t) Br(t) Cr(t) Dr(t)
xr(t) d(t)
, (3.4)
such that Gr is a good approximation of the original polytopic uncertain systemG in the induced L2 norm sense. To be precise, the problem we would like to solve is
Definition 1 (Polytopic Model Reduction Problem) Consider a scalar γ >0, a quadratically stable, nth-order polytopic uncertain linear system G defined by (3.1)– (3.2). If there exists a polytope Ωr (associated with a nˆth-order (n < nˆ ) uncertain
model Gr), such that for any continuous function α ∈ A Tα−Tαri,2 < γ,
where
Tα(·)=ss L
i=1
αi(·)
Ai Bi Ci Di
, Tαr(·)=ss L
i=1
αi(·)
Ari Bir Cr
i Dir ,
then we say the Polytopic Model Reduction Problem is solvable.
Clearly, γ is an upper bound for the worst-case approximation error between a given polytopic uncertain system and its reduced-order model. The following theorem
is our main result and provides a solution to this problem.
Theorem 1 Given γ > 0, the Polytopic Model Reduction Problem is solvable if there exist positive definite matrices X, Y ∈Sn×n, such that
XATi +AiX+ BiB T i
γ <0, i= 1,2,· · · , L, (3.5) ATi Y +Y Ai+ C
T i Ci
γ <0, i= 1,2,· · · , L, (3.6)
X I I Y
≥0 (3.7)
rank
X I I Y
If (3.5)–(3.8) are satisfied, then the vertices of one feasible polytope Ωr are given by
Ari = (NTL−i 1N)−1I−NTL−i 1ATi N, (3.9) Bir =−(NTL−i 1N)−1NTL−i 1Y Bi, (3.10) Cir =−CiL−i 1ATi N −CiL−i 1N(NTL−i 1N)−1I−NTL−i 1ATi N, (3.11) Dir =Di−CiL−i1I−N(NTL−i1N)−1NTL−i 1Y Bi, (3.12)
where Li =AT
i Y +Y Ai for i= 1,2,· · · , L. N NT =Y −X−1 and N is of full column
rank m ≤ ˆn. Finally, the reduced-order model Gr associated with Ωr is quadratically stable.
3.2
Lower and Upper Bounds for
γ
optIt is useful to have a priori estimate of the optimal error level γopt. Intuitively, we
have a lower bound from the approximation at the vertices of the original polytope.
On the other hand, an upper bound can be established from a generalized balanced
truncation procedure given below [also see [5] and [13]]. These bounds tell us about
the accuracy of the approximation and will be used with a bisection-type search for
sub-optimalγ level in the sequel. The following theorem provides the upper and lower bounds.
Theorem 2 Given a quadratically stable, polytopic uncertain linear systemG defined by (3.1)–(3.2). Let Ti(s), i = 1,2,· · ·, L denote those LTI systems at the vertices of the polytope Ω, and σk+1(Ti(s)) the (k+ 1)th largest Hankel singular value of Ti(s).
The optimal γopt of the Polytopic Model Reduction Problem is bounded below by
γopt ≥γlb =∆ max
i=1,2,···,Lσk+1(Ti(s)) (3.13)
γopt ≤γub= 2∆ n
j=k+1
ˆ
σj, (3.14)
where σˆj is a generalized Hankel singular value and σˆ1 >· · ·>σˆk>σˆk+1 >· · ·>
ˆ σn>0.
The procedure to obtain thegeneralized Hankel singular valuesis as follows. Given
a polytopic uncertain system G defined by (3.1) and (3.2), let P,Q be any solution of LMI’s.
P ATi +AiP +BiBiT <0, i= 1,2,· · · , L, (3.15) ATi Q+QAi+CiTCi <0, i= 1,2,· · · , L, (3.16)
The existence of such P,Q is guaranteed by the quadratic stability assumption of
the uncertain system. Then there exists a non-singular matrix Γ such that
ΓPΓT = Γ−TQΓ−1 = ˆΣ =
ˆ Σ1 0
0 Σˆ2
, (3.17)
where
ˆ
Σ1 = diag(ˆσ1,· · · ,σˆk), Σˆ2 = diag(ˆσk+1,· · · ,σˆn),
and ˆσ1 > · · · > σˆk > σˆk+1 > · · · > σˆn > 0. As a generalization to the concept of Hankel singular values [12] for an LTI system, we will call ˆσj, j = 1,2,· · · , n generalized Hankel singular values of the uncertain system G. Since the solution of P,Q is not unique, then in order to obtained an upper bound as small as possible, an
additional minimization objective is added to the set of LMIs 3.15 to 3.16, for this
3.3
Computational Scheme Based on Cone
Com-plementarity Algorithm
The Cone Complementarity Algorithm (CCA) was initially proposed by El Ghaoui as
a method to obtained reduced order controllers [10], extensive numerical experiments
were performed by the author using the CCA method in the solution of
reduced-order output feedback (ROF) and static output-feedback (SOF) problems. The same
problem was solved using cone complementarity algorithm and methods such as:
D−K iteration [27] and min-max algorithm [20], the comparison between the methods showed that in 70% of the cases the cone complementarity algorithm found a static
controller in only one iteration and that the D-K iteration failed in the vast majority
of the cases. This numerical study shows how effective the method is not only in
finding a solution, but also in a remarkable convergence speed. Since the model
reduction of uncertain polytopic systems share some similarities with the controller
reduction problem and in view of the effectiveness of the CCA to handle non-convex
constraints, it was decided to adapt the method to the model reduction problem.
According to [10] the idea of the Cone Complementarity Algorithm is to associate
the constraint (3.8) with the minimum of T r(XY). Although it is still a non-convex condition, it is easier to deal with compared with rank conditions. Then we have an
equivalent problem formulation
minT r(XY) subject to (3.5)−(3.7)
This problem can be called ” the cone complementarity” problem, since it extends
linear complementarity problems to the cone of positive semidefinite matrices. Since
the objective function is non-convex, the next step is to linearize the function in the
vicinity of a local point. To achieve this objective, first a feasible point is found (Xo ,Yo) and then a linear approximation ofT r(XY) at this point was proposed by Frank and Wolfe [28], which linearization takes the form:
The local searching algorithm is conceptually described as follows:
1) Find a feasible point Xo , Yo , if there are none, exit. Setk = 0.
2) FindXk+1, Yk+1 that solve the LMI problem subject to (3.5)-(3.7).
3) If a stopping criterion is satisfied, exit. Otherwise, set k =k+ 1 and go back to step 2).
The result of this algorithm is the solution for the suboptimal H∞ problem, the next step is to solve the optimal problem. This is done by solving the non-convex
minimization problem
minimize γ subject to (3.5)−(3.8)
To solve this problem a model reduction scheme based on the cone complementarity
algorithm and a bisection algorithm is implemented as follows:
Model Reduction Scheme
1) Setγub andγlb equal to the values found in (3.13) and (3.14). Select ˆn < n, where ˆ
n is the desired order of the reduced model.
2) Calculate tolerance tol = γub−γlb
γlb . If tol ≤ and rank
X I I Y
= ˆn +n, exit. Otherwise go to step 3).
3) Set γ equal to γ = γub+γlb
2 , and apply Cone Complementarity Algorithm to find
feasible X and Y.
4) CheckXandY resulting from the previous step, ifX, Y are feasible then calculate nr = rank
X I
I I
−n.
5) Ifnr >nˆ then setγub =γ; if not, then set γlb =γ. Go back to step 2)
3.4
Computational Scheme Based on Alternating
Projection Algorithm
In the following section some background information and a brief description of the
alternating projection method are given.
The objective of the alternating projections method is to find a common point of
several closed convex sets by using an iterative scheme. This technique provides a
sim-ple and numerically efficient alternative to other convex methods to solve non-smooth
convex problems. According to Combettes and Trussell (1990) [34] the alternating
projection technique can be generalized to solve non-convex feasibility problems,
suc-cessful application of the alternating projection method and its adapted versions have
been reported in image reconstruction [43], statistical estimation [4], covariance
con-trol, fixed-order controller design and H∞ norm model reduction problems [16, 15, 17]. The method is guaranteed to find a solution if all the set are convex, for the case
that not all the sets are convex the convergence is only guaranteed locally, due to this
reason one needs to initiate the algorithm in the neighborhood of feasible solutions.
Despite the fact that the model reduction problem is inherently a non-convex
problem, the problem is generally speaking, simple in the geometric structure of its
constraints sets and the rank condition can be handled easily, besides a starting
point is relatively easy to find using methods such as balanced truncation or optimal
Hankel norm model reduction. Due to the previous reasons the problem can be
solved effectively by the alternating projection method. The main drawback of this
method is the requirement of LMI optimization for the projection calculations, this
make the algorithm computationally relatively expensive and not suitable for large
dimensional uncertain model reduction. This is the main motivation for the use of
the cone complementarity algorithm.
Given a family of closed sets S1,S2,· · · ,Sm in H, find a vector x∗ ∈ H
such that
x∗ ∈ S =∆ m
j=1
Sj;
or determine none exists, i.e., S =∅.
For any ˆx∈H, a projection operatorPj onto the set Sj is defined by Pj(ˆx)=∆ x∈ Sj, such that
xˆ−x= inf y∈Sj
ˆ x−y.
Note that the projection is unique for a convex setSj; otherwise it may not be convex. {P1,· · · ,Pm} is called a cycle of projections. A sequence of alternating projections
{xn}∞n=0 is given by x1 =P1(x0),· · · , xm =Pm(xm−1), xm+1 =P1(xm),· · ·.
It was shown [4] that the sequence {xn}∞n=0 converges to a vector x∗ ∈ S globally asn−→ ∞, provided Sj, j = 1,2,· · · , mare closed convex sets and their intersection is non-empty. For the case that not all sets are convex, the convergence is only
guaranteed locally [34]. So one needs to initiate the algorithm in the neighborhood of
feasible solutions. The first step prior to the conceptual algorithm, is the definition
of the constraint sets.
CX ∆
=
X ∈Sn×n: X ≥δI,
ATi X+XAi XBi BT
i X −γI
≤ −δI, i= 1,2,· · · , L
,
CY ∆
=
Y ∈Sn×n: Y ≥δI,
AT
i Y +Y Ai CiT Ci −γI
≤ −δI, i = 1,2,· · · , L
,
CXY ∆
=(X, Y)∈Sn×n×Sn×n: Y −X ≥0, RXY
∆
=(X, Y)∈Sn×n×Sn×n: rank(Y −X)≤k.
δ > 0 is a small quantity such that all of the constraints are closed sets to fit the algorithm. The next step is to find a feasible solution ˆΣ of (3.15)–(3.17) using the
generalized balanced truncation procedure. Then the conceptual algorithm can be
proposed to solve the sub-optimal model reduction problem for polytopic uncertain
Model Reduction Scheme
0. Initialization: compute γlb, γub; set X0 =γubΣˆ−1, Y0 = ˆΣ/γub.
1. Test: if γub−γlb ≤, EXIT.
2. Bisection: γ = (γlb+γub)/2.
3. Iteration: start fromX0, Y0, construct a sequence of alternating projections onto
CX,CY,CXY and RXY.
4. Update: If the sequence converges to a feasible solution X∗, Y∗, set γub = γ,
X0 =X∗, Y0 =Y∗; otherwise, γlb=γ; return to Step 1.
Once the corresponding convergence criteria has been satisfied and X and Y has been obtained, then the reduced order model polytope can be reconstructed using
3.5
Comparison Between CCA and APA
In this section, we use a simple example to demonstrate the efficiency of our model
reduction algorithm. A second order approximation of a 4thorder uncertain plant will be sought using the cone complementarity algorithm and the alternating projection
method.
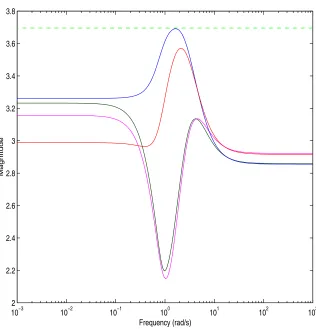
Example Given a polytopic uncertain plant G (adopted from [24])
˙ x(t) =
−2 3 −1 1
0 −1 1 0
0 0 a33(t) 12
0 0 0 −4
x(t) +
−2.5 b12(t) −1.2
1.3 −1 1 1.6 2 0 −3.4 0.1 2
u(t)
y(t) =
−2.5 1.3 1.6 −3.4 0 −1 2 0.1 −1.2 1 0 2
x(t),
where a33 ∈ [−3.5,−2.5] and b12 ∈ [−0.5,0.5]. We are interested in a second-order
approximation.
From Theorem 2, the lower and upper bounds for γoptr,2 are γlb= 3.14≤γoptr,2 ≤γub = 8.47.
After the calculation the following comparison table was obtained:
Table 3.1: Performance comparison between CCA and APA
Method Order of the system γ level Execution time Alternating Projection Method 4 3.79 440 sec Cone Complementarity Method 4 3.30 59 sec
The corresponding second-order polytope obtained through the Cone
complemen-tarity method is as follows:
Ωr,2 = Co
Ar i Bri Cir Dir
, i= 1,2,3,4
where
Ar1 =Ar2 =
−1.9973 −1.9275 0.0676 −0.6180
, C1r =C2r =
1.5275 0.0207 1.9382 0.9307 0.9053 0.2607 ,
B1r =
−4.1758 2.4516 2.9864 −0.5532 −0.6638 1.3513
, B2r =
−4.1758 2.0743 2.9864 −0.5532 −0.2981 1.3513
,
D1r =
3.3452 −0.0977 0.2650 0.2756 0.1332 −0.4331 0.4334 −0.1757 0.5595
, D2r =
3.3452 −0.6127 0.2650 0.2756 0.1962 −0.4331 0.4334 −0.3641 0.5595
;
Ar3 =Ar4 =
−1.2092 −1.1256 0.4917 −0.2844
, C3r =C4r =
1.6308 0.1076 1.9976 0.9864 0.8601 0.2159 ,
B3r =
−3.8871 2.5085 2.7988 −0.3684 −0.6222 1.2147
, B4r =
−3.8871 2.1356 2.7988 −0.3684 −0.2499 1.2147
,
D3r =
3.3885 −0.0882 0.2338 0.2987 0.1380 −0.4490 0.4165 −0.1791 0.5708
, D4r =
3.3885 −0.6018 0.2338 0.2987 0.2016 −0.4490 0.4165 −0.3679 0.5708
.
The approximation errors of the second-order model at its polytope vertices are
shown in Fig. 3.1. Alternatively, the model reduction problem has been solved using
alternating projection method [40]. The sub-optimalγ level achieved is 3.79, which is slightly worse than the cone complementarity algorithm. The reduced-order models
and its upper bound is shown in figure 3.2. On the other hand, the computational
scheme based on cone complementarity algorithm is much faster than alternating
projection method. For this example both algorithms were computed in a Sun
Work-station Spark 10 and as we observed from the table the first method is over 20 times
10−3 10−2 10−1 100 101 102 103 1.8
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6
Frequency (rad/sec)
Magnitude
102−3 10−2 10−1 100 101 102 103 2.2
2.4 2.6 2.8 3 3.2 3.4 3.6 3.8
Frequency (rad/s)
Magnitude
Some numerical experiments were performed comparing both methods. During
the study several random uncertain polytopic systems were created, modifying
char-acteristics such as number of states, desired reduced order and number of vertices.
The comparison between the two methods were oriented towards theγ level obtained which gives an idea of the fidelity of the approximation and the time needed for each
method as a measurement of the computational burden which becomes a serious issue
when working with large dimensional polytopes.
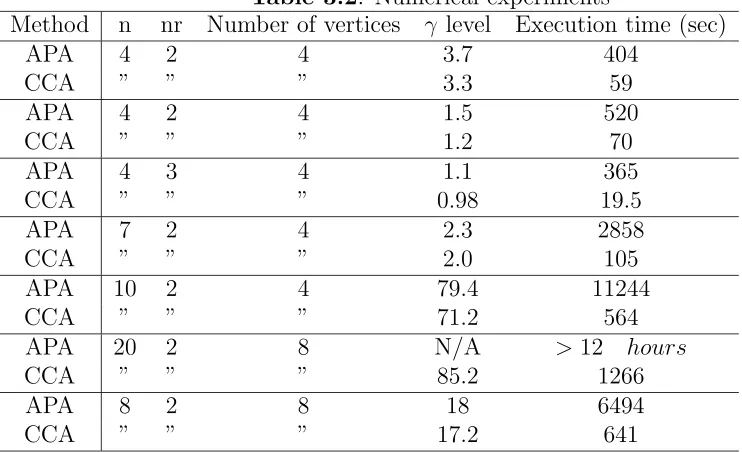
Table 3.2: Numerical experiments
Method n nr Number of vertices γ level Execution time (sec)
APA 4 2 4 3.7 404
CCA ” ” ” 3.3 59
APA 4 2 4 1.5 520
CCA ” ” ” 1.2 70
APA 4 3 4 1.1 365
CCA ” ” ” 0.98 19.5
APA 7 2 4 2.3 2858
CCA ” ” ” 2.0 105
APA 10 2 4 79.4 11244
CCA ” ” ” 71.2 564
APA 20 2 8 N/A >12 hours
CCA ” ” ” 85.2 1266
APA 8 2 8 18 6494
CCA ” ” ” 17.2 641
We can conclude clearly from the table that the CCA method performed
consid-erably better than the APA. In all the cases without exception the CCA was able to
find a smaller γ than the APA, which demonstrate that the reduced model obtained by the CCA is closer to the original system than the APA approximation. In terms
of computational effort, it is clear than the APA method is slower than CCA. In all
the cases studied the CCA algorithm was 20 times faster in average. In fact when
both methods were used to reduced a 20th order polytope with 4 vertices, after 12 hours has elapsed the APA method could converge to a satisfactory solution while
the CCA took only 21 minutes to obtain an approximation. This is evidence that the
3.6
Comparison Between CCA and Balanced
Truncation Method
In this section a brief description of the balanced truncation method is given and
finally a counter example is shown to demonstrate the inefficacy of this particular
method to deal with polytopic uncertain systems.
3.6.1
Description of the Balanced Truncation Method
Considers the problem of reducing the order of a linear multivariable dynamical
sys-tem using the balanced truncation method. Suppose
G(s) =
A11 A12 B1
A21 A22 B2
C1 C2 D
∈ RH∞
is a balanced realization with controllability and observability gramians P = Q = Σ =diag(Σ1,Σ2) where
Σ1 =diag(σ1Is1, σ2Is2,· · · , σrIsr) (3.18) Σ2 =diag(σr+1Isr+1, σr+2Isr+2,· · · , σNIN) (3.19)
Then the truncated system Gr =
A11 B1
C1 D
is stable and satisfies additive error
bound:
G(s)−Gr(s)∞= N
i=r+1
σi, (3.20)
For a detailed explanation of this method and its extension to frequency weighted
model reduction, Chapter 7 of Zhou([21] offers and extensive description of the
math-ematical formulation as well as practical examples of the method applied to LTI
3.6.2
Counter Example
Since our objective is to approximate a polytopic uncertain linear system by a lower
order polytopic uncertain system with a guaranteed induced L2 norm error, a naive
approach to this problem would be to approximate each vertex separately using the
hankel balanced reduction method and then construct a reduced-order polytopic
un-certain system as a convex combination of the lower order vertices. It can be shown
easily by a counter-example that the reduced-order system obtained from this naive
approach may have an arbitrarily large approximation error.
To show the previous fact a random uncertain polytope of 8thorder and 8 vertices will be reduced, the system is defined as follows.
A(t) =
−25 11 −5 5 5 1
−6 −32 −8 −6 −9 16 8 −13 −27 −1 0 10 2 −1 7 −29 −6 −16 −10 −3 −9 −1 −20 −1
13 −8 a63(t) 15 6 −32
, B(t) = 20 6
5 −6 19 6 −3 b42(t)
−11 1 −2 −20
,
C(t) =
−3 −6 −12 −1 9 −6 12 −23 11 4 c25(t) −7
, D=
12 0 −7 −8
.
where a63 ∈ [−9,−12] , b42 ∈ [−11,−9] and c25 ∈ [−21,−20]. We are interested
in second-order approximation, so the next step is to obtain a second order polytope
with the same number of vertices as the original system, this will be done using CCA
and Balanced truncation method. It is good to note that the reduce order polytope
obtained by balance truncation method, is the convex combination of the vertices
obtained by reducing each original vertex separately. As we denoted in section 3.1 a
measurement of the accuracy of the approximation will be given by
Now in figures 3.3 and 3.4 the error between each original vertex and its reduced
version is shown, for the approximation obtained trough CCA and Balanced
trun-cation respectively. In both figures the dashed line represent the upper bound that
each method guarantees.
10−3 10−2 10−1 100 101 102 103 1.35
1.4 1.45 1.5 1.55 1.6
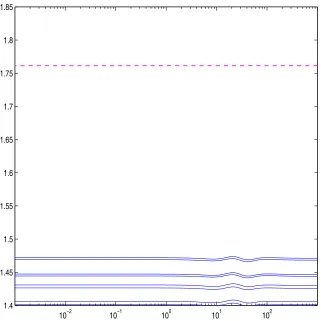
10−2 10−1 100 101 102 1.4
1.45 1.5 1.55 1.6 1.65 1.7 1.75 1.8 1.85
Figure 3.4: The second order approximation errors at vertices using Balanced trun-cation method. The dashed line represent Ni=r+1σi
We seen that both methods provide valid results for the vertices and that the
error is below the predicted upper bound. Now the next step is obtained 4 random
systems that are elements of the previous polytope . To do this 4 vectors α∈ A are chosen randomly and then 4 systems denoted Tα1...Tα4 are obtained by the convex
combination of each α and all the 8 vertices. Now the corresponding error for the original and reduced system using both methods will be shown in figures 3.5 and 3.6
10−3 10−2 10−1 100 101 102 103 1.42
1.44 1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6
Figure 3.5: The second order approximation error for Tα1 . . .Tα4 using CCA, the
dashed line representsγr,2
10−2 10−1 100 101 102 100
101 102
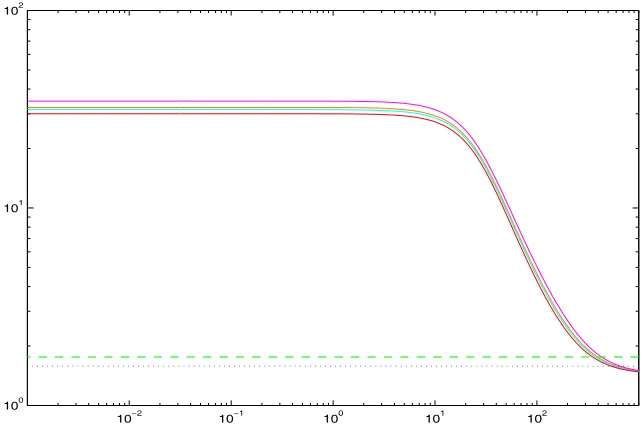
Figure 3.6: The second order approximation error for Tα1 . . .Tα4 using APA, the
From the analysis of these plots we can conclude that the CCA accomplished its
objective, since the error is completely bounded byγr,2 for all the 4 random systems,
which leads to the conclusion that the method guaranteed and bounded error not
only for the vertices, but for all the systems in the polytope.
On the other hand the Balanced truncation method provides a bounded error only
for the vertices (as seen in figure 3.4) but the error is completely unbounded for
all the random systems chosen in the polytope (see figure 3.6) it is clear that the
error is a lot bigger that the upper bound predicted by the Balanced method and
roughly speaking that implies a performance degradation of about 75% for this case,
something completely inadmissible, specially when the CCA error bound implies a
performance degradation of 3.5%.
Some partial conclusions can be drawn from the previous analysis made in this
chapter.
• First, compared with CCA and APA the Balanced truncation method is the fastest of the three, since its computational burden is very low
com-pared with the previous methods, but it can only handle LTI systems,
being completely inadequate for the reduction of polytopic uncertain
pa-rameter systems.
• And second, the CCA and APA methods are effective tools in the re-duction of polytopic uncertain parameter systems, but the comparison of
these two systems shows that the CCA reduces greatly the computational
load, which implies a faster execution and the ability to work with larger
dimensional uncertain systems.
• In terms of performance, the CCA seems consistently to obtain slightly better approximation than the APA, this can be seen in the error bound
Frequency Weighted Optimal
H
∞
Model
Reduction Method
In this chapter we extend the previous model reduction scheme to frequency weighted
model reduction, an introductory background section is included to provide some
information about previous research done on the area, the second section outline the
problem definition and solvability conditions and finally and example is shown to
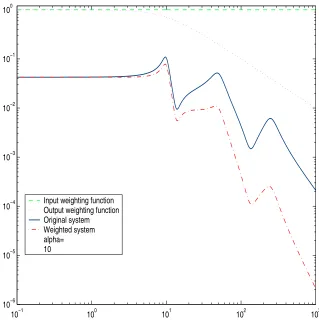
demonstrate how the approximation changes by changing the weighting functions.
4.1
Background
The motivation for a frequency weighted model reduction comes from the need to
cap-ture the approximation requirement over a pre-specified frequency range and desired
frequency bandwidth of input signals. Recently this area has received considerable
attention, the balanced truncation method was extended to frequency weighted case
by Enns [7]. Unfortunately, the stability of reduced-model was not guaranteed when
both input and output weights exist. Alternative approach to weighted balanced
truncation problem was proposed in [1] for a special class of weighting functions.
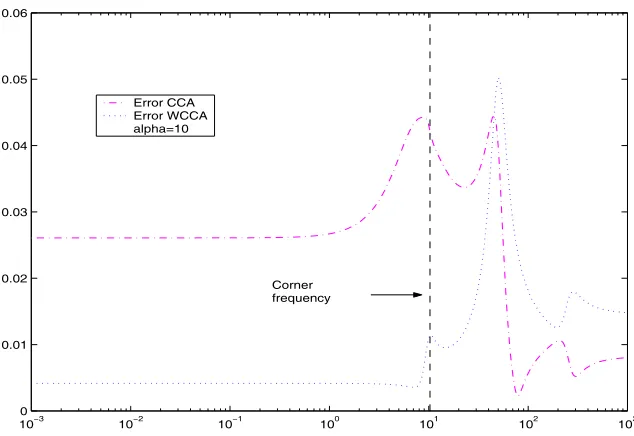
One side weighted model reduction problems with not necessarily stable weighting
functions [44] and self-weighted functions [45] were examined by Zhou using balanced
truncation techniques, and explicit error bounds were derived. For the extension of
optimal Hankel norm approximation to frequency weighted case, see e.g. [26],[14],
[45] and references therein. Note that these solutions are not necessarily optimal in
theH∞norm sense, hence variousH∞ norm lower and upper bounds of the weighted truncation errors were provided to quantify their sub-optimality.
This chapter considers frequency weighted model reduction problem for stable
linear uncertain polytopes systems and minimizesH∞ norm of the truncation errors. The result presented here is a generalization of the unweighted H∞ model reduction scheme reported in ([16], [18]). Different from previous weighted model reduction
results, the reduced-order model is shown always stable while stable input and output
weighting functions involved and besides the method has been extended from LTI
systems to uncertain time varying parameter systems . A necessary and sufficient
optimality condition characterizing weighted H∞ model reduction problem is given in terms of LMIs with one extra rank constraint, which generally leads to a non-convex
problem. Again this non-convex constraint will be treated using CCA method, in the
same way we did with the unweighted case.
4.2
Problem Definition
Given a nth order polytopic uncertain linear system T ∈ G as defined in section 3.1 with input and output weighting function matrices Wi ∈ RHq×s∞ , Wo ∈RHr×p∞ , one wants to find an asymptotically stable,kth (k < n) order uncertain polytope Tr, such that Tr is a good approximation of the original system T in the H∞ norm sense. To be precise, consider the optimization problem
min Tr∈RHp∞×q
deg(Tr)≤k
where proper, stable transfer function matricesT, Wi, Wo have their state-space data as
Tp =ss
Ap Bp Cp Dp
f or p= 1. . . L (4.2)
where L represents the number of vertices. Note that we are going to use su-perscript p to denote the pth vertex, to avoid confusion with the subscripts i and o reserved for the input and output weighting functions respectively.
Wi =ss
Ai Bi Ci Di
Wo =ss
Ao Bo Co Do
(4.3)
For the previous systems Ap ∈ Rn×n, A
i ∈ Rni×ni and Ao ∈ Rno×no. The eigen-values of Ap, Ai, Ao are in the open left-half plane for p = 1. . . L. Without lose of generality, it is assumed that
Bo Do and
Ci Di
have full column and row rank
respectively.
The following theorem is the main result and provides a sub-optimal solution to
the frequency weighted H∞ model reduction problem.
Theorem 3 Given γ > 0, the full order model T and weighting functions Wi, Wo
defined by (4.2). Let nw := n+ni +no, and
SoT1 SoT2 T
,
Si1 Si2
T
span the null
space of matrices
BT
o DTo
,
Ci Di
respectively (that is, BT
oSo1+DoTSo2 = 0 and
Si1CiT +Si2DiT = 0). Define
ˆ Apw :=
Ap 0 BpC
i 0 ST
o1Ao+SoT2Co 0
0 0 Ai
A˜pw :=
Ap 0 0
BoCp A
o 0
0 0 AiSiT1+BiSiT2
ˆ BwpT :=
DT
i Bp T
0 BT i
T
˜ Cwp :=
DoCp C o 0
f or p= 1. . . L.
Then the following statements are equivalent:
Wo(s)Tp(s)−Tpr(s)Wi(s)
∞< γ. f or p= 1. . . L.
2. There exist matrices X, Y ∈Snw×nw
+ , such that
I 0 0 0 ST
o1 0
0 0 I
XAˆpwT + ˆApwX
I 0 0 0 So1 0
0 0 I −γ
0 0 0
0 ST
o2So2 0
0 0 0
Bˆwp
ˆ
BwpT −γI
<0 (4.4)
f or p= 1. . . L
I 0 0 0 I 0 0 0 Si1
YA˜pw+ ˜Ap T w Y
I 0 0 0 I 0 0 0 ST
i1 −γ
0 0 0
0 0 0
0 0 Si2SiT2
C˜wpT
˜ Cp
w −γI
<0 (4.5)
f or p= 1. . . L
Y I
I X
≥0 (4.6)
rank
Y I I X
≤nw+k. (4.7)
Furthermore, an asymptotically stable Tpr satisfying conditions (3.5)-(4.7) has its state-space data given by
Ar
p Brp Cpr Dpr
= (P2Q−221pP2T)− 1(P