Abstract
THOMAS, CASEY. Aerodynamic Validation using MER and Phoenix Entry Flight Data. (Under the supervision of Dr. Robert Tolson.)
Every NASA Mars landing mission has used a 70-degree half-cone forebody,
however with different aft shapes for each mission. To keep with future NASA goals, it is
important to evaluate the aerodynamic database for this forebody design. The purpose of
this thesis is to first assemble the heritage aerodynamic data for this forebody, and then
compare this ground based data with flight data taken from three most reason Mars
entries (MER A, MER B, and Phoenix). The current Mars entry vehicle aerodynamic
database (MEVAD) was updated from the initial Viking wind tunnel data with results
from computational fluid dynamics (CFD) codes. The traditional MEVAD aerodynamic
coefficients of CN, CY, Cm and Cn were used in comparison with the flight derived
coefficients. The metrics for validation were based upon the coefficient differences and
the uncertainty associated with MEVAD. The validation of MEVAD indicated that
coefficients from MEVAD produced slightly higher force coefficients than the
flight-derived coefficients during the second hypersonic instability, which resulted in less than
1 degrees difference in α and β. The difference from the coefficients comparison was
equal to or less than the uncertainty from MEVAD and in the case of the force
coefficients was half the uncertainty from MEVAD. An inconsistency in MEVAD was
suggested by a difference of 2.5 degrees in the resulting α and β determined from the
comparison of the interpolation of the flight derived moment and force coefficients into
MEVAD from 20 second from parachute deployment to parachute deployment for all
and in the case of Phoenix the Cl corresponded to the change of the total angle of attack
Aerodynamic Validation using ME R and Phoenix Entry Flight
Data
by Casey Thomas
A thesis submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Master of Science
Aerospace Engineering
Raleigh, North Carolina
2011
APPROVED BY:
__________________________ _______________________
Dr. Fred Dejarnette Dr. Larry Silverberg
_________________________________________
Biography
Casey Thomas was born in Northern Hospital of Surry County on August 22,
1983, to Mr. Donald and Gaynell Thomas. He is the older brother of Donna Thomas. He
attended White Plains Elementary School, Gentry Middle School, and North Surry High
School. In high school, he worked at his father’s automobile repair center. It is here
where he became interested in modifying mechanical components for better performance.
After high school, he attended Surry Community College and where he developed an
interest in engineering. He graduated with an Associates in Science from Surry
Community College in 2004. He transferred to the University of North Carolina at
Charlotte where he graduated with a Bachelors of Science Degree in Mechanical
Engineering in 2007. He is currently working at the National Institute of Aerospace and
at NASA Langley Research Center under the supervision of Dr. Robert Tolson. While at
the National Institute of Aerospace he has been attending North Carolina State
University. He plans on graduating with his Masters of Science in Aerospace Engineering
Acknowledgements
I would like to thank everyone that made this report possible. A special thanks to
Dr. Tolson who guided and inspired me. A special thanks to Professor Blanchard who
pushed me further than I thought was possible. To my family and friends thank you for
Table of Contents
List of Figures ... vi
List of Tables ... viii
Nomenclature ... xi
1. Introduction. ... 1
2. Mars Entry Vehicle Aerodynamic Database. ... 3
3. Entry trajectory reconstruction. ... 5
3.1 Step one. ... 6
3.2 Step two. ...11
3.3 Step three. ...27
4. Atmospheric models. ...32
4.1 Flight extracted model. ...33
4.2 Atmosphere models effect on MEVAD inputs. ...34
5. Atmosphere effects on MEVAD coefficients. ...39
6. Density effects on flight derived aerodynamic coefficients. ...46
7. Aerodynamic coefficient comparisons. ...51
7.1 Force coefficients. ...53
7.2 Moment coefficients. ...60
7.3 Rolling moment. ...66
8. Angle of attack and sideslip angle comparisons. ...69
9. Summary of results. ...72
10. Works cited. ...76
Appendix...79
11. Appendix A: The aerodynamic database. ...80
11.1 Viking. ...81
11.2 Pathfinder. ...85
11.3 Mars Exploration Rover. ...87
11.4 Phoenix. ...89
11.5 Mars Science Laboratory. ...90
11.6 Transition and free molecular flow regimes data. ...90
11.7 Summary of the MEVAD. ...92
12. Appendix B: Viking aerodynamic coefficients. ...93
12.1 Wind tunnel data. ...93
12.2 Viking ballistic range data. ...102
12.3 Viking flight data. ...105
13.1 Pathfinder CFD data. ...117
14. Appendix D: MER aerodynamic coefficients. ...121
15. Appendix E: Phoenix aerodynamic coefficients. ...130
16. Appendix F: MSL aerodynamic coefficients. ...135
17. Appendix G: Free molecular flow and Knudsen number data. ...139
List of Figures
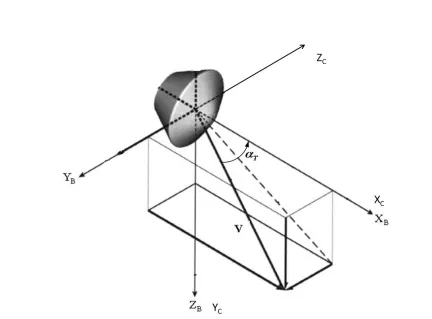
Figure 3.1: Body-axis (XB, YB, ZB) and cruise-axis (XC, YC, ZC) coordinate systems...7
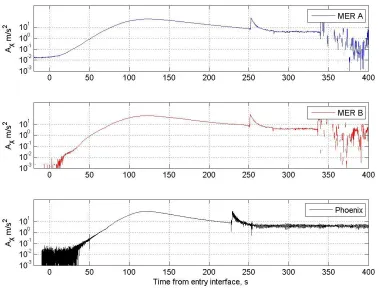
Figure 3.2: Accelerations along the body x-axis for MER A, MER B, and Phoenix....10
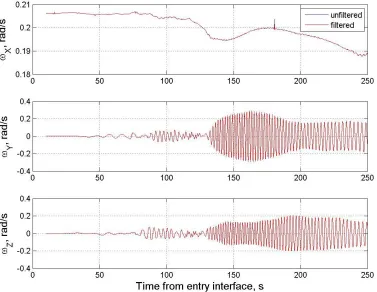
Figure 3.3: MER A angular rates in body coordinate system ... 14
Figure 3.4: MER B angular rates in body coordinate system. ... 15
Figure 3.5: Phoenix angular rate components in cruise coordinate system. ... 16
Figure 3.6: MER A angular accelerations in body coordinate system. ... 18
Figure 3.7: MER B angular accelerations in body coordinate system. ... 19
Figure 3.8: Phoenix angular accelerations in body coordinate system...20
Figure 3.9: MER A accelerations in body coordinate system. ... 25
Figure 3.10: MER B accelerations in body coordinate system. ... 26
Figure 3.11: Phoenix acceleration components in cruise coordinate system. ... 27
Figure 3.12: Areodetic altitude and atmospheric relative velocity of the MER A, MER B, and Phoenix entry vehicles...30
Figure 3.13: Total angle of attack from all entry vehicles. ...31
Figure 4.1: MER A Mach and Knudsen numbers for flight exacted and preflight atmospheres...36
Figure 4.2: MER B Mach and Knudsen numbers for flight extracted and preflight atmospheres...37
Figure 4.3: Phoenix Mach and Knudsen numbers for flight exacted and preflight atmospheres...39
Figure 5.1: MER A database force coefficient differences using two atmospheric models...40
Figure 5.2: MER A database moment coefficient differences using two atmospheric models...41
Figure 5.3: MER B database force coefficient differences using two atmospheric models...42
Figure 5.4: MER B database moment coefficient differences using two atmospheric models... 43
Figure 5.5: Phoenix force database force coefficient differences using two atmospheric models... 44
Figure 5.6: Phoenix database moment coefficient differences using two atmospheric models...45
Figure 6.1: MER A atmospheric comparison for CN. ...48
Figure 6.2: MER B atmospheric comparison for Cm. ...49
Figure 6.3: Phoenix atmospheric comparison for Cn. ...50
Figure 7.1: Combination coefficient determination procedure. ...52
Figure 7.2: MER A CN comparison with three methods for determining coefficients. .55 Figure 7.3: MER B CY with three methods for determining coefficients. ...57
Figure 7.4: Phoenix CN with three methods for determining coefficients. ...59
Figure 7.5: MER A Cm with three methods for determining coefficients. ...61
Figure 7.6: MER B Cn with three methods for determining coefficients. ...63
Figure 7.8: MER A, MER B, and Phoenix rolling moment aerodynamic coefficient, Cl.
...68
Figure 8.1: MER A angle of attack and sideslip angle differences from the combined coefficient method...70
Figure 8.2: MER B angle of attack and sideslip angle differences from the combined coefficient method...71
Figure 8.3: Phoenix angle of attack and sideslip angle differences from the combined coefficient method... 72
Figure 18.1: MER A Earth J2000 to body frame quaternion. ...148
Figure 18.2: MER B Earth J2000 to body frame quaternion. ...149
Figure 18.3: Phoenix PICS to cruise frame quaternion. ...149
Figure 18.4: Aerodynamic coefficient definitions. ...150
Figure 18.5: MER A CY comparison with three methods for determining coefficients. ...151
Figure 18.6: MER A Cn comparison with three methods for determining coefficients. ...152
Figure 18.7: MER B CN comparison with three methods for determining coefficients. ...153
Figure 18.8: MER B Cm comparison with three methods for determining coefficients. .... ...154
Figure 18.9: Phoenix CY comparison with three methods for determining coefficients. ...155
Figure 18.10: Phoenix Cm comparison with three methods for determining coefficients. ...156
Figure 18.11: MER A angle of attack comparison with three methods for determining the angle...157
Figure 18.12: MER A sideslip angle comparison with three methods for determining the angle...158
Figure 18.13: MER B angle of attack comparison with three methods for determining the angle...159
Figure 18.14: MER B sideslip angle comparison with three methods for determining the angle...160
Figure 18.15: Phoenix angle of attack comparison with three methods for determining the angle...161
List of Tables
Table 3.1 Body coordinate system to IMU frame quaternion. ... 8
Table 3.2 MER A PICS to Earth J2000 DCM ... 21
Table 3.3 MER B PICS to Earth J2000 DCM ... 21
Table 3.4 Distance Components from the IMU to COM in the Body-Axis Frame. .... 23
Table 3.5 Biases by mission... 23
Table 3.6 Misalignments in the rover IMU accelerations. ... 24
Table 3.7 Initial conditions for Mars entry missions in PICS. ... 28
Table 6.1 Moments of inertia and mass. ... 47
Table 7.1 MER A Force coefficient average differences. ... 56
Table 7.2 MER B Force coefficient average differences. ... 57
Table 7.3 Phoenix Force coefficient average differences. ... 60
Table 7.4 MER A moment coefficient average difference. ... 62
Table 7.5 MER B moment coefficient average difference. ... 63
Table 7.6 Phoenix moment coefficient average difference. ... 66
Table 11.1 Force and moment coefficient accuracy for Viking wind tunnel supersonic data...82
Table 11.2 Force and moment coefficient accuracy for Viking wind tunnel transonic data. ... 82
Table 11.3 MER aerodynamic database program uncertainties. ... 88
Table 11.5 Uncertainties in the static coefficients for transitional and free molecular
flow for MER and Phoenix. ... 92
Table 12.1 Viking wind tunnel data. ... 93
Table 12.2 Viking ballistic range data from PBR at Mach 2 in air. ... 102
Table 12.3 Viking ballistic range data from HFFAF at Mach 2 in air. ... 103
Table 12.4 Viking ballistic range data from HFFAF at Mach 11 in CO2. ... 103
Table 12.5 Viking ballistic range data from HFFAF in air with Reynolds number held constant. ... 104
Table 12.6 Viking ballistic range data from HFFAF in CO2 with Reynolds number held constant. ... 104
Table 12.7 Viking ballistic range data from HFFAF with total angle of attack held constant. ... 105
Table 12.8 Viking flight data from Viking 1. ... 105
Table 13.1 Pathfinder perfect gas aerodynamic coefficients determined from Halis CFD. ... 117
Table 13.2 Pathfinder real gas aerodynamic coefficients determined from LAURA CFD code. ... 119
Table 13.3 Pathfinder aerodynamic database aerodynamic coefficients. ... 120
Table 14.1 MER ballistic range testing... 121
Table 14.2 MER aerodynamic database program aerodynamic coefficients. ... 127
Table 15.1 Phoenix aerodynamic database program aerodynamic coefficients ... 130
Table 17.1 Pathfinder DAC aerodynamic coefficients. ... 139
Table 17.2 Pathfinder DACFree aerodynamic coefficients. ... 141
Table 17.3 Pathfinder aerodynamic database program aerodynamic coefficients. ... 142
Table 17.4 Pathfinder aerodynamic database program aerodynamic coefficients. ... 143
Table 17.5 MER aerodynamic database program DAC aerodynamic coefficients. ... 144
Nomenclature
Acom acceleration at the center of mass
Aimu acceleration at the IMU location
A reference area
CA axial force coefficient
Cl rolling moment coefficient
Cm pitching moment coefficient
CN normal force coefficient
Cn yawing moment coefficient
CY side force coefficients
D spacecraft diameter
dbar CO2 hard sphere gas diameter, 4.64e-10 m
g local gravity
gx, gy, gz gravitation components in PICS
h geodetic altitude
J2 second zonal harmonic
Kn Knudsen number
M Mach number
n number density
Na Avogadro's Number, 6.023e26 1/mole
q quaternion
q2 Y sin(θ/2)
q3 Z sin(θ/2)
q4 cos(θ/2)
time rate of change of the quaternion
P pressure
specific gas constant for CO2, 188.9223
Rarm distance from nose to moment reference location
Rcti position vector from center of mass to the IMU
RMars Mars equatorial radius, 3396200 m
Rpostion position of the spacecraft in PICS
Re Reynolds number
V atmosphere relative velocity
Vint velocity in PICS
Vs speed of sound
Acronyms
AHFFAF Ames Hypervelocity Free-Flight Aerodynamic Facility
APBR Ames Pressurized Ballistic Range
CFHT Continuous Flow Hypersonic Tunnel
CFD Computational Fluid Dynamics
DCM Directional Cosine Matrix
IMU Inertial Measurement Unit
LAURA Langley Aerothermodynamic Upwind Relaxation Algorithm
LEFTP Langley Eight Foot Transonic Pressure Tunnel
MER Mars Exploration Rover
MEVAD Mars entry vehicle aerodynamic Database
PICS Planet Inertial Coordinated System
MRP Moment Reference Point
MSL Mars Science Laboratory
MST Mach Six Tunnel
UPWT Unitary Plan Wind Tunnel
Greek
α angle of attack
αT total angle of attack
β sideslip angle
λd mean free path of a gas molecule
γ ratio of specific heats, 1.3
ρ density
µ gravitation parameter
ω angular rotation rate of the spacecraft
ωMars rotation rate of Mars
1.
Introduction.
Planetary exploration has been one of humanity's goals since the time of Galileo.
In keeping with this tradition, NASA developed a planetary exploration program. The
NASA planetary exploration program has sent satellites to all planets in our solar system
and has deployed entry vehicles to some. Entry vehicle designs are significantly more
challenging from an engineering point of view because not only do they travel through
space and enter orbit like the satellites, but also they must traverse the atmosphere of the
host planet. The aerodynamics of the entry vehicle becomes critical to mission success in
several ways. For example, by altering the landing location and by dissipating kinetic
energy from planet approach velocity such that parachute deployment is possible.
NASA has landed six entry vehicles on Mars to date. The entry vehicles sent to
Mars have used a 70-degree half-cone angle forebody shape. This forebody shape is to be
used for the entry phase on the upcoming Mars Science Laboratory landing mission.
NASA selected this forebody shape due to its high drag characteristics at hypersonic
velocities. High drag vehicles, such as those with the 70-degree half-cone angle forebody,
facilitate the transfer of planet approach kinetic energy into the atmosphere of the planet,
thus reducing vehicle velocity without additional propulsive maneuvers. Also, the last
two Mars missions landed down track of the predicted landing site, which raised concerns
about the current aerodynamic database1,2. Because of these two reasons and NASA’s
future interest in Mars exploration, it is important to verify the current Mars entry vehicle
The goal of this thesis is to validate the existing MEVAD using flight data. The
validation is based upon the comparison of flight data from the last few Mars missions,
i.e. MER A, MER B, and Phoenix, and their respective aerodynamic databases. The two
respective aerodynamic databases were used because the bounded static hypersonic
instabilities are functions of velocity and altitude, which are mission dependent3. The
validation was based upon the difference in traditional aerodynamic coefficients, i.e., CN,
CY, Cm, Cn, and Cl. CA is not in the list because it was used for calculating the density and
as a result was not used in the comparison. The metrics of the validation were the
nominal difference in the coefficients as well as the uncertainties associated with the
coefficients from the corresponding aerodynamic database from each mission.
The flight derived aerodynamic coefficients determinations from each mission
require four data quantities, namely, atmospheric relative velocity, accelerations, angular
rates, and density. The atmospheric relative velocity was determined from a trajectory
reconstruction. All three entry vehicles had onboard accelerometers and gyros, which
produced acceleration and angular rate data throughout entry. The atmospheric density
was not measured directly on any of the examined missions. To circumvent the lack of
density measurements, two methods for determining atmospheric properties were
utilized. The first method for determining density utilized a preflight model that was used
for mission planning and the second method derived density from flight data using the
database axial coefficient, CA along with axial acceleration.
The MEVAD contains all of the force and moment coefficients for each Mars
number (or Knudsen number in the rarefied flow regime). Angle of attack, sideslip angle,
and atmospheric relative velocity are determined from a trajectory reconstruction process.
The Mach number and Knudsen number require a density. As mentioned, two different
methods for determining density are used in this analysis. These methods for determining
density will be discussed later in the report. Section 2 provides a brief summary of the
MEVAD and Appendixes A-G provides a full report on the MEVAD along with tables
for the aerodynamic coefficients.
2.
Mars Entry Vehicle Aerodynamic Database.
The MEVAD was created for Viking and was modified for every subsequent
NASA Mars entry mission. The Viking aerodynamic database consisted of ballistic range
and wind tunnel data4,5. Since the Viking era, MEVAD has been updated with
computational fluid dynamics (CFD). In its current state, the MEVAD is a combination
of Viking wind tunnel data for subsonic through supersonic regimes and CFD results
were used for the hypersonic through rarefied flow regimes3. Each mission built around
the core of MEVAD and developed a unique aerodynamic database for mission planning.
Since the Viking era, subsequent additions to the coefficient database included
regions where the entry vehicle is unstable. There are three vehicles instabilities; two
bounded static hypersonic instabilities and one dynamic instability that all Mars entry
vehicles have the possibility of going through during entry. The first in-flight or high
speed bounded static hypersonic instability occurs as a result of the sonic line moving
from the shoulder on the leeside (opposite the windward side) of the vehicle to the nose
nonequilibrium to equilibrium. This change typically occurs during the transition from
rarefied flow to continuum flow6. The second in-flight or low speed bounded static
hypersonic instability only occurs at low total angles of attack (approximately less than 4
degrees) and results from the sonic line moving back from the nose region to shoulder on
the leeside. The sonic line moves due to the flow enthalpy decreasing in a near
equilibrium gas chemistry regime6. Viking flew at a high total angle of attack
(approximately 11 degrees) so it never experienced the second instability. Each mission
developed its respective mission aerodynamic database because the bounded static
hypersonic instabilities are functions of flow energy and gas chemistry, which are
mission dependent6. The aerodynamic coefficients outside the bounded static hypersonic
instabilities regions are not significantly different between the different aerodynamic
databases and form the core of MEVAD.
The third instability, the dynamic instability, occurs at low Mach numbers (less
than Mach 3.5) and was observed in ballistic range tests for Viking and MER4,7. The
dynamic instability has been well documented from flight data for Pathfinder, MER, and
Phoenix and is a function of center of mass and the basic geometry of these bodies6,8,2.
As mentioned earlier, the MEVAD was designed such that the dependent
variables are Mach number (or Knudsen number for the free molecular flow and
transitional regimes), and a total angle of attack. Total angle of attack is used instead of
angle of attack and sideslip angle because an axisymmetric vehicle was used to obtain the
aerodynamic database. Using total angle of attack, is sufficient to describe the out of the
CNT and total moment coefficient CmT. However, for flight coefficient comparisons with
the database, the database total coefficients are broken up geometrically by projecting the
total coefficients into angle of attack and sideslip planes, which result in the traditional
aerodynamic coefficients of CN, CY, Cm, and Cn3.
In summary, the validation of MEVAD, uses the traditional coefficients and are
discussed in section 7. The Mach and Knudsen numbers are determined from the entry
reconstruction trajectory parameters combined with atmospheric properties discussed in
section 5. A detailed discussion of the MEVAD with uncertainties is given in Appendix
A and the total aerodynamic coefficients tables are given appendices B through G. For
the purposes of this validation, the mission planning aerodynamic databases for MER and
Phoenix missions are utilized. That is, the force and moment coefficients from MER and
Phoenix aerodynamic databases, which are part of MEVAD, were compared to flight data
from their respective missions.
3.
Entry trajectory reconstruction.
The MEVAD validation is based upon the comparison of the aerodynamic
coefficients from MEVAD with flight derived aerodynamic coefficients, both of which
need quantities from the entry reconstruction. The entry reconstruction method used
initial conditions, measured accelerations, measured angular rates, as inputs into the
equations of motion. These motion equations were integrated to solve for the velocity,
attitude, and position of the entry vehicle during entry. With the velocity, angle of attack,
sideslip angle, and position of the entry vehicle known, atmospheric properties (density,
The method of entry reconstruction used in this study is the double integration of
the equations of motion in an inertial frame using the vehicle telemetry data obtained
from the onboard inertial measurement unit (IMU). This reconstruction process is similar
to the one used by the onboard navigation computer and require no aerodynamic, nor
atmospheric models. Although, a gravity is needed, this will be presented later. The
telemetry data, which consists of delta velocity and delta angles, is converted into
accelerations and angular rates respectively. The accelerations and angular rates are
processed before integration and discussed in section 3.2.
The entry reconstructions for all three vehicles followed the same three steps. The
first step transforms the telemetry data obtained from the IMU to a body coordinate
system. Embedded in this step are the selections of a reference time and the definition of
an inertial coordinate system. Step two processed the telemetry data by applying filters,
and the third and final step was the double integration of the equations of motion in an
inertial frame, which provided the needed trajectory results of position, velocity, and
attitude as a function of time.
3.1 Step one.
The first part of step one was to transform all telemetry data into a body
coordinate system, which were the body axis frame (MER missions) and the cruise frame
(Phoenix mission). The telemetry data was processed for Phoenix in the cruise frame (see
Fig. 3.1), which is a 90-degree rotation about the axisymmetric axis from the body axis
It is necessary that the telemetry data be transformed into a body coordinate
system (see Fig. 3.1), since the aerodynamic forces and moments are referenced to a body
coordinate system. The origin of both the body axis frame and cruise frame is at the
center of mass, the XB axis is through the axis of symmetry, the YB axis is perpendicular
to the x axis and the ZB axis makes a right hand orthogonal system9,3. The V vector in
Fig. 3.1 is the atmosphere relative velocity vector and the angle between the atmosphere
relative velocity vector and the x-axis is the total angle of attack.
Figure 3.1 Body-axis (XB, YB, ZB) and cruise-axis (XC, YC, ZC) coordinate systems.
The location of the IMU frame was measured in relationship to the entry vehicle
coordinate system is not time dependent, thus, the transformation is accomplished once
for the entire data sets with the quaternion in Table 3.1. MER A and MER B had two
IMUs (one on the Rover and the other on the disposable backshell) that collected data
during entry and both are included in the table.
Table 3.1 Body coordinate system to IMU frame quaternion.
q1 q2 q3 q4
MER A Rover -0.00030 -0.70709 -0.70712 0.00081 MER A Backshell 0.18247 0.31915 0.80510 0.46547 MER B Rover -0.00061 -0.70702 -0.70719 0.00001 MER B Backshell 0.18661 0.32252 0.80405 0.46331 Phoenix 0.67642 0.48052 0.51795 0.20806
It was desired that all three missions use a common time system such that
comparisons between the flight data from each mission can be made. The time reference
point for all three vehicles was based an entry interface altitude, which occurred at an
altitude of 125 km. Mission operations and mission designers commonly use this
reference. At this altitude, the atmospheric drag is typically lower than the accelerometer
sensitivity threshold.
The raw telemetry data was available for Phoenix for the length of the entry, but
for MER A, and MER B the telemetry data was available only after 90 seconds after
entry interface. The telemetry data available for MER A, and MER B before 90 seconds
were processed by the onboard navigation computer and as such, is currently in the body
axis frame. The angular rates for MER A, and MER B before 90 seconds were derived
from the quaternion and more details are given in the proceeding section.
All telemetry data sets were processed for the trajectory from entry interface to
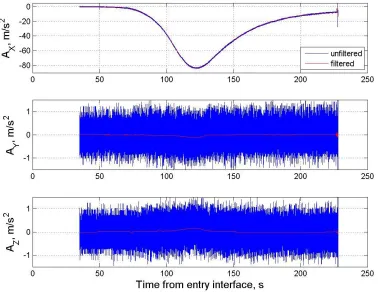
this analysis stops at parachute deployment. Fig. 3.2 y-axis shows the positive body
x-axis accelerations on a log scale as a function of linear time for MER A, MER B, and
Phoenix; top, middle and bottom figures respectively. The parachute deployment
occurred near 250 seconds from entry interface for both MER A, and MER B and near
228 seconds from entry interface for Phoenix as shown in Fig. 3.2. In Fig. 3.2, the
parachute deployment appears as the largest peak in acceleration, and an abrupt jump in
acceleration precedes the peak.
At entry interface, the accelerations due to the atmosphere drag are near the
sensitivity limits of the IMU and are denoted in Fig. 3.2 with very small acceleration
levels accompanied with relatively large oscillation in acceleration. The analysis of the
flight data started after a steady increase in acceleration was observed in Fig. 3.2. The
steady increase in acceleration was the result of higher atmospheric drag and indicated
that the atmospheric drag is above the accelerometer sensitivity threshold. The
accelerometer sensitivity threshold is mission dependent, as seen in Fig 3.2. The time of
the accelerometer sensitivity threshold occurred at about 10 seconds from entry interface
for both MER A and MER B missions and about 35 seconds from entry interface for
Phoenix. The times for accelerometer sensitivity threshold and parachute deployment set
the time domain for the MEVAD validation. That is, only trajectory data after the
accelerometer sensitivity threshold and before parachute deployment were used for the
comparison and subsequent validation. The time domains used for the comparison and
validation for MER A, and MER B are from 10 to 250 seconds from entry interface and
Figure 3.2 Accelerations along the body x-axis for MER A, MER B, and Phoenix.
The final part of step one was to define an inertial coordinate system where the
equations of motion were integrated. The inertial coordinate system selected was the
Planet Inertial Coordinated System (PICS), which placed the origin at the center of mass
of the planet and the fundamental plane along the equator. The x-axis is along the Mars
vernal equinox, and the z-axis is along the rotational axis of the planet with positive
direction in the direction of the north pole9. The processing of the accelerations and
angular rates is discussed in section 3.2, and is performed in the body axes coordinate
3.2 Step two.
Step two goal was to process the telemetry data in order to make adjustments in
the measured values and in order to prepare the telemetry data for integration of the
equation of motion in the PICS. Measurement adjustments are needed for a variety of
reasons, such as, the digitizing process, misalignments, sensor biases and sensor noise.
Part of the data processing also included determining angular accelerations, correcting for
center of mass offset of the accelerometers and transforming the telemetry data from the
body axis coordinate system to PICS. At the end of data processing, all steps are
completed such that the integration of the equation of motion in PICS can be
accomplished.
The telemetry data was processed first to reduce noise from the sensors, which
involved filtering the telemetry data. There were two methods for filtering telemetry data
utilized in the validation process, namely batch filtering and pass filtering. The
low-pass filtering was needed because of the separation in sampling frequencies between
MER and Phoenix missions. Phoenix had a sampling frequency of 200 Hz where MER
A, and MER B had a sampling frequency of 8 Hz. The higher frequency signals in
Phoenix telemetry data introduced unwanted noise from the over sampling. The removal
of the unwanted high frequency signals in Phoenix telemetry data was completed in such
a way as to maintain frequencies similar to the frequencies recorded by the MER
sampling rate. The low pass filter, which removed the unwanted high frequency signals,
uses a cut off frequency to remove higher frequencies10. The cut off frequencies utilized
The batch filtering method removed noise by fitting a second order polynomial to
a batch of data. A batch of data, i.e. number of data points over a time period, ranged
from 7 to 901 data points as required for a specific data set, discussed later in this section.
The measured angular rates for each mission are used to correct the accelerations
for center of mass offset. In order to accomplish these corrections, angular accelerations
are needed. Angular accelerations were determined from numerically differentiating the
measured angular rates. As result of the angular rates being used to correct the
accelerations and to determine the angular accelerations, the angular rates are processed
first. It is vital that the angular rates be processed correctly, as any error in the angular
rates will propagate through to the calculations of aerodynamic coefficients discussed in
section 7.
The measured angular rates were recorded for Phoenix throughout entry and for
MER A, and MER B starting at 90 seconds from entry interface to landing. The angular
rates after 90 seconds from entry interface for MER A, and MER B are used in
combination with the angular rates determined from the quaternion before 90 seconds
from entry interface. The angular rates for MER A, and MER B before 90 seconds from
entry interface were determined from the quaternion using the following,
(3.1)
where ωx, ωy, and ωz, are the components of the angular rates, q is the quaternion and is
Determining the angular rate from the quaternion required that a derivative of the
quaternion be determined which can potentially create additional noise in the rate data.
These numerical differentiating errors could affect the angular rates significantly.
Fortunately, from entry to 90 seconds from entry interface there was not a significant
change in angular rates.
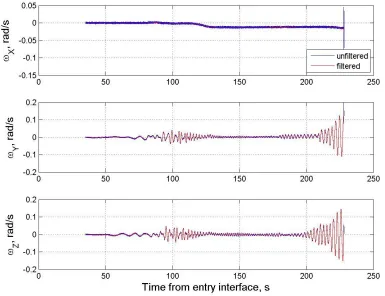
The angular rates along the x, y, and z axes for MER A are shown in Fig. 3.3 top,
middle, and bottom respectively with the blue line being the unfiltered angular rates and
the red being the filtered angular rates. The angular rate about the x-axis shows an
unexpected change around 120 seconds from entry interface, which will be discussed in
the section 7. The change in angular rate in the x-axis is unexplained because the entry
vehicle is supposed to be axisymmetric and therefore should not have a rolling moment,
Cl, which would cause a change in angular rate. The largest difference between the
filtered and unfiltered angular rates was a spike in the x-axis around 170 seconds from
entry interface.
The angular rates from 90 seconds after entry interface to parachute deployment
were filtered by using a second order least square fit over 7 data points. Several batch
sizes were tested to determine the optimal batch size. The criterion for selecting the
optimal batch size was the sum of residual from the unfiltered and filtered data sets that
Figure 3.3 MER A angular rates in body coordinate system.
MER B angular rates are presented in Fig. 3.4. The results for the filtered angular
rates are similar to MER A. The largest difference after the angular rates were filtered
occurred in the x-axis around 170 seconds from entry interface. The angular rates from
90 seconds after entry interface to parachute deployment were filtered by using a second
order least squares fit over seven data points, basically using the same process as MER A.
Like MER A, the x-axis has an unexpected change in angular rate near 140 seconds from
Figure 3.4 MER B angular rates in body coordinate system.
Phoenix angular rates are presented in Fig. 3.5. The unfiltered angular rates for
Phoenix (indicated by a blue curve) contained significantly higher noise levels compared
to MER A, and MER B, as seen in Figs. 3.3 and 3.4. (Note: the blue curve in the Phoenix
figure is more dominant than on either MER A or MER B figures). This noise is most
likely due to a combination of digitization and over sampling. The y and z axes angular
rate presents significantly smaller amplitude compared to the y and z axes MER A, and
MER B. The amplitude difference in angular rates in the y and z axes is most likely the
result of the torque from the thermal blanket for MER A, and MER B12. Phoenix
130 seconds from entry interface. A low pass filter with a cutoff frequency of 17 Hz was
used for filtering the angular rates from Phoenix.
Figure 3.5 Phoenix angular rate components in cruise coordinate system.
With the angular rates accomplished, the next process was to determine the
body-axis to inertial quaternion and angular accelerations for each entry vehicle. The
quaternion is needed to transform the telemetry data from the body axis coordinate
system into the PICS. The angular accelerations were needed to correct for center of mass
offset in the accelerations and for calculating the aerodynamic torque applied to the
The angular accelerations were determined by subtracting each adjacent filtered
angular rate and dividing by the time difference. The angular accelerations were then
filtered in a similarly manner as the angular rates. Again, it is necessary to take the
derivative of digital data, which could add noise to the data. The noisy signals are most
clearly visible in the angular accelerations before 90 seconds from entry interface for
MER A, and MER B shown in Figs.3.6 and 3.7, where the angular accelerations are the
results of two derivatives; one to obtain the angular rate from the quaternion, and the
other to get the angular acceleration from the angular rates.
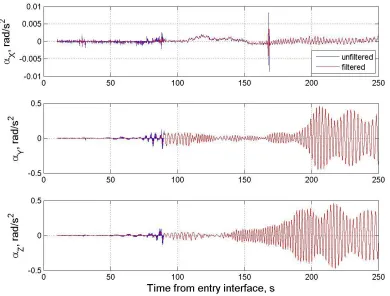
MER A angular accelerations for the x, y, and z axes are presented in Fig. 3.6 top,
middle, and bottom respectively. The blue lines are the unfiltered angular accelerations
and the red are filtered angular accelerations, which were filtered with a second order
polynomial over seven data points. The increase in angular acceleration and
non-symmetric values along the x-axis between 110 and 150 seconds from entry interface
indicates that a torque was applied to the entry vehicle. The increase in noise level on the
angular accelerations from entry to 90 seconds from entry interface was the result of two
Figure 3.6 MER A angular accelerations in body coordinate system.
MER B angular accelerations are shown in Fig. 3.7. The accelerations were
filtered with a second order polynomial over seven data points. The angular acceleration
about the x-axis is symmetric with the exception of a 7 second region near 130 seconds
Figure 3.7 MER B angular accelerations in body coordinate system.
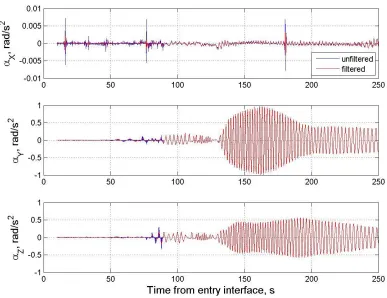
The angular accelerations for Phoenix are shown in Fig. 3.8 and were filtered with
a low pass filter with a cutoff frequency of 15 Hz. The x-axis angular acceleration
produced a slight decrease between 80 and 130 seconds from entry interface. The
increase in angular acceleration amplitude after 200 seconds from entry interface is the
Figure 3.8 Phoenix angular accelerations in body coordinate system.
As mentioned earlier, a quaternion was utilized to transform the acceleration data
from the body coordinate system to PICS. The body coordinate system changes in
relation to PICS throughout entry and thus is time dependent. The quaternion for MER A
and MER B (shown in appendix H) transfers the telemetry data from body coordinate
system to Earth J2000 coordinate system, which a direction cosine matrix (DCM) (shown
in table 3.2 and 3.3) is used to transfer to the PICS. The Earth J2000 coordinate system is
based on Earth mean equator and equinox of J2000 and is changing with respect to PICS,
coordinate system to PICS transformation was assumed to be a fixed rotation9. For the
Phoenix data set, the cruise frame coordinate system to PICS is directly available.
Table 3.2 MER A PICS to Earth J2000 DCM
0.673307067 -0.589579915 0.446153693 0.739362965 0.53690588 -0.406293591 0 0.603429863 0.797416077
Table 3.3 MER B PICS to Earth J2000 DCM
0.6733078544 -0.589579070 0.446153620 0.739362247 0.536906259 -0.406294394 0 0.603430350 0.797415708
The JPL navigation team estimated the sun unit vector of MER A and MER B at
entry interface. The sun unit vector is in the direction of the sun from the entry vehicle in
Earth J2000 coordinate system at entry interface9. It is necessary to rotate about the sun
unit vector to achieve reasonable landing position and velocity. The proper rotational
angle was determined for MER A, and MER B by using the landing conditions and
parachute conditions to determine a feasible match. The resulting rotational angle about
the sun vector was adjusted to -0.5 and -0.75 degrees for MER A, and MER B
respectively. Changing the rotational angle about the sun unit vector by more than 2
degrees caused trajectory parachute and landing conditions to be unrealistic. Small angle
rotations about the sun vector have a large impact on parachute deployment conditions
and a large impact on the trajectory angle of attack after the second hypersonic
instability.
The quaternion was calculated for Phoenix using an initial condition provided by
(3.2)
where q is the quaternion, is the derivative of the quaternion and ω is the filtered
angular rates.
The last part of the data processing section focuses on the accelerations. The
accelerations were first filtered then transformed into the PICS utilizing the body axis
coordinate system to PICS quaternion. The basic filtering of the accelerations utilized the
same processes as the angular rates; however, in addition biases were determined since
accelerations data was recorded before entry interface. The accelerations unlike the
angular rates had two special issues, the first was to correct for a center of mass offset
and the second was correct for a misalignment.
The accelerations like the angular rates were measured by the IMUs. However,
the accelerations values from the IMUs are not based at the center of mass of the entry
vehicle, required by the equation of motions. The measured accelerations include the
accelerations at the center of mass and a rotational acceleration component, which it is
necessary to remove. The removal of the rotational component in the acceleration was
accomplished using,
( 3.3)
where AIMU is the acceleration value from the IMU, is the angular acceleration, ω is the
angular rate, Rcti is the distance from the IMU to the center of mass of the entry vehicle
which is given in component form in Table 3.4, and Acom is the acceleration at the
Table 3.4 Distance Components from the IMU to COM in the Body-Axis Frame.
X (m) Y (m) Z (m)
MER A Rover -0.1757 0.2328 0.043 MER A Backshell -0.4454 -0.2497 -0.5299 MER B Rover -0.1757 0.2329 0.0439 MER B Backshell -0.445 -0.2499 -0.5296 Phoenix -0.2187 0.5197 0.2284
After the accelerations were corrected for the center of mass offset, the biases
were determined with acceleration data before entry interface. Before entry interface, the
entry vehicle will have little detectable acceleration as atmospheric drag is well below the
acceleration sensitivity threshold discussed earlier. This period before entry interface
allows for an opportunity to determine the bias for the accelerometers. The integrated
velocity values over several seconds before entry interface were fit with a first order
polynomial for all three entry vehicles. The bias value for an accelerometer was the slope
in the first order polynomial and bias values presented for each mission in Table 3.5.
Table 3.5 Biases by mission.
x (m/s2) y (m/s2) z (m/s2)
MER A 1.36E-08 -2.11E-07 -3.77E-07
MER B 5.32E-05 2.36E-07 2.36E-05
Phoenix -3.85E-04 2.10E-04 4.21E-04
With the acceleration corrected to the center of mass and biases removed, the
accelerations from the rover and backshell IMUs are compared for MER A. Shown in
Ref. 11, the accelerations from the rover and backshell disagree. MER B rover and
backshell corrected acceleration showed similar results. The disagreement in
accelerations indicates that one or both of the IMUs were misaligned. A misalignment in
coordinate system to be measured in the y and z axes of body coordinate system. The
portion of x-axis accelerations measured in y and z axes was determined by projecting the
x-axis acceleration onto the accelerations of the y and z axes of the body coordinate
system in a linear least squares fit. The slope of the linear least squares fit was interpreted
as the misalignment in the IMU11. The acceleration data used in the linear least squares
projection was limited to two regions, the first one being entry to 10 second from entry
interface and the second one from 140 to 250 seconds from entry interface. The resulting
misalignments angles are used to correct MER A, and MER B rover IMU accelerations
and are presented in Table 3.6. Shown in Ref. 11, after the IMU misalignment correction
the acceleration data from both rover and backshell IMUs agree well for both MER A,
and MER B. The misalignment angles determined for this validation are within 0.005
degrees of the misalignment angles determined from Ref. 11.
Table 3.6 Misalignments in the rover IMU accelerations.
y (deg.) z (deg.)
MER A 0.0418 -0.0362
MER B 0.0363 -0.0462
Like the MER A and MER B angular rates, the accelerations for are split before
and after 90 second from entry interface. The onboard navigational computer processed
the accelerations before 90 seconds from entry interface. The accelerations after 90
seconds from entry interface were filtered using a second order polynomial over a batch
of data. The two acceleration data set time segments were combined into one data set for
purpose of this validation.
The unfiltered and filtered/corrected acceleration data sets from the MER A rover
been corrected for the misalignment. The misalignment correction to the non-axial forces
produces the largest change during the instability regions. The misalignment correction in
the acceleration in the y-axis body coordinate system shown in the middle panel of Fig.
3.9 acts as a bias correction during the first and second instability resigns. The
misalignment correction in acceleration along the z-axis shown in the bottom panel of
Fig. 3.9 shifts the acceleration by less than 0.02 m/s2. The MER A acceleration data from
90 seconds from entry interface to parachute deployment was filtered using a second
order least squares fit over seven data points.
MER B x, y, and z axes accelerations in the body coordinate system are shown in
Fig. 3.10 top, middle, and bottom respectively. The accelerations measured from the
backshell IMU were used from entry to 90 seconds from entry interface and for the
remainder of the acceleration data set, the rover IMU accelerations were used. The rover
accelerations were fit with a second order least squares fit over seven data points. The
misalignment correction shifted the acceleration less than 0.004 m/s2 during the
instability regions.
Figure 3.10 MER B accelerations in body coordinate system.
Phoenix x, y, and z axis accelerations in cruise frame are shown in Fig. 3.11 top,
large amount of noise. Two filters are used to remove noise from the Phoenix
accelerations. A low pass filter with a cut off frequency of 15 Hz was used first to remove
the high frequency noise. The low frequency noise in the accelerations was decreased by
fitting a second order polynomial over 901 data points. The second filter was utilized due
to concerns that a lower cut off frequency for the low pass filter would remove parts of
the acceleration signal.
Figure 3.11 Phoenix acceleration components in cruise coordinate system.
3.3 Step three.
The final step was to integrate the equations of motion in the PICS. The equations
equation of motion required the initial conditions and the telemetry data, which was
transformed into PICS. The initial conditions for all three missions came from the
onboard navigation computer at entry interface and are given in Table 3.7.
Table 3.7 Initial conditions for Mars entry missions in PICS.
X (m) Y (m) Z (m) Vx (m/s) Vy (m/s) Vz (m/s)
MER A -2,833,658 -1,800,899 -1,064,442 3,522 -4,166 1,383
MER B -3,128,460 -1,608,596 -176,209 3,535 -4,445 469
Phoenix 1,060,216 -645,718 3,296,296 1,465 5,350 -771
The equations of motion for the entry vehicle in PICS are defined as,
(3.4)
The gravitation term is defined in PICS by differentiating the gravitational potential
function. The gravitational model used in the integration process contains up to the
second zonal harmonic, a portion of which is shown as,
(3.5)
where x, y, and z are the corresponding location in PICS, r was the magnitude of the
position vector, J2 is the second zonal harmonic of Mars, RMars is the equatorial radius of
Mars and µ is the gravitation parameter of Mars14.
Areodetic altitude was determined from position and was used for interpolation of
the atmospheric models discussed in the next section. The areodetic altitudes for all three
missions were determined utilizing the methods defined in Ref. 15. The solution for the
oblate spheroid15. The resulting areodetic altitudes by time from entry interface are
present in top of Fig. 3.12 with MER A in blue, MER B in red, and Phoenix in black.
The velocity determined from the integration of the equations of motion was the
inertial velocity in the PICS frame and as such does not include the rotation of the
Martian atmosphere. In addition, the MEVAD requires angle of attack, sideslip angle,
and Mach number for interpolation, which require the atmospheric relative velocity. The
atmospheric relative velocity was determined by assuming a rigid rotating atmosphere
using,
(3.6)
where Vx, Vy, and Vz are the atmospheric relative velocity components in PICS, VintX,
VintY, and VintZ are the velocities in PICS from the integration of the equation of motions,
and ωMars is the angular rotation rate of Mars.
The magnitude of velocity of the entry vehicle, corrected for the rigid rotating
atmosphere, is present in bottom of Fig. 3.12. MER A and MER B entered the
atmosphere of Mars with a velocity around 5.3 km/s, where Phoenix had a slightly higher
velocity of around 5.5 km/s. All three entry vehicles had a velocity between 0.3 and 0.45
km/s at parachute deployment with Phoenix parachute deployment occurred earliest near
Figure 3.12 Areodetic altitude and atmospheric relative velocity of the MER A,
MER B, and Phoenix entry vehicles.
The atmospheric relative velocity was transferred from PICS into to the body
coordinate system using the quaternion from section 3.2. The atmospheric relative
velocity (assuming no winds) was utilized to determine the total angle of attack, angle of
attack, and sideslip angle from,
(3.8)
(3.9)
The total angle of attack for MER A, MER B, and Phoenix is presented in Fig.
3.17 top, middle, and bottom respectively. The instability regions are clearly visible in
MER A, and Phoenix. The first and second instabilities occurred for MER A and Phoenix
near 75 and 125 seconds from entry interface. The first instability is not clearly visible for
MER B; however, there was some question before launch if MER A, and MER B would
go through the first instability16. The second instability for MER B occurred near 125
seconds from entry interface.
4.
Atmospheric models.
The comparison between MEVAD and flight aerodynamic coefficients require the
trajectory results from integration of the equations of motion and atmospheric state
properties. The atmospheric state properties, namely pressure and density, are used to
determine Mach numbers, and Knudsen numbers in the interpolation of MEVAD.
Further, density is also needed in the calculation of all the flight derived aerodynamic
coefficients. Lacking atmospheric measurement information during the entries introduce
special challenges in obtaining flight aerodynamic coefficients. To help mitigate the lack
of atmosphere measurements, and to limit the dependence of the analysis of unknown
atmosphere properties, two independent approaches for determining density have been
developed. The first method for determining the atmospheric properties was simply using
the preflight models for MER A, MER B, and Phoenix. The preflight atmosphere models
main focus was to predict winds near the surface17,19. The second method employed a
well-documented procedure utilized by earlier researchers, of using the axial coefficient,
CA along with the axial measurement acceleration to obtain a flight extracted density.
From density and the gravity model, the pressure is calculated from the hydrostatic
equation, discussed later.
The purpose for using two independent atmosphere models is to consider flight
coefficient data during instances when both models produce coefficients with small
differences. The densities from the two methods in determining coefficients from
MEVAD are displayed and discussed in section 5. The two atmosphere models are also
4.1 Flight extracted model.
The flight extracted model calculated density using,
(4.1)
In the density equation, CA is a function of total angle of attack, t and Mach number, M
and is a transcendental equation because density appears on both sides of the equation
and cannot be separated algebraically. To solve the CA equation requires an iterative
process. This is accomplished by assuming an initial estimate of CA and subsequently
iterating with the database. That is, with the new CA, the cycle repeats until the change in
density decreased to 0.001 percent of the previous density value. The trajectory
reconstructed total angle of attack, t and the corresponding aerodynamic database for
that particular mission were used when acquiring the CA . The Mach number calculation
is shown subsequently.
In conjunction with the density being calculated from equation 4.1, the pressure
was calculated by integrating the hydrostatic equation as such,
(4.2)
The flight extracted atmosphere approach started at entry interface where the atmospheric
pressure was near zero. For the initial pressure, zero was assumed.
With these properties determined, Knudsen numbers and Mach numbers were
simultaneously calculated. The resulting Mach number and Knudsen numbers are shown
The atmosphere properties of importance to the database application are Mach
number and Knudsen number. The Mach number calculations follows,
(4.3)
where the V is the atmospheric relative velocity and s is the speed of sound. The speed
of sound was calculated using,
(4.4)
The Knudsen number is defined as,
(4.5)
where λd is the mean free path and Lreff is the reference lengths for MER and Phoenix
entry vehicles, which were 2.65 meters16,3. The mean free path is,
(4.6)
4.2 Atmosphere models effect on MEVAD inputs.
The two atmosphere dependent inputs to the MEVAD are Mach number and
Knudsen number. It is necessary to show the difference that the atmosphere models have
on the inputs to the database. This is discussed next.
The atmospheric proprieties determined from both models introduced in this
section generate two values of Knudsen numbers and two values of Mach numbers. The
two resulting Mach and Knudsen numbers for MER A are shown in Fig. 4.1 top and
bottom respectively. The solid blue line is the Mach numbers and Knudsen numbers
determined utilizing the flight extracted atmospheric model and the red dotted line are the
model. The vertical dotted blue line is the transition line from transitional flow to
continuum flow. The Mach numbers from the two atmospheric models agree with the
exception of the first 30 seconds from entry interface. This difference occurs when the
flow regime is transitional flow so Mach numbers were not used for interpolation for this
period. The greatest difference in Mach number, where Mach number was used for
interpolation into the aerodynamic database, was less than 1.7 and it occurred near 95
seconds after entry interface. The largest difference in Knudsen number, which was less
than 50 percent, occurred at entry interface then decreased until 40 seconds from entry
interface. This large difference in Knudsen number will require a comparison in the
resulting interpolated coefficients from MEVAD for both methods of determining
Figure 4.1 MER A Mach and Knudsen numbers for flight exacted and preflight
atmospheres.
MER B resulting Mach and Knudsen numbers are shown in Fig. 4.2 top and
bottom respectively. From entry interface to 25 seconds from entry interface the flight
extracted model suffered from small accelerations, which caused large fluctuation in
density and resulted in the signal issues in Mach and Knudsen numbers. The greatest
difference between the flight extracted and preflight models for Mach number occurred
before 40 seconds from entry interface, however, this was in the transitional flow
regimes. The largest difference in Mach numbers where the Mach numbers were used for
125 seconds from entry interface to parachute deployment there was not a significant
difference between atmospheric models for Mach numbers. MER B Knudsen numbers
models agree very well with the exception of from entry interface to around 40 seconds
from entry interface, which produced a difference less than 50 percent. Again this
difference in Knudsen will require a comparison of the resulting coefficients from
MEVAD shown later in this section.
Figure 4.2 MER B Mach and Knudsen numbers for flight extracted and
Mach and Knudsen number results for Phoenix are shown in Fig. 4.3. The Mach
numbers from both atmospheric models agrees well throughout entry. The maximum
difference in Mach numbers between the atmospheric models after 80 seconds from entry
interface was less than 1.7 and it occurred near 110 seconds from entry interface. The
Knudsen number comparisons shows a constant, but relatively small, difference between
the preflight and flight extracted atmospheric models with the preflight model producing
higher Knudsen number throughout the entry. The difference in the resulting coefficients
from the interpolation of MEVAD utilizing both methods of determining atmospheric
Figure 4.3 Phoenix Mach and Knudsen numbers for flight exacted and
preflight atmospheres.
5.
Atmosphere effects on MEVAD coefficients.
It is important to understand the effects that the two atmosphere models have in
term of the aerodynamic coefficients. To accomplish this goal, the Mach number and
Knudsen number (the MEVAD input quantities) time histories using the preceding
equations for each of the three entry mission have been performed. The results from the
preceding equation (using CA, measured acceleration, and trajectory reconstruction
results) are referred to as “flight” Mach number and Knudsen number. In addition, the
same calculations are made substituting the three preflight model atmosphere properties
and are labeled “preflight” Mach number and Knudsen number. The difference results
from both calculations are presented and discussed next.
The differences in the interpolated coefficients from MEVAD for MER A force
and moment coefficients utilizing both atmosphere models of determining atmospheric
properties are presented in Figs. in 5.1, and 5.2. The difference in the coefficients near
125 seconds from entry interface occurred during the second hypersonic instability,
which the coefficients from MEVAD in this region are very sensitive to density. The
difference in density from the two methods appeared as an oscillation from 200 seconds
from entry interface to parachute deployment. The uncertainties for in the MEVAD for
MER (given in the Appendix D) is 0.01 for the force coefficients. Thus, the largest
coefficient difference due to the atmosphere models is about 4 percent of the database
for the hypersonic and supersonic flight regimes respectively9. Thus, the differences in
the moment coefficients are less than of 3 percent of the MEVAD uncertainty.
Figure 5.1 MER A database force coefficient differences using two atmospheric
Figure 5.2 MER A database moment coefficient differences using two
atmospheric models.
The differences in the interpolated force and moment coefficients from MEVAD
for MER B utilizing both methods for determining atmospheric properties are shown in
Figs. 5.3 and 5.4. The difference near 10 seconds from entry comes from the fluctuations
in acceleration used to determine the flight extracted atmospheric model. The oscillation
near 175 seconds from entry interface to parachute deployment was the result of a
difference in density. The differences from MEVAD are larger for MER B than for MER
Figure 5.3 MER B database force coefficient differences using two atmospheric
Figure 5.4 MER B database moment coefficient differences using two
atmospheric models.
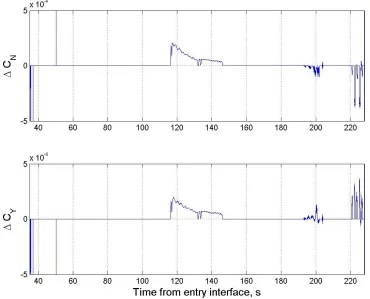
The differences in the interpolated force and moment coefficients from MEVAD
for Phoenix utilizing both methods for determining atmospheric properties are shown in
Figs. 5.5 and 5.6. The differences near 35 second from entry interface was the result of
acceleration fluctuations from the flight extracted atmospheric model, and the differences
around 120 seconds from entry interface were the result of MEVAD sensitive to density
during the second hypersonic instability. The uncertainties from MEVAD for Phoenix for
CN and CY are 0.01 and 0.08 respectively. The moment coefficient uncertainties for Cm
supersonic regime3. The differences inthecoefficients are less than 8 percent of the
uncertainty of MEVAD for Phoenix.
Figure 5.5 Phoenix force database force coefficient differences using two
Figure 5.6 Phoenix database moment coefficient differences using two
atmospheric models.
The differences in the interpolated coefficients from MEVAD for the two
methods of determining atmospheric properties are less than 10 percent uncertainty of the
MEVAD force and moment coefficient uncertainty for all three entries. The 10 percent of
uncertainty of MEVAD results indicate that the atmosphere models produce the same
force and moment coefficients within 10 percent uncertainty of the database. This is good
6.
Density effects on flight derived aerodynamic coefficients.
It has been established that using either atmosphere models (“flight” or
“preflight”) produce equivalent aerodynamic coefficient (within an acceptable tolerance,
10 percent) from the database. In this section, the flight coefficient using both atmosphere
models are generated. The results from this analysis use the same nomenclature as the
preceding section. That is, “flight” is used when flight derived atmosphere properties are
used and “preflight” is used when the atmosphere models are used. The flight and
preflight derived aerodynamic coefficients are the CN, CY, Cm, Cn, and Cl.
The flight derived aerodynamic coefficients were calculated using,
(6.1)
(6.2)
(6.3)
(6.4)
(6.5)
where Ay, and Az are accelerations in the y and z axes of the body coordinate system. Mx,
My, and Mz are the moments about the x, y, and z axes of the body coordinate system
(6.6)
(6.7)
(6.8)
The moments of inertia and mass for each entry vehicle used to calculate the flight
derived aerodynamic coefficients are presented in Table 6.1.
Table 6.1 Moments of inertia and mass.
Ixx
(Kgm2) (KgmIyy 2) (KgmIzz 2) (KgmIxy 2) (KgmIxz 2) (KgmIyz 2) Mass (Kg) MER A 365.605 278.6485 272.0971 -0.03154 -0.01674 -0.64161 811.7 MER B 276.424 264.923 368.0042 -2.22856 0.010403 -0.01925 811.7 Phoenix 285.552 179.665 201.223 0.0002 0.14 3.997 602
An aerodynamic coefficient sample from each of the three entry missions flight
derived coefficients using the two atmosphere models is presented. The remaining flight
derived coefficients determined with the two atmosphere models are not shown here, but
yield similar conclusions.
MER A flight derived CN from the flight extracted and preflight atmospheric
models are shown in the top panel of Fig. 6.1 blue and red respectively. The percent
difference between the CN from the two atmospheric models, based upon the uncertainty
from MEVAD, is presented in the bottom panel of Fig. 6.1. The two atmospheric models
come into agreement near 50 seconds from entry interface. Prior to 50 seconds, the
differences are due to density differences. From 50 seconds from entry interface to
parachute deployment the difference in CN from the two methods of determining
atmospheric properties is small, less than of 0.0025, which resulted in a percent