Neural Network based Minimization of
BER in Multi-User Detection in SDMA
Venkata Reddy Mettu and Krishan Kumar Department of Electronics and Communications Engineering,
NIT Hamirpur, Hamirpur, Himachal Pradesh-177005, India Srikanth Pullabhatla
Department of Electrical and Electronics Engineering, NIT Hamirpur, Hamirpur, Himachal Pradesh-177005, India
Abstract:
Neural networks can be used for linear design, adaptive prediction, amplitude detection, character recognition and many other applications. This paper investigates the use of neural network based minimization of BER in Multi-User Detection. Different algorithms are used in detecting the errors caused in AWGN channel. These errors are rectified by using Widrow-Hoff algorithm by updating their weights. But Computational Complexity and Fast performance are required and thus Adaptive Filtering has been proposed. In this paper we consider SDMA scheme with 3 transmitters and 4 receiver antennas and BPSK modulation scheme is used
.
Keywords: Adaptive Algorithm; Bit error rate (BER); Channel; Neural networks; Multi user detection (MUD); Widrow-Hoff.
1. The Introduction
Neural Network based smart antennas are capable of improving the achievable wireless system capacity and quality by suppressing the effects of both inter-symbol interference (ISI) and co-channel interference (CCI). This paper consider a space-division multiple access (SDMA) uplink scheme, where each transmitter employs a single antenna, while the base station (BS) receiver has multiple antennas Chen et al (2004). In a CDMA system, each user is separated by a unique user-specific spreading code. By contrast, an SDMA system differentiates each user by the associated unique user specific channel impulse response (CIR) encountered at the receiver antennas. In this analogy, the unique specific CIR plays the role of a user-specific CDMA signature. However, owing to the non-orthogonal nature of the CIRs, an effective multiuser detection (MUD) is required for separating the users in an SDMA system Winters et al (1994); Tsoulos et al (1997); Blogh et al (2002); Hanzo et al (2003). Neural networks have recently been used in the design of multiuser receivers for SDMA systems. Neural Network based receivers employing the Widrow-Hoff criterion usually show good performance and have simple adaptive implementation, at the expense of a higher computational complexity John (1998); Widrow and Lehr (1990); Widrow and Winter (1988); Zuradha (2006). The deployment of non-linear structures, such as neural networks, can mitigate more effectively inter-symbol interference, caused by the multipath effect of radio signals and multiple access interference, which arises due to the non-orthogonality between users’ signals. In the last few years, different artificial neural networks structures have been used in the design of multiuser detectors (MUD). These neural systems make use of non-linear functions to create decision boundaries to detect transmitted symbols, whilst conventional (MUDs) employ linear functions to form such decision regions. In addition, the bulk of previously reported neural and linear receivers are based upon the WIDROW-HOFF criterion, since this approach usually shows good performance and has simple adaptive implementation. However, the AMBER methodology has not been proposed for SDMA networks and hence the present work throws light on this area. In this paper, a similar approximate minimum bit error rate approach to adaptive multiuser receivers using dynamic neural networks based on Adaptive learning algorithm has been proposed.
2. System model
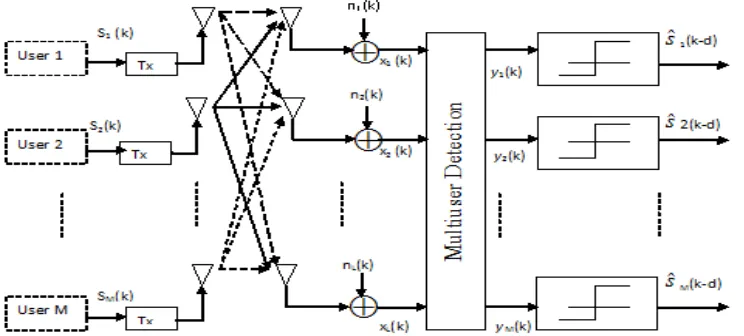
Consider a MIMO system employing M users with a single transmit antenna each and as entire receiver assisted by an L-element antenna array, shown in the Fig 1. For the M users supported in the system, the transmitted samples at the symbol rate are sm(k)=[sm(k) sm(k+1) sm(k+2) …..]
T
, 1≤m≤M, where sm(k) is the k th transmitted symbol of the user m. At the L receive antennas, Gaussian white noises are introduced. For the lth receive antenna, nl(k), an independently identically distributed complex-valued Gaussian white noise process with E[nl(k)] = 0 and E[|nl(k)|2] = 2
n2 is added to the noise-free part of the lth receive antenna’s output( )
l
x k
. Then the received signal samples xl(k) at the symbol rate for 1 ≤ l ≤ L are given1 , , 1 0 ( ) ( ) ( ) ( ) ( ) n M c
l i l m m l l l
m i
x k c s k i n k x k n k
(1) where C T l,m 0,l,m 1,l,m n -1,l,m
c
= [c
c
c
]
denotes the tapvector of the CIR connecting the user m and the lth receive antenna . In BPSK modulation each user sm(k)
{
1} has the equal transmit power of E[|sm(k)}2] = s2 = 1.1 , , 0 0 ( ) ( ) n L F
m i l m l
l i
y k w x k i
(2) For
1
m
M
, where1
,
[
0, , 1, , F , ,]
T l m l m l m n l mw
w
w
w
denotes the mth user detector’s equalizer weight vector associated with the lth receive antenna. The M user detectors’ decisions are defined byFor 1mM,
where ,
[
0, , 1, , 1, ,]
T l m l m l m nF l m
w
w
w
w
denotes the mthuser detector’s equalizer weight vector associated with the lth receive antenna. The M user detectors’ decisions are defined by
ˆ (m ) sgn( R ( )),1 m
s kd y k mM (3)
Where ˆ (sm kd)is the estimate of sm(kd),yR m( )k [ym( )]k denotes the real part of ym( )k , and sgn(
) the sign function. Again for notational simplicity, we assume that each of the M detectors has the same decision delay d, and all the 0 d nF nc2. Let us define1, 2, ,
[ T T T ]T
m m m L m
w w w w (4)
( ) [ ( ) ( 1) ( 1)]T
l l l l F
x k x k x k x kn (5)
1 2
( ) [ T( ) T( ) L( )]T
x k x k x k x k (6) Then the output of the mth detector can be written as
, 1
( ) ( ) ( )
L H H
m l m l m
l
y k w x k w x k
(7) Let it is define the nF(nFnC1) CIR convolution matrix associated with the user m and lth receive antenna as shown in (14), and further introduce the overall system CIR convolution matrix as
1,1 1,2 1,
2,1 2,2 2,
,1 ,2 ,
m m
l l l m
c
c
c
c
c
c
c
c
c
c
(8)The received signal vector x(k) can be expressed by
x k( )Cs k( )n k( )x k( )n k( ) (9) where
( ) [ 1( ) 2( ) ( )] T L
n k n k n k n k (10) With n kl( )[n k n kl( ) l( 1)nL(knF1)]Tand s k( )[s1T( )k s2T( )k sMT ( )]k T (11) With sm( )k [sm( )k sm(k1)sM(knF nC2)]T
note that the output of the mth detector can be expressed as
( ) [1( ) 2( ) ( )]
T T T T
M
s k s k s k s k (12) With
s
m( )
k
[
s
m( )
k s
m(
k
1)
s
M(
k
n
F
n
C
2)]
T note that the output of the mth detector can be expressed as
( )
( ( )
( ))
( )
( )
Hm m m m
y k
w
x k
n k
y
k
e k
(13) where ( )km
e is Gaussian distribution function having zero mean
3. Widrow-hoff algorithm
Artificial neural systems computation lies in the middle ground between engineering and artificial intelligence. The mathematical techniques utilized, such as mean-square error minimization. A new powerful learning rule called the Widrow-hoff learning rule was developed by BERNARD Widrow and Marcian Hoff (1960, 1962). The rule minimized the summed square error during training involving pattern classification.
The neural network can also be defined as interconnection of neurons, such neuron outputs are connected, through weights, to all other neurons including themselves; both lag-free and delay connections are allowed. A network can be connected in cascade to create a multilayer network. In such network, the output of a layer is the input to the following layer is called feed forward. A feedback network can be obtained from the feed forward network by connecting the neurons outputs to their inputs.
0. . 1, , 1, ,
1, , 0. . 1, ,
,
1, , 1, ,
0. .
0
0
0
0
0
0
l m l m nC l m
nC l m
l m l m
l m
l m n l m
l m C
c
c
c
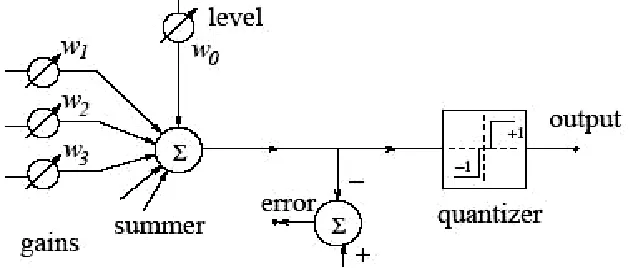
The Widrow-Hoff learning rule is applicable for the supervised training of neural networks. It is independent of the activation function of neurons used since it minimizes the squared error between the desired output value di and the neutron’s activation value neti = wi
t
x. The learning signal for this rule is defined as follows
t i i
r
d
w x
(15)The weight vector increment under this learning rule is
( t )
wi c di w x wi
(16)
or, for the single weight the adjustment is
( )
, t
wi j c di w x wi j
for j=1,2, ……, n
This rule can be considered a special case of the delta learning rule. Indeed, assuming that, or the activation function is simply the identity function it becomes identity to (15). This rule is sometimes called LMS (least mean square) learning rule. Weights are initialized at any values in this method.
4. Adaptive filtering
The ADALINE network, much like the perception, can only solve linearly separable problems. It is, however, one of the most widely used neural networks found in practical applications. Adaptive filtering is one of its major application areas.
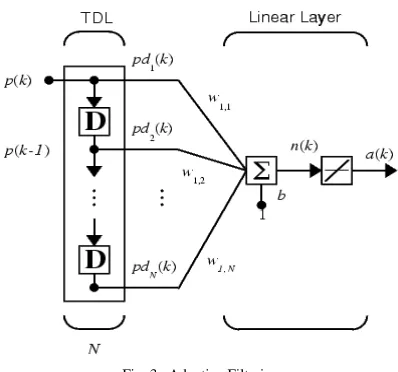
Tapped Delay Line
It need a new component, the tapped delay line, to make full use of the ADALINE network. Such a delay line is shown in the next figure. The input signal enters from the left and passes through N-1 delays. The output of the tapped delay line (TDL) is an N-dimensional vector, made up of the input signal at the current time, the previous input signal, etc. You can combine a tapped delay line with an ADALINE network to create the adaptive filter shown in the next figure 3.
Fig. 3. Adaptive Filtering
The output of the filter is given by
( ) ( ) 1, ( 1)
1 R
a k purelin wp b w a k ii b i
(16) 5. Steps to minimizing BER using Widrow-Hoff and Adaptive filtering
Step: 1 Generate the data of three users and encode to BPSK modulation and transmit through channel. Step: 2 Give the received data as input to the equalizer
Step: 3 Initialize the weight vectors
Step: 4 Calculate the error and update the new weight
Step: 5 Give the received and target as input to the WIDROW-HOFF/ADAPTIVE learning algorithm(s) to calculate the next iteration weight. Go to step 4
Step: 6 Calculate the output obtained from the learning algorithm and plot the results. Step: 7 STOP.
6. Simulation Result
The system used in our simulation supported M = 3 users with L = 4 receiver antennas. All three users had an equal transmit power. The ML = 12 CIRs are listed in Table 1, each CIR having number of tapping, nc = 2 taps. The CIRs used in stationary channel are extensions of the often-used single-input single-output (SISO) CIRs proposed by Proakis in his book, which were extended to the MIMO scenario considered. In the actual simulation, all 12 CIRs were normalized to provide to unit channel energy, i.e., ||Cl,m||
2
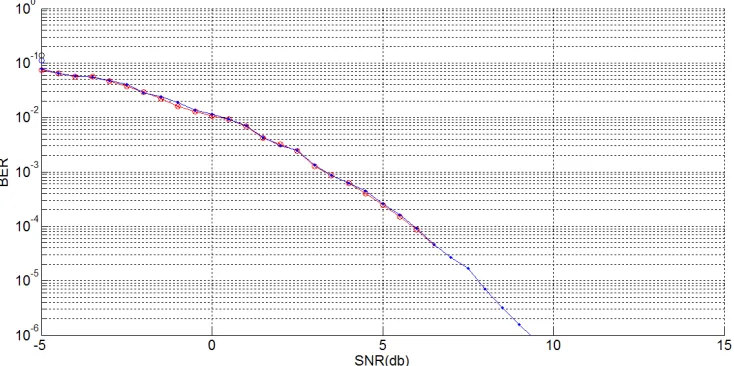
In the below shown graphs from Fig. 4 to Fig. 6 the blue line shows the Adaptive filtering algorithm and the red line shows the Widrow-Hoff algorithm. The BER rate convergence is same in all the figures but the rate of convergence is more in case of adaptive learning.
Fig. 4. BER comparison of Widrow-Hoff and Adaptive Filtering based MUD for 3 user and 4 antenna stationary system for user 1
Fig. 5. BER comparison of Widrow-Hoff and Adaptive Filtering based MUD for 3 user and 4 antenna stationary system for user 2 Table 1. CIRs for the 3-user 4-antenna stationary system. Simulated CIRs were cl m, ( ) / |z cl m, ( ) |z to provide unit channel energy
( ) ,
cl m z m1 m2 m3
1
l ( 0.5 j0.4)(0.7 j0.6)z1 ( 0.1 j0.2)(0.7 j0.6)z1 ( 0.7 j0.9)(0.6 j0.4)z1
2
l (0.5j0.4) ( 0.8j0.3)z1 ( 0.3 j0.5) ( 0.7j0.9)z1 ( 0.6 j0.8) ( 0.6 j0.7)z1
3
l 1
(0.4j0.4) ( 0.7 j0.8)z ( 0.1 j0.2)(0.7 j0.6)z1 (0.3 j0.5)(0.9 j0.1)z1
4
l 1
Fig. 6. BER comparison of Widrow-Hoff and Adaptive Filtering based MUD for 3 user and 4 antenna stationary system for user 3
7. Conclusion
MUD based on the neural network has been investigated for multiple-antenna-aided SDMA systems. A novel Widrow-Hoff and adaptive filtering designs have been derived. It requires half of the computational complexity needed by the Widrow-Hoff algorithm for BPSK signaling compared to the Adaptive filtering. The simulated results have demonstrated that the adaptive algorithm assisted MUD converges faster than and as consistent as WIDROW-Hoff algorithm and achieves BER performance faster.
References
[1] Blogh, J. S; Hanzo, L. (2002): Third Generation Systems and Intelligent Wireless Networking—Smart Antenna and Adaptive Modulation. Chichester, U.K.: Wiley.
[2] Chen, S; Hanzo, L; Ahmad N. N; Wolfgang A. (2004) :Adaptive minimum bit error rate beamforming assisted QPSK receiver, in Proc. IEEE Int. Conf. Commun., vol. 6, pp. 3389–3393.
[3] Chen, S; Hanzo, L; Mulgrew, B. (2004): Adaptive minimum symbol-error-rate decision feedback equalization for multi-level pulse-amplitude modulation, IEEE Trans. Signal Process., vol. 52, no. 7, pp. 2092–2101.
[4] Chen, S; Hanzo, L; Mulgrew, B. (2004): Adaptive minimum symbol-error-rate decision feedback equalization for multi-level pulse-amplitude modulation, IEEE Trans. Signal Process., vol. 52, no. 7, pp. 2092–2101.
[5] Hanzo, L; Yang, L. L; Kuan,E.-L; Yen, K. (2003) :Single- and Multi-Carrier DS-CDMA. Multi-User Detection, Space-Time Spreading, Synchronization, Standards and Networking. New York: IEEE Press/Wiley.
[6] John J. Hopfield, Artificial Neural Networks, IEEE Circuits and Devices Magazine, 1988, pp.3-10. [7] MATLAB/SIMULINK ver. 7.6
[8] Tsoulos, G; Beach, M; McGeehan, J. (1997) wiireless personal communications for the 21st century: European technological advances in adaptive antennas, IEEE Commun. Mag., vol. 35, no. 9, pp. 102–109.
[9] Widrow. B; Lehr, M. A. (1990):30 years of adaptive neural networks: Perception, madaline, and backpropagation, Proc. IEEE, vol. 78, pp. 1415-1442.
[10] Winter, J. H ; Salz, S. J; Gitlin, R. D. (1994) :The impact of antenna diversity on the capacity of wireless communication systems, IEEE Trans. Commun., vol. 42, no. 2–4, pp. 1740–1751.
[11] Widrow, B.; winter, R. (1998): Neural nets for adaptive filtering and adaptive pattem recognition,” IEEE Computer, vol. 21, pp. 25-39, 1988.