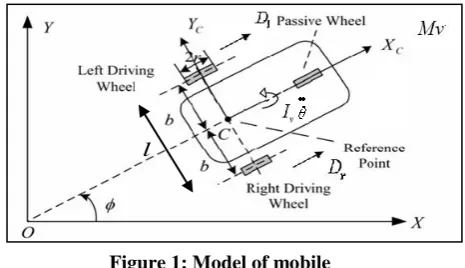
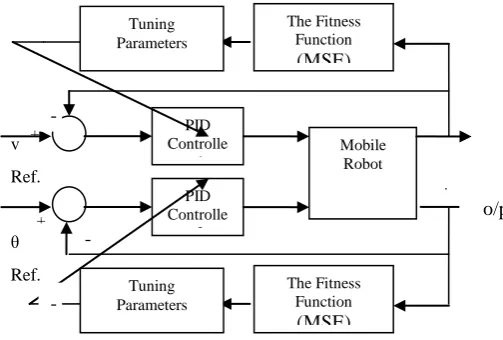
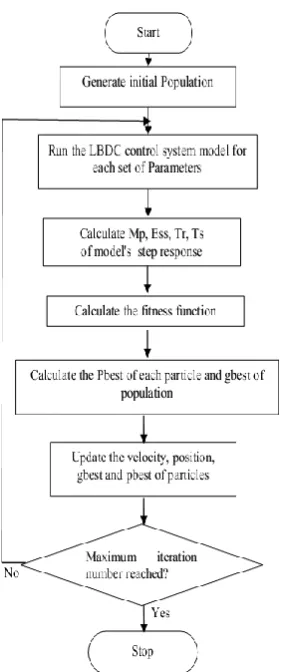
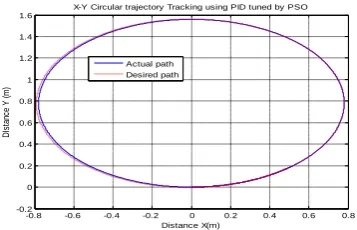
PSO based Optimum Design of PID Controller for Mobile Robot Trajectory Tracking
Full text
Figure
Related documents
As a part of that research this paper presents an in depth analysis of face recognition system based on Local Binary Pattern(LBP), Local Configuration Pattern
Dimethyle solfoxide (DMSO) ةسارد دنع. ةلمعتسملا ايرتكبلا دض هتيلاعف 5 - لاعفلا تابكرملا نع فشكلا ة صلختسم يف قاروا : ردسلا تابن رامثو A - تساب متو تاديولقلا نع فشكلا
The present case reports describes the successful ma- nagement of a severe chest trauma in a 55 year-old pa- tient who sustained a complete “bony disruption” of the thoracic
Tingkat efektivitas Program Pengembangan Usaha Agribisnis Pedesaan (PUAP), kualitas fasilitas yang diterima peserta BLM PUAP dan kualitas sumberdaya manusia pengelola
Genetic algorithm merged with parallel computing gives optimal performance in terms job scheduling.. The energy consumption is minimized as the phases of Genetic
Identification of a plasmid encoding SHV-12, TEM-1, and a variant of IMP-2 metallo-  -lactamase, IMP-8, from a clinical isolate of Klebsiella pneumoniae. Prevalence of SHV-12
Variance in male reproductive success: The potential for differences in male reproductive success was esti- mated indirectly by comparing the frequency distribu-
Security threat groups pose significant problems for institutional security as illustrated by Federal Bureau of Prisons research that suggests security threat group members are
