Procedia Technology 25 ( 2016 ) 399 – 404
ScienceDirect
2212-0173 © 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/).
Peer-review under responsibility of the organizing committee of RAEREST 2016 doi: 10.1016/j.protcy.2016.08.124
Global Colloquium in Recent Advancement and Effectual Researches in Engineering, Science and
Technology (RAEREST 2016)
Classification Analysis of Topographical Features Using
Artificial Neural Network
Krishnan.R
a, Andhe Dharani
b* aResearch Scholar, VTU Research Centre, Department of MCA, R.V College of Engineering, Bangalore,Karnataka-560059, India
bProfessor, Department of MCA, R V College of Engineering, Bangalore, Karnataka-560059, India
Abstract
Identification and classification of the topographical features is a challenging topic in the field of image pattern recognition. Improvement is required in the existing crater detection algorithms because of the pattern types and complexity. Currently more than 500 images are transmitted to earth with a resolution of 5 to 100 meters. The artificial neural network plays an important role in training and classification of image patterns. This paper deals with analysis of crater detection with back propagation algorithm with training and classification, and analysis of execution time for classification of craters.
© 2015 The Authors.Published by Elsevier Ltd.
Peer-review under responsibility of the organizing committee of RAEREST 2016.
Keywords:crater detection; backpropagation algorithm; artificial neural network
1.Introduction
The learning algorithm plays an important role in pattern classification particularly if the image object varies its features. The topographical features used for training and classification are central peak and domed crater types. These two craters have an outer ring with a center feature. Classification of these two patterns is discussed here with artificial neural network using back propagation algorithm. Training of the neural network uses topographical images with the consideration of different transformations like rotation and scaling. This neural network trained images with 10 x 10 pixels and more. The analysis of training of image pattern, classification of pattern is studied here.
* Krishnan.R. Tel.: +91-80-67178093; fax: +91-80-2860-8011.
E-mail address:[email protected]
© 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/).
2. Literature Survey
The recognition techniques are divided into two categories: unsupervised and supervised. The unsupervised techniques use crater rims which extracts circular or elliptical features where as the supervised methods use machine learning concepts to train an algorithm into detecting craters. Many crater detection algorithms uses Hough transform, genetic algorithms, radial consistency algorithm which are identifies regions of rotational symmetry. The preprocessing uses edge-, texture measures and edge direction analysis. The digital elevation model is used along with imagery data to detect craters, which has curvature module, segmentation module and identification module. All the crater are classified into three categories based on radius r, small (5<r<13), medium (14<r<rmax/2) and large ((rmax/2)+1 < r<rmax) with the detection percentage of 64% and quality 31% [1].
The Kanade-Lucas-Tomasi (KLT) algorithm used for autonomous craters detection from planetary image by computing image gradient of each pixel It uses the continuous function at x and y position as shown in equation (1) and (2).
2
)
,
1
(
)
,
1
(
)
,
,
(
x
y
t
I
x
y
I
x
y
I
x eq (1)2
)
1
,
(
)
1
,
(
)
,
,
(
x
y
t
I
x
y
I
x
y
I
y (2)With the minimum eigen value of the pixel in the image, circle and elliptical characteristics are used for detecting craters [2].
In Boosting Approach, five types of masks are used for feature extraction, here by probing each image block B with the set of ternary masks ɸ(x), the corresponding feature is given by in the equation (3)
³
2 ] 1 , 0 [)
(
)
(
)
(
B
B
x
x
dx
f
I
( (3)which detects craters greater than 7 pixels [3].
The transformation is applied to the first image, Cin, and the best match with the second one, Cref is achieved by using the equation (4).
¦
z0 ) , ( , : ) , ())
,
(
(
1
)
(
y x I y x AT
x
y
I
n
T
MOM
(4)Where MOM denotes the measures of match, T is the transformation for the x and y coordinates in the image [4]. Another method for crater detection from digital topography data by using gradient orientation, morphometry vote analysis, slip tuning and calibration, fuzzy based edge detection, fuzzy RH transform, space analysis, depth/diameter ratio, circularity analysis of values in the topography data for crater rim, circularity analysis of votes in the parameter space and slip tuning of crater [5].
In the marked point process [6], used the image gradient Ig, X is process configurations x of objects, each belongs to a set space S = P x K, where P indicates position space and K is the space of marks. The correlation measure is used to find the similarity energy Us between the data Ig and the current configuration x is defined in equation (5)
|
0
)}
,
(
:
)
,
{(
|
|
}
1
)
|
,
(
&
0
)
,
(
:
)
,
{(
|
)
|
(
z
z
v
u
I
v
u
x
v
u
v
u
I
v
u
x
I
U
g g g s (5)Where u and v are the spatial coordinates in the image.
The Hough accumulator and characteristic points called ‘seed points’ used for segmentation, and these detected seed points are then used in watershed algorithm for crater detection. This process of measurement results in 81% of crater detection rate [7].
The bounding ellipse algorithm and reconstruction of ellipse in an image which uses ellipse characteristics for crater detection; it uses sun angle greater than or equal to 10 degrees which gives 77% accuracy. This algorithm models a crater as a disc, and reconstruct an ellipse or circle in two dimensional plane to determine the alignment or position of crater relative to the space craft [8].
Another algorithm uses concentric circle patterns of contours to detect craters; the step involves fitting contours with ellipse with their sizes, center position and direction of semi major axis. Here the detection rate 80% for crater has more than 30 pixels as diameter; larger than 200 m, and 100% for crater has larger than 300 m, the detection rate decreases if the diameter decreases [9].
By identifying shadow and highlight regions combined and formed a framework, which is then used for extracting feature. From the extracted features applied supervised learning algorithm to classify the crater. Feature modue has light and dark region which indicates crater’s highlight part and shadow part mainly used in supervised techniques [10]
3.Methodology
The back propagation algorithm [11] used here to train topographical images, and developed the classification model to classify domed and central peak crater images. Assume the layers are k = 0, …, K, with k=0 denoting the
input layer, and k = K denoting the output layer. The output of node j in layer k is denoted xj(k) for j =1, …, Mk, where
Mk is the number of nodes in layer k. In particular, in the input layer node j passes its input xj along as its output: xj(0)
= xj for j =1,…,M0. In every layer, except the output layer, the bias node output 1, so x0(k) = 1 for k=0, …, k-1. The
outputs are xj(K) for j =1,…, MK. The weight of the connection from node I in layer k-1 to node j in layer k is denoted
) (k ij
w
.
The Back-Propagation Algorithm
1. Initialize the weights
w
ij(k)to small random values, and choose a positive constant c.2. Repeatedly set x1(0),…., xMo(0) equal to the features of samples 1 to N, cycling back to sample 1 after sample
N is reached
3. Feed forward Step: For k =0, ..., K-1, compute
¸
¹
·
¨
©
§
¦
k k i k ij M i x W k jR
x
0 ) 1 ( ( 1) ( ))
(6)For nodes j = 1, … MK+1. Use the sigmoid threshold function R(s) = 1/ (1+e-s).
4. Back Propagation Step: For the nodes in the output layer, j = 1,…, Mk, compute
)
)(
1
(
() ( ) ) ( ) ( j k j k j k j k jx
x
x
d
G
(
(7)Forlayers k = K - 1,…,1 compute
¦
1 ( 1) 1 ) 1 ( ) ( ) ( ) ()
1
(
k k ij M j W k i k i k i k ix
x
G
G
(
(8) For i = 1, … , Mk 5. Replacew
ij(k)by
) 1 ( ) ( ) ( k ix
c
w
jk k ijG
for all i, j, k6. Repeat steps 2 to 5 until the weights
w
ij(k)cease to change significantly.
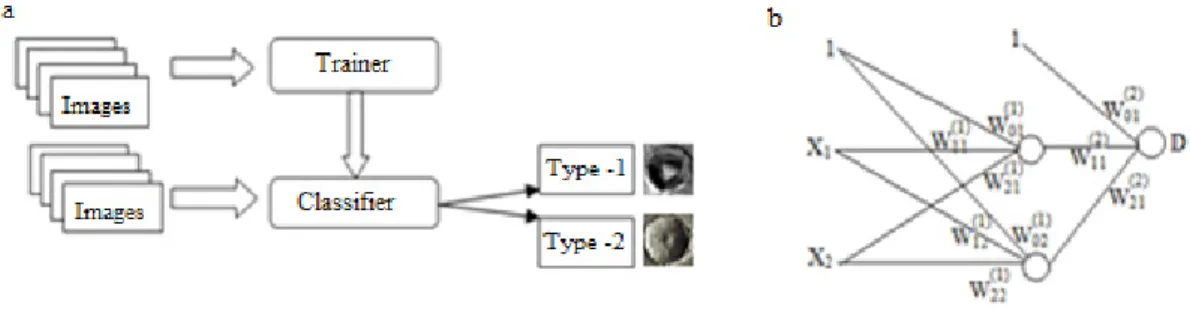
The training time of each image is evaluated based on transformations like size and rotation. The learning time, and the efficiency is calculated for each images. The execution time and the accuracy is evaluated for classification of images, the block diagram is shown in Fig. 1.
Fig. 1. (a) Block diagram of Training and classification; (b) Artificial Neural Network with hidden layer.
4.Result and Analysis
Classification of these two patterns is discussed here with artificial neural network using back propagation algorithm. Training of the neural network uses topographical images with the consideration of different transformations like rotation and scaling. This neural network trained images with 20 x 20 pixels and more. The analysis of training of crater image is shown in Fig.2.
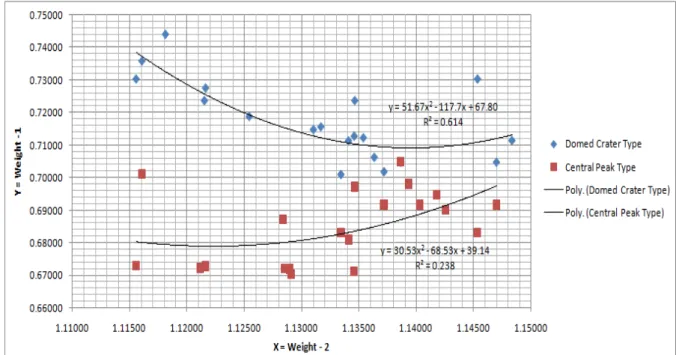
Classification pattern of two patterns are shown in Fig.3. How the data are fitted in the polynomial equations and the corresponding R2 values are shown here for two categories of crater. Using the learning technique, the classification accuracy 85% is experimented. The R2 values of domed and central peak craters are 0.614 and 0.238 respectively.
Fig. 3. Classification of Two Types of Crater Images
The variations of R2 values of two categories of crater images with different functions are shown in Table 1. It shows the comparison with linear, exponential, polynomial, power and logarithmic. Here polynomial functions are with higher R2 values 0.614 for domed crater and 0.238 for central peak crater.
Table 1. R2 Values of Domed Vs Central Peak Crater
Functions Domed Crater Central Peak Crater
Linear 0.447 0.185
Exponential 0.446 0.187 Polynomial 0.614 0.238
Power 0.449 0.186
Logarithmic 0.450 0.184
Among these values polynomial function gives better accuracy compared to other functions. The corresponding R2 values are also calculated.
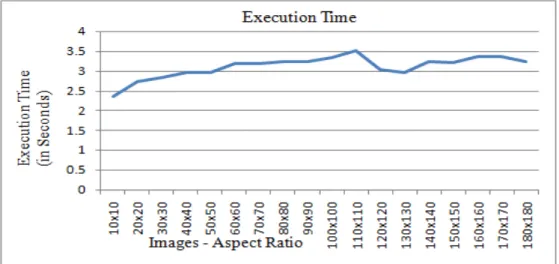
The execution time for both the images and each image of 20 iterations are shown in the Fig 4. The evaluation of execution time is done for images from 10x10 to 180x180 pixels. And found that the average time is 3.09912 seconds.
Fig. 4. Execution Time Analysis of Different Image Size
5.Conclusion
The classification of two crater images is done successfully with a classification rate of 85%, and also the execution time, R2 values for each category are analyzed. The average execution time for classification is 3.09912 seconds. The execution times variations are analyzed depending on the aspect ratio of the crater image.
References
[1] Brian D. Bue, Tomasz F. Stepinski, ‘Machine Detection of Martian Impact Craters From Digital Topography Data’, IEEE Transaction on Geoscience and Remote Sensing, Vol. 45, No.1, 2007, pp. 265-274
[2] Ding Meng, Cao Yun-feng, Wu Qing-xian, ‘Autonomous Craters Detection from Planetary Image’, IEEE 3rd international conference on
Innovative Computing Information and Control (ICICIC’08), 978-0-7695-3161-8/08, 2008
[3] Ricardo Martins, Pedro Pina, Jorge S. Marques, Margarida Silveira, ‘Crater Detection by Boosting Approach’, IEEE Geoscience and remote
sensing letters, Vol. 6, No.1, 2009, pp. 127-131
[4] G.Troglio, J.A Benediktsson, G.Moser, S.B.Serpico, J.Le Moigne, ’Automatic Extraction of Planetary Image Features’, 3rd IEEE International
Conference on space mission challenges for information technology’, 978-0-7695-3637-8/09, 2009, pp. 211-215
[5] Goran Salamuniccar, Sven Loncaric, ‘Method for Crater Detection From Martian Digital Topography Data Using Gradient Value/Orientation,
Morphometry, Vote Analysis, Slip Tuning, and Calibration’ IEEE Transactions on Geoscience and Remote Sensing, Vol. 48, No.5, 2010, pp. 2317 – 2329
[6] Giulia Troglio, Jon A. Benediktsson, Gabriele Moser, Sebastiano B. Serpico, ‘Crater DetectionBased on Marked Point Processes’, IEEE
conference – IGARSS, 2010, pp. 1378-1381
[7] Giulia Troglio, Jacqueline Le Moigne, Jón Atli Benediktsson, Gabriele Moser, Sebastiano B. Serpico, ‘Automatic Extraction of Ellipsoidal
Features for Planetary Image Registration’, IEEE Geoscience and remote sensing letters, Vol.9, No.1, 2012, pp. 95-99
[8] Nur Diyana Kamarudin, Siti Noormiza Makhtar, Hizrin Dayana M.Hidzir, ‘Craters Detection on Lunar’ IEEE International Conference on Space Science and Communication (IconSpace), Malaysia, 2011, pp. 190-195
[9] Shin Sato, Noriaki, Asada, Hirohide Demura, Naru Hirata, ‘Extraction of Craters as Concentric Circle Patterns of Contours on the Lunar Digital Terrain Model’, IEEE conference – IGARSS, 2011, pp. 503-506
[10] Xindong Wu, Kui Yu, Wei Ding, Hao Wang, Xingquan, ‘Online Feature Selection with Streaming Features’, IEEE Transaction on Pattern Analysis and Machine Intelligence, Vol 35, No.5, 2013, pp. 1178-1192