65 Available online at www.ijiere.com
International Journal of Innovative and Emerging
Research in Engineering
e-ISSN: 2394 - 3343 p-ISSN: 2394 - 5494
Limit Switch Operated Electric Wheelchair for Quadriplegic
Patients
Snehlata Yadav 1
a, Poonam Sheoran 2
aa. Deenbandhu Chhotu Ram University of Science and Technology Murthal-131039
ABSTRACT:
Millions of people in the world face the problem of disability due to paralysis of various degrees. Paralysis disables the people from performing various common functions due to impairment of nervous system. This paper is about designing the wheelchair especially for quadriplegic patient. Quadriplegia is caused by damage to the brain or the spinal cord at a high level the injury, known as a lesion, causes victims to lose partial or total function of all four limbs. Our project electric wheelchair basically work on the principle of transducer, 3 limit switch as that generate electric signal with reference to neck rotation which will decide to move in desired direction (left, right, and front). The wheelchair unit is controlled using ATmega328 controller.
Keywords: HCI-Human Computer Interface, HMI-Human Machine Interface
I. INTRODUCTION
The aim of this project is the implementation in wheelchair direction control mechanism with minimum user efforts. The patient’s dependency level on the assistive technology is aimed to be brought down to approximately zero level or in other words, we can say that the patient should be totally independent. Electric wheelchairs are designed and very much used for the patients who are not able to walk normally due to spinal cord injury or some other age related walking disabilities (permanent or under treatment). This prototype of electric wheelchair is a single step towards achieving the similar objective.
The idea is to create a head control system which allows movement of the patient’s wheelchair depending on the head movements. We know that a person suffering from quadriplegia can partially move his eyes and tilt his head, thus, this system presents an opportunity for detecting those movements. We have created a device where a patient sitting on the wheel chair assembly with slight movement of head, is able to move in desired direction just by turning neck in that direction. The limit switches generate electrical signals with reference to head movements, which will then guide the motors to move in a particular direction. The system is cost effective and thus can be used by patients spread over a large economy range. [1]
II. BACKGROUND
There are different control mechanisms or methodologies available for operating wheelchair for quadriplegic patients. In all these methodology human machine interface and human computer interface are the most advance. Quadriplegic patient can control wheel chairs through voice recognition, eye-gaze tracking, or by tracking the movement of head/neck by using digital compass, accelerometer, gyroscope and some are operated through biological signals like ECG, EMG and EOG etc. But there are some issue with currently available wheelchair such as Eye tracking wheelchair operator is not free to visualize the adjacent surroundings when system is active, and voice recognition based wheelchair cannot be operated properly in noisy environment, [2,] In accelerometer controlled wheelchair patient need to tilt his head in forward, backward, left and right for forward backward and left right movements. Some time users (have not fine control on) are not able to tilt his neck. There is calibration problem with digital compass and gyroscope sensor. [3] Patient requires more training and attention to operate biological signal controlled wheelchairs. These technologies are already included in wheelchairs which are made for the purposes. We have selected limit switch because their accuracy and good calibration, another one only 2 neck movements are required (neck movement left and right). Proposed wheelchair overcome all these issues with minimum user effort and suitable for all situations. [4, 5]
III.PROPOSEDSYSTEM
66
IV. SYSTEM DESIGN
a.
Hardware requirements
ATmega328 microcontroller
It is the main part of wheel chair control system. Atmega 328 is 8 bit high performance low power RISC microcontroller. It has 28 pin PDIP package with 23 I/O lines. It has 131 Powerful Instructions, 32K Bytes of In-System EEPROM, 2K Bytes Internal SRAM, Self-Programmable Flash program memory, 1K Bytes 32 x 8 General Purpose Registers, Six PWM Channels, 6-channel 10-bit ADC. Its temperature range is -40°C to 85°C. Its special features include Power on Reset; interrupt source and Calibrated Oscillator, Six Sleep Modes: Idle, Power-save, Power-down, ADC Noise Reduction, Standby and Extended Standby. [8]
Limit switch
It is the act of detecting the presence or absence of an object with a contact or non-contact sensing device. After sensing sensors produce an electrical output signal that can be used to control equipment or processes. Limit switches are contact sensing devices widely used in industrial applications. The term limit switch is derived from the operation of the device it-self. As an object makes contact with the operator of the switch, it eventually moves the actuator to the "limit" where the electrical contacts change state. Through this mechanical action, electrical contacts are either opened (in a normally closed circuit) or closed (in a normally open circuit). [9]
L293D driver ICs
L293D is a motor driver ICs that contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneous, bi-directional control of 2 small motors both in forward and reverse direction. The operations of both motors can be controlled by applying input logic at input pins (2 & 7 and 10 & 15). Input logic 11 or 00 will stop the corresponding motor. Logic 10 and 01 will rotate it in anticlockwise and clockwise directions, respectively. [6]
Dc geared motor
It is a type of electrical motor that is designed to produce high torque with low horsepower, or low speed motor output. These motors are commonly used in home appliances, in handicap and platform lifts, medical and laboratory equipments, printing presses and packaging machinery. They reduce speed in a series of gears and in turn create more torque. So it is space-saving, consumes low energy reliable and durable. [7]
b.
Software requirements
AVRDUDE Software
AVRDUDE - AVR Downloader Up loader - is a program for downloading and uploading the on-chip memories of Atmel’s AVR microcontrollers. It can be used effectively via command line to read and Wright all chip memory type. It can program the EEPROM and Flash, and where supported by the serial programming protocol, it can program lock bits and fuse. AVRDUDE also supplies a direct instruction mode allowing one to issue any programming instruction to the AVR chip regardless of whether AVRDUDE implements that specific feature of a particular chip. Using AVRDUDE from the command line works well for programming the entire memory of the chip from the contents of a file. [10, 11]
V. ARCHITECTUREOFWHEELCHAIR
67
Figure 1 Operational Block Diagram
No Controller
Motor driver
Wheelchair
Limit switch
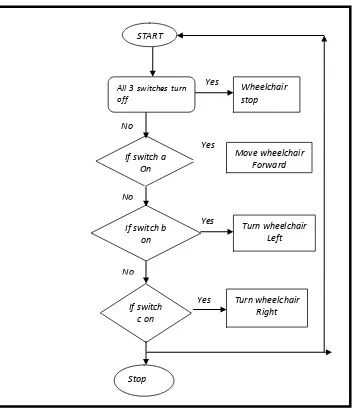
If switch c on If switch a
On
No
Yes
Yes
Yes All 3 switches turn off
Move wheelchair Forward
If switch b on
Stop
Turn wheelchair Left
Turn wheelchair Right START
Wheelchair stop
No
Yes
68
Figure 2 Working Flow Chart
TABLE 1 Direction Control Mechanism
Figure3. Hardware Setup
VI.CONCLUSION
During this project, it is necessary to conduct the exhaustive literature survey about the different types of
wheelchair available & what suits our objectives. In first part, prototype of electric wheelchair is designed and
analyzed. In second part, DC gear motor and limit switch are embedded on the general printed circuit board. In
third part, the program is written in device program window. After completion of coding, the debugging is done
& it is simulated its working proper or not. Conclusively, the project was worthful with positive result.
Direction Switch Motor 1 Motor 2 Free wheel
Forward Switch A Forward Forward Free movement
Left Switch B Forward Backward Free movement
69 VII. FUTURESCOPE
As a future scope, we can increase the number of motions of wheelchair & to make the system more interactive
with patient with the help of some additional sensors. We can make a wheelchair which can be operated by a
wireless control. Wireless operation can reduce wiring arrangements. We can also add the GSM/GPS module in
the system so that it can help to track the patient if any accident occurs as the patients would not be in a condition
to call someone.
VIII. REFRENCES
[1] “Eye Monitored Wheel Chair Control for people suffering from Quadriplegia”, Presented to the School of Electrical and Computer Engineering of Cornell University, May 2014
[2] Aruna, C.Dhivya Parameswari, A. Malini, M. Gopu, G., “Voice recognition and touch screen control based wheel chair for paraplegic persons”, IEEE, pp. 1-5, 6-8 March 2014
[3] A. Ruíz-Serranoa , R. Posada-Gómeza , A. Martínez Sibajaa , G. Aguila Rodrígueza , B.E. Gonzalez-Sancheza , O.O. Sandoval-Gonzaleza, “ Development of a dual control system applied to a smart wheelchair, using magnetic and speech control”, Iberoamerican Conference on Electronics Engineering and Computer Science ELSEVIER, Vol. 7, pp. 158 – 165, 2013
[4] Songfeng Guo , Cooper, R.A., Boninger, M.L., Kwarciak, A., “Development of power wheelchair chin-operated forcesensing joystick”, IEEE, Vol.3, pp.2373-2374, Oct 2002
[5] Snehlata Yadav, Poonam Sheoran, “Smart Wheelchairs - A literature review”, International Journal of Innovative and Emerging Research in Engineering Vol 3, Issue 2, 2016
[6] Rakhi A. Kalantri, D.K. Chitre, “Automatic Wheelchair using Gesture Recognition”, International Journal of Engineering and Innovative Technology (IJEIT,) Vol. 2, Issue 9, PP. 216-218, March 2013
[7] Srishti, Prateeksha Jain, Shalu, Swati Singh, “Design and Development of Smart Wheelchair using Voice Recognition and Head Gesture Control System”, International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, Vol. 4, Issue 5, PP-4790-4798, May 2015
[8] Humaira Salmin, Hafiz Rakibul, Pratik Kumar Kundu, B.M. Fahmid Jahur Shuvo, “Design and Implementation of an Electric Wheel-Chair to Economize it with Respect to Bangladesh”, international journal of multidisciplinary sciences and engineering, vol. 5, Issue 2, February 2014
[9] ATmega328 datasheet pdf available on website: www.atmel.com
[10]Limit Switches - 101 A basic guide to ABB’s limit switch portfolio pdf available on website: http://www.abb-control.com
[11]Sepehr Naimi (BIHE), “AVR Studio Software Tutorial”
available:http://www.microdigitaled.com/AVR/Software/AVRstudioTutorial.pdf
[12]Brian S. Dean, “AVRDUDE A program for download/uploading AVR microcontroller flash and eeprom”, available: