c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.orgRoute optimization in VANETs using soft computing algorithm
Harbhinder kaur
(Mtech scholar)&
Parvinder Singh
(Associate Professor) ECE., Rayat institute of engineering & information technology, Rail majra[email protected]
;
[email protected]
Abstract —
One of the most important aspects that determine the success of VANET is the reliable message routing from a source node to a destination node. Routing in VANET relies on the presence of a sufficient number of VANET nodes that constitute strong paths to also the forwarding of messages in the network. These paths can be affected by the vehicles mobility and traffic density, frequent network topology changes making them unsustainable and unreliable. Therefore, the design of an efficient routing protocol for VANET is considered to be a critical issue. Moreover, one of the most important requirements in the routing process is to share integrated data with road safety service in real time in order to provide the information passengers need to help them make safe decisions. Service guarantees are important in delivering messages with a maximum packet delivery ratio on one hand, and on the other hand with a minimum routing overhead and end-to-end delay. To get such good results a simulation is performed using an optimized hybrid bio-inspired bee swarm routing protocol in a network scenario of 50 nodes also the comparison graphs are represented in this paper.
Keywords— VANET; AODV; HyBR;
1. INTRODUCTION
VANET has been a very active field of research in the recent years, and many commercial applications have been envisioned in vehicular networks. As more and more vehicles are equipped with communication capabilities that allow inter-vehicle communication, large scale vehicular ad hoc networks are expected to be available in the near future. Efficient routing is the fundamental and most important issue for the wireless communications in VANETs. Multi-hop routing in vehicular ad hoc networks is useful to the mentioned scenarios. For example, in order together more information for repairing, embedded sensors in vehicles
can monitor their states send reports about the conditions of themselves to the remote repair shops while they are moving.
According to the estimation of travel time, vehicles send messages to a remote park or a restaurant for reservation.
A Vehicular Ad-Hoc Network is a technology that uses moving vehicles as nodes in a network to create a random node movement network. VANET converts every participating vehicle into a node, allowing nodes approximately 100 to 300 meters of each other to connect and in turn create a network with a wide range. As vehicles moves out of the signal range and drop out of the network, other nodes can join in connecting vehicles to one another so that a mobile Internet is created. The primary goal of VANET is to provide road safety measures where information about vehicle’s present speed, location coordinates are passed with or without the deployment of infrastructure communication. Types of VANET are Vehicle to Vehicle communication approach is most suited for short range vehicular networks. It is reliable and provides real time security. It does not require any roadside infrastructure.
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.org1.1 Communication Types:
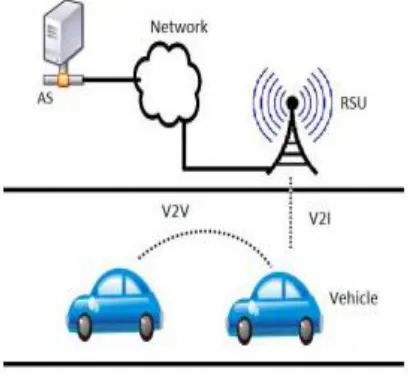
Vehicle to Vehicle (V2V) - Vehicle to Vehicle communication is suitable for short range vehicular network. It provides real time safety, fast and reliable. It does not need any roadside infrastructure. It is not very useful in case of sparsely connected network or low density vehicular network. In V2V warning messages are broadcast from vehicle to vehicle.
Vehicle to Roadside (V2R) -Vehicle to Roadside provides communication between vehicles and the roadside units. It makes use of pre-existing network infrastructure such as wireless access points. In V2R warning messages are send to roadside units and then from that roadside units warning messages send to the vehicles.
Vehicle to Infrastructure (V2I) - Vehicle to infrastructure communication provides longer rang vehicular network. Vehicle-to-infrastructure communications for safety is the wireless exchange of critical safety and operational data between vehicles and highway infrastructure, intended primarily to avoid vehicle crashes but also to enable a wide range of other safety, mobility, and environmental benefits. V2I communications apply to all vehicle types and all roads, and transform infrastructure equipmentinto “smart infrastructure” through the incorporation of algorithms that use data exchanged between vehicles and infrastructure elements to perform calculations that recognize high-risk situations in advance, resulting in driver alerts and warnings through specific countermeasures.
Fig 1.2 V2V and V2I communication
In VANET, the routing protocols are classified into five categories: Topology based routing protocol, Position based routing protocol, Cluster based routing protocol, Geo cast routing protocol and Broadcast routing protocol. These protocols are characterized on the basis of area /application where they are most suitable. In this paper we reviewed the various characteristics of VANET, its applications, various routing protocols including hybrid swarm intelligence routing.
1.2 VANETs APPLICATIONS
Safety Related Application: Safety related application area of the VANETs include the alert message about the traffic condition, accident, weather condition and other warning message which broadcast either by another node in the network or by the security services. The main issue is on timely distributation of safety critical alerts to nearby vehicles.
Internet Access Related: Accessing emails, web browsing, audio and video streaming are some of the internet related applications where the emphasis is on the availability of high bandwidth stable internet connectivity.
Value Added Services: VANET provides value added service for driver that includes radio channels access with different frequency ranges, Geographic Positioning Services .
Comfort applications: It allows the passengers to communicate either with other vehicles or with Internet hosts which improve passengers comfort. For example, VANETs provide Internet connectivity to vehicular nodes while on the move so the user can download music or play back-seat passenger games. Usually, some fixed or dynamic assigned network-to-Internet gateways are added to the networks, so they can deliver the messages between the VANET and the Internet.
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.org1.3 Vechicular Ad-Hoc Network Characteristics
Broadcasting is the task of sending a message from a source node to all other nodes in the network which is referred as data dissemination. Nodes are equipped with one or many wireless transceivers. Network that contains these nodes is called a Vehicular Ad-hoc Network (VANET) with characteristics that can be summarized under the following characteristics:
Packet loss: As received transmission power levels, co-channel interference levels and wireless connectivity vary highly depending upon time and nodes relative position in different environments, packet loss varies significantly. Rapidly Changing Network Topology: Due to high node mobility, the network topology in VANETs tends to change frequently.
Unbounded Network Size: VANETs could involve the vehicles in one city, several cities, or even a country. So the VANETs network should not be dependent on the number of the nodes.
Delay-sensitive Data Exchange: In the VANETs network the message transfer should be transfer without delay because security related application need message delivery without any delay.
High mobility and frequent topology changes: Nodes potentially move with high speed. Hence in certain scenarios such as when vehicle pass each other, the duration of time that remains for exchange of data packets is rather small. Also, intermediate nodes in a wireless multi-hop chain of forwarding nodes can move quickly.
High application requirement on data delivery: Important VANET applications are for traffic safety to avoid road accidents; potentially including safety of-life. These applications have high requirements with respect to real time and reliability.
Dynamic Topologies: The speed and choice of route defines the dynamic topology of VANET. The topology changes with time and consist of both bidirectional and unidirectional links that lost only a few seconds and can be frequently disconnected.
Security: This is a crucial aspect in vehicular networks and requires robust protocols to secure private data transfer over the network.
2. ROUTING PROTOCOLS IN VANETS
The characteristic of highly dynamic topology makes the design of efficient routing protocols for VANET is challenging. The routing protocol of VANET can be classified
into two categories such as Topology based routing protocols & Position based routing protocols.
Proactive (table-driven) Proactive routing protocols are mostly based on shortest path algorithms. They keep information of all connected nodes in form of tables because these protocols are table based. Furthermore, these tables are also shared with their neighbors. Whenever any change occurs in network topology, every node updates its routing table.
Pros - No Route Discovery is required.
- Low Latency for real time applications.
Cons - Unused paths occupy a significant part of the available bandwidth.
Reactive (On Demand) Reactive routing protocol is called on demand routing because it starts route discovery when a node needs to communicate with another node thus it reduces network traffic.
AODV Ad Hoc On Demand Distance Vector routing protocol is a reactive routing protocol which establish a route when a node requires to send data packets. It has the ability of unicast & multicast routing. It uses a destination sequence number (DestSeqNum) which makes it different from other on demand routing protocols.
- It reduces excessive memory requirements and the route redundancy.
- AODV responses to the link failure in the network.
- It can be applied to large scale adhoc network.
-If intermediate nodes contain old entries it can lead inconsistency in the route.
-For a single route reply packet if there has multiple route reply packets this will lead to heavy control overhead.
- Because of periodic beaconing it consume extra bandwidth.
GEOGRAPHIC ROUTING PROTOCOLS Geographic routing is a routing that each node knows it’s own & neighbor node geographic position by position determining services like GPS. It doesn’t maintain any routing table or exchange any link state information with neighbor nodes. Information from GPS device is used for routing decision.
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.org& maintain active routes. It has two phases route discovery & route maintenance.
3.ROUTING OPTIMIZATION USING HYBR
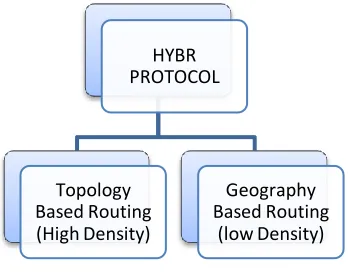
To address the drawbacks of topology-based and geography based routing approaches, the hybrid routing protocol called Hybrid Bee swarm Routing (HyBR) protocol for VANET has been designed. HyBr is a unicast and a multipath routing protocol which guarantees requirements of VANET safety applications HyBR combines two fundamental routing methods namely; topology-based routing and the geography-based routing in order to reap their benefits on one hand and avoid their drawbacks at the same time.
HyBR is a hybrid protocol which applies a topology-based routing approach when the network density is high (e.g., city-based VANET) and applies a geography-city-based routing approach when the network is not dense (e.g., highways). Using GPS devices, outdoors or through other means, each node saves the position information of all VANET nodes in a table called a positions table which is updated whenever the network topology changes. Moreover, each node possesses its own routing table which contains the various routes toward the desired destination. Only the next hop toward the destination is indicated. It has two categories as mentioned below:-
Fig 1.3 HYBR protocol
Topology Based Routing: Topology-based routing protocols have been applied to VANETs with the IEEE 802.11p standard which allows the transmission range upto 300 m at least in order to make the network more stable. Also, the routes used to disseminate data between vehicles have a short time of life compared with routes used by MANET nodes.
This situation conducts to Vehicular network partitioning. Consequently, discovering routes in this case of topology-based routing, the setup of topological end-to-end paths between a source and a destination before sending the packets is the fundamental step. These topology-based routing protocols can be reactive or proactive. The most common MANET routing protocol that has been applied to VANET is the Ad hoc On-demand Distance Vector (AODV) protocol. The route discovery method of AODV is based on routing tables which store the routes toward multiple destinations. Each destination is indicated using only the next hop node to reach this destination. The source disseminates a Route Request (RREQ) to its neighbors which in turn sends the same packet to their neighbors and so on, until the final destination is reached. Once the route request reaches the destination or an intermediate node which knows the path toward the destination, a Route Replay (RREP) is sent back to the source node through the reverse route. AODV uses a sequence number to discover fresh paths and to prevent routing loops.
Geography-based routing: Geography-based routing protocols have also been applied to VANET. They are also called position based routing protocols in which the node positions are used to route data between vehicles. They perform a recovery strategy to overcome the void case when there is no routing progress based on nodes’ position data. A strong feature of these network topology is that the packets are routed to the destination without the knowledge of the network topology or a prior route discovery. In contrast, the source should determine its own position in addition to the position of the destination.
3.1 Basic design of proposed work: HYBR
PROTOCOL
Topology Based Routing (High Density)
Geography Based Routing
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.orgThe process is initialized with selecting the mobility area it could be of any dimensions. This mobile area is further divide into subnets to perform routing in these regions. When routing is started the new enhanced optimizing algorithm is used with HYBR protocol for achieving better simulation results. Once the packet transmission is done with new routing protocol road safety metrics will be calculated. All these simulations are performed at NS-2 simulation platform. Once the whole simulation is conducted the results are compared with the previous parameters and the difference is calculated at the significant level.
3.2 Proposed algorithm
4. IMPLEMENTATION
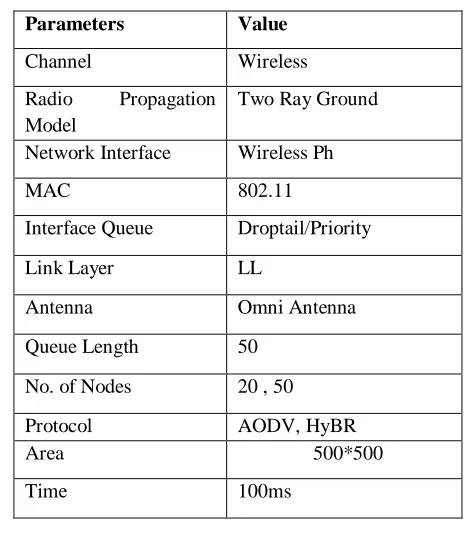
To implement this proposed solution we used Network Simulator 2. We test this proposed algorithm to different network scenario but here only discussed the scenario of 50 nodes with 500x500 areas. Vanet scenario is generated by using NS-2 with this defined configuration using optimized HyBR protocol and comparison of AODV, HyBR and Optimized HyBR based routing is analyzed by using different network parameters. The network setup is defined below in table 1.
Table 1: Simulation Setup
Parameters Value
Channel Wireless
Radio Propagation Model
Two Ray Ground
Network Interface Wireless Ph
MAC 802.11
Interface Queue Droptail/Priority
Link Layer LL
Antenna Omni Antenna
Queue Length 50
No. of Nodes 20 , 50
Protocol AODV, HyBR
Area 500*500
Time 100ms
Implementation in ns-2
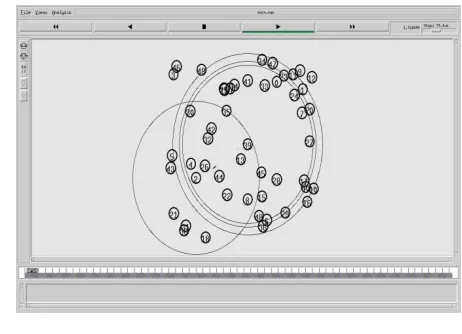
NS-2 is used to simulate the real moving behaviours of the nodes in Vehicular ad hoc network. The evaluation will be conducted with some specific number of nodes that will be randomly scattered in a specific region with specific number of connections. Figure 5.2 shows the Vanet Environment generated by using NS-2.
Input: No of nodes,route information Output: best_route
Start {
Initialize no of nodes If (area is geographical) {
//route selection by bee Best route=bee(no of nodes) //optimize by ACO
Best_ route=ACO (best route) }
Else (area is topological) {//route selection by GA Best route=GA(no of nodes) //optimize by ACO
Best_route=ACO(best route) }
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.orgRoute request
Figure 1.4 This shows how routes are requested in ns-2
Route discovery
Figure 1.5 This shows how routes are discovered in ns-2
Packet transmission
Figure 1.6 This shows how packet can move or how data can be move from one node to another node by using NS-2.
5. Results & Discussion
To simulate the real moving behaviours of the nodes in a mobile Vehicular adhoc network a simulation tool will used. The evaluation will be conducted with some specific number of nodes that will be randomly scattered in a specific region with specific number of connections. This simulation evaluates the protocol using the following performance metrics:
a) Routing overheads b) Packet delivery Ratio c) End to End Delay
Packet Sent: It is the number of packets sent by the application layer of source nodes.
Packet received: It is the number of packets received by the application layer of destination nodes.
Routing Overhead:The total number of routing control packets generated by all nodes to the total data packets during the simulation time
Figure 1.7: Routing overhead in AODV is highest among all and on the other hand for optimized hybrid routing it is lowest
Network Load: It is the total traffic received by the network layer from the higher MAC that is accepted and queued for transmission. It is measured as bits per second.
c e-ISSN: 2348-6848, p- ISSN: 2348-795X Volume 2, Issue 12, December 2015
International Journal of Research (IJR)
Available at http://internationaljournalofresearch.orgnumber of packet received by destination through the no. of packet originated from the source.
PDR = (Pr / Ps) * 100
Where, Pr is total packet received and Ps is total packet sent.
Figure 1.8:The packet delivery ratio is more in Improved optimized hybrid based routing
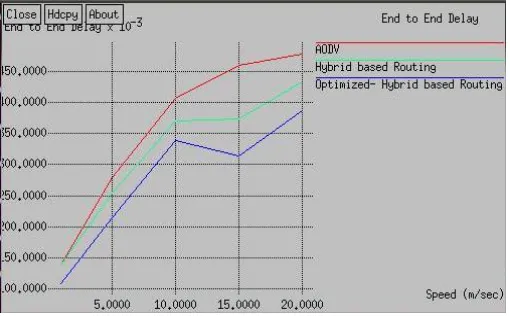
End to End Delay: This includes all possible delays caused by buffering during route discovery, latency, and retransmission by intermediate nodes, processing delay and propagation delay. It is calculated as
D = (Tr - Ts)
Tr is receive time and Ts is sent time of the packet.
Figure 1.9:End to end delay is less in optimized hybrid based routing.
CONCLUSION
VANET is a new technology which has taken enormous attention in the recent years. Due to rapid topology changing and frequent disconnection makes it difficult to design an efficient routing protocol for routing data among vehicles. The
existing routing protocol for VANET are not efficient to meet every traffic scenario. To achieve the timely dissemination of messages ,various routing protocols for VANETs have been proposed. We present an optimized hybrid Bee routing scheme for VANETs that will work both in more node density and low node density areas as well. The protocol combines the feature of topology routing with those of geographic routing. It is a unicast and a multipath routing protocol which guarantees road safety services by transmitting packets with minimum delay and high packets delivery. In the simulation results shown above in the graphs the performance of OHyBR is clearly visible, it has less end to end delay, routing overheads and more packet delivery ratio in comparison with the previous work.
REFERENCES
[1] Salim Bitam “A Hybrid Bio-inspired Bee Swarm Routing protocol for safety applications in Vehicular Ad hoc Network”, in Elsevier B.V. journal of system architecture,pp.953-967, 2013.
[2] Pratik Gujar “Bio inspired Routing protocol for Vehicular Hd hoc Network”, International Journal of Advancement in Research & Technology, vol.-3, ISSN 2278-7763, April-2014.
[3] A. Martin “A Hybrid Bee Swarm optimized Multicast Routing for Reducing Packet Loss in VANET”, IEEE-AINAS, Vol. 9(6), ppo.14-18, 2015.
[4] Siddhant Jaiswal “Hybrid Approach for Routing in Vehicular Ad hoc Network using Clustering Approach”, IEEE- IJIRCCE, Vol.1, Issue 5, July-2013.
[5] N. Perera Ovitigalage Prasad “Cross Layer Optimization of VANET Routing with Multi-objective Decision Making”,IEEE – ATNAC, ppo.1-6, Nov 2012.
[6] Chehung LIN “Fuzzy Road Situation Model Optimization Routing in Vehicular Ad hoc Network”, IEEE-Soft Computing and Intelligent System(SCIS), ppo. 532-537, Nov. 2012.
[7] Hyun Yu, Joon Yoo “A VANET Routing based on the Real-time Road Vehicle Density in the city Environment”, IEEE- Fifth
International Conference on Ubiquitous and Future
Networks(ICUFN), ppo. 333-337, July-2013.
[8] Manjot Singh Pandher “Delay Optimization in VANET using Ant Colony Optimization and Wimax”,International Journal of Computer Science and Information Technologies(IJCSIT), Vol. 5, 2014.s