© 2014, IJCSMC All Rights Reserved 112 Available Online at www.ijcsmc.com
International Journal of Computer Science and Mobile Computing
A Monthly Journal of Computer Science and Information Technology
ISSN 2320–088X
IJCSMC, Vol. 3, Issue. 3, March 2014, pg.112 – 120
RESEARCH ARTICLE
QOS ORIENTED NODE SELECTION
APPROACH IN AD-HOC ROUTING IN VANET
VIGNESHKANNA.B, M.MANIKANDAN
PG Scholar, Department of CSE, Adhiyamaan College of Engineering, Tamilnadu, India
Assistant Professor, Department of CSE, Adhiyamaan College of Engineering, Tamilnadu, India
Abstract
Vehicular ad hoc networks (VANETs) are highly mobile wireless networks that are designed to support vehicle safety. A Our new protocol combines features of on demand routing with position-based geographic routing in a manner that efficiently uses all the position data available. The protocol is provided to gracefully exit to on demand routing as the position information attaining low level.
In the paper, we have presented, a hybrid routing scheme that gracefully integrates the characteristics of on-demand and proactive routing, it shows more scalability for movement and collision load. We have demonstrated that new hybrid protocol provides well on demand routing protocols (such as AODV), Geo-routings (such as GPSR) and adaptive hybrid routing protocols (such as AODV) in high mobility and collision load. The improvement is more significant with higher mobility and collision load. We show through analysis that our protocol is scalable and has an optimal overhead, even in the presence of position errors. Our protocol provides an enhanced yet pragmatic location-enabled solution that can be deployed in all VANET-type environments. QOS-AR is simple to deploy and yet effectively obtains optimal scalability performance, making it an ideal candidate for the routing protocol in emerging VANETs. By selecting the forwarding So that we can reduces delay, increase energy and throughput
Index Terms-Geographic Information Systems, intelligent vehicles, routing protocols, wireless networks
I.INTRODUCTION
© 2014, IJCSMC All Rights Reserved 113
Recently, many works have provided in-depth studies of the VANET environment, including realistic mobility and propagation models [1]–[6]. These works highlight some of the key issues that state-of-the-art routing protocols face as applied to VANETs. The routing protocols in VANETs can be classified into the following two major categories [7]–[10]: 1) topology-based routing and 2) geographic (position-based) routing. Topology-based routing protocols use the link’s state information that exists in the network to perform packet forwarding. Many researchers have investigated the performance of various topology-based routing protocols within the vehicular environment, and their results have shown that the ad hoc on-demand distance vector (AODV) protocol[11] has the bestperformance and lowest routing overhead among all topology basedrouting protocols [12]–[14].
The common characteristicamong all topology-based routing protocols is that the performancedegrades as the network size increases, indicating thescalability problem [12].It is widely believed that geographic (or location-based) routing holds the key to the scalability problem. The main reason is that, because geographic routing protocols do not exchange any link-state information and do not establish and maintain any routing tables, they should operate under a much decreased routing overhead. As such, geo routing holds great promise for highly dynamic environments such as VANETs. In the field of VANETs, the forwarding decision by a vehicle using geographic routing is primarily based onthe position of the destination vehicle and the position of allvehicles’ one-hop neighbors.
The position of the destination is stored in the header of the packet that was transmitted by the source vehicle. The position of all vehicles’ one-hop neighbors is obtained by listening to the beacon packets that are periodicallysent between vehicles. Geographic routing assumesthat each vehicle knows its location, e.g., through an onboard Global Positioning System (GPS). Geographic routing also assumes that the sending vehicle knows the receiving vehicle’slocation. This condition requires an efficient location servicemanagement system that can keep track of the locations of thevehicles within the network [15]. It should be stated, however,that geographic routing has several issues, which has inhibitedits wide adoption-most important of which is that of locationerror.
Position errors can severely degrade performance in position-based forwarding schemes [16]–[18], making accuratelocation information a necessity for most geographic routingprotocols. In addition, geographic routing fails in the presenceof void regions, where a closer neighbor vehicle toward the destinationcannot be found. This case requires a backup procedure (e.g., perimeter or face routing) to overcome the void region. Unfortunately, with current backup procedures, packets oftentend to travel on longer paths to their destinations or get caught in a loop and be dropped .In VANETs, no single routing protocol will excel in allscenarios, and as such, a hybrid approach is likely to be morefruitful.
Therefore, here, we will adopt a hybrid design approach, where we combine features of reactive routing (AODV)with geographic routing. One key design issue of our protocolis to efficiently make use of all the location information. Available, to minimize the routing overhead, and to gracefullyexit to reactive routing as the location information degrades.One novel consequence of our protocol design is that our new protocol possesses effective routing strategies that are a spatialfunction of the location information quality. The main pointof the protocol is not to compete or replace current AODV type protocols but, rather, to enhance and complement existing AODV protocols as location information is made available tothe nodes. It is clear that hybrid forms of routing procedures along the lines presented here will become widely deployed asITS evolves.
© 2014, IJCSMC All Rights Reserved 114
metrics (beyond scaling) are affected by our protocol. More specifically, in Section II, we present our new hybrid protocol. Section III offers the analysis of our hybrid protocol and a standard reactive protocol. The results of simulations and the predictions from analysis are discussed in Section IV.
Note that we will not claim to have developed in this paper the most efficient routing protocol under all location error conditions. In principle, any non-scaling protocol P (beyond the approach that we use as follows, i.e., AODV- PBR) can be encapsulated as the hybrid part of AR, forming a new version of AR, e.g., QOS-AR’. However, the design of QOS-AR’ would have to follow the same design principles that we outline as follows, e.g., a graceful exit to P as the location quality degrades. If a stand-alone P has better performance than standalone AODV- PBR, then in the limit of very large location error, the performance of QOS-AR’ would be better than TAR. However, as the location quality increases, the performance of QOS-AR and QOS-AR’ would merge. In this context, ongoing improvements in non-scaling routing protocols for VANETs will be of continuing importance.
II.QOS BASED AD-HOC ROUTING
Our new hybrid position-based protocol, QOS-AR, combines a modified AODV protocol with a greedy-forwarding geographic routing protocol. In QOS-AR, we use AODV augmented with the predictable broadcast reckon(PBR) metric to find the best quality route (instead of the minimum hop count). We refer to this modified form of AODV as AODV- PBR. Usually, in AODV- PBR, intermediate vehicles report the broken routes to their source vehicles. However, in this paper, we add to AODV- PBR the additional functionality where intermediate vehicles are allowed to locally repair broken routes (a local repair will, in general, also cost less power consumption relative to reestablishing a new source-to-destination route).
Note that, to allow vehicles to calculate the quality (PBR) of their shared links, vehicles need to locally broadcast (received only by neighbor vehicles) small beacon packets periodically. These periodic beacon packets include the vehicle’s ID and the current location coordinates. These beacon packets also allow vehicles to build their neighbor tables,1 which includes both the neighbor vehicle ID and its current position coordinates. We summarize how our QOS-AR protocol operates.
QOS-AR initiates the route discovery in an on-demand fashion. If the source vehicle has no route to the destination vehicle, the source includes the location coordinates of both itself and the destination vehicle in a route request (RREQ) packet and then looks up its own neighbor table to find if it has any closer neighbor vehicle toward the destination vehicle. If a closer neighbor vehicle is available, the RREQ packet is forwarded to that vehicle. If no closer neighbor vehicle is available (i.e., void region or neighbor vehicles have no location information), the RREQ packet is flooded to all neighbor vehicles. In either case, the procedure is repeated until the RREQ packet reaches the destination vehicle. In QOS-AR, the RREQ packets include a time-to-live (TTL) field, which will be set by the source vehicle according to the estimated hop count between the source vehicle and the destination vehicle. The TTL field is decremented each time a current vehicle cannot (or does not) use location information in the forwarding decision, and the RREQ packet will be dropped once its TTL field becomes zero. This allows the protocol to avoid unnecessary flooding of the whole network.
© 2014, IJCSMC All Rights Reserved 115
One of the following instances then takes place: 1) If a closer neighbor vehicle is available, the neighbor vehicle replies with a route repair reply (RRRP) packet to the intermediate node, data packets are forwarded to the next vehicle, and the intermediate vehicle updates its own neighbor table, or 2) if a closer neighbor vehicle is not available, the neighbor vehicle floods the RRRP packet to all its neighbor vehicles after decrementing the RRP packet TTL field and ensures that 1) or 2) are repeated until the destination is reached. Note that, if the intermediate vehicle receives more than one RRP packet, it uses the route that was indicated by the first received RRRP packet (or if the AODV -PBR phase of TAR is used, until a better quality route is indicated by other received RRRP packets). If an intermediate vehicle fails to locally repair a broken link, it sends a route error (RERR) packet to the source vehicle.
There are some options for QOS
i. The total number of routing packets receives at per node. ii. The total number of routing bytes receives, at per node.
iii. The number of routing packets, count with sequence number, this means end-to-end, not calculated by per node basis.
III.ANALYSIS
We first technically define what we mean by scalability, and we analyze the scalability of both QOS-AR and stand-alone AODV- PBR (henceforth, unless stated otherwise, by AODV-PBR we will mean stand-alone AODV- PBR) protocols in the VANET environment.4 We adopt the definition in [23] for scalability, which states the following: Scalability is the ability of the routing protocol to maintain its routing overhead rate less than the network’s minimum collision load (MCL), as some parameter that describes the network increases. MCL is the minimum amount of bandwidth required to forward packets over the shortest distance (in number of hops) routes available, assuming that all the vehicles have instantaneous a priori full topology information.
This MCL will be dependent on parameters α1, α2, which could represent the data generation rate, mobility, network size, network density, or any other network parameter. We can define the network scalability factor in terms of the MCL.
Of course, it is well known that, as the size of a network increases, the throughput (for some finite delay bound) approaches zero, and therefore, no protocol can be scalable in any absolute sense. a protocol is scalable if the overhead of a protocol does not increase faster than the network’s MCL. In what follows, it is important that we focus on how the various overhead rates evolve with the underlying network parameter and contrast such evolution to how the MCLevolves with respect to the same underlying network parameter. The routing overhead rate ON that was induced by a routing protocol can be divided into the following three subclasses:
1) The initiation overhead rate Oi, which is required to initiate the routes;
2) The maintenance overhead rate Om, which is required to maintain these routes; and
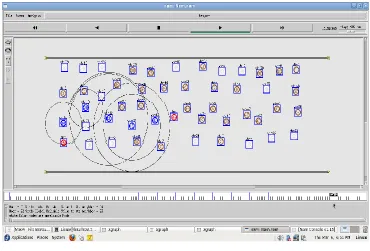
© 2014, IJCSMC All Rights Reserved 116 Fig1: Broadcasting of nodes
3.1. Om Analysis
To calculate Om for AODV PBR, we need to find the total number of route maintenance overhead packet transmissions Nm. We assume that vehicle mobility is the only reason for link failure. To calculate Nm, we need to estimate the average link failure rate α (number of times that a link fails per unit time) of a single link between any two active vehicles due to their mobility. We are interested in calculating the average link failure rate α of the wireless links between vehicles that are located along the active routes in the network. Here, we use the term active routes to mean routes that are used to route the data traffic between the source and the destination pairs. Broken links willtrigger the routing protocol to attempt repairs or to find another route that connects the required pairs. As such, Om of the routing protocol is directly proportional to the link failure rate.
© 2014, IJCSMC All Rights Reserved 117 Fig 2: Transmission of message
Obis the beacon overhead that allows vehicles to build up their neighbor tables and to estimate the quality of their links. Ob will be the same for both the AODV-PBR and QOS-AR Protocols.
© 2014, IJCSMC All Rights Reserved 118
IV.METRICS AND OTHER PROTOCOLS
4.1. Optimality of QOS-AR in the Presence of LocationError
For the network to provide location services, vehicles have to continuously update location servers with their current locationinformation. In this context, we could use QOS-AR to routethe location registration packets toward the location servers in the network and study the optimality of this process. More specifically, we could confirm the optimality of the QOS-AR by comparing the location registration overhead RLof thenetwork from both analysis and simulation will force the vehicle’s location registration packets to travel through longer routes toward the location servers. This increase in the length of routes can be modeled in QOS-AR by (30). For example, in the constant-area case, this leads to the minimum routing overhead in the presence of inaccurate location information. It is shown that QOS-AR remains effectively optimal (within 5% of the theoretically minimal overhead), even for location errors on the order of the transmission range. Note that these conclusions are based on an assumption of the most general motion model. Additional gains may be forthcoming if specific motion models were valid, combined with the use of forwarding decisions that are a function of the relative speed of the sender and next-hop vehicle.
4.2 QOS-AR and Other Performance Metrics
The main focus of this paper has been the scalability performance of QOS-AR relative to AODV- PBR. However, of course, other performance metrics are important in real-world deployments. we show the performance of QOS-AR relative to AODV- PBR using the performance metrics of the packet delivery ratio and the end-to-end delay for the highway scenario (constant area) with 20 random source–destination pairs and zero location error. The increase in the packet delivery ratio of QOS-AR as a function of density is due to the fact that the increasing density allows QOS-AR to easily establish and repair the required routes. On the other hand, for AODV- PBR, the increasing density will mean a growing routing overhead.
The reason for the poor behavior of the AODV- PBR protocol (although the PBR quality metric is used) is that the high routing overhead rate that was required to maintain the routes that were created by the AODV-PBR protocol forces. All the available links in the network to suffer significant degradation (packet losses). Although AODV-PBR chooses the best available links, such losses adversely impact the packet delivery. In the presence of location errors, QOS-AR will more frequently use its AODV-PBR component; therefore, we expect that the performance improvements of QOS-AR will diminish as the location error becomes larger. Note that the effect of both mobility models and propagation models directly maps to the link failure rate, which is an issue that affects the performance of AODV-PBR more relative to that of QOS-AR.
For the end-to-end delay metric, a similar discussion applies. As anticipated, TAR, in general, delivers superior service characteristics to the data flow. Although not discussed here, it is straightforward to modify QOS-AR to account for other effects that could cause service degradation, such as interference issues, and effects that are caused by longer distances between hops in QOS-AR (relative to AODV-PBR).
4.3 Other Routing Protocols
© 2014, IJCSMC All Rights Reserved 119 Fig.4.Graph for packet
More importantly, the effects of location errors can easily be implemented within the NMP, thereby allowing us to directly compare the performance of QOS-AR (in the presence of location error) with a more generic routing protocol. The reason behind the higher overhead rate of the NMP compared to the QOS-AR protocol is due to the fact that the routes established by the NMP will be longer (more hops) than the QOS-AR protocol as a result of the different next-hop selection criteria. In closing this section, we note the possibility of data aggregation and how this may assist all protocols in terms of scalability, albeit at additional complexity.
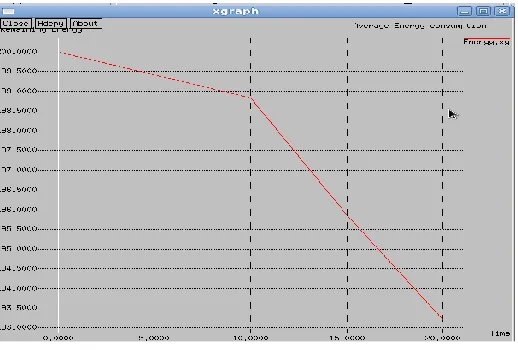
Fig 4: Graph for energy consumption
V.CONCLUSION
© 2014, IJCSMC All Rights Reserved 120
REFERENCES
[1] V. Naumov, R. Baumann, and T. Gross, “An evaluation of intervehicle ad hoc networks based on realistic vehicular traces,” in Proc. ACMMOBIHOC, 2006, pp. 108–119
[2] M. Torrent-Moreno, F. Schmidt-Eisenlohr, H. Fuler, and H. Hartenstein,“Packet forwarding in VANETs: The complete set of results,” Dept. Comput.Sci., Univ. Karlsruhe, Karlsruhe, Germany, Tech. Rep. 2006-2, 2006.
[3] W. Wang, F. Xie, and M. Chatterjee, “An integrated study on mobility models and scalable routing protocols in VANETs,” in Proc.Mobile Netw.Veh. Environ., 2007, pp. 97–102.
[4] F. K. Karnadi, Z. H. Mo, and K. Lan, “Rapid generation of realistic mobility models for VANET,” in Proc.
IEEE WCNC, 2007,pp. 2506–2511.
[5] D. Choffnes and F. Bustamante, “An integrated mobility and traffic model for vehicular wireless networks,”
in Proc. ACM VANET, 2005, pp. 69–78.
[6] K. C. Lan and C. M. Chou, “Realistic mobility models for vehicular ad hoc network (VANET) simulations,” in Proc. ITS Telecommun., 2008, pp. 362–366.
[7] K. Lee, U. Lee, and M. Gerla, “Survey of routing protocols in vehicular ad hoc networks,” in Advances in
Vehicular Ad-Hoc Networks: Developmentsand Challenges. Hershey, PA: IGI Global, 2009
[8] Y. Lin, Y. Chen, and S. Lee, “Routing protocols in vehicular ad hoc networks: A survey and future perspectives,” J. Inf. Sci. Eng., vol. 26, no. 3, pp. 913–932, 2010.
[9] F. Li and Y. Wang, “Routing in vehicular ad hoc networks: A survey,”IEEE Veh. Technol. Mag., vol. 2, no. 2, pp. 12–22, Jun. 2007.
[10] J. Chennikara-Varghese,W. Chen, O. Altintas, and S. Cai, “Survey of routing protocols for intervehicle communications,” in Proc. Mobile Ubiquitous Syst. Workshops, 2006, pp. 1–5.
[11] C. Perkins and E. Royer, “Ad hoc on-demand distance vector routing,” in Proc. IEEE WMCSA, 1999, pp. 90–100.
[12] S. Jaap, M. Bechler, and L. Wolf, “Evaluation of routing protocols for vehicular ad hoc networks in city traffic scenarios,” in Proc. 5th Int. Conf.ITS Telecommun., Brest, France, 2005.
[13] C. Lochert, H. Hartenstein, J. Tian, H. Fussler, D. Hermann, and M. Mauve, “A routing strategy for vehicular ad hoc networks in city environments,” in Proc. Intell. Veh. Symp., 2003.
[14] V. Naumov, R. Baumann, and T. Gross, “An evaluation of intervehicle ad hoc networks based on realistic vehicular traces,” in Proc. ACM MobiHoc, 2006, pp. 108–119.
[15] H. Saleet, O. Basir, R. Langar, and R. Boutaba, “Region-based locationservice- management protocol for VANETs,” IEEE Trans. Veh. Technol.,vol. 59, no. 2, pp. 917–931, Feb. 2010.