ABSTRACT
SHI, JIBIN. Predictive Microstructural Modeling of Grain-Boundary Interactions and Their Effects on Overall Crystalline Behavior. (Under the direction of Professor Mohammed A. Zikry.)
Predictive Microstructural Modeling of Grain-boundary Interactions and Their
Effects on Overall Crystalline Behavior
by
Jibin Shi
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Mechanical Engineering
Raleigh, North Carolina 2009
APPROVED BY:
_________________________ _________________________ Dr. Ron Scattergood Dr. Kara Peters
__________________________ _________________________
DEDICATION
BIOGRAPHY
ACKNOWLEDGEMENTS
I would like to express my deepest appreciation to my advisor, Dr. Mohammed Zikry for his support and guidance throughout my Ph.D. program. Without his patience, encouragement and advisory, the dissertation would be impossible. His insightful suggestion and inspiration not only helped me in my current research, but will also enlighten my future career path.
I would also like to offer my special thanks to my committee members, Dr. Ron Scattergood, Dr. Larry Silverberg, and Dr. Kara Peters for their willingness to be my committee members and their time to provide beneficial suggestions and comments.
Support from the Office of Naval Research through Grant N000140510097, is gratefully acknowledged. The computations were performed in the High Performance Computation (HPC) Center of North Carolina State University. The support and assistance from Dr. Gary Howell in HPC center are highly appreciated.
I would also like to express my sincere thanks to the fellows in the solid mechanics lab: Dr. Omid Rezvanian, Tarek Hatem, James Pearson, Khalil Khodary, William Lee, Pratheek Shanthraj and Siqi Xu. It has been a wonderful experience to communicate with you and learn from each other. Your friendship made my Ph.D. study exciting and memorable.
TABLE OF CONTENTS
LIST OF TABLES ... viii
LIST OF FIGURES...ix
CHAPTER 1. INTRODUCTION...1
1.1. GB Effects and GB misorientations ...1
1.2. Representation of GB Geometry and Coordinate Transformation...4
1.3. Intergranular and Transgranular Cracks ...7
1.4. Grain Size Effect and Hall-Petch Relation...9
1.5. Grain Boundary Sliding (GBS) ...11
1.6. Experimental and Computational Methods...12
CHAPTER 2. FORMULATIONS ...16
2.1. Dislocation-density Based Multiple-slip Crystal Plasticity Constitutive Formulation ...16
2.1.1. Multiple-slip Crystal Plasticity Constitutive Formulation ...16
2.1.2. Evolutionary Equations for the Mobile and Immobile Dislocation-densities .20 2.1.3. Determination of the Coefficients for the Coupled Evolution Equations ...24
2.2. Dislocation-density Grain Boundary Interaction (DDGBI) Scheme...25
2.3. Computational Methods ...31
CHAPTER 3. MODELING OF GRAIN BOUNDARY TRANSMISSION, EMISSION, ABSORPTION AND OVERALL CRYSTALLINE BEHAVIOR IN 1, 3, AND 17b BICRYSTALS...40
3.1. Introduction ...41
3.2. Results and Discussions ...45
3.2.1. Dislocation-density Transmission...46
3.2.2. Dislocation-density Absorption and Emission ...48
3.2.3. Varying CSL GBs ...49
3.3. Conclusion...53
CHAPTER 4. GRAIN-BOUNDARY INTERACTIONS AND ORIENTATION EFFECTS ON CRACK BEHAVIOR IN POLYCRYSTALLINE AGGREGATES ...68
4.1. Introduction ...69
4.2. Results and Discussions ...73
4.2.1. The Effects of Random Low Angle and High Angle GBs in a Crack-free Aggregate ...74
4.3. Conclusion...82
CHAPTER 5. GRAIN SIZE, GRAIN BOUNDARY SLIDING, AND GRAIN BOUNDARY INTERACTION EFFECTS ON NANOCRYSTALLINE AGGREGATE BEHVIOR...98
5.1. Introduction ...99
5.2. Results and Discussions ... 104
5.2.1. Initial Dislocation-densities for Different Grain Sizes...107
5.2.2. Material Behavior during Deformation... 107
5.2.3. GBS ... 108
5.2.4. Yield Stress of Polycrystalline Aggregates ... 109
5.2.5. Comparison With the Hall-Petch Relation ... 110
5.2.6. The Influence of GBS on Nanocracks ... 112
5.3. Conclusion... 112
CHAPTER 6. RECOMMENDATIONS FOR FUTURE RESEARCH ... 127
LIST OF TABLES
Table. 1.1. Slip-systems of f.c.c. Metals...15
Table. 2.1. Parameters for Raj and Ashby GBS Rate ...39
Table. 3.1. CSL GB Misorientations...67
Table. 3.2. Material Properties of Copper ...67
Table. 4.1. Misorientation of Random Low Angle GBs ...97
LIST OF FIGURES
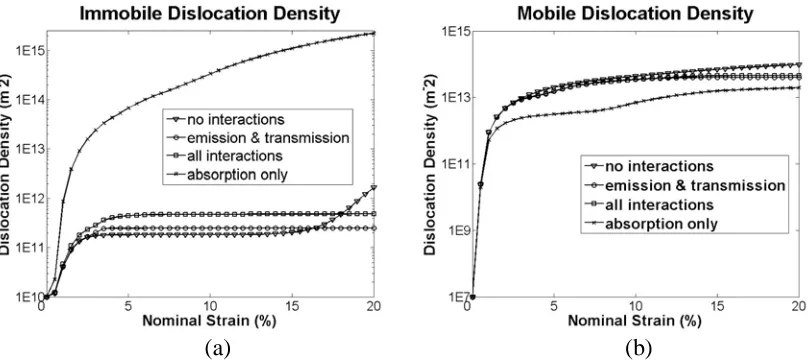
Fig. 3.7. Different GB interactions and dislocation-density behavior at 20% nominal strain: (a) semi-logarithmic plot of immobile dislocation-density development in one of the most active GB elements in the 17b bicrystal; (b) semi-logarithmic plot of mobile dislocation-density evolution in the neighboring element in 17b model. ...61 Fig. 3.8. Different GB interactions in most active element between GB and dislocation-densities of 17b model at 20% nominal strain: (a) the evolution of shear slip in an active GB element. (b) pressure in the same active GB element...62 Fig. 3.9. The nominal stress comparison for different schemes for the 17b bicrystal at 20% nominal strain. ...63 Fig. 3.10. The material behavior of the 1 bicrystal at 20% nominal strain: (a) the immobile dislocation-densities of the most active slip system 0 11
( )
111 without using the DDGBI scheme; (b) the immobile dislocation-densities of the most active slip system 0 11( )
111 using the DDGBI scheme; (c) the resolved shear stress of the most active slip system0 11
( )
111 without the DDGBI scheme; (d) resolved shear stress of the most active slip system 0 11( )
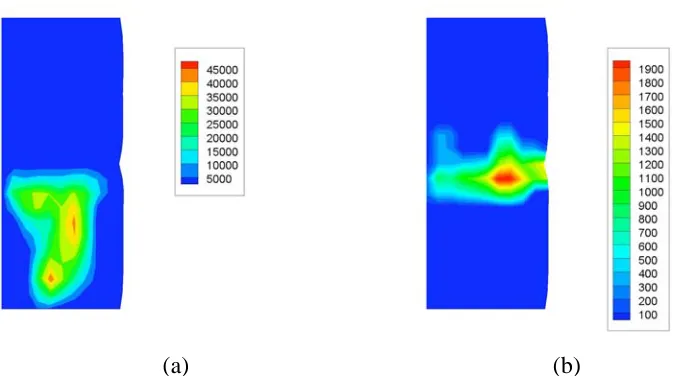
111 with the DDGBI scheme; (e) Von Mises stress without using the DDGBI scheme; (f) Von Mises stress with the DDGBI scheme...64 Fig. 3.11. The behavior of the 3 bicrystal at 20% nominal strain: (a) the immobile dislocation-densities of the most active slip system 0 11( )
111 without the DDGBI scheme; (b) the immobile dislocation-densities of the most active slip system 0 11( )
111 using DDGBI scheme; (c) the resolved shear stress of the most active slip system 0 11( )
111 without the DDGBI scheme; (d) resolved shear stress of the most active slip system0 11
( )
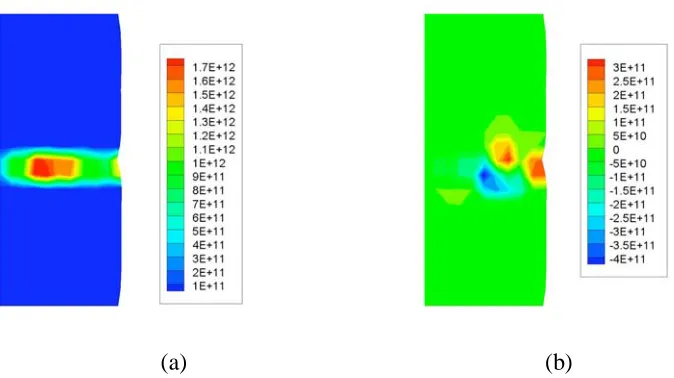
111 with the DDGBI scheme; (e) Von Mises stress without the DDGBI scheme; (f) Von Mises stress with the DDGBI scheme. ...65 Fig. 3.12. The behavior of the 17b bicrystal at 20% nominal strain: (a) the immobile dislocation-densities of the most active slip system 011( )
1 11 without the DDGBI scheme; (b) the immobile dislocation-densities of the most active slip system 011( )
1 11 using DDGBI scheme; (c) the resolved shear stress of the most active slip system 011( )
1 11 without the DDGBI scheme; (d) resolved shear stress of the most active slip system011
CHAPTER 1
INTRODUCTION
1.1.
GB Effects and GB Misorientations
(Hall 1951; Petch 1953). In contrast, for nano crystalline materials, grain boundary sliding (GBS) dominates the plastic deformation and significantly decreases the yield stress (Raj and Ashby 1971; Meyers, Mishra et al. 2006). In order to successfully model the mechanical properties of crystalline materials, it is crucial to have thorough understanding on GB behavior and interactions at different scales.
Desired material properties of most crystalline materials can be potentially obtained
by controlling the micro-structural aspects of GB behavior. The mechanical, physical and
chemical properties of the GBs can be optimized as a function of the spatial orientation and
the crystallography of each grain. The most common method that correlates the structures
and properties of GBs is the coincident site lattice (CSL) method (Randle 1993). In the CSL
formalism, certain orientations in space of two neighboring crystal lattices will result in a
periodic arrangement of the interfacing lattices. The CSL method provides a broad class of
GBs with different misorientations that can be used to investigate GB behavior. So for
example, 1 is a low angle CSL GB, and various experiments have indicated that dislocation
transmission can easily occur, and that there are no dislocation pile-ups in the GB region for
this CSL GB (Lee, Robertson et al. 1989; Lin and Pope 1993; Zhang, Wang et al. 2003;
Ohmura T 2004). 3 GBs are another type of CSL with slightly higher energy than 1 CSLs.
Experiments and simulations have shown that one of interactions between dislocations and
GBs for face centered cubic (f.c.c.) systems with 3 GBs is GB dislocation absorption
(Tanaka, Tsurekawa et al. 1994; Poulat, Decamps et al. 1998; Lucadamo and Medlin 2002;
absorption could be due to lattice dislocations dissociating into Shockley partial dislocations
in the GB region. Dislocation transmission (Lee, Robertson et al. 1990; Poulat, Decamps et
al. 1998) has also been widely observed for 3 GBs. For higher angle CSLs, such as, 5, 7,
17, and 19, in which there are no coplanar slip systems, dislocations can pile-up in the
GB, resulting in intergranular cracks (Lin and Pope 1995; Zikry and Kao 1996; Su, Demura
et al. 2002; Kameda, Zikry et al. 2006). The CSL method can correlates GB geometry and its
properties, but this pure geometrical GB description does not provide enough information to
predict and estimate special GB properties, other information such as GB structure, chemical
and electrical bonding (Sutton and Balluffi 1987) and local interactions between dislocations
and GBs is also important in determine the GB properties. Moreover, the CSL method is not
able to account for properties of random GBs if they do not fall into any CSL category
(Sutton and Balluffi 1987; Priester 1989). For random low angle GBs, in which
misorientations are generally less than 15°, GB dislocation (GBD) networks are usually well
organized with periodic patterns, and the GB energy is basically linearly proportional to the
misorientation angle (Read and Shockley 1950). Slip systems on each side of the GB are
nearly coplanar, which provide an easy path for dislocation transmission between grains. For
random high angle GBs, where misorientations are generally greater than 15°, the GBD
networks are usually thick and irregular, and the GB energy is usually much higher than
random low angle GBs, and the GB behavior is unpredictable due to the complexity of GBD
networks (Read and Shockley 1950; Watanabe, Yoshida et al. 1999; Amouyal, Rabikin et al.
1.2.
Representation of GB Geometry and Coordinate Transformation
To define a geometrical description of a GB, the first step is to define its degrees of
freedom. As noted by Randle (Randle 1993), A GB in a bicrystal has eight degrees of freedom
in total: five of these are known as macroscopic and the other three microscopic (Goux 1974).
The macroscopic degrees of freedom of a GB characterize the geometry which relates the
overall orientation change occurring across the GB plane in a bicrystal. This definition
emphasizes the crystallographic nature of GB geometry and refers to the orientation
relationship (misorientation) across the surface of the GB. Of the five macroscopic degrees of
freedom, four define two directions (two each) and one defines an angle. The identity of the two
directions and angle depends upon whether the interface-plane scheme or the misorientation
scheme is used to describe the GB geometry. The surface of the GB is referred to as the GB
plane even though in reality it may not always be planar. The orientation of each grain is defined
by the orientation of its crystal coordinate system 100, 010, 001 with respect to a fixed reference
system.
In the interface-plane scheme, the five degree of freedom are two from the GB plane
normal (N1, N2) in each of the two grains and one () from the twist angle. It is pertinent
because it focuses on the concept of a GB as a joining together of two surfaces, followed in
general by a twist rotation, to forma bicrystal.
The second interpretation of the GB degrees of freedom starts from the relative rotation
between the orientations of the two neighboring lattices and is called angle/axis notation. The
angle/axis notation is more general and more commonly used. Different from the
interface-plane scheme, the angle/axis notation only define three degrees of freedom as it only represents
the relationship between the two neighboring lattices and not the position of the GB itself.
rotation axis (UVW) and one degree of freedom on rotation angle (). The macroscopic
definition of a GB is complete if one of the two GB normals (N1 or N2) is defined, since each
GB normal takes two degrees of freedom.
The angle/axis notation is one way in which the misorientation geometry of a GB may be
described mathematically; there is another equivalent description which use Euler angles (Bunge
1987). The orientation of each crystal is given by three Euler angles, 1, , 2, and the
orientation of the GB is given by a normal vector to the GB normal (N1 or N2). Therefore, these
five degrees of freedom will be sufficiently representative for planar deformation.
In the Bunge system (Randle 1993), the global crystallographic axes
(
[
100]
,[
010]
,[
001]
)
are designated as (x2, y2, z2), and the local rotated axes are designated (x1,y1, z1). Three successive rotations, based on specified Euler angles, are needed to represent the
crystallographic orientation of each grain. The three rotations are as follows:
Rotation m1: rotate about z1 by 1, so that the rotated x1 '
lies in the plane (x1,x2).
The rotated system now is (x1 '
, y2 '
, z2 '
).
Rotation m2: rotate about x1 '
by so that the rotated z1 "
is parallel to z2. The rotated
system now is (x1 "
, y1 "
, z1 "
).
Rotation m3: rotate about z1 "
=z2 by 2, so that the rotated x1 '''
and y1 '''
coincide with x2 and
y2, respectively.
The mathematical representations of Euler rotations are:
1 1
1 1 1
cos sin 0
sin cos 0
0 0 1
2
1 0 0
0 cos sin
0 sin cos
m =
, (1.1b)
2 2
3 2 2
cos sin 0
sin cos 0
0 0 1
m =
. (1.1c)
For two adjacent grains, misorienting one with respect to the other is performed by rotating each
crystal coordinate system by a transformation matrix, based on each crystal’s Euler angles, with
respect to a global polycrystal frame-of-reference. The misorientation transformation matrix for
Euler angles (1, , 2), is calculated by matrix multiplication of the rotation matrices
(
m m m 1, 2, 3)
3 2 1
M =m m m . (1.2)
Using Eqns. (1.1) together with Eqn. (1.2) will yield
1 2 1 2 1 2 1 2 2
1 2 1 2 1 2 1 2 2
1 1
cos cos sin sin cos sin cos cos sin cos sin sin
cos sin sin cos cos sin sin cos cos cos cos sin
sin sin cos sin cos
M + = + , (1.3)
which is the misorientation-transformation matrix expressed in terms of Euler angles.
Dislocation glide occurs in definite crystallographic planes and directions. The
combination of a particular slip plane and a slip direction in that plane is a slip-system. Face
centered cubic (f.c.c.) crystals deform on the close-packed octahedral
{
111}
planes in the<110> close-packed directions. There are four planes with three different slip directions,
therefore there are total of twelve slip-systems for each crystal. Hence, the two vectors
slip vector s.
The following transformation law for first-order Cartesian tensors defines the rotational
slip system in each crystal
'
ij ij
n =Mn , (1.4a)
'
ij ij
s =Ms . (1.4b)
The slip normal to and the slip direction vectors are given in the Table 1.1.
1.3.
Intergranular and Transgranular Cracks
The intrinsic characteristics of GB structure, misorientations and interactions with
dislocations are essential microstructural factors in characterizing intergranular and
transgranular cracks. The transmission, absorption, emission or pile-up of dislocations will
have different effects on failure evolution and crack growth at the GB region. It has been
well-known by the pioneering work (Hanada, Ogura et al. 1986; Lin and Pope 1995) that low
angle GB and symmetrical 3 twin boundaries are particularly resistant to intergranular
crack. In contrast, most other CSL boundaries and high angle GBs were found to be prone to
intergranular crack (Zhang, Wang et al. 2003; Zhong, Xiao et al. 2006).
For low angle and 3 GBs, there are usually several coplanar or nearly coplanar slip
systems between two neighboring grains and dislocations can transmit between neighboring
grains without difficulty. The transmission of dislocations through these GBs attenuate the
stress in the GB region and prevent the formation of dislocation pile-up, hence intergranular
that when a random low angle GBs are ahead of a growing crack, the dislocations emitted
from the crack can easily transmit through the GB region into neighboring grain, and the
crack can penetrate the GB region without significant changes in the original crack
orientation (Zhang, Wang et al. 2003; Zhong, Xiao et al. 2006; Zhang and Wang 2008).
Computational simulations have also predicted the fracture toughness of low angle GB
(Gertsman and Tangri 1997; Kim, Hong et al. 2003) and successfully predict transgranular
crack based on the dislocation activities near the low angle GB region (Kameda and Zikry
1998).
In contrast, random high angle GBs are highly disordered usually with high
misorientation and interfacial energies (Shih and Li 1975; Watanabe, Yoshida et al. 1999;
Amouyal, Rabikin et al. 2005). There are no coplanar slip systems between most high angle
GBs and CSL GBs other than 3 and 1. The high misorientation, high GB energy and
complex GBD networks in high angle GBs usually result in dislocation absorption and
pile-ups in the GB region. These random high angle GBs act as strong barriers of dislocation
movement, and consequently change the original crack directions, and even render
transgranular cracks into intergranular cracks. There have been a lot of TEM experiments and
observations showing how high angle GB affects crack behavior. Robertson et al. observed
that a transgranular crack become intergranular after micro-crack initiates at the pile-up
region in high angle GB (Robertson, Lee et al. 1992); Zhong, et al. found that a transgranular
crack significantly changed its direction at a high angle GB (Zhong, Xiao et al. 2006); Zhang
severe dislocation pile-ups (Zhang, Wang et al. 2003; Zhang and Wang 2008).
Computational simulations are also coincident with about observations. Using MD method,
Farkas et al. have confirmed that transgranular crack can turn into intergranular cracks at
high angle GB (Farkas, Van Swygenhoven et al. 2002). Kemeda et al. successfully predict
intergranular cracks using dislocation-density based crystal plasticity and FE method
(Kameda and Zikry 1998).
1.4.
Grain Size Effect and Hall-Petch Relation
It is well known that the mechanical properties, especially the yield strength, of crystalline materials are closely related to the grain size. Usually the smaller grain size corresponds to higher yield stress in crystalline materials. This fact is called Hall-Petch relationship (Hall 1951; Petch 1953) and it is
y =o+kd 1/2
. (1.5)
size and finally it reaches a lowest limit corresponding to the yield stress of amorphous materials (Nieh and Wadsworth 1991; Schuh, Nieh et al. 2002). However, there have been doubts on the inverse Hall-Petch relation and further investigations are needed to confirm it.
GBs play a critical role in the yield stress of materials in that there can be several
different deformation modes associated with different grain sizes, grain shape, temperature,
stress state and GB structures (Meyers, Mishra et al. 2006). There are four major deformation
modes for crystalline materials: 1. grain boundary sliding (GBS) caused by the atomic
shuffling of the GB interface; 2. collective GB migration; 3. stacking faults; 4. dislocations
from the interface to the grains (Sansoz and Molinari 2005). The first two modes correspond
to GB-mediated deformation and the last two modes correspond to dislocation-mediated
deformation. These deformation modes work together to finally determine the overall plastic
behavior and yield stress of crystalline materials.
For coarse grain materials, where Hall-Petch relation holds, the plastic deformation is
mainly attributed to dislocation-mediated deformation such as full and partial dislocations
evolution and annihilations, in which GBs act as barriers of dislocations movement, sinks
and sources of dislocations. GBS and GB migration are usually negligible and only occur
under certain conditions such as high temperature, high stress with long loading durations.
For crystalline materials with grain sizes of several nanometers, where inverse Hall-Petch
relation holds, plastic deformation is mainly attributed to the GB-mediated deformation, such
as GBS and GB migration. The GB-mediated deformation is considered as thermally
activated process that will reduce the yield stress of the nano-crystalline material according
migration. For example, Von Swygenhoven et al. found no contribution of grain interior in
total deformation of the MD model with average grain size of 5 nm (Van Swygenhoven and
Caro 1998).
1.5.
Grain Boundary Sliding (GBS)
There are two different types of GBS. The first one is called Rachinger sliding (Rachinger 1952), which refers to the relative displacement of adjacent grains where the grains retain their original shape but displaced with respect to each other. Because oftentimes the polycrystals have irregular shape, the Rachinger sliding usually have to be accommodated by some intragranular movement of dislocations within the adjacent grains. The other type of sliding is called Lifshitz Sliding (Lifshitz 1963), which refers to the boundary offsets that develop as a direct consequence of the stress-directed diffusion of vacancies. The above types of sliding are results of thermal activation process, such as diffusion and atom shuffling, but some of MD simulations (Van Swygenhoven and Caro 1998; Sansoz and Molinari 2005) indicate that GB sliding may also happen at 0K, which indicates that the GBS also contains an athermal component.
both GB and bulk diffusion into consideration, Fu et al. (Fu, Benson et al. 2004)obtained expressions on GBS rate on different grain shapes.
1.6.
Experimental and Computational Methods
There are many methods to study the mechanical properties of materials, experimental test, molecular dynamics simulation and finite element methods are the most frequently used methods. Conventional microscopy, scanning electron microscopy (SEM) , X-Ray topography and transmission electron microscopy (TEM) are widely used to observe underlying micro-scale interactions and mechanisms, among which, TEM is by far the most important technique for studying defects in great detail. TEM is a microscopy technique whereby a beam of electrons is transmitted through an ultra thin specimen, interacting with the specimen as they pass through. An image is formed from the interaction of the electrons transmitted through the specimen, which is magnified and focused onto an imaging device. There have been a lot of TEM observations on detailed physical mechanisms of dislocations, especially interactions between dislocations and GBs (Robertson, Lee et al. 1989; Lee, Robertson et al. 1992; Hu, Molodov et al. 2000). In order to observe dynamic behavior of nano-crystalline materials, In-situ TEM technique has been widely used (Lagow BW 2001; Gemperlova J 2002; Ohmura, Minor et al. 2005).
method provides insights that may be not possible with TEM in-situ observations on the nano scale. The MD methods have shown that GBs can act as sinks and sources of dislocations (Schiotz 2004; Van Swygenhoven, Derlet et al. 2006). Dislocations can be absorbed in the GB causing pile-ups (Yamakov, Wolf et al. 2003; Schiotz 2004) and cross-slip (Yamakov, Wolf et al. 2003). But, severe limitations on time and length scales may render these simulations ineffective on the micro-structural physical scale that pertains to the inelastic behavior of crystalline aggregates.
Table. 1.1. Slip-systems of f.c.c. Metals Slip system # Slip system
1
( )
111 01 12
( )
111 101CHAPTER 2
FORMULATIONS
In this chapter, the formulations used in the modeling of different GB behavior are presented, which includes dislocation-density based multiple-slip crystal plasticity constitutive formulation, the GB dislocation-density interaction scheme, the misorientation dependence on initial GB dislocation-densities, and Raj-Ashby GBS formulation.
2.1.
Dislocation-density Based Multiple-slip Crystal Plasticity Constitutive
Formulation
The formulation for the multiple-slip crystal plasticity rate-dependent constitutive relations, and the derivation of the evolutionary equations for the mobile and immobile dislocation-densities, which are coupled to the multiple-slip crystalline formulation, are presented in this section. The detailed presentation of this constitutive formulation is given by Zikry and Kao (Zikry and Kao 1995).
2.1.1.
Multiple-slip Crystal Plasticity Constitutive FormulationIt is assumed that the deformation gradient can be decomposed into elastic and plastic components. The velocity gradient tensor, Vi,j is related to the deformation gradient by
1 ,
i j ik kj
where Fij is the total deformation gradient. The velocity gradient, Vi,j, can be decomposed
into symmetric and anti-symmetric parts as
Vij=Dij+Wij, (2.2)
where Dij is symmetric part, representing the deformation rate tensor, and
(
, ,)
1 2
ij i j j i
D = V +V . (2.3)
Wijis the anti-symmetric part, representing the spin tensor, and
(
, ,)
1 2
ij i j j i
W = V V , (2.4)
It is assumed that the spin tensor Wij and deformation rate tensor Dij can be further
decomposed into elastic and plastic components as
Dij =Dij p+
Dij
*
, (2.5)
Wij=Wijp+ Wij*
. (2.6)
The superscript * means that the elastic part and the superscripts p denotes the plastic
part. Wij *
represents the rigid body spin. The elastic components of the velocity gradient Dij
*
correspond to the elastic lattice distortion and the inelastic parts are defined in terms of the
crystallographic slip rates as
( ) ( )
p ij ij
D =P , (2.7)
( ) ( )
p ij ij
where is summed over all slip systems and the tensors Pij ()
and ij ()
are symmetric and
skew-symmetric second-order tensors, and are defined in terms of the unit normals and the
unit slip vectors as
Pij
() = 1
2 si
( )n
j
( )+s
j
( )n
i
( )
(
)
, (2.9)ij
() = 1 2 si
( )n
j
( )s
j
( )n
i
( )
(
)
. (2.10)where ni ()
is the unit vector normal to the slip plane, and si ()
is the unit vector in the slip
direction.
The elastic response can be expressed in terms of a hypoelastic law
*
*
ij L Dijkl kl
= , (2.12)
where Lijkl is the fourth-rank elasticity tensor with Voigt symmetry and
*
ij
is the Jaumann
rate of Cauchy stress, ij, co-rotational with the lattice spin.
The objective stress rate used here, is given by
*
* *
ij ij Wik kl Wjk kl
= , (2.13)
where ijis a material time-derivative of Cauchy stress.
The objective stress rate, ij
, co-rotational to the material element can be derived as
(
p)
p pij Lijkl Dkl Dkl Wik kj Wjk ki
= , (2.14)
(
)
ijkl ik jl jk il ij kl
L =μ + + , (2.15)
where ij is the Kronecker delta and and μ are the Lamè constants.
For a rate dependent formulation, the slip-rates are functions of the resolved shear
stress and the reference shear stress on each slip-systems in a power law form of
( ) ( ) ( )
( ) ( ) ( )
( )1/m 1
ref ref ref =
(no sum on ), (2.16)
where ref
( ) is the reference shear strain rate which corresponds to a reference shear
stress ref
(), and m is the rate sensitivity parameter and m is given by
( ) ( ) ln ln m =
. (2.17)
For most of the metals, m is close to 100 at room temperature when the shear slip rate is
smaller than a critical value and approximately equal to 1 when shear slip rate is greater than
the critical value. In this case, the flow is assumed to be characterized by drag-controlled
dislocation motion. The rate-independent limit is achieved as m approaches zero. For
multiple slip, is taken as the sum of the accumulated plastic strains on all slip systems n,
( ) 1 n =
=
, (2.18)where () is the resolved shear stress and is given in terms of the Cauchy stress by
( ) ( )
ij ij
P
= (2.19)
From the balance of energy, with no thermal conduction, the time rate of change of
' p ij ij p T D c = (2.20)
where is the fraction of the plastic work converted to heat, ij’
is the deviatoric stress, is
the material density, and cp is the specific heat of the material.
2.1.2.
Evolutionary Equations for the Mobile and Immobile Dislocation-densitiesTo gain a more fundamental understanding of dislocation motion, interaction, and
transmission on material failure modes, the crystal plasticity constitutive formulation is
coupled to internal variables that account for a local description of the dislocation structure in
each crystal. Specifically, the mobile and the immobile dislocation-densities have been used
as the internal variables in the present constitutive formulation. In inelastic deformations, the
characteristics of the microstructure are governed by the mechanisms of dislocation
production and dynamic recovery. As the material is strained, immobile dislocations are
stored in each crystal, and these dislocations act as obstacles for evolving mobile
dislocations. Therefore, the immobile and mobile dislocation-densities can be coupled, due to
the continuous immobilization of mobile dislocations.
The reference shear stress is a modification of widely accepted classical forms that
relate the reference shear stress to a square-root dependence on the immobilized
dislocation-density as ref ( )= y
( )+aGb
im
( )
=1 12
where b is the magnitude of burgers vector, G is the shear modulus, y ()
is the static yield
stress, and a is interaction coefficients, and generally have a magnitude of unity.
For a deformed material, it can be assumed that the dislocation structure of total
dislocation-density ()
can be additively decomposed into two components: immobile
dislocation-density im
()
and mobile dislocation-density m
()
as
( ) =m
( )+
im
( ). (2.22a)
Following the approach of Gottstein et al. (Gottstein and Argon 1987), we assume
that during an increment of strain, the dislocation-density generates (denoted by()+) and
annihilates (denoted by (
)-) on each slip system as
( ) ( ) ( ) im im im d dt = ++ (2.22b) ( ) ( ) ( ) m m m d dt = ++ (2.22c)
where im( )
+
and im( )
correspond to the generation and annihilation of immobile
dislocation-densities, and m( )
+
and m( )
correspond to the generation and annihilation of
mobile dislocation-densities.
The balance between dislocation generation and annihilation, Eqns. (2.22b-c), is the
basis for the evolution of mobile and immobile dislocation-densities as a function of strain.
Plastic deformation of the crystal is assumed to begin with the easy glide stage, stage I. In this
stage, most of the dislocations belong to the primary slip-system, and very little slip takes place
on secondary slip-systems. Also, dislocation-densities are comparatively low, and the details of
high-resolution methods. In the second stage of hardening (stage II), secondary slip systems are
activated, and dislocation clusters and cell walls begin to form. The third stage of hardening is
characterized by the annihilation and the rearrangement of dislocations. For a detailed
experimental overview of dislocation emission, interaction, trapping, and annihilation for the
three hardening stages in f.c.c. materials, see, for example, (Anongba, Bonneville et al. 1993;
Anongba, Bonneville et al. 1993; Argon and Haasen 1993).
In stage I, dipoles and multipoles are formed after mobile dislocations emitted from a
source are trapped by dislocations of opposite signs on parallel slip planes. The back stress at
the source is due to the dislocation emitted by the source. If the flow stress is greater than this
back stress, the source will continue to emit dislocations, and dislocations that are trapped can
break free. A large number of dipoles, multipoles, and loops are formed in easy glide by forest
interactions, cross-slip around obstacles, and interactions between dislocations on parallel slip
planes. Dipoles and multipoles occur in well-spaced clusters, thus allowing primary dislocations
to glide over long distances. Using the Eqn. (2.22c), this is given by
( ) m d dt =
rate of generation. (2.23)
The rate of dislocation generation is proportional to the distance traveled by the emitted
dislocations from a dislocation source with density souce( )
. This distance, yback, is related to the
decrease of the back stress on the dislocation-density source, souce( )
, after previously emitted
dislocations have traveled this distance yback. Hence, Eqn. (2.23) can be written as
( ) ( ) m source back d v dt y =
, (2.24)
where v is mobile dislocation average velocity. Using Orowan’s equation, ( ) m( )bv
and
( ) ( ) ( )
2
m sour im m d g d b =
, (2.25)
where b is the modulus of the Burgers vector, gsource is a coefficient pertaining to an increase in
the mobile dislocation-density due to dislocation sources.
In stage II, dipole clusters multiply and join together, so that primary glide dislocations are
efficiently blocked. Hardening increases in this stage are due to an increase in dislocation
tangles. The forest dislocations of these systems serve as obstacles for the primary dislocations.
The mobile dislocations are immobilized with a mean free path proportional to
( )
im( ) 1/ 2
.
Spatially organized forest structures and tangles such as Frank nets, cell walls, or
sub-boundaries can act as immobilization sites at this stage of the deformation. Also thermally
activated cross slip can block the glide dislocations. Since the rate of trapping is related to an
increase in rate of growth of immobile dislocations, using Eqn. (2.23), the coupled mobile and
immobile dislocation-density evolution equations for this stage are given by
( )
( ) min
2 exp ,
m immob ter im
d g g H
d b b kT
= (2.26)
( )
( ) min
2 exp ,
im immob ter im
d g g H
d b b kT
= + (2.27)
where b is the modulus of the Burgers vector, gimmob is a coefficient related to the immobilization
of mobile dislocations, and gminter is a coefficient related to the trapping of mobile dislocations
due to thermally activated cross-slip.
At moderate and large strains, dynamic recovery characterizes the stage III. At
temperatures lower than 40% of the melting temperature, the main mechanism of recovery is
annihilation of the screw segments of opposite signs on the expanding dislocation loops. The
( ) ( ) cov im re im d g d
= , (2.28)
where grecov is a coefficient related to the rearrangement and annihilation of immobile
dislocations.
Eqns. (2.25-2.28) can be combined to obtain a coupled set of nonlinear evolutionary equations
( )
( ) ( )
( ) min ( )
2 2 exp
m sour im ter immob im m
d g g H g
dt b b kT b
=
, (2.29)
( )
( ) min ( ) ( )
cov
2 exp exp
im ter immob
im re im
d g H g H
g
dt b kT b kT
= +
, (2.30)
where gsour is a coefficient pertaining to an increase in the mobile dislocation-density due to
dislocation sources; gminter is a coefficient related to the trapping of mobile dislocation due to
forest interactions; grecov is a coefficient related to the rearrangement and annihilation of
immobile dislocations; gimmob is a coefficient pertaining to the immobilization of mobile
dislocations; H is the activation enthalpy; and k is the Boltzmann’s constant. As these
evolutionary equations indicate, the dislocation activities related to recovery and trapping are
coupled to thermal activation. The thermal activation energy temperature is updated as a
function of the energy equation given by (2.20).
2.1.3.
Determination of the Coefficients for the Coupled Evolution EquationsTo couple the evolutionary equations to the crystal plasticity formulations, the four g
coefficients in (2.29-2.30), and the enthalpy, H, must be determined as functions of the
current temperature to the reference temperature, following Paidar, Pope et al. (Paidar, Pope et al.
1984), a form of activation enthalpy for cross-slip which accounts the cross-slip effects. The
four g coefficients are determined using two general conditions, pertaining to the evolution of
dislocation-densities in crystalline materials, have been used:
(i) that the mobile and immobile dislocation-densities saturate at large strains;
(ii)that the relaxation of the mobile dislocation-density to a quasi-steady state value
occurs much faster than the variation of the immobile dislocation-density.
The conditions are invoked based on the arguments by Mecking and Kocks (Mecking and Kocks 1981), Walgraef and Aifantis(Walgraef and Aifantis 1985; Walgraef and Aifantis 1985; Walgraef and Aifantis 1985; Walgraef and Aifantis 1985), and Estrin and Kubin (Estrin and Kubin 1988; Kubin and Estrin 1988). They used similar arguments to determine coefficients in equations pertaining to the evolution of mobile and immobile dislocation-densities. The saturation of both the immobile and mobile dislocation-densities at large strains and the their to different quasi-steady values in f.c.c. materials have been experimentally substantiated by several investigators (see, for example, Mughrabi,(Mughrabi 1987); Hansen, (Hansen 1990)). For a detailed presentation, see to (Zikry and Kao 1996; Zikry and Kao 1996; Kameda and Zikry 1998).
2.2.
Dislocation-density Grain Boundary Interaction (DDGBI) Scheme
In this section, a dislocation-density grain boundary interaction (DDGBI) scheme is
presented to account for the GB dislocation-density activities. It is assumed that the
Based on the single transmission criteria by Clark et al. (Clark, Wagoner et al. 1992), a
transmission criteria for multiple slip is proposed as follows:
Criteria 1. A transmission factor is proposed based on two components. The first one
is the angle (Fig. 2.1), which is the angle between the intersection lines of the slip planes
and GB planes; the second part is the angle between slip directions of these two slip
systems. Hence, the transmission factor M can be denoted as
M =cos cos, (2.31)
where =arccos(l l1 2) in which (l1=n n1 GB
and l2 =n n2 GB
), (2.32a)
and =arccos
(
s s1 2)
, (2.32b)Criteria 2. The ratio of resolved shear stress to the reference shear stress of the
outgoing slip system (stress ratio) should be greater than a critical value ccr, which is
approximately one.
If these transmission criteria are satisfied, a dislocation-density can emit from a
higher dislocation-density region to a lower dislocation-density region. It is assumed that the
dislocation-densities will be redistributed according to these transmission factors as shown in
Fig. 2.2. Based on this, a balance of densities due to these different
dislocation-density interactions, out ()
, can be defined as
out( ) = M out ( )/ ref ( )
(
)
Miout i ( ) / ref i ( )
(
)
i=1 m
inc
where is an incoming slip system, is an outgoing slip system, out() is the corresponding
resolved shear stress, and ref() is the reference shear stress of the outgoing slip system . m is
the number of all possible outgoing slip systems, and M is the transmission factor between
the incoming and outgoing slip systems.
When dislocation-densities emit from one element to the other, a balance for the
dislocation-densities can be obtained by considering dislocation-density conservation
(Aifantis 1987).
( )
( ) ( ) ˆ
c div j t =
, (2.34a)
where ( )
( ) ( ) ndA ndA t t div j x y = +
, (2.34b)
where j( ) represents the flux of dislocation-densities in slip system , A is area of
integration, n is the GB surface normal, () is the summation of the dislocation-densities
changes in the domain indicated by Eqn. 2.33, and cˆ( ) represents the generation,
immobilization or annihilation of dislocations densities. cˆ( ) is given by the statistical
distribution of the immobile and mobile dislocation-densities from Eqns. 2.35a-b.
( ) ( ) min ( ) ( )
cov 2
ˆ ter exp immob exp
im im re im
g H g H
c g
b kT b kT
= +
, (2.35a)
( ) ( ) ( )
( ) min ( )
2 2
ˆ sour im ter exp immob
m im
m
g g H g
c
b b kT b
=
. (2.35b)
( )
( )
( ) min ( ) ( )
cov
2 exp exp
im ter immob
im re im
d g H g H
g div j
dt b kT b kT
= +
, (2.36a)
( ) ( )
( ) ( )
( ) min ( )
2 2 exp
m sour im ter immob im m
d g g H g
div j
dt b b kT b
=
. (2.36b)
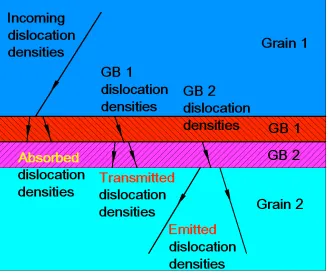
Dislocation-density activities can occur in the GB interface and at GB-interior interfaces (Fig. 2.1-2.2). In the proposed GB representation, we assume that dislocation-density transmission occurs when immobile dislocation-densities transmit through the GB interfaces
to compatible slip systems in the neighboring grain. Dislocation-density absorption occurs when mobile dislocation-densities from the grain interior transmit into the GB, but do not transmit out of it. In this case, all of the mobile dislocation-densities are then immobilized to immobile dislocation-densities, and are assumed to be absorbed in the GB. Some of these immobile dislocation-densities in the GB regions may pile-up, but as the deformation evolves can activate neighboring slip systems. This can result in dislocation-density emission, in which the immobile dislocation-densities in the GB become mobile dislocation-densities and emit into the neighboring grain. Hence, all three processes of transmission, absorption, and
emission can occur simultaneously on different slip-systems within the GB region and between neighboring grains.
2.3.
Initial dislocation-densities dependence on GB misorientations
misorientation and initial dislocation-densities (before deformation) in low angle GBs. That relation is
x =
acos, (2.37a)
y=
a
sin
, (2.37b)where x and y are the line density of initial dislocation at x and y directions; is the tilt misorientation of the GB, a is the lattice parameter; is the angle between lattice and GB, and 0<</2. Assuming that the grain has a rectangular shape, and the grain size is d, the initial dislocation density due to GB misorientation can be given as
im = 2
d
(
x +y)
=2
ad
(
cos+sin)
. (2.38)According to this equation, the initial dislocation-density is grain size and misorientation dependent. This can be critical, since for nanocrystalline materials, the initial dislocation-densities in the GB region are usually higher than the grain interior (Read and Shockley 1950; Gleiter 1977; Van Swygenhoven, Farkas et al. 2000).
2.4.
GBS mechanism
nodal velocity ut is a combination of dislocation-mediated deformation and GB-mediated deformation as
ut =udis +ugbs, (2.39)
where udisis the dislocation-mediated velocity and ugbsrepresents the GBS velocity. The GBS rate of nanocrystalline material is accounted for by the Raj and Ashby equation as
ugbs =
dugbs dt = 2 a kT
h2 DV 1+
DB
DV
, (2.40)
where a is the shear stress along the direction of the GB, is the atom volume, is the wavelength, and h is the amplitude of the GB. DV and DB are volume and boundary diffusion coefficients, is the GB width, k is Boltzmann constant, and T is temperature. At temperature significantly below melting point, DB>>DV, and hence the Raj and Ashby equation can be given as (Fu, Benson et al. 2001; Kim, Hiraga et al. 2005)
ugbs =
2DBa
kT 1
h2 . (2.41)
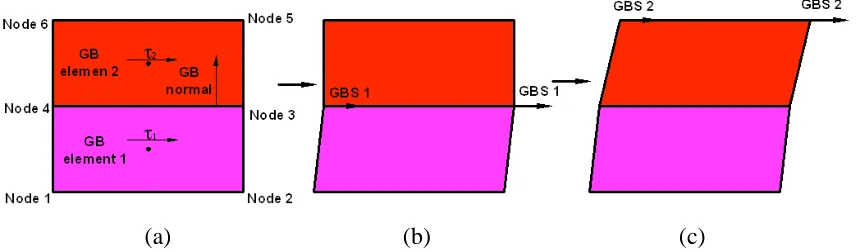
rate (ugbs) is calculated from Eqn. 2.41. The deformation mode of GBS is assumed to be simple shear along the tangential direction of the GB element. Assuming GBS only occurs in the GB elements, and the GBS at the interfacial nodes are given by simple shearing of the lower element (Fig. 2.3b), the GBS on the top nodes are given by the summation of the GBS of the interfacial nodes in element 1 and shear displacement of the top nodes in element 2 (Fig. 2.3c). The total nodal velocity can then be updated by the summation of dislocation-mediated displacement and GBS by Eqn. 2.39.
2.5.
Computational Methods
To update the stress state of the crystalline material, both the total deformation rate
tensor, Dij, and the plastic deformation rate tensor, Dij p
, are needed. A brief outline of the
numerical method will be presented; for further details see Zikry (1994). An implicit finite
element method analysis has been used to obtain the total deformation rate tensor, Dij. The
displacements have been obtained by the quasi-Newton solution of the static-equilibrium
equation, with BFGS iteration to ensure convergence of the quasi-Newton method. Once the
displacements are obtained, the deformation tensor can be calculated. To overcome numerical
problems associated with incompressible displacements, the Bmethod has been used in the
calculation of the deformation tensor. In the B method, the deformation gradient is
decomposed into volumetric and deviatoric parts. The volumetric part of the deformation tensor
is then computed at reduced quadrature points. The resulting volumetric deformation field
eliminates spurious modes that can arise due to incompressible deformations. Once the
deformation tensor is obtained from the updated nodal displacement values, the total
To solve for the plastic deformation rate tensor, Dijp, the time derivative of the resolved shear stress
( )
(
( ))
ij ij d P dt= , (2.43)
is used together with the objective stress rate, and the assumption that the elastic modulus tensor
is isotropic, to obtain the following system of nonlinear differential equations for each active slip-system :
( ) ( ) *
ijkl ij kl
L P D
= , (2.44)
in expending form
( ) ( ) ( ) ( ) ( )
( )
1
2
m ij ij ij ref
ref
P D P
μ =
. (2.45)
It has also been assumed, in the derivation of Eqn. (2.45), that the lattice spin is a
function of the elastic spin in all three directions
( ) * ( )
i W sij j
s = , (2.46a)
( ) * ( )
i ij j
n =W n , (2.46b)
where the elastic lattice spin is obtained as
* p
ij ij ij
W =W W . (2.47)
The solution to the system of ordinary differential Eqn. (2.45) is numerically difficult,
not only due to the nonlinearity of the resolved shear stress, but also because the system of
equation is numerically stiff in certain time intervals. The different time scales pertaining to the
resolved shear stress on each slip-system cause the numerical stiffness. These results in
leads to the growth of numerically propagated error, i.e., instability in the solution of the system
of differential equations. The computational scheme developed by Zikry (1994) is used to solve
the system of Eqn. (2.45). This algorithm is also used to update the evolutionary equations for
the immobile and mobile dislocation-densities.
Since the system of equations given by Eqn. (2.45) is only stiff in some regions of the
integration domain, an explicit fifth-order accurate Runge-Kutta method is used over most of
the time domain. The propagated error is measured by the growth in the local truncation error.
If the time-step must be restricted due to stability and not accuracy, a backward Euler method is
used. The backward Euler method is both A-stable and stiffly stable; it is also an order one
Backward Differentiation Formula (BDF). The algorithm methodology is as follows:
Automatic step control has been achieved by using step doubling on the Runge-Kutta
fourth-order method. Two approximate solutions are taken, one solution of step size 2hand a
second solution with two steps, each of size h. Since the original method is fourth order, the two
numerical methods are related by
(
)
( )
5( )
61
ˆ
2 2
t h h O h
+ = + + +, (2.48)
(
)
( )
5( )
62
ˆ
2 2
t h h O h
+ = + + +, (2.49)
where is of the order 5
(t)/5!. Furthermore, the two numerical methods are combined to
give a solution of fifth-order accuracy
(
)
( )
62 ˆ 2
15
t h O h
+ = + + +, (2.50)
where is the local truncation error which measures how well the solution is approximated
0.20
1
o new old
h =Fh
(2.51)
where hnew is the adjusted time step, and holdis the initial time step. The actual accuracy, 1, is
measured by the supremum norm as max |1-2|, and o is the desired accuracy measured by H. Here is the tolerance level supplied by the user and H is a scaling factor for fractional
errors for the ith equation given by hd dt
+ , where h is the initial time step. The factor F
serves to keep the new time step small enough to be accepted if the truncation error in the next time step is growing. Based on Eqn. 2.51, the time step is increased if the truncation error is
smaller than the desired accuracy, and conversely the time step is decreased if the truncation
error is greater than the desired accuracy.
Since Runge-Kutta methods have finite stability regions, there can be a growth in the
propagated error and, therefore, the time step in certain time domains, can be restricted due to
stability and not accuracy requirement by H. This is an indication of stiff behavior. In the
present algorithm, the largest allowable time step is chosen, i.e., the time step on the stability
boundary. This implies that the local errors are of the same magnitude as the accuracy tolerance
used in Eqn. (2.45). If the time step is unduly restricted due to stability, the solution will
proceed in time, albeit inefficiently, due to the necessity of using intolerably small time steps. To correctly identify the regions of numerical stiffness, and to distinguish a step reduction due to accuracy from a time step reduction due to stability, a stiffness ratio, SR, has been defined as
max 2 1 min Re 1 Re R S t t =
where |Re|max and |Re|min are the greatest and smallest absolute values of the real parts of the
eigenvalues of the Jacobian of the system of ordinary differential equations given by Eqn.
(2.45), and t2-t1 is the time interval of the integration. A large stiffness ratio, SR, indicates that
the ratios of the eigenvalues are dispersed relative to the time scale.
When the time step is restricted due to the presence of these widely varying eigenvalues,
this is a stability problem, and an indication that the initial value problem is numerically stiff. An
increasing stiffness ratio is an indication that for a specified deformation mode, the slip rate,( ) ,
are much greater for one slip-system than for the other active slip-systems; namely, one of the
slip-systems may be dominating the deformation process. The domination of one slip-system
over other active slip-systems can occur, for example, when a macroscopic shear ban is forming
in a crystalline solid (see, for example, Zikry, 1994 (Zikry 1994)).
If the stiffness ratio is increasing, then this is an indication of numerical stiffness, since
the time step is being reduced due to stability considerations. In the present analysis, when stiff
behavior is encountered, the integration is automatically switched to the backward Euler scheme.
The quasi-Newton method has been used to solve the system of nonlinear algebraic equations.
(a) (b) (c)
Table. 2.1. Parameters for Raj and Ashby GBS Rate
Properties k (JK-1) DB (m3) (nm) h (d)
CHAPTER 3
MODELING OF GRAIN BOUNDARY TRANSMISSION, EMISSION,
ABSORPTION AND OVERALL CRYSTALLINE BEHAVIOR IN
1,
3,
AND
17b BICRYSTALS
dislocation-density absorption, transmission and emission are interrelated interactions. These GB processes are directly related to microstructural behavior, and can be potentially controlled for desired material response.
3.1.
Introduction
Grain boundaries (GBs) play a critical role in the mechanical properties of materials in that they can act as barriers or initiators of dislocation activities. Dislocations can be absorbed, piled-up, reflected, transmitted or emitted into or from GBs based on the crystallographic nature and the evolving local properties of the GBs and adjacent grain interiors. The dislocation structures in the GB are very different than those in the grain interior due to various types of partial dislocations and dislocation absorption and accumulation that can arise from GB misorientations (Gemperle, Gemperlova et al. 2002).
the outgoing slip system must be a maximum. These three criteria have been used to understand single dislocation transmissions and to rationalize multiple dislocation activities (Lee, Robertson et al. 1990; Gemperlova J 2002; Gemperlova, Polcarova et al. 2004).
Computational simulations have also provided insights of these GB activities on
different physical scales. Molecular dynamics (MD) simulations have shown that GBs can
act as sinks and sources of dislocations (Schiotz 2004; Van Swygenhoven, Derlet et al.
2006). Dislocations can be absorbed in the GB causing pile-ups (Yamakov, Wolf et al. 2003;
Schiotz 2004) and cross-slip (Yamakov, Wolf et al. 2003). These MD methods provide
insights that may not be possible with TEM in-situ observations on the nano scale. But,
severe limitations on time and length scales may render these simulations ineffective on the
micro-structural physical scale that pertains to the inelastic behavior of crystalline
aggregates.
Finite element models (FEM) and different crystalline plasticity formulations have
provided further insights on GB behavior. Ashmawi and Zikry (Ashmawi and Zikry 2003)
have introduced interfacial GB regions to track slip and dislocation-density transmissions and
intersections for a formulation based on dislocation-density based crystalline plasticity. Other
investigators (de Koning, Miller et al. 2002; de Koning, Kurtz et al. 2003; Dewald and Curtin
2007) have coupled FEM with MD formulations for a multi-scale approach.
neighboring grains in 3 GBs. In these results, by the aid of weak beam TEM, residual dislocations were found to be absorbed in the GB. MD simulations of a 3 GB (Spearot, Jacob et al. 2007) indicate that the GB can also act as source of dislocation nucleation. There were no observable pile-ups in crystalline materials with 3 GBs. For higher angle CSLs, such as, 5, 7, 17, and 19, in which there are no coplanar slip systems, dislocations can pile-up in the GB, resulting in intergranular cracks (Lin and Pope 1995; Zikry and Kao 1996; Su, Demura et al. 2002; Kameda, Zikry et al. 2006).
Hence, it is essential to understand and to predict how different CSL orientations affect behavior at the relevant scale. In this paper, a methodology based on a multiple slip dislocation-density crystalline formulation and specialized finite-element approaches is introduced to predict GB behavior. This approach is used to model and understand the behavior of bicrystals with a representative class of CSL boundaries that span different orientations.
3.2.
Results and Discussions
The multiple-slip crystal plasticity dislocation-density based constitutive formulation and the FE computational scheme are used to investigate material deformation mechanisms associated with low and high angle CSL boundaries in f.c.c. crystalline copper bicrystals. The 1, 3, and the 17b CSL GB orientations were chosen to study the deformation modes and
failure mechanisms in materials separated by these CSL boundaries. These CSL GBs were chosen because they span a wide range of GB orientations in crystalline materials. The 17b CSL GB has one of the largest angles of misorientation about the tilt axis, 86.63°, and the 1 CSL GB has one of the smallest misorientations of less than 15° (Randle 1993). The misorientations of these CSL GBs are given by Table. 3.1.
The material properties that are used here (Table. 3.2) are representative of crystalline copper (see, for example, (Zikry 1994)). The initial immobile dislocation-density, ims, was chosen as 1010 m-2, and the initial mobile dislocation-density ms, was chosen as 107 m-2. The values of the initial and the saturated dislocation-densities are representative of copper (Mughrabi 1987). Based on the scheme developed by Zikry and Kao (Zikry and Kao 1996), we have obtained the coefficient values needed for the evolution of the immobile and mobile densities and the specified material properties. These values are gminter = 5.53, grecov = 6.67, gimmob= 0.0127, gsour= 2.710-5.
assumed that the GB width is 10% of the grain size for different CSL boundaries. To validate the finite element convergence of this scheme, we refined the mesh until we achieved convergence, and a 1600-element convergent model was used (Fig. 3.1).
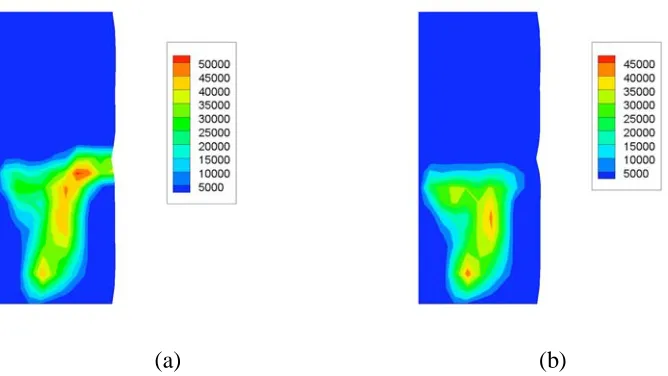
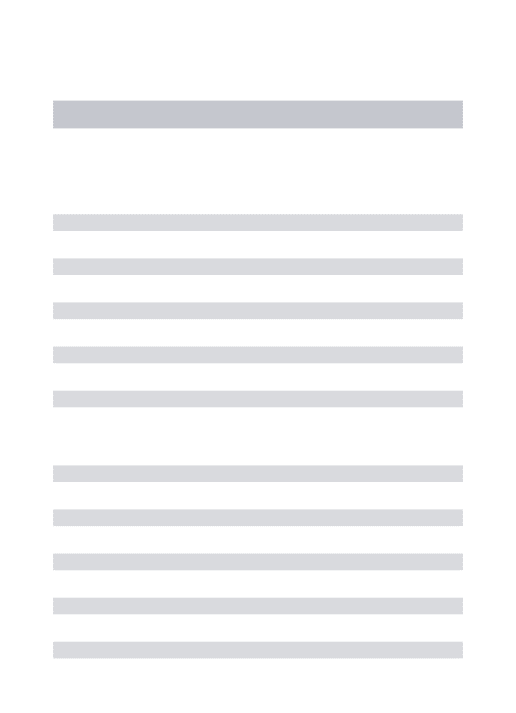
3.2.1. Dislocation-density Transmission
First a comparison is made between an aggregate without the DDGBI scheme and one with the DDGBI scheme. The dislocation-density evolutions of a 3 bicrystal are presented in Figs. 3.2-4 at a nominal strain of 20%. The immobile dislocation-density of the most active slip system 110