Analysis and Control of Mobile Robots in Various Environmental Conditions
Full text
Figure

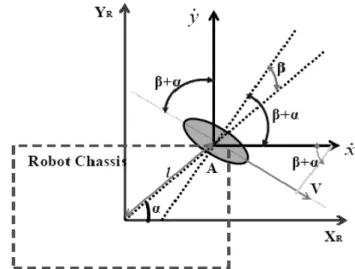
![Fig. 3.5. Kinematic analysis of mobile robot There three fundamental operations during kinematic motion [5]:](https://thumb-us.123doks.com/thumbv2/123dok_us/10944744.2983066/56.918.281.640.117.431/kinematic-analysis-mobile-robot-fundamental-operations-kinematic-motion.webp)






Related documents
(Sabel 1994, 1996a,b; Cohen and Sabel 1997) By delegating specific restructuring or privatization responsibilities to relevant public and private actors, the central
In order to properly model the example above, the designer must treat each load as a “node” and run a voltage drop calculation for each segment between nodes.. Where a node
Function, materials and methods of construction - changing trends and lifestyles - innovations and design ideas - Study on furniture for specific types of interiors like
The com- munity collaboration stage consists of locating service needs in the local community, identifying key stakeholders (e.g., students, older adults, agencies), and mapping
Applications in sealed cover are invited from the Technical Consultants/firms for providing Technical Consultancy for implementation of CCTV based City Surveillance
Within the broad framework of psychosocial rehabilitation, a range of services needs to be available and the mix tailored to the needs of each client. For example, if someone wants to
Initial HTML Form or URL Generated HTML Form Client 1 MATLAB Client n http daemon matweb matlabserver M-files Data Graphics Initial HTML Form or URL Generated HTML
• ServerSocket(int port, int numberOfClients, InetAddress address) throws java.io.IOException, java.lang.SecurityException —binds the server socket to the specified port number,
