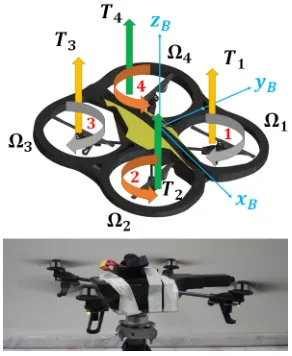
Design and Development of a Novel Controller for Robust Attitude Control of an Unmanned Air Vehicle for Nuclear Environments
Full text
Figure
Related documents
Software quality is often measured in terms of both external usually indirectly measureable quality attributes and internal often directly measurable software metrics.
According to the article published in the journal surgical clinics of North America, primary colorectal cancer causes 53% of acute large bowel obstruction
Mother’s milk is the only food a baby needs the first 4-6 months of life.. Bottles of human milk should be labeled with date expressed and
Chronic Ulcers pose significant and challenging health as well as economic problems, as it needs long term surgical and nursing care whether it is á Burn
For example, high-contrast mammography films, such as MIN-R 2000 Plus Film, are frequently exposed at an optical density between 1.60–1.90 in order to maximize contrast. The
The Raam soil moisture monitoring network and the men- tioned additional data sets provide a valuable and ongoing data set for investigating water management applications, for
To examine the interaction effects of assortativity within a network and assortativity between networks in detail, networks with different assortativities were constructed and
