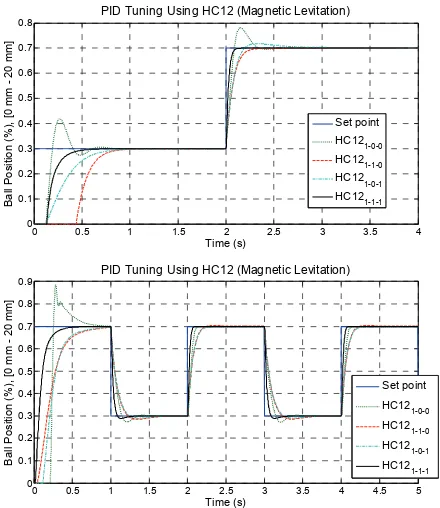
HC12: Efficient Method in Optimal PID Tuning
Full text
Figure
Related documents
The Finding the Integrated Multi-Channel Retailer: Benchmark Study 2008 was designed to measure how retailers are addressing cross-channel consumer product research and
Macquarie Infrastructure and Real Assets (Europe) Limited is not an authorised deposit-taking institution for the purposes of the Banking Act 1959 (Commonwealth of Australia), and
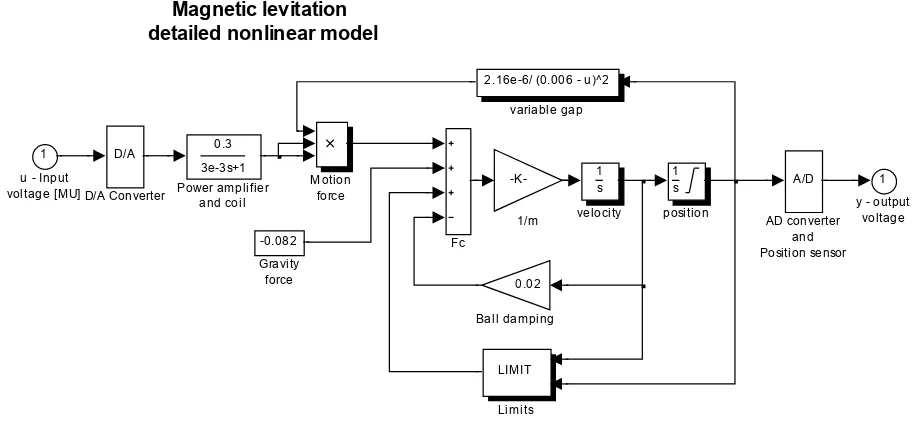
This paper focuses on design and analysis of cascade P/PI position controller and an inverse-model- based disturbance observer (IMBDO) for disturbance forces
Axillary branching using axillary bud and stem node, as in other plants, is the majority common explant type utilized for direct shoot propagation of Dieffenbachia.. However,
The CSE-UCLA model is an evaluation model that has five dimensions of evaluation (system assessment, program planning, program implementation, program
terminal; Blimp-1: B lymphocyte-induced maturation protein-1; BRD: Bromodomain; CDK4: Cyclin-dependent kinase 4; CDK6: Cyclin- dependent kinase 6; CLPs: Common lymphoid
These two forest landscapes, namely the Reinhardswald and the Kellerwald-Edersee National Park, are very suitable study areas due to a wealth of data on landscape attributes,
As a part of that research this paper presents an in depth analysis of face recognition system based on Local Binary Pattern(LBP), Local Configuration Pattern
