2016 6th International Conference on Information Technology for Manufacturing Systems (ITMS 2016) ISBN: 978-1-60595-353-3
1 GENERAL INSTRUCTIONS
Compared with the traditional sensor, MEMS sensor has the advantages of fast response, low power consumption, small size, small volume, high added value and good reliability. It is suitable for mass production[1].
Since the first silicon micro pressure sensor was created in 1962, the MEMS sensor products and the studies of the products include pressure, force, torque, acceleration, speed, position, temperature, magnetic field, flow rate, gas composition, humidity, ion concentration and micro gyroscope. The sensor is widely used in aerospace, life science, industrial automation, environmental protection, household appliances, automotive, agriculture and other fields[2-4]. In recent years, China put focus on the research of the micro pressure sensor, micro inertial sensors and micro fluid sensor etc[5-7]. Due to historical reasons, the dispersion of the power, coupled with inadequate investment. There have been many achievements, but there is still a big gap compared with foreign countries in terms of quality, price and commodity.
There is a problem that cannot be ignored: After more than ten years of rapid development, both at home and abroad MEMS field has made great progress, but with the development of research, people began to realize that there are still many basic problems in the MEMS study which have not been solved, so some micro mechanical systems show situation: "can't move, can't use"[8]. The reason is that the people don't know the motion law of the micro mechanical system under the condition of the micro well and the lack of understanding of physical properties of micro nano component and its mechanical behavior under load. A theory based on
the micro system design theory and method was not yet formed. Therefore it is only by experience and tentative to research.
In addition, the MEMS sensor uses a series of micro machining technology to bulk production. This process of micro devices are unlikely to each parameter and design value, especially when using photolithographic technology and other technology mass production, it exist inevitable machining tolerance, the structure of the after processing has large difference with the ideal design structure. As are result, the structure of the micro sensor size, performance parameters and working conditions and so on will have certain variation with design value, so it has influence on the actual use of performance of the sensor. Robust design is an engineering method[9] that by adjusting the design variables and controlling the tolerance to ensure the quality of products, when the controllable factors and uncontrollable factors occur variation with design value. So, the robust design of MEMS sensors can consider the impact of these variation in the design process to guarantee the reliability and robustness of the performance. And the small variation of structural parameters of MEMS devices impact on the quality of its performance more significantly than the macro structure[10-11]. As a result, robust design has great significance for the development of the MEMS sensors.
Therefore, our research group put robust design ideas into the design of MEMS micro sensor. By considering controllable factors and uncontrollable factors affect in the performance of MEMS sensors, the group developing the robust design of MEMS sensor general principles and methods. The robust design theory and the modeling method of MEMS sensors which based on the tolerance model, the
Robust Design for MEMS Sensors Based on the Fuzzy Model
Xiaolan Tan, Lina Han, Jie Kang Jie
College of Mechanical and Materials Engineering, North China University of Technology, Beijing, China
ABSTRACT: First, the general theory of robust design based on fuzzy model is developed. Secondly, for a kind of capacitive MEMS pressure sensor as example, the robust design method is researched after the analyses of its structure and working principle. A mathematical model of robust design based on fuzzy model is developed. The results of robust design by programming are given.
stochastic model and the fuzzy model are studied respectively. This paper mainly discusses the robust design problem of the MEMS sensor based on fuzzy model.
2 THE THEORY OF ROBUST DESIGN BASED
ON FUZZY MODEL
For MEMS sensor, there are a lot of the evaluation factors are fuzzy in the process of design and manufacture, such as the quality of product is good or bad, high or low cost. It is difficult to use a clear amount to clear borders or boundaries of good or bad and high or low. In addition, the design parameters like load coefficient, the safety coefficient is usually given a selection scope of the value in the design specification, it is also a kind of fuzzy characteristics parameters. Therefore, when a design problem consider this kind of fuzzy factors, the objective function and constraint functions contains is also fuzzy events.
Suppose Ω is the sample space of a randomized
trial E,
ϖ
express basic event. Then anyone A~ of the fuzzy which is set in Ω called a fuzzy event ofa randomized trial E.If the membership function
) (
~ϖ µ
A and the probability density function f( )ϖ are
the integrable function in Ω , then fuzzy event
probability A~ be defined as[11]
( )
A µ ϖ f ϖ dϖP ~
∫
A~( ) ( ) Ω= (1)
Among them, f( )ϖ is the probability of basic
event
ϖ
occurs, µ~(ϖ)A is membership function of
the basic event ϖ relative to A~.
In fuzzy mathematics, membership function of the domain of real number domain is called fuzzy distribution. Commonly used fuzzy distribution mainly are rectangle or half rectangle distribution, half trapezoid and trapezoid distribution, k parabola distribution,Γtype distribution, normal distribution,
the Cauchy distribution and the ridge shape distribution, etc. When processing the actual problem with the fuzziness by fuzzy mathematics, it is very important that select the appropriate fuzzy distribution function, if it is not handled properly, the result will be far away from the actual situation, thus affecting the effect.
In robust design of MEMS sensor, controllable factors which is design variables x=(x1,x2,L,xn) and
noise factor z=(z1,z2,L,zm) is generally random
changes, but the allowed values or changes in scope may be vague, so x、
z
may become a fuzzy- random variableBecause of x、
z
fuzzy randomness, constraint function gk(x,z) is also a random function, butsometimes constraints are often vague. Therefore, fuzzy probability method is used to study and deal with constraint condition conforms to the
requirements of practical engineering problems. Assuming that fuzzy constraint condition has a form like gk( , )x z ≤G%, and its membership function is known. Due to the randomness of g x zk( , ), constraint conditions is a fuzzy event. It uses the range of
) , (x z
gk as domain of discourse, written as Bk ~
, its membership function is ~( k)
Bk g
µ . If fuzzy constraint
satisfactory level of acceptable probability is βk in
the probability space, gk(x,z) distribution density
function is f(gk) , The robustness of fuzzy
constraints can be controlled by the following formula
∫
−+∞∞≥
k k k k
Bk g f g dg
β
µ~ ( ) ( ) (2)
Obviously, the greater the value of βk, then the
smaller the design feasible region.
Define consists of all the constraint conditions of fuzzy constraint space G~ are fuzzy feasible region, the formula is expressed as
} ,... 2 , 1 ], 1 , 0 [ , )
( ) ( { ~
~ g f g dg k m
G Bk k k k k k
= ∈
≥ =
∫
+∞
∞ −
β β µ
(3) Objective function is generally decided by the design characteristics of the product. Because of the design characteristics of the product can be expressed as linear or nonlinear function of design variable and fuzzy parameters, so design feature is also a fuzzy parameters. Even if it is a design features clearly, when it is used to determine the objective function, the objective function can also be regarded as a fuzzy parameter. Because the scheme’s good or bad itself is a fuzzy concept, and there is no clear boundaries and standard. The merits of the design or the quality of the design quality can be described by fuzzy probability P(A~) of quality characteristics y relative to the fuzzy set A~
( )
∫
+∞[
]
∞ −
∈ = ( ) ( ) 0,1
~
~ y f y dy A
P µA (4)
It can be seen by the formula(4), P(A~) can be understood as the mathematical expectation or probability of average of µA~(y).
3 THE MODELING OF FUZZY ROBUST
DESIGN
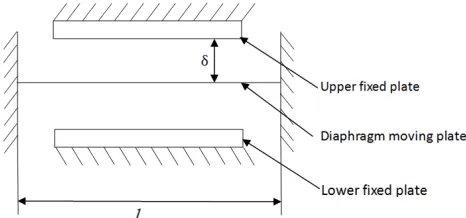
Figure 1. Structure diagram of micro capacitive pressure sensor.
3.1 Design variable
Main parameters which affect characteristics of capacitive sensor are the distance between plates, displacement of the plate and obverse relative area between the plates. Moreover displacement of the plate relate to moving plate diaphragm deflection. So the design variables of the model have the initial distance δ between plates, obverse relative area
between the plates, namely the area S of the top and bottom plate, side length l and thickness h of moving plate square film, and the tolerance of these parameters. That is:
(
)
T(
)
Th
l
S
h
l
S
x
x
x
x
=
,
,
,
=
,
,
,
,
∆
,
∆
,
∆
,
∆
8 2
1
L
δ
δ
(5)
3.2 Noise parameters
The noise factors which affect the sensor performance are: the external load, the membrane elastic modulus, Poisson's ratio of the film, permittivity of vacuum, relative dielectric constant of the air, the thin film yield strength.
(
)
(
)
Ts r T E P z z z z z z
z= 1, 2, 3, 4, 5, 6 = , ,µ,ε0,ε ,σ (6)
3.3 The objective function
With larger-the-better characteristics of capacitance change rate as objective function, that is[13,14-15]:
( )
22 1 1 1 y S y y
L =ω +ω (7)
Among them, ω1,ω2 are weighting coefficient and
δ µ 3
2 4(1 )
0318 . 0 Eh Pl C C
y= ∆ = − (8)
3.4 Fuzzy restriction condition
Starting capacitance for capacitive sensors of the pole pitch changing type is generally less than 100PF, the distance between plates is about 20 ~ 200
m
µ , and the maximal displacement should be not
more than 1/20 of the plate’s distance, the area of the fixed plate should be smaller than the area of the moving plate film, the film’s maximum stress should be less than the yield strength. So the fuzzy constraints are: 0 ~ 0 ~ 0 05 . 0 ) 1 ( 0159 . 0 ~ 0 10 1 ~ max 4 2 3 3 2 4 2 10 0 1 ≤ − = ≤ − = ≤ − − = ≤ × − = − s r g l S g Eh Pl g S g σ σ δ µ δ ε ε (9) Among them 2 2
max 0.255
h Pl
=
σ (10)
3.5 The fuzzy robust design model
To sum up, establish fuzzy robust design model
(
)
U i i L i j y T T x x x j g P t s S y y L h l S h l S x x x x ≤ ≤ = ≥ ≤ + = ∆ ∆ ∆ ∆ = = 4 , , 2 , 1 ) 0 ~ ( . . 1 ) ( min , , , , , , , ) , , , ( 2 1 2 1 8 2 1 L L β ω ω δ δ4 THE METHOD OF CALCULATING THE
FUZZY ROBUST DESIGN
The membership degree that fuzzy parameters obey the membership function is affected [16] by these
factors such as design, manufacturing levels. The factors that have influence on membership degree value and the influential degree are as shown in table 1.
Because the membership values are in the range of [0, 1], take alternative sets of the membership degree
{
0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1.0}
=T
λ (11)
According to the production condition of the sensor and the conditions of use, take the weight coefficient of various factors
{
0.3,0.25,0.2,0.1,0.15}
=T
ω (12)
According to the design, manufacturing level and other factors of sensors, determine the evaluation matrix = 0.0 0.0 0.2 0.6 0.8 1.0 0.9 0.6 0.3 0.1 0.0 0.5 0.7 0.9 1.0 0.8 0.6 0.4 0.2 0.1 0.0 0.0 0.0 0.0 0.1 0.3 0.6 0.8 1.0 0.9 0.6 0.3 0.1 0.0 0.1 0.3 0.7 0.9 1.0 0.9 0.7 0.3 0.0 0.0 0.0 0.1 0.3 0.7 0.9 1.0 0.9 0.7 0.3 0.0 0.0
R (13)
0.02, 0.075, 0.34, 0.675, 0.87, 0.92, 0.815, 0.635, 0.305, 0.125, 0.05
T
B=ω R=
(14)
Solve degree of membership using the weighted average method
∑
∑
= = =
11 1 11
1 *
i i i
i i
b b
λ
λ (15)
When the membership degrees are substituted into membership function, the fuzzy parameter values are obtained.
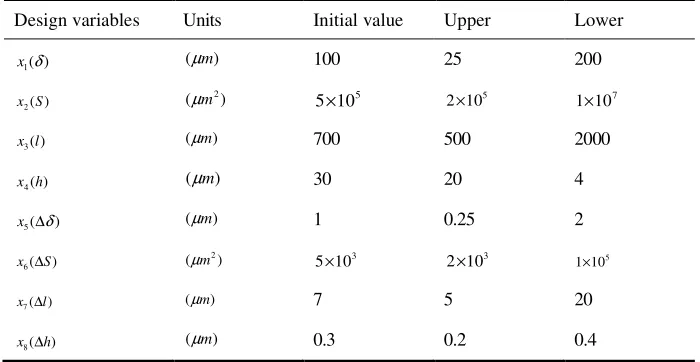
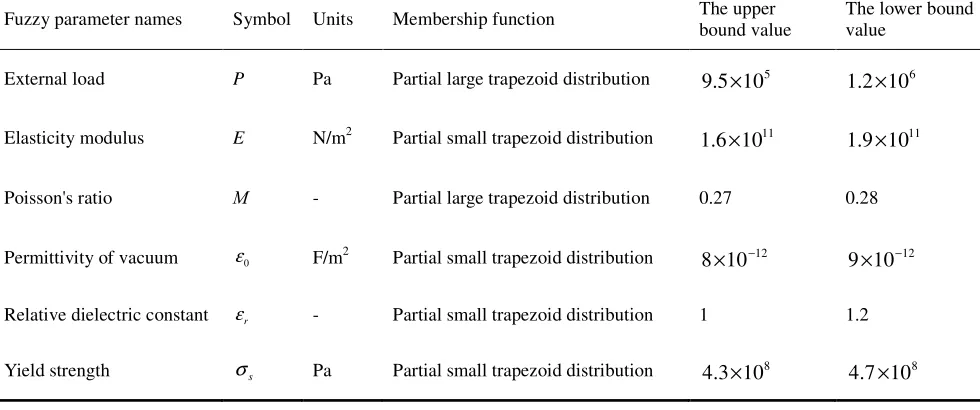
According to the above analysis, the
mathematical model and the design parameters, fuzzy parameter value are written into robust design algorithm program of this research group. Initial conditions: initial values and the upper and lower values of design variables as shown in table 2, membership functions and upper and lower bound of fuzzy parameters as shown in table 3.
Through the program calculation, the results obtained by fuzzy robust design are shown in table 4. Finally, with analog computation and reduction formula of mean and variance between basic functions, mean and variance of capacitance change rate y are respectively 0.0962 and 0.0012.
5 CONCLUSION
In this paper, the robust design method based on fuzzy model is effectively used in the design of the MEMS capacitive pressure sensor. Not only the tolerance problem of design variable is considered, but also impact of the uncontrollable factors on design results, such as the fuzziness of the performance parameters of the material and external load. Therefore, in actual application, when the actual parameters and the design value have small change within tolerance range, or various noise factors make the sensor working conditions or environment change, the design of the sensor still can guarantee the product robustness of performance index, and improve product quality, reduce the processing cost.
ACKNOWLEDGMENTS
[image:4.612.131.481.561.742.2]We acknowledge the support of Natural Science Foundation of China (Approval Nos. 51375017, 51305005).
Table 1. Effect factors and degree.
Effect factors U Degree
1 2 3 4 5
The design level u1 Highest Higher General Lower Lowest
Manufacturing level u2 Highest Higher General Lower Lowest
Material u3 Best Better General Bad Worse
Degree of importance u4 Most important More important Importance Marginal importance Unimportance
Use conditionsu5 Best Better General Bad Worse
Table 2. Initial value and upper and lower bound of design variables on the value. Design variables Units Initial value Upper Lower
) (
1δ
x (µm) 100 25 200
) (
2 S
x (µm2) 5×105 2×105 1×107
) (
3 l
x (µm) 700 500 2000
) (
4h
x (µm) 30 20 4
) (
5 ∆δ
x (µm) 1 0.25 2
) (
6 S
x ∆ (µm2) 5×103 2×103 1×105
) (
7 l
x ∆ (µm) 7 5 20
) (
8 h
Table 3. Membership function and the upper and lower values of fuzzy parameters.
Fuzzy parameter names Symbol Units Membership function The upper bound value The lower bound value
External load P Pa Partial large trapezoid distribution 9.5×105 1.2×106
Elasticity modulus E N/m2 Partial small trapezoid distribution 1.6×1011 1.9×1011
Poisson's ratio Μ - Partial large trapezoid distribution 0.27 0.28
Permittivity of vacuum ε0 F/m2 Partial small trapezoid distribution 8×10−12 9×10−12
Relative dielectric constant εr - Partial small trapezoid distribution 1 1.2
Yield strength σs Pa Partial small trapezoid distribution
8
10 3 .
4 × 4.7×108
Table 4. Results of robust design parameters.
Design variable Units Result Design variable Units Result
) (
1δ
x (µm) 27.5 x6(∆δ) (µm) 0.3
) (
2 S
x (µm2) 5×105 ( )
7 S
x ∆ (µm2) 2×103
) (
3l
x (µm) 912.8 x8(∆l) (µm) 5.0
) (
4 h
x (µm) 36.2 x9(∆h) (µm) 0.3
REFERENCES
[1] Bo Jikang. Micromechanical pressure sensor structure robust optimization and experimental study [J]. Mechanical Science and Technology, 2013, 30 (6): 68-72.
[2] Julian W. Gardner, Microsensors: Principles and Applications, John Wiley & Sons, Chichester, New York, 1994
[3] Zuech N (ed.). Handbook of Intelligent Sensors for Industrial Automation, Addison-Wesley Publishing Company, Inc. , USA, 1991
[4] Ohba R (ed.). Intelligent Sensors Technology, John Wiley & Sons, Inc. , New York, 1992
[5] Wang Zheyao, Wan G Chao, Liu Litian. Design and analysis of a PZT·-based micromachined acoustic sensor with increased sensitivity[J]. IEEE Trans. on Ultrasononics, Ferroelectrics, and Frequency Control, 2005, 52(10): 1 840-1 850.
[6] Gu Lei, Huang Qingan, Qin Ming. A novel capacitive type humidity sensor using CMOS fabrication technology[J]. Sensors and Actuators B, 2004, 99(2-3): 491-498.
[7] Zheng WeiBin, Huan G QingAn, Liao XiaoPing. RF MEMS membrane switches on GaAs substrates for x-band applications[J]. Journal of Systems, 2005, 14(3): 464-471. [8] Wen Shizhu,Ding Jian-ning.micro-mechanical design of
basic research, Mechanical Engineering, 2000, 36 (7): 39-42
[9] Chen Lizhou. Robust design [M]. Machinery Industry Press, 2000.
[10] Feng Lijie, Ma Binghe, Mazhi Bo, Zhu Yanbo Influence of processing deviation on performance of silicon-based micro piezoresistive pressure sensor[J].Aviation Precision Manufacturing Technology, 2010, 46 (2): 13-16.
[11] Tan Xiaolan. Research on general principles and methods of robust design of mechanism[D]. Beijing: Beijing University of Science and Technology, 2004.
[12] Shen Wenqing, Hu Fangfei. Design of Micro-mechanical Capacitive Acceleration Sensor with Biax[J]. Electronic Science and Technology, 2014, 27(9): 128-131.
[13] Kang Jie,. Robust Design Method of Micro Sensor [M]. North China University of Technology, Beijing, 2015. [14] Hsin-Nan Chiang, Tsung-Lin Chou, Chun-Te Lin, et al.
Investigation of the hysteresis phenomenon of a silicon-based piezoresistive pressure sensor[J]. Microsystems Packaging Assembly and Circuits Technology, 2007 .10: 165-168.
[15] Chen W, Zheng X, Chen X. Optimized design of piezoresistive pressure sensor for improved linearity and sensitivity[C]//Nano/Micro Engineered and Molecular Systems (NEMS), 2010 5th IEEE International Conference on. IEEE, 2010: 561-564.