A NOVAL METHOD FOR INTERACTIVE IMAGE
SEGMENTATION BY USING BAYESIAN NETWROK
MODEL
B. Prasanna Kumar
1, B. Suresh
2G. Samrat Krishna
31
Research Scholar, Acharya Nagarjuna University, Guntur, Andhra Pradesh
2
Head of the Department & Associate Professor, Dept. of Computer Science,
Vikas Group of Institutions, Nunna, Vijayawada
3
Asst. Professor, Dept. of Computer Science, Sri Vani Group of Institutions, Vijayawada.
ABSTRACT
While we watch image our earlier knowledge about the world permits us to determinate some of the uncertainties that are essential to monocular visualization, we also identify dissimilar objects, decide on their positioning, and classify how they are joined to their situation. We suggest a new Bayesian network (BN) model for both programmed and communicating image division. A multilayer BN is constructed from an over segmentation to model the statistical dependencies among super pixel regions, edge segments, vertices, and their sizes. Given the BN model and numerous image sizes, certain transmission is achieved to modernize the possibility of each node. Image separation is generated by the most credible clarification interpretation of the true states of both region and edge nodes from the updated BN. While existing interactive segmentation (IS) methods often inactively depend on the user to run exact interference, we suggest a novel active input selection method to afford proposals for the user’s interference. Such interference can be suitably unified into the BN model to accomplish vigorously IS. We assess the proposed model on both the Weizmann dataset and VOC2006 cow images. The results validate that the BN model can be used for automatic segmentation and more outstandingly for actively participate in IS. The experiments also show that IS with active input selection improves both overall segmentation accuracy and efficiency over IS with inactive interference.
Index Terms: Active labeling, Bayesian network (BN), image segmentation, interactive image
segmentation
I. INTRODUCTION
Our earlier information about the world permits us to decide estimated depth in the image. While image
separation is a difficult in computer visualization. It goals at separating an image into essential regions of
interest. Several methods have been suggested earlier which including the clustering method [1], region growing
[2], active contours [3], normalized cuts [4], graph-cut-based approaches [5], Markov random fields (MRFs) [6],
etc. These methods are basically data-driven methods. The data-driven methods sometimes fails to produce
When there is shadow, obstruction, littering, low contrast area, or noise in the image, the line and region
demonstration are joined by increasing the image by 2 inches in each direction so that the image points both
indices in-peculiar. Margins are formed by connecting the points in the grid where both indices are even. This
method was designed to streamline the procedure of critical regions, reunion regions and defining the things of
areas as a whole. The simple region has merging method set above is taken from this paper. An important
standard is that by reunion of two regions, the entire margin should be somewhat less than the entire boundary
length of the unique regions. The second principle is the asset of the margins between the two regions. This
paper should reports on using the regions for appreciation of the block structures in the image. Some prior works
have already tried to join certain prior knowledge into image separation. Nguyen and Ji [7] integrated
smoothness and domain knowledge into the increasing of region boundaries in the watershed algorithm. Chan
and Zhu [8] combined a over-all shape earlier into the active delineations separation. By integrating the prior
knowledge, these approaches successfully improve separation in different circumstances, where the purely
data-driven methods might be fail. In addition to that the MRF-based approach is frequently used to capture assured
prior data or information. It can be encrypt the local spatial association/relationship among the random
variables. However, these MRF is not active in capturing the global spatial relationship/association or
long-range interaction. While the additional hidden layer is usually added to the model, such relationships [10] makes
the MRF model is more difficult and computationally ineffective.
One of the most significant challenges for developing the successful visualization algorithms are effectually
model high level knowledge / data and to integrate the users purposes in the computational algorithms. We are
fascinated in expending semi-supervised learning to achieve the computational or different tasks of
collaborating visual information processing. There are several works on collaborative image separation. They
determine the effectiveness of the user’s involvement for enlightening the segmentation. However, these
methods mainly abuse a limited type of user involvements. The user normally stretches on hard controls by
protective the labels of definite pixels or group of pixels without considering the uncertainties in the user’s
involvement. Other types of users’ involvements are used very rarely in these works. In this paper, we aim to
finding the object boundary from the edge map of an over segmented image. We suggest a Bayesian network
(BN) [19], [20] to model this separation problem into a probabilistic way. Specially, a multilayer BN is built for
model regions, vertices, edge segments and their sizes, and their causal relations. The BN also captures some
local constraints to confine the relationships among image beings. Given the BN, image segmentation /
separation is performed through a probabilistic implication. It is very easy to incorporate new constraints and
measurements into the model. The human involvement can be straightforwardly added into the model as new
indication in an interactive, incremental and sparing manner. This representative makes the proposed BN model
is very suitable for collaborative image segmentation / separation. In addition to that we advise a novel active input selection process to habitually generate a ranked list of candidates for the user to choose as the user’s next involvement. This procedure can efficiently reduce the total user’s participation for performance development.
The effects of newly input signal are analytically transmitted through entire BN via acceptance transmission. In
this way, unnatural segmentation can be done in an incremental and interactive manner, completely utilizing the
previous segmentation / separation outcomes.
In present study an automatic image segmentation [27] introduces a united graphical model joining the directed
graphical model with the directionless graphical model. It permits more complex and heterogeneous
relationships among image individuals. While comparing with BN model proposed in this paper, the combined
graphical model is more sensitive and more powerful. However the unified model only used for automatic
segmentation/separation. In difference, this paper efforts on interactive image segmentation with the human in
the loop. This paper also integrates an active learning approach into the interactive image segmentation, which
is new for this domain. While automatic image segmentation has several semi-automatic segmentation methods
which have been proposed earlier. Intelligent scissors [13] allows the user for seeds to guide the
segmentation/separation algorithm to find the lowest-cost path from the pointer position to the latest seed
position. For rough images, the lowest-cost path may be complex to the pointer position, and extra seeds are
needed to achieve a suitable result. Boykov and Jolly [5] demonstrated segmentation as an energy minimization
problem and also used the graph-cut technique for solving the optimization problem. The user delivers some
tough constraints that indicates assured pixels to be a parts of the object or the background. “GrabCut” [11]
spreads the graph-cut segmentation [5] by dropping the human involvement to tiresome rectangle round the
preferred object.
While these communicating methods are fairly successful, most of them passively depends on the user to choose
the next involvement and performs separation/segmentation in a group approach. Sometimes it is very difficult
for the user to select the most important intervention. An automatic process can suggest useful user intrusion
and reduces the user’s contribution would be more necessary. In addition to these existing methods has
classically integrate only one type of the user’s intrusion, and the intrusion is often done in adhoc way, regularly
overlooking the existing separation / segmentation outcomes. Furthermore, the user’s intrusion is often provided
as hard restraints without considering their doubts, and it is usually starts earlier segmentation. Imitating the
human’s decision method, it may be an extra beneficial for providing different types of intrusions, and to
account their doubts, to provide intrusions at any time of the separation / segmentation procedure, and also to
integrate the user’s intrusion with existing segmentation outcomes incrementally.
III. IMAGE SEGMENTATION FRAMEWORK
Segmenting / separating the natural images habitually in a bottom up fashion, it has a long history but has not
been successful for a modern example and their earlier situations. While two more recent and productive trends
are class driven segmentation, where object class models are proposed in object localizations that can be refined
in more local (bottom up) image segmentation, while interactive segmentation in human provisions delivers an
estimated segmentations and then improves their groups, automatically generates the image centered
segmentations. For example, consider a colour based segmentation of a patchy cow – a virtuously bottom up
segmentation, determines tend to discrete the image into various dissimilar regions rather than identifying the
cow as a solo, coherent object – there is a perfect need for segmentation and appreciation to work together.
Several class driven recognition and segmentation algorithms characterize the object class or texture by using
the multiple examples. One of the role of this paper is to show the equal or superior gratitude results can be
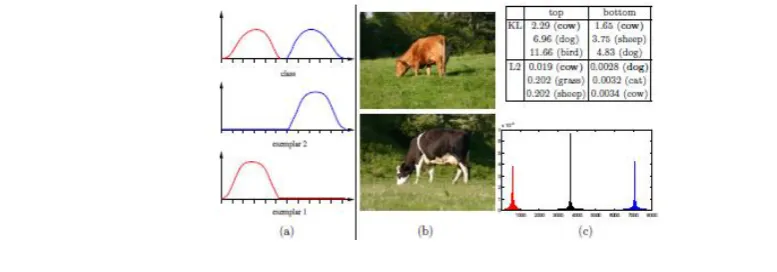
Fig. 1: The image database (a–c)
Example images from the MSRC database from (a–c) and their ground-truth class separation / separation plots.
The colour specifies the object class with dissimilar varieties of grass, for example- related with a shared “grass”
label. Note that the existence of unlabeled (black) pixels, by a single class model and if a suitable distance
measure is used and also explain why this result derives about. While the second role of this paper is to indicates
pixel-wise segmentations which can be acquired from sliding windows by using class representations. Now
further aspect we characterize an object group by a single histogram of compressed graphical or visualize words
and examine the efficiency of this representation for segmentation. The benefit of a single class histogram is a
very dense therefore computationally efficient representation. Histograms of visual or graphical words have
been used formerly for region or image level organization, however for the most part is based on the thin
descriptors. Others have been used thick descriptors that only considered for easy-going separations which is
based on the support of the visual or graphic words rather than the obvious pixel-wise grouping.
IV. CLASSIFICATION WITH REGION LEVELS
Here we compare accuracy of discrimination of our representations with that completed proposals of Gaussian
model. Next we see evaluation methodology, we need to categorize each input test region as region-1 which are
fitting to one of the different cases of cows persuade different proportions of visual or graphic words. A united
“cow” model histogram (c) contains dissimilar “models” for the various visual aspects and types of the
instances. (a) It provides a schematic visualization. (c) It shows the mode of corresponding to the top cow
(b) It shows red (left) and for the bottom cow in blue (right). The lasting visual words of the cow-model shown
in black in the middle. However a simple sorting of the visual or graphic words has been active to carry out the
altered modes. Table shows the distances of the cow paradigms in (b) to the class models (it shows the nearest
class in bold). KL deviation flouts zero bins in the probe histograms and it is better for suited in this scenario
V. CONCLUSION
In this paper, we first suggest a model-based segmentation / separation models/approach based on BN. While
BN is steadily encrypts the relations among vertices, edge segments, regions, angles, and their measurements.
The BN also models the native softness limitation and the modest connectivity limitation. Given the BN model,
image segmentation performs through trust or belief proliferation and probabilistic implication. The last division
is completed by finding the MPE outcomes that is steady with all the dimensions and limits. The pixel has
labelling results which demonstrates our class histograms and it can also be used to segment out of the objects.
A normal next step is to combine such labellings with a dissimilarity dependent on prior MRF in the methods of
which in-order to get the crunchy separation boundaries. Otherwise the subsequent pixel maps can be used to
adjust graph-cuts procedures automatically rather than manually. While in future work we compare performance
of the single class histograms alongside normal discriminative classifiers trained on the paradigms. In order to
that an SVM can be trained on sliding-window histograms for pixel-wise arrangement or as in the work of
fragile classifiers can be built from histograms of visual or graphic words within gliding rectangular regions and
then joined into a discriminative classifier using enhancing.
Finally, it can be simply prolonged to deal with multiclass separation / segmentation. This can be done in two
different ways. Firstly, we can design a series of BN models for segmenting each class against the background.
Relating to this models will produce a multiclass separation / segmentation. Second, we can spread the binary
nodes (especially the region nodes) in the BN to discrete nodes with numerous states for allowing the unique
various object classes. The local constraint is the connectivity constraint that should be transformed