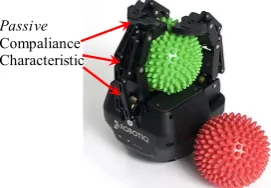
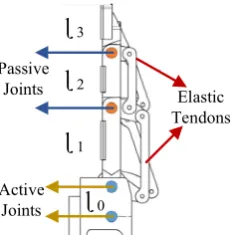
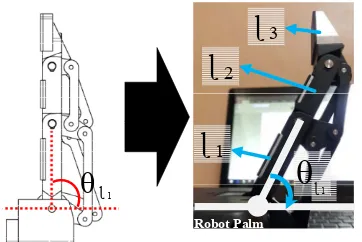
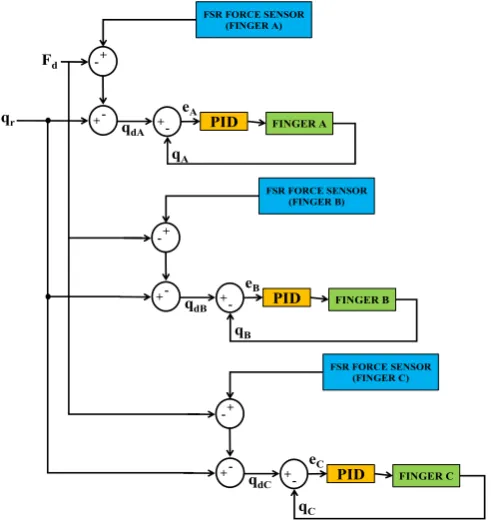
Force control for a 3 finger adaptive robot gripper by using PID controller
Full text
Figure

Related documents
According to two different measures of the richness of civil society – first as the number of development related CSOs relative to population size, and second as the proportion of
During the following three weeks, they developed the communication between the sensor node and the base station using the messages and very simple protocols defined in our... They
In the present study, three different dosages of GAGP at a concentration of 100, 200, and 400 mg/kg of BW showed a significant difference (p < 0.05) at day-8 of treatment
The ScalaDyno compiler 1 plugin allows fast prototyping with the Scala programming language, in a way that com- bines the benefits of both statically and dynamically typed
• Just as a driver does not stay at the yield sign, a peer counselor will continue to provide support to a new mother while the WIC designated breastfeeding expert is helping
The Museum, through its curators, Registrar and conservation department, will maintain accurate, up-to- date records on the identification, location and condition of all objects in
Specifically, price-liberalization reforms exhibit a direct positive relationship with growth, while the relationship between large-scale regional privatization activity (as well as
Category I: The relationship between SFR care model and clinical outcomes such as improvement in maternal and neonatal health outcomes, including neonatal weight gain,
