2016 International Conference on Computational Modeling, Simulation and Applied Mathematics (CMSAM 2016) ISBN: 978-1-60595-385-4
Research on Indoor Positioning Algorithm Based on Trilateral
Positioning and Taylor Series Expansion
Ning GUAN
1, Zhi-gang WEN
1and Ke-gang SUN
2 1School of Electronic Engineering, Beijing University of Posts and Telecommunications, Beijing, China
2
Xiaomi Communication Technology Co. Ltd., Beijing, China
Keywords: Trilateral positioning, Taylor series expansion, Centroid, RSSI.
Abstract. The paper firstly introduces the trilateral positioning and Taylor series expansion. In order to solve the problem of low positioning accuracy of trilateral positioning and being sensitive to the initial value of Taylor series expansion, the paper proposes an indoor co-location algorithm based on the trilateral positioning and Taylor series expansion. Next, an actual indoor position system is designed based on the proposed algorithm. The experimental results show that the co-location algorithm improves positioning accuracy and reduces error, which is suitable to the actual indoor positioning.
Introduction
With the rapid development of the mobile Internet, more and more indoor applications are gradually penetrating into every aspect of our lives which call for a high demand of positioning precision and accuracy. The Global Positioning System (GPS) has been used in many scenarios, providing a good location-based service for the outdoor applications. However, the GPS positioning requires clearance to maintain the smooth flow of satellite communication links, besides, roof and wall of interior architecture will attenuate and disperse the satellite signal, which causes the weak penetration of the satellite signal and the fast fading, so the GPS positioning is not suitable to the indoor positioning. To solve the problem, various indoor positioning come into being.
According to the positioning technology, indoor positioning technologies include WiFi positioning, Bluetooth positioning, Ultra-Wideband positioning, light positioning [1], Zigbee positioning, RFID positioning [2]. According to the positioning principle, the indoor positioning algorithm can be divided into range-based and non range-based algorithm. The non range-based algorithms do not need to measure the distance between nodes, including centroid localization algorithm, DV-HOP, Amorphous algorithm, APIT algorithm. Range-based algorithms include trilateral positioning, triangulation positioning [3] and Taylor series expansion [4]. Range-based algorithms firstly measure the distance between nodes, then calculate the position with the geometric relationship.
Indoor Signal Propagation Model
Indoor signal propagation model refers to the radio waves spreading in the indoor environment. The most commonly used indoor signal propagation models include free space propagation model, two-path mode and logarithmic distance path loss model.
Free Space Propagation Model
Logarithmic Distance Path Loss Model
In actual indoor environment, the signal propagation is affected by noise, multi-path, signal reflection, signal diffraction, NLOS propagation and other factors. For example, RSSI measured at different times at one location will fluctuate within a certain range. In order to show the indoor signal propagation characteristics more precisely, we usually apply logarithmic distance path loss model. The signal propagation can be expressed as:
0
0
10 lg d
p p n
d
= +
(1)
0
d represents the reference distance, p0represents the received signal strength when the distance is
0
d , n represents the environmental impact factors, indicating the growth rate of the pass loss with
distance, depending on the particular environment. d represents the distance between nodes.
The model is an empirical model, which is more applicable to the actual indoor environment.
Trilateral Positioning
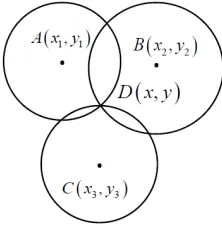
[image:2.612.249.360.369.483.2]Trilateral positioning is a range-based algorithm. Firstly, we measure the RSSI between target node and anchor node, and then convert the RSSI to the distance according to the indoor signal propagation model. In general, the number of anchor nodes nearby is more than three. Next, we can get the equation of the relationship between target node and anchor nodes. Finally, the location of the target node can be calculated according to the equation [5]. The relationship is shown in Figure 1.
Figure 1. The relationship between target node and anchor nodes.
The mathematical description of the algorithm is shown below: Assuming coordinates of target node is D x y
(
,)
, anchor nodes are(
x y1, 1)
,(
x y2, 2)
,(
x y3, 3)
, the distance between target node andanchor nodes are d1,d2,d3,then the relationship can be expressed as:
(
)
(
)
(
)
(
)
(
)
(
)
2 2 2
1 1 1
2 2 2
2 2 2
2 2 2
3 3 3
x x y y d
x x y y d
x x y y d
− + − =
− + − =
− + − =
(2)
According the Eq. 2, we can get the Eq. 3 and Eq. 4.
(
)
(
)
2 2 2 2 2 21 3 1 3 1 3 1 3 3 1
2x x −x +2y y −y =x −x +y −y +d −d (3)
(
)
(
)
2 2 2 2 2 22 3 2 3 2 3 2 3 3 2
1 2 2 2 2 2 2 1 3 1 3 3 1 1 3 1 3
2 2 2 2 2 2 2 3 2 3 2 3 2 3 3 2
=2 x x y y x x y y d d
x
x x y y
y x x y y d d
− − + − + − − − − − − + − + − (5)
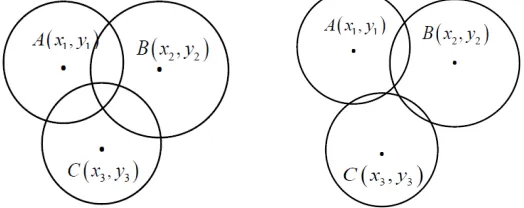
In an ideal environment, trilateral positioning has advantages of high precision, small errors, low complexity, which is an ideal positioning algorithm. However, in actual indoor environment, the indoor environment is complex and signal fluctuations within a certain range, which will introduce the error of distance between target node and anchor nodes. The existence of the error will lead to three circles not intersecting at one point, shown in Figure 2.
[image:3.612.177.439.181.285.2]
Figure 2. The situation where the circles not intersecting at one point.
In this situation, we cannot get the location of the target node.
Taylor Series Expansion Positioning Algorithm
Taylor series expansion positioning algorithm is proposed by W.H.Foy, based on the Taylor principle of least squares estimation recursive algorithm. The basic principle is: Assuming real coordinate of
target node is
(
x y,)
, by transferring Eq. 2, we can get Eq. 6.(
)
2(
)
2i i i
d = x −x + y −y ,i=1, 2,,n (6)
Assuming the estimated coordinate of target node is
(
x y,)
, so we can get the following equations.x= + ∆x x,y= y+ ∆y (7)
(
,)
(
,)
f x y = f x+ ∆x y+ ∆y (8)
After Taylor series expansion in
(
x y,)
of Eq. 8, we can get Eq. 9.(
,)
=(
,)
f x y(
,)
f x y(
,)
f x x y y f x y x y
x y ∂ ∂ + ∆ + ∆ + ∆ + ∆ + ∂ ∂ (9)
Remove the high-order partial derivatives and let:
(
,)
= i
i
f x y x x
x r ∂ − − ∂ ,
(
,)
= i if x y y y
y r ∂ − − ∂ ,
(
)
(
)
2 2, 1, 2,
i i i
r= x −x + y −y i= n
The Eq. 9 can be represented as:
i i
i i
i i
x x y y
d d x y
r r − − − = ∆ + ∆ (10) Let:
i i i
d d d
The Eq. 10 can be represented as :
i xi yi
d a x a y
∆ = ∆ + ∆ ,i=1, 2,n (11)
Let: 1 2 3 n d d d d d ∆ ∆ ∆ = ∆ ∆ , 1 1 2 2 3 3 y x x y y x xn yn a a a a
A a a
a a = , x y ρ ∆ ∆ =
∆
According to the least square solution, the result can be represented as:
(
T)
1 TA A A d
ρ −
∆ = ∆ (12)
Then we can calculate the coordinate of the target node.
Taylor series expansion positioning algorithm is sensitive to the initial value. The improper initial value will cause Taylor series not converging and result in the positioning failure. Therefore, we should find an algorithm to provide initial value for the Taylor series expansion. Currently, commonly used algorithms to provide initial value include Chan's algorithm and centroid location algorithm [6], however, Chan's algorithm has a high complexity and centroid location algorithm is vulnerable to environmental impact.
Co-Location Algorithm Based on Trilateral Positioning and Taylor Series Expansion
To solve the problem of low positioning accuracy of trilateral positioning and being sensitive to the initial value of Taylor series expansion, the paper proposes a Co-Location algorithm based on trilateral positioning and Taylor series expansion. Because the trilateral positioning has error, the circle calculated by the distance cannot intersect at one point, so we can make use of it. The algorithm steps are as follows:
Step1. Setting the locations of anchor nodes
(
x y1, 1)
,(
x y2, 2)
,,(
x yn, n)
Step2. Measuring the RSSI between target node and anchor nodes.Step3. According to the indoor signal propagation model, transferring the RSSI into the distance between target node and anchor nodes.
Step4. Calculating the irregular region where the target is according to the distance and the coordinates of the anchor nodes by using trilateral positioning algorithm.
Step5. Calculating the centroid of the irregular region.
Step6. Calculating the coordinate of the target node by performing Taylor series expansion using the centroid of the irregular region as the initial value of the Taylor series expansion.
Test Results
Actual Indoor Environment Signal Propagation Model
[image:5.612.214.396.147.296.2]In the indoor positioning system, we get the curve between RSSI and distance by repeatedly measuring the RSSI of the same iBeacon at different location. After least squares fitting the curve is shown in Figure 3. From Figure 3, we can know that it matches the logarithmic distance path loss model.
Figure 3. The signal propagation model.
Indoor Signal Intensity Distribution
[image:5.612.99.506.415.568.2]Due to the movement of people and objects, the indoor environment is complex, so at a fixed location the RSSI is uncertain and fluctuates within a certain range. In order to reduce the error caused by the signal fluctuations, we build the statistical model of the RSSI. After hundreds of measurements, the statistical model is shown in Figure 4.From Figure 4, we can know that the model obeys Gaussian distribution, so we can select the mean of the model as the RSSI of this location.
Figure 4. Distribution of RSSI at a certain point. Figure 5. The cumulative distribution function of the positioning error.
Performance of Co-Location Algorithm and Trilateral Positioning Algorithm
Summary
In order to solve the problem of low positioning accuracy of trilateral positioning and being sensitive to the initial value of Taylor series expansion, the paper firstly proposes a Co-Location algorithm. Then, the paper builds an actual indoor positioning system to verify the performance of the Co-Location algorithm. The experimental results show that compared to the trilateral positioning algorithm, co-location algorithm improves indoor positioning accuracy and reduces errors in complex indoor environment in spite of increasing a little complexity, so the co-location algorithm is suitable to the actual indoor positioning.
Acknowledgement
This research was financially supported by the National Development and Reform Commission (NDRC) Project (2014-2328), National Great Science Specific Project (Grants No. 2014ZX03002002-004) and National Natural Science Foundation of China (Grants No. NSFC-61471067).
References
[1] Yan K, Zhou H, Xiao H, et al. Current status of indoor positioning system based on visible
light[J]. 2015:565-569.
[2] Deng Zhongliang, YU Yanpei, Yuan Xie, et al. Situation and Development Tendency of Indoor
Positioning[J]. China Communications, 2013, 10(3):42-55.
[3] Shi S, Sun H, Song Y. Design of an experimental indoor position system based on RSSI[C]//
International Conference on Information Science and Engineering. IEEE, 2010:1989-1992.
[4] Liang-Fu P, Qin-Zhen H, Yun-Song L. A cooperative localization method based on conjugate
gradient and Taylor series expansion algorithms[C]// Computer Science and Network Technology (ICCSNT), 2011 International Conference on. IEEE, 2011:1108-1112.
[5] Z. G. Jun, L. Xin, X. Z. Long, et al. Weighted Least Square Localization Algorithm Based on
RSSI Values[C]// Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control. IEEE, 2015.
[6] Li J, Li Z, Wang Q, et al. An Ellipse-Centroid Localization Algorithm in Wireless Sensor
Networks[C]// Wireless Communications, Networking and Mobile Computing, 2009. WiCom '09. 5th International Conference on. 2009:1 – 4.
[7] Zhu J, Luo H, Chen Z, et al. RSSI based Bluetooth low energy indoor positioning[C]//
International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2014.
[8] Gulmezoglu B, Guldogan M B, Gezici S. Multiperson Tracking With a Network of