Geometry and mechanics of non-Euclidean thin
sheets.
PACAM XV May 20, 2015
Shankar Venkataramani
Eran Sharon
John Gemmer
Images courtesy Eran Sharon and John Gemmer
Morphology: growth and plastic deformation
Shaping Thin Elastic Sheets
Shaping Thin Elastic Sheets
The observed curvature of the arcs when they are flattened is called the geodesic curvature along these lines— another property controlled by their metric. An important observation is that the geodesic curvature along the edges of the wavy leaf in Figure 8 is nearly constant. We do not see any big variations in this curvature that are correlated either with the vein struc-ture or with the waviness of the leaf. The tissue along the edge grew nearly uniformly, the growth law was uni-form, and the leaf grew as a simple leaf. Like the plastic sheets, it should have been a simple featureless leaf, but because of the geometrical limitations of space, it was forced to break the symmetry and to adopt a wavy shape.
Wrapping Up
Flowers, like leaves, form complex buckled shapes. Geometrically, the main difference between the two is that
leaves form essentially from long, free-standing strips, whereas flowers have more complex geometries; the central tube of a daffodil, for example, closes on itself like a cylinder. What happens to such a cylinder or tube when we ap-ply to it a metric that increases toward its edge? Just as the leaf grows from the center, we can think about “growing” such cylinders starting from a ring of cells and adding rings on top of one another. If the rings all have the same number of cells, they will have the same diameter and will form a cylin-der. However, as the number of cells that form a ring grows exponentially upward, the metric of the cylinder in-creases also, leading to an increasing diameter of the cylinder in its upper part and to a trumpet-like shape.
As the metric of the flower increases, the edge of the flower splays outward more and more. Eventually, it splays out so much that the edge of the flower
is perpendicular to the direction of the stem along which it is growing. It forms a circle with a radius we’ll call R. That marks the end of this phase of flower growth. If cells continue to at-tach to the end of the flower, causing the metric to grow at an ever-steeper rate as the flower grows sideways, the perimeter of the edge will have to be longer than 2πR. This is known to be
impossible in our Euclidean space without breaking the axial symmetry. The edge of the flower must buckle.
In Figure 9a we show the result of an experimental study using thin tubes made of polyacrylamide gel. This gel changes its volume depending on its environment. It swells in water, but shrinks in acetone. We used this proper-ty to change the metric of the tube. First, we dipped the tube in acetone, causing it to shrink uniformly. Next we dipped one end of the tube in water, allowing the water to diffuse into the tube. As a
2004 May–June 259 www.americanscientist.org
© 2004 Sigma Xi, The Scientific Research Society. Reproduction with permission only. Contact [email protected].
Figure 7. Can a leaf that is normally flat be induced to become wavy? Here the growth hormone auxin is applied to the edge of a normally flat leaf from an eggplant, causing enhanced growth only near its margins. This growth imposes a negative Gaussian curvature on the leaf, simi-lar to that in the torn plastic sheets in Figures 5 and 6. After 10 days of such a treatment, waves have developed; at 12 and 14 days the waves have grown bigger, and waves within waves become discernible. (Photographs courtesy of the authors.)
after 12 days after 14 days
before after 10 days
Experimental observations:
Refinement with decreasing thickness
Halftone Gel Lithography
Controlled reversible shaping
Kim, Jungwook, et al. "Designing responsive buckled surfaces by halftone gel lithography."
Science 335.6073 (2012): 1201-1205.
of Ω(r) at each lattice point according to Eqs. 3 and 4, determining the corresponding value of
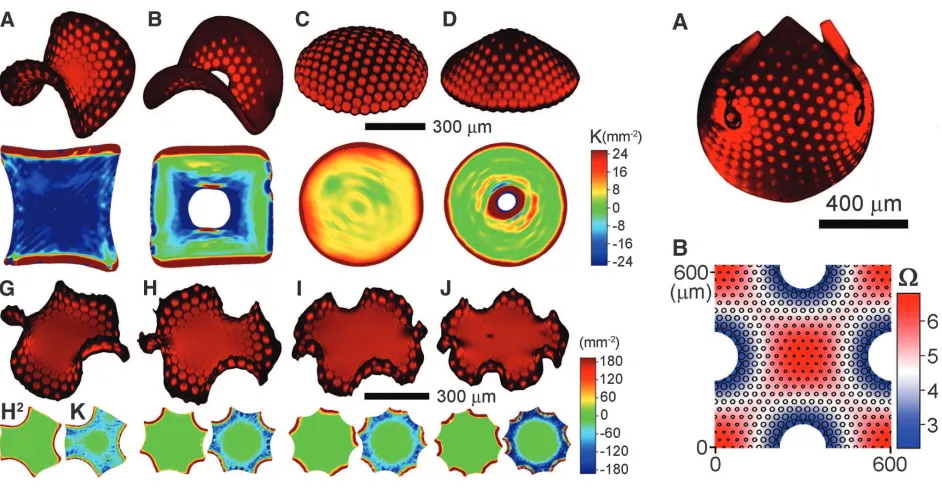
flow from the fit of Eq. 2 to the data in Fig. 1H, and finally setting the size of the dot at that lattice point according to Eq. 1. Because the power-law metrics in Eq. 3 diverge or vanish at the origin, it is necessary to cut out a small re-gion around the center of each of the two cones. The shapes adopted by the corresponding gel sheets (Fig. 2, A to D) are measured by laser scan-ning confocal fluorescence microscopy (LSCM) and analyzed as described in the SOM. Each of the four surfaces shows only small deviations about an average Gaussian curvature, with the exception of the regions near the free edges, where our analysis yields artifactual curvatures (due to the finite thickness of the gel sheets, the surface meshing procedure used yields addition-al points on the edges that do not accurately reflect the 2D geometries of the sheets). After excluding regions of the surface within 2h of the edges to avoid these artifacts, we find the aver-age Gaussian curvatures of the spherical cap and saddle to be 6.2 mm−2 and –20.6 mm−2, respec-tively, with nearly axisymmetric distributions of curvature (fig. S2A). Both values are in rea-sonable agreement with the target values, al-though the tendency of disks with uniform dot sizes to show slight curvatures (with radii of 2 mm) suggests the presence of slight through-thickness variations in swelling (see SOM for details) that may contribute to the observed de-viations from the programmed curvature. Inter-estingly, we do not observe a boundary layer with negative Gaussian curvature around the edge of the spherical cap as has been reported
for truly smooth metrics (17, 18), possibly re-flecting the influence of the through-thickness variations in swelling. For both cones, the av-erage Gaussian curvatures, excluding regions at the free edges, are close to zero. Further, Fig. 2E shows a plot of the deficit angle d measured for five different cone metrics with power law ex-ponents −1 ≤ b < 0, which agrees closely with the programmed value d = −pb.
We next consider metrics of the form
WðrÞ ¼ c½1 þ ðr=RÞ2ðn−1Þ&2 ð5Þ
corresponding to Enneper’s minimal surfaces with n nodes. These surfaces all have zero mean curvature and so are expected to minimize the elastic energy for these metrics at vanishing thickness (18). Although Eq. 5 is axisymmetric, Enneper's surfaces spontaneously break axial symmetry by forming n wrinkles. In Fig. 2, G to J, we demonstrate patterned surfaces with n = 3 to 6, each of which reproduces the targeted number of wrinkles. As shown in the maps of curvature in Fig. 2 (and azimuthally averaged plots in fig. S2B), each surface has small mean curvature and negative Gaussian curvature that matches closely with the target profile. For a given film thickness, increasing n eventually leads to a saturation in the number of wrinkles, because the bending energy arising from Gaussian curvature increases with n (for the films with
h ≈ 7 mm in Fig. 4, a metric with n = 8 yielded only six wrinkles). However, given the subtle differences between the metrics plotted in Fig. 2F, the ability to accurately reproduce the pro-grammed number of wrinkles for n = 3 to 6 is a
strong testament to the fidelity of the metrics patterned by this technique.
The true power of our approach lies in the fabrication of nonaxisymmetric swelling pat-terns. As a simple demonstration, we first con-sider the problem of how to form a sphere through growth. For the axisymmetric metric described in Eq. 4, the maximum value of r/R
to which this metric can be experimentally pat-terned is restricted by the accessible range of swelling. In our case, this range is Ωhigh/Ωlow ≈
3.7, limiting the maximum portion of a sphere that can be obtained to slightly less than half. Although further improvements in the material system are likely to increase the available range, the axisymmetric metric is inherently an ineffi-cient way to form a sphere, because as one seeks to go beyond a hemisphere and toward a closed shape, the required swelling contrast diverges rapidly. Given access to 2D metrics, however, a number of well-established conformal mappings of the sphere onto flat surfaces are known from the field of map projections. For example, the Peirce quincuncial projection (27) maps a sphere of radius R onto a square using the metric
Wðx;yÞ ¼ 2j
dn xþRiyjp1ffiffi2
" #
sn xþRiyjp1ffiffi2
" #
j2
1 þ jcn xþRiyjp1ffiffi2 " #
j2
h i2 ð6Þ
where sn, cn, and dn are Jacobi elliptic func-tions, and x and y are the components of r. This metric still has four cusp-like singularities where Ω(r) = 0; however, one of its useful properties as a map projection is that only a small portion
Fig. 2. Halftoned disks with axisymmetric met-rics. Patterned sheets pro-grammed to generate (A) a piece of saddle surface (Sa), (B) a cone with an excess angle (Ce), (C) a spherical cap (Sp), and (D) a cone with a deficit angle (Cd). (Top) 3D re-constructed images of swollen hydrogel sheets and (bottom) top-view surface plots of Gaussian curvature. Initial thick-nesses and disk diame-ters are 9 and 390 mm, respectively, although the apparent thickness of sheets is enlarged due to the resolution of the LSCM. (E) Measured val-ues of deficit angle d
for cones with five
dif-ferent exponents b (see Eq. 3) (black solid circles) and the programmed values (blue dashed line). (F) Swelling factors for the target metrics as a function of normalized radial position on the unswelled disks r/R, with points plotted at values corresponding to lattice points to indicate the resolu-tion with which Ω is patterned. (G to J) Patterned sheets programmed to
generate Enneper’s minimal surfaces with n = (G) 3, (H) 4, (I) 5, and (J) 6 wrinkles upon swelling as dictated by Eq. 5. 3D reconstructed images (top) and top-view surface plots of squared mean curvature H2 and Gaussian curvature K (bottom). Initial thicknesses and disk diameters are 7 and 390 mm, respectively.
www.sciencemag.org SCIENCE VOL 335 9 MARCH 2012
1203
REPORTS
on September 6, 2012
www.sciencemag.org
Downloaded from
of the area of the sphere requires large
distor-tions. Thus, we can approximate the metric by
excising the small regions of the square where
Ω
falls below the experimentally accessible range,
as shown in Fig. 3B. The resulting swelled shape
(Fig. 3A) does indeed approximate that of a
sphere (see fig. S3 for plots of surface curvatures)
with four small regions removed, although the
four corners of the square do not quite close.
The reason for the latter behavior remains under
investigation but may arise from the excised
singularities and/or the finite bending energy of
the sheet. Nonetheless, the contrast between the
nearly closed shape achieved in Fig. 3A and the
limited spherical caps that may be obtained for
the same material system with an axisymmetric
metric highlights the importance of 2D
pattern-ing, even for generating axisymmetric shapes.
Beyond fabricating simple shapes with
con-stant target Gaussian curvature, our approach
opens the door to shapes of arbitrary
complex-ity. Although numerous fundamental questions
and practical challenges remain to establishing
the necessary design rules, we take a first step
toward the construction of shapes whose
swell-ing factors are not known a priori by
consid-ering a corrugated surface (Fig. 3C) described
by the height function
H
(
x
,
y
) =
H
0[cos(2
p
x
/
L
) +
cos(
p
x
/
L
+
√
3
p
y
/
L
)], where 2
L
is the width of
the sheet. We choose
H
0= 60
m
m and
L
= 300
m
m. Determining an appropriate swelling factor
is equivalent to finding a conformal coordinate
system on the surface (as described in the SOM)
and yields the swelling function shown in Fig.
3H. This example highlights some of the
re-maining challenges in designing arbitrary 3D
shapes, because sheets patterned according to
Fig. 3H often fail to form the desired shape upon
swelling. The three local maxima in growth,
lying along the line cutting diagonally through
the center of the sheet, each represent regions
of positive target Gaussian curvature; however,
each may achieve its desired local curvature by
buckling either upward or downward. Indeed,
rather than buckling in the manner described by
H
(
x
,
y
), these local maxima in swelling may
instead all buckle in the same direction, as shown
in Fig. 3G (again, possibly reflecting a preference
for buckling in one direction due to slight
through-thickness variations in swelling).
How-ever, in some cases, the sheets do swell into the
corrugated conformation shown in Fig. 3E, which
is very similar to the programmed surface
H
(
x
,
y
),
as can also be seen by comparing the targeted
(Fig. 3D) and measured (Fig. 3F) Gaussian
cur-vatures. The use of a glass micropipette to hold
the patterned sheet against the substrate during
swelling (upon cooling from 40° to 22°C) tends
to constrain the sheet to swell into the corrugated
shape, and initially misfolded sheets can also be
“
snapped through
”
into the desired
configura-tion by applicaconfigura-tion of force to the center-most
region of positive curvature. Thus, we conclude
that such surfaces with complex swelling
pat-terns may in general form multiple different shapes
that are locally metastable and that additional
constraints may therefore be required to ensure
that a specific shape is chosen.
Finally, we demonstrate the responsiveness
of the patterned sheets to changes in temperature
using another nonaxisymmetric metric that
com-bines that for an Enneper
’
s surface with four
Fig. 3.
Nonaxisymmetric swelling patterns. (
A
) A 3D reconstructed image of
the nearly closed spherical shape formed by the metric of Eq. 6 and shown in
(
B
); the sizes and positions of open circles correspond to those of the
low-swelling dots. Before low-swelling, the patterned gel sheet was 9
m
m thick, with
lateral dimensions of 600 by 620
m
m. (
C
) The target height profile of the
corrugated surface, also shown in (
D
) top view. The grid represents the
co-ordinate lines of the conformal coco-ordinate system. (
E
) 3D reconstructed image
and (
F
) Gaussian curvature of the sheet swollen into a shape similar to the
target surface. (
G
) 3D reconstructed image of the shape adopted when each of
the three regions of positive curvature along the center diagonal buckle in the
same direction. (
H
) The swelling pattern used to generate sheets in (E) to (G).
The sizes and positions of open circles correspond to those of the low-swelling
dots. Before swelling, the patterned gel sheets were 9
m
m thick and had
lateral dimensions of 600 by 580
m
m.
Fig. 4.
Thermal
actua-tion of patterned sheets.
(
A
) When the
tempera-ture of the aqueous
me-dium is increased, the
hybrid Enneper
’
s surface
deswells and recovers its
flat shape by 49°C. (
B
)
Upon lowering the
tem-perature to 22°C, the disk
swells back to the initial
hybrid shape through a
different pathway. Initial
thickness and disk
diam-eter are 7 and 390
m
m,
respectively.
9 MARCH 2012 VOL 335
SCIENCE
www.sciencemag.org
1204
REPORTS
on September 6, 2012
www.sciencemag.org
x
y
u
v
w
Φ
Elastic energy of a thin sheet
E
=
!
∥
γ
∥
2
+
ϵ
2
∥
κ
∥
2
κ
= ˆ
n
·
D
2
Φ
γ
= (
D
Φ
)
T
·
D
Φ
−
g
Stretching energy
Bending energy
Modeling Assumptions
•
The observed configuration is a minimizer for the elastic energy.
E
=
!
∥
γ
∥
2
+
ϵ
2
∥
κ
∥
2
•
If there exist smooth configurations with
= 0 (Isometric immersions),
then the configuration of the elastic sheet should converge to this limit as
the thickness is reduced.
•
Conversely, if the Bending content
B
=
R
⇥
⇥
⇥
2
diverges as
0, there
do not exist
smooth isometric immersions for the given metric
g
.
•
Experimental sheets are sufficiently thin that they are described by the
✏
0 asymptotics.
•
The small slopes (F¨oppl von K´arm´an) approximation adequately captures
all the important features of the system.
Experimental observations:
Refinement with decreasing thickness
N
(
p
)
·
d
r
(
p
) = 0
I
≡
ds
2
=
d
r
(
p
)
·
d
r
(
p
)
Geometry: The Gauss Normal map
p
The first fundamental form
I
determines the (symmetric)
metric tensor
g
The second fundamental form
I I
determines the (symmetric)
curvature tensor
κ
Gauss Curvature:
K
= det(
g
−
1
κ
)
Geometry of surfaces in one slide :
Gauss’
Theorema Egregium
:
g
determines
K
.
Hyperbolic surface :
K <
0
.
Hyperbolic Monge Ampere equations
n
= (
w
x
, w
y
,
1)
N
=
k
n
n
k
.
dA
= (w
xx
w
yy
w
xy
2
)dx
^
dy
.
d
=
k
dA
n
k
4dp
^
dq
=
K
F vK
(
x, y
)
dx
^
dy
.
dp
^
dq
=
K
k
(
n
x,y
k
4)
dx
^
dy
For any domain on which the normal map is one-to-one, the area of the
spherical image cannot exceed 2
⇡
. No such restriction for the planar image.
When
K <
0, these are Hyperbolic Monge-Ampere equations.
Geodesics and Asymptotic lines: C
2
surfaces
Negatively curved sheets: Disk geometry
Small slopes approximation:
det(
⇥⇥
w) = 1
Solutions:
w
=
1
2
⇣
ax
2
y
a
2⌘
.
w
= 0 for
y
=
±
ax. Pick
a
= cot(
/n).
Theorem:(J. Gemmer, SV).
D
is the unit disk with a metric whose FvK
curvature is
1. For all
n
2
N
, we have a
n
-periodic local minimizer for the
elastic energy, whose energy satisfies the bounds
No refinement with thickness!
Hyperbolic disks: Full geometry
By allowing non-smooth embeddings, we can decrease the
curvature, and the energy.
4
see Fig. 4(e-f). Note that, if a hyperbolic surface is
C
2, every
point is locally a (regular) saddle (as in Fig. 4(a)) and
there-fore cannot contain branch points. Non-
C
2immersions are
therefore qualitatively di
↵
erent from
C
2immersions in that
they admit 3-saddles (“monkey saddles”) and higher order
saddles, which can mediate a local refinement of the buckling
wavelength (See Fig. 5).
FIG. 4. (a-b) Small slope isometric immersions
w
04
(x
1,
x
2) and
w
04(
x
1,
x
2) for constant Gaussian curvature
K
=
1.
w
04(x
1,
x
2) is
con-structed by taking odd periodic reflections of the piece of
w
04
(
x
1,
x
2)
bounded between the green lines. The mesh on both of these
sur-faces correspond to their asymptotic lines. (c-d) Projection of the
asymptotic lines of
w
04
(x
1,
x
2) and
w
04(
x
1,
x
2) onto the
x
1,
x
2plane.
(e-f) Direction of the gradient
r
w
along circles centered at the
ori-gin. The regular saddle in (a) corresponds to a gradient field with
winding number -1, so the gradient map is 1 to 1. The 4-saddle in (b)
has winding number -3, so the gradient map is a 3 sheeted covering
near the origin.
Multiple branch points can be introduced on the surface by
replicating the above process at any point, not just the origin.
For example, consider the surface
w
02(
x
1,
x
2)
=
x
1x
2which is
ruled by the asymptotic lines
x
1,
x
2=
const. A branch point
can be added at (
x
1,
x
2)
=
(1
/
p
2
,
1
/
p
2) by removing the
sec-tor
x
1,
x
21
/
p
2 and in this region fitting three rotated and
translated copies of
w
06(
x
1,
x
2)
=
x
2(
x
1p
3
x
2) so that the
resulting surface has continuous partial derivatives across the
cut; see Fig 5(a). Three more branch points
b
2,1,
b
2,2,
b
2,3at a radial distance of 1
/
4 from
b
1,1can be added along rays
emanating from
b
1,1that bisect the lines of inflection; see Fig
5(b). This construction can be continued so that at the
n
-th
it-eration 3
nnew branch points are added at a radial distance of
(1
/
2)
nfrom the previous branch points. The surface
w
(
x
1,
x
2)
formed in the limit
n
! 1
is a fractal with an infinite number
of subwrinkles in the region
x
10
,
x
20
,
x
21+
x
221, and
it satisfies [
w
,
w
]
=
1. The solution can be extended by odd
periodic reflections to give a small-slopes isometric
immer-sion of the unit disk with
K
=
1. To illustrate the wrinkling
behavior near the edge we map
w
to a strip geometry through
a conformal map
h
[
x
+
iy
]
=
w
[
e
x+iy]; see Figs. 5(c-d).
FIG. 5. Finite bending energy solutions to the Monge-Ampere
equa-tion [w
0,
w
0]
=
1. (a) Three subwrinkle solution created by
insert-ing three rotated and translated copies of the solution
w
06
(
x
1,
x
2)
=
x
2(x
1p
3
x
2) onto the solution
w
02(x
1,
x
2)
=
x
1x
2at a branch point.
(b) Nine subwrinkle solution created by inserting nine copies of
w
012
(x
1,
x
2)
=
x
2(
x
1(2
+
p
3)x
2) at three branch points added onto
the three subwrinkle solution. (c) Extension of the nine subwrinkle
solution to the full circular domain. (d) The nine subwrinkle solution
mapped to the strip geometry by a conformal map.
The existence of self-similar isometric immersions has
im-plications to the modeling of non-Euclidean elastic sheets.
As for the strip with
=
1, the solution
w
02(
x
1,
x
2) is
har-monic yet the extension of
w
02(
x
1,
x
2) to an exact
isomet-ric immersion has divergent bending energy for
R
'
1
.
25
with the bending content concentrated near the singular point
x
1=
x
2⇡
1
.
25
/
p
2 [22]. We can isometrically immerse disks
with larger
R
by a global refinement of the wavelength i.e
taking
n
>
2. These solutions increase the bending energy
globally. An energetically favorable alternative might be to
introduce a branch point in the
n
=
2 solution near the
singu-lar point, and locally refining the wavelength instead. Indeed,
numerics for
=
1
/
3 in the strip geometry indicate that, even
within the small slopes approximation, localized self similar
wrinkling profiles may be energetically preferred over global
refinement of the wavelength [2, 23].
Crumpled sheets have an energy scale
t
5/3which is
inter-mediate between the stretching and bending energies [32, 33].
In contrast, the existence of
W
2,2isometric immersions for
5 10 15 20 5
10 15 20
5 10 15 20
5 10 15 20
Self-similar branching
Branch points
Curvature determined by
Ongoing work
•
Understand the role of these non-C
2
solutions in
physically observed patterns
•
Rigidity/flexibility in solutions of nonlinear hyperbolic
equations
•
Discretize this construction.
References:
1. Gemmer, J. A. & Venkataramani, S. C. Shape selection in non-Euclidean plates. Physica D:
Nonlinear Phenomena 240, 1536–1552 (2011).
2. Klein, Y., Venkataramani, S. & Sharon, E. Experimental Study of Shape Transitions and
Energy Scaling in Thin Non-Euclidean Plates. Phys. Rev. Lett. 106, 118303 (11 Mar. 2011).
3. Gemmer, J. A. & Venkataramani, S. C. Defects and boundary layers in non-Euclidean plates.
Nonlinearity 25, 3553–3581 (2012).
4. Gemmer, J. A. & Venkataramani, S. C. Shape transitions in hyperbolic non-Euclidean plates.
Soft Matter 9, 8151–8161 (2013).
5. Gemmer, J. A., Sharon, E. & Venkataramani, S. C. Isometric immersions and self-similar
buckling in Non-Euclidean elastic sheets, in review, Phys. Rev Lett., arXiv:1504.00738
(2015).

![FIG. 5. Finite bending energy solutions to the Monge-Ampere equa-tion [w0 w0]1. (a) Three subwrinkle solution created by insert-](https://thumb-us.123doks.com/thumbv2/123dok_us/270724.2023632/20.1024.52.1016.118.740/finite-bending-energy-solutions-ampere-subwrinkle-solution-created.webp)
