Autoregressive Tree
Models for Time-Series
Analysis
C. Meek, D.M. Chickering, and D. Heckerman
1 Introduction
Theanalysisand modelingof time-seriesdataisanimportantareaofresearchfor
many communities. In this paper, our goal is to identify models for
continuous-valued time-series data that are useful for data mining in that they (1) can be
learned eÆciently from data, (2) support accurate predictions, and (3) are easy
to interpret. To these ends, wedescribean interpretableclass of models that we
callAutoRegressiveTreemodels,orARTmodels,thatareageneralizationof
stan-dardautoregressive(AR)models. We describelearningmethods forART models
andcomparethesemethodstothoseforalternativemodels. Ourexperiments,
per-formedon2,494time-seriesdatasetsfromtheInternationalInstituteofForecasters,
demonstratethatARTmodelsprovidesuperiorpredictiveaccuracy. Weconcentrate
on the problem of modeling the evolutionof valuesof a continuous variable over
time;thatis,wemodelaunivariatetimeseries. Thegeneralizationtomultivariate
time-seriesanalysisisstraightforwardandisdiscussedinSection6.
Roughlyspeaking,weconstructARTmodelsasfollows. First,weusea
stan-dard\windowing"transformationofatime-seriesdatasetintoasetofcasessuitable
for aregressionanalysis,where the \predictorvariables"and \targetvariable" in
theanalysis correspondto thepreceding valuesand currentvalue, respectively, in
thetimeseries. Thistransformationisoftenusedwhenconstructingautoregressive
models. Then,weusethetransformeddatasettolearnadecisiontreeforthetarget
variable. This decisiontree has linearregressionsat its leaves,thus, producing a
piecewise-linearauto-regressionmodel. We useaBayesiantechniqueto learnthe
structureandparametersof thedecisiontree.
Although there has been much research on learningdecision trees with
lin-ear regressionsat the leaves (see Section 2), we know of no other work in which
these models have been applied to time-series analysis. In addition, our work is
distinguishedfrompreviousworkinthatwe(1)useaBayesianapproachformodel
selection, and (2) demonstrate that our approach (which incorporates the ART
model)producespredictionsthataremoreaccuratethanotherapproachessuitable
fordatamining.
2 Autoregressive Trees
Inthissection,wedescribeaclassofmodelscalledautoregressivetree(ART)models
aswellasseveralothertypesofmodels,somecloselyrelatedtoARTmodels.
Webeginby introducing notationandnomenclature. Wedenoteatemporal
sequence of variables by Y = (Y 1 ;Y 2 ;:::;Y T
). Time-series data is asequence of
valuesforthesevariablesdenoted byy=(y
1 ;y
2 ;:::;y
T
). Inthispaper,werestrict
considerationto time series models that are probabilistic, stationary, and p-order
Markov(p0). That is,weconcentrateonmodelsoftheform
p(y t jy 1 ;:::;y t 1 ;)=f(y t jy t p ;:::;y t 1 ;); p<tT (1)
wheref(j;)isafamilyofconditionalprobabilitydistributionsthatrepresentsthe
functionalform ofthemodel and arethemodel parameters. Stationaritymeans
that the dependence of y
t
on the preceding variables doesnot change with time.
The p-order Markov assumption means that, given the previous p observations,
y
t
is independent of theremaining previousobservations. Note that thefunction
f(y t jy t p ;:::;y t 1
;)isoftencalledaregressionwhereY
t
isthetargetvariableand
(Y
t p ;:::;Y
t 1
)aretheregressorvariables.
2.1 ART Models
Themostcommontypeofmodelusedfortime-seriesanalysis isthelinear
autore-gressive(AR) model (e.g., [9]). Alinear autoregressive model of lengthp, denoted
AR(p),isdescribedbyEquation1inwhichf(y
t jy t p ;:::;y t 1 ;)isalinear regres-sion: f(y t jy t p ;:::;y t 1 ;)=N(m+ p X j=1 b j y t j ; 2 ) (2) where N(; 2
) is a normal distribution with mean and variance 2 , and = (m;b 1 ;:::;b p ; 2
)arethemodelparameters(e.g.,[6]page55).
Anautoregressivetree(ART)modelisapiecewiselinearautoregressivemodel
inwhichtheboundariesaredenedbyadecisiontree,andtheleavesofthedecision
treecontainlinearautoregressivemodels. Figure1isanexampleofanARTmodel
inwhichtherearethreeregionsdenedusingthevariableY
t 1
andeachleafcontains
anAR(1)modeldescribedbytheequationattheleaf.
Inthis paper, we further specializeto asubset of ART models that wecall
autoregressive tree models of length p, denoted ART(p). An ART(p) model is an
ARTmodelinwhicheachleafofthedecisiontreecontainsanAR(p)model,andthe
f(Y
t
|Y
t-1
) = N(-767 - 1.5 Y
t-1
, (1114)
2
)
Y
t-1
<-337
Y
t-1
< 0
f(Y
t
|Y
t-1
) = N(1.5 - 0.05 Y
t-1
, (168)
2
)
f(Y
i
|Y
t-1
) = N(-101 + 0.09 Y
t-1
,(293)
2
)
false
true
true
false
Figure1. An ARtree.in thetime series. Weconcentrateonthese models so that wecancompare more
directlywithAR models|that is,moreeasily assessthebenetsof allowingfora
piecewiselinearratherthanlinearmodel.
InART(p)models,eachnon-leafnodeinadecisiontreehasassociatedwithit
aBooleanformulathatisafunctionofthepvariablesY
t p ;:::;Y
t 1
. Forexample,
the root node of the ART model in Figure 1 tests whether Y
t 1
< 337. We
associatewitheachedgeinthetreetheformula(thenegationoftheformula)forits
parentnodeifthelabelontheedgeis\true"(\false"). Weassociatewitheachleaf
l
i
anindicatorfunction,
i
,thatreturns1whentheconjunctionofalltheformulas
associatedwiththeedgesalongthepathfromtherootnodetotheleafl
i
aretrue,
and 0 otherwise. Forexample, the indicator function associated with the middle
leafinFigure1returns1when(Y
i 1
< 337)^(Y
i 1
0),and0otherwise. Then,
anART(p)modelisdened byEquation1where
f(y t jy t p ;:::;y t 1 ;)= L Y i=1 f i (y t jy t p ;:::;y t 1 ; i ) i = L Y i=1 N(m i + p X j=1 b ij y t j ; 2 i ) i ; (3)
whereListhenumberofleaves,=(
1 ;:::; L ),and i =(m i ;b i1 ;:::;b ip ; 2 i ),are
themodelparametersforthelinearregressionatleafl
i
, i=1;:::;L.
ART(p) (and ART) models are generalizations of AR models because an
ART(p) model with a decision tree having only asingle leaf is an AR(p) model.
ART(p) models aremorepowerfulthanAR modelsbecausethey canmodel
non-linearrelationshipsintime-seriesdata. Furthermore,ART(p)modelscanrepresent
periodictime-seriesdata. ThisfactfollowsfromtheanalysisbyTong[16]ofafamily
ofpiece-wiselinearmodelsthatareaspecialcaseofARTmodels. Toillustratethe
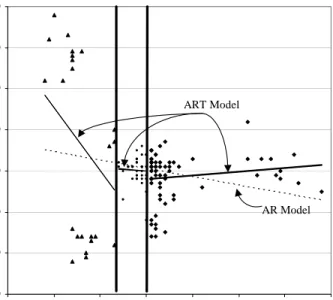
potentialbenetsofanARTmodelascomparedtoanARmodel,considerthetime
series data (one ofthe 2,494 data sets described in Section 4) shown in Figure 2.
Here,thedataisshownasascatterplotofy
t
versusy
t 1
. Alsoshownonthisplot
are AR(1) andART(1) models learnedfrom this data. Wecansee that theART
-1500
-1000
-500
0
500
1000
1500
2000
-1500
-1000
-500
0
500
1000
1500
2000
ART Model
AR Model
C
u
rrent
Value
(Y
t
)
Previous Value (Y
t-1
)
Figure2. Scatterplotof time-seriesdataandAR(1) andART(1)models.
does theAR model. ART models that include additionalpredictor variables can
providefurther benetsoverAR models, although itis diÆcultto illustratethese
benetswithasimple(two-dimensional)gure.
In Section 3, we shall discuss computationally eÆcient methods for
learn-ing ART(p) models from data. In Section 5, we show that the resulting models
yieldaccurateforecasts. Finally,becauseARTmodelsaresimplepiece-wiselinear
predictors, they are easy to interpret. These three properties makeART models
particularlysuitablefordatamining.
2.2 Other Non-linear Autoregressive Models
There are a wide variety of alternative non-linear modeling techniques that have
been applied to time-series analysis (see, e.g.,[8]). In fact,as we describebelow,
onecantransformthetime-seriesproblemintoaregressionproblemandapplyany
non-linearornon-parametricregressiontechnique.
ThemostcloselyrelatedfamiliesofmodelstoARTmodelsaretheself-exciting
threshold autoregressive models (SETAR) of Tong [16] and the adaptive smooth
threshold regressivemodels (ASTAR) of Lewis, Ray, and Stevens [14]. Both the
SETARandASTAR models,aswellasARTmodels, arepiece-wiselinearmodels.
Describedintermsofadecisiontreerepresentation,theSETARmodelsarelimited
to a single split variable. Because of this limitation we do not further consider
ofthewell-knownmultiple adaptiveregressionsplines(MARS)system[7]to
time-series data. ARTmodels areprimarily distinguishedfrom the ASTAR models in
twoways(1)theerrorestimatesforanARTmodel candierbetweeneachofthe
pieces of the piece-wise linear model, and (2) the ART models allow there to be
discontinuitiesbetweenthepiece-wiselinearmodels.
Another common technique for non-linear time-series analysis is the use of
neuralnetworks. Although thesemodelscanlead toreasonablepredictive
perfor-mance, theyare diÆcult to interpret and can be expensiveto learn. Thus, these
modelsarelessusefulfordataminingandwedonotconsider themfurtherin this
paper.
3 Learning and Forecasting with ART Models
Inthissection,weshowhowtolearnthestructureandparametersofARTmodels
from observedtime-series data and how to usean ARTmodelfor forecasting. In
Section3.1,wedescribeageneralBayesianapproachforlearningmodelsfromdata.
InSection3.2,wedescribehowto calculateaBayesianscoreforchoosinganART
modelstructure. InSection3.3,wedescribesearchtechniques thatcanbeused in
conjunctionwithourBayesianscoretoidentify goodmodelsfromdata. Finally,in
Section3.4,wedescribehowtoforecastwithanARTmodel.
3.1 Learning Framework
LetusconsiderageneralBayesianapproachtolearning. Inthisapproach,wehavea
collectionofalternativemodelstructuress
1 ;:::;s
S
havingunknownmodel
param-eters s 1 ;:::; s S
,respectively,andweexpressouruncertaintyaboutthestructure
andparametersbyplacingprobabilitydistributions onthem: p(s)andp(
s js)|we
omitthestructuresubscriptsfromwhenclearfromcontext. WethenuseBayes'
ruleinconjunctionwiththedatadtoinferposteriordistributions overthese
quan-tities: p(sjd)and p(jd;s). Inthemostgeneralcase,wethenmakepredictionsby
averagingoverthese distributions. Thisapproach, however,is typically
computa-tionally intractable. Consequently,weuse aBayesian-modelselectionapproach in
whichwechoosethe structures that hasthe highestposteriorprobability p(sjd),
andmakepredictionsaccordingtop(jd;s)forthat s.
The key quantity in this Bayesian approach is the posterior probability of
model structure p(sjd). By Bayes' rule, this posterior probability is given by
p(sjd) = p(s)p(djs)=p(d). Because p(d) is a constant we can use the
prod-uct p(s)p(djs) to choose the best model. We shall refer to this product as the
Bayesian score for the model. The rst term in this score is simply the
struc-tureprior. Thesecond termp(djs)iscalledthemarginal likelihoodandisequalto
R
p(dj;s) p(js) d, the likelihood of the data p(dj;s) averagedoverthe
uncer-taintyin.
It is interesting to note that, when used for model selection, the marginal
likelihoodbalancesthetofthemodelstructuretodatawiththecomplexityofthe
N islarge,themarginallikelihoodcanbeapproximatedby p(dj ^ s ;s) jj 2 logN where ^ s
isthemaximum-likelihoodestimatorofthedata(see,e.g.,[10])formodel
s. Therstquantityinthisexpressionrepresentsthedegreetowhichthemodelts
thedata,which increasesasthemodelcomplexityincreases. Thesecondquantity,
incontrast,penalizesmodelcomplexity.
Now,letusturntotheapplicationoftheBayesianapproachtolearninga
sta-tionary,p-orderMarkovtime-seriesmodel. AccordingtoEquation1,thelikelihood
ofthedatais p(y p+1 ;:::;y T jy 1 ;:::;y p ;;s)= T Y t=p+1 f(y t jy t p ;:::;y t 1 ;;s) (4)
In this equation, we have included s to emphasize that we are learning model
parameters and model structure. Note that, in writing this likelihood, we have
omittedtherst pobservations, becauseap-order Markovmodel cannotpredict
theseobservations.
Giventhislikelihood,wecanproceedwithlearningasdescribedintheprevious
paragraphs, placing priors on model structures and model parameters and using
Bayes' rule. In the following section, we discuss this approach in detail for the
ARTmodel. Intheremainderofthissection,wedescribeastandard\windowing"
approachin theliteraturethat reducesourproblem tothe problemoflearningan
ordinarylinearregressionmodels(e.g.,[8]).
At the heart of the windowing approach is a transformation of the single
sequence y = (y 1 ;:::;y T ) to a set of cases x 1 ;:::;x T p . The transformation is givenby x i =(x i 1 ;:::;x i p+1 ), for 1<i <T p,where x i j =y i+j 1 . Wecall this
transformeddatasetthelengthptransformationofthetime-seriesdataset. Asan
example,consider thesequence y =(1;3;2;4). Then, thelength-2 transformation
is x 1 = (1;3);x 2 = (3;2);x 3
= (2;4), and the length-3 transformation is x 1
=
(1;2;3);x 2
=(2;3;4).
Giventhistransformation,wecanrewritethelikelihoodofthemodelin
Equa-tion4asfollows: p(y p+1 ;:::;y T jy 1 ;:::;y p ;;s)= T Y t=p+1 f(x t p+1 jx t 1 ;:::;x t p ;;s) (5)
This likelihood is precisely the likelihood for an ordinary regression model with
target variable X
p+1
and regressorvariables X
1 ;:::;X
p
. Thus, wecanlearn
sta-tionary,p-orderMarkovmodeltime-seriesusinganyordinaryregressiontechnique,
includingdecisiontrees.
Finally,wenotethat thisgeneralapproachofBayesianmodelselectionusing
p(sjd) to choose the model structure (including the order of the Markov process
modelshavingdierentvaluesofp,thenumberofproducttermsinthelikelihoodof
Equation5(or Equation4)willvary, makingcomparisonsdiÆcult. Oneapproach
to overcome this complication is to choose a small maximum value p 0
of p for
consideration, and includingonly those termsfor t p 0
in the product. Another
approach is to divide the marginal likelihood of a model by thenumber of cases
usedtocomputethemarginallikelihood. Thelatterapproach,whichweuseinour
experiments,isjustiedbytheprequentialinterpretationofthemarginallikelihood
asdescribedbyDawid[5].
3.2 The Bayesian Score for an ART Model
NowletusconsidertheBayesianscoreforanART(p)model. TofacilitateeÆcient
computation, it is desirableto havemodelscores that canbe computed in closed
form and factor according to the structure of the decision tree (e.g., [2]). It is
thisdesirethat leadsusto makethefollowingtwoassumptions. One,theapriori
likelihoodofamodelstructuresisgivenby
p(s)= jj
where0<1andjjisthenumberofmodelparameters. Inourexperiments,we
useaxedvalue=0:1,avaluewehavefoundtoworkwellformanyotherdomains.
Two, theparameters
1 ;:::;
L
|theparametersassociatedwith theleavesofthe
decisiontree|aremutually independent. Together,theseassumptionsimply
score(s)= L Y i=1 LeafScore(l i ) (6) where LeafScore(l i )= p+2 Z Y x t atl i f i (x t p+1 jx t 1 ;:::;x t p ; i ;s)p( i js)d i (7) wheref i
istheNormaldistributioncorrespondingtothelinearregressionatleafl
i ,
asdescribedinEquation3. LeafScore(l
i
)istheproductof(1)thepriorprobability
oftheleaf-componentofthestructure(therearep+2parametersateachleaf)and
(2)themarginallikelihoodofthedatathatfalls totheleaf.
The remaining ingredientfor the Bayesianscore is the parameter prior. In
thiswork,weusethetraditionalconjugatepriorforalinearregression. Namely,we
assumethat
i
hasanormal-gammaprior(e.g.,[1]). IntheAppendix,wederivethe
formulasforLeafScore(l
i
)giventhisprior. Wenotethatthisscorecanbecomputed
inclosedformandhasacomputationalcomplexityofO(p 3 +p 2 C i ),whereC i isthe
numberofcasesthatfall toleafl
i .
3.3 Searching for ART-Model Structure
Inthissection,wedescribetwoapproachesforlearningthestructureofARTmodels
Therstlearningmethodis forlearningthestructure foranART(p)model when
wearegiven p;the secondmethod isforlearningthestructureforanARTmodel
when weare not given p. Whenwedescribe ourresults in Section 5, we callthe
resultoftherstmethod anARTmodel for known pandtheresultof thesecond
methodanARTmodelfor unknownp. BecauseARmodelsareaspecialcaseofan
ARTmodelwecanalso learnAR models with known pand unknownp. Each of
thesefourmethodsis usedinourexperiments.
Ourmethod forlearninganART model withknown p|thatis, forlearning
thesplitvariablesandsplitvaluesforadecisiontreewhenthepossiblesplitvariables
are limitedto theprevious ptime periods and the leaves containa regressionon
p regressors|is as follows. We use a greedy search algorithm that employs the
operatorsplit-leaf. Theoperatorisappliedtoaleafofadecisiontreeandtakestwo
arguments: avariable to split onand the valueof thevariable. Forinstance, the
decisiontree in Figure 1was obtainedbythe application ofsplit-leaf(Y
i 1 ; 337)
to thesingle leafof an empty decisiontree (the root) followedby theapplication
ofsplit(Y
i 1
;0)to therightchildof thedecisiontreeresultingfromtherstsplit.
Whenapplyingthesplit-leafoperatortoleafl
i
,werestrictattentiontopotentially
splittingonsevenvaluesofeachpredictorvariable;thesevaluesaretheboundaries
of eight equiprobable contiguousregions of anormal distribution estimated from
therestricteddatasetattheleafforthepredictorvariable(see[3]forajustication
of the choice of eight regions). The initial decision tree is a decision tree with a
singleleaf, that is, nosplits. We growadecision treeby iterativelyapplying the
split-leafoperatortoeach leafforeachvariable,andchoosingthesplitthatresults
inthelargest(non-negative) increaseinmodelscore. Ifnosplit onanyleafyields
ahigherscore,thenthesearchisterminated.
Thegreedyprocedureiscomputationallytractable. Recallthatasingle
eval-uation of a split-leaf operator applied to leaf l
i
has computational complexity
O(p 3 +p 2 C i ), where C i
is the number of cases that fall to leaf l
i
. In addition,
foreach leaf,wesearch among ppotential split variablesand search among (e.g.)
k = 8 possible split points. Also, because the splits are binary, the number of
leafnodesthat areevaluatedforexpansionisalwayslessthantwicethenumberof
leavesintheresultingtree. Thus, becauseC
i
<T,theoveralllearningtimegrows
asO(kL(p 4
+p 3
T)),where L isthenumberofleaves. Aswith otherdecision-tree
learningalgorithms,thelearningtimeisafunctionofthesizeofthetree. Typically,
asoneincreasesthesizeofadataset,thesizeofthelearnedtreegrowsandthusthe
timetolearndoesnotnecessarilygrowlinearlyinthesizeofthedataset. Despite
thispotentialsuper-linearscaling,wendempiricallythatdecision-treealgorithms
scalealmost linearlyforlargedatasets.
WelearnanARTmodelwithunknownpbyrepeatedlyusingthemethodfor
learninganARTmodelwithknownp. Inparticular,welearnanART(i)modelfor
each0ip
max
,andchoosethemodelwiththehighestBayesianscore.
3.4 Forecasting with ART Models
Wenowconsider theproblem ofusing ART modelsto forecast. Givenasequence
observationsin thesequence. Wedistinguishbetweentwoimportanttypesof
fore-casting: (1)one-stepforecastingand(2)multi-stepforecasting. Inourevaluationof
predictiveaccuracy,weuseone-stepforecasting.
Inone-stepforecasting,we areinterestedinpredictingy
T+1
giveny
1 ;:::;y
T
areknown. Forthis situation,theposterior distributionforthevariable Y
T+1 isa
function ofasingleleafnode inthe tree. Inparticular, usingthe conjugatepriors
we have described, each leaf in the tree has a conditional t-distribution for this
variable. Inourexperiments,dueto limitationsin ourimplementation, wedonot
usetheappropriatet-distributiontocomputetheselog-likelihoods. Instead,weuse
thenormaldistributionf
i (y t jy t p ;:::;y t 1 ; i
)(describedinEquation3)evaluated
at the value of
i
that is most likely given the data|the maximum a posteriori
(MAP)value: ~ i =argmax Y x t atli f i (x t p+1 jx t 1 ;:::;x t p ; i ;s)p( i js) (8)
Adetailed expressionfor ~
i
isgivenintheAppendix.
Inmulti-step forecasting,weare interestedin predictingvaluesfor variables
atmultiplefuturetimesteps. Whenforecastingmorethanonestepintothefuture,
a simple lookup is not possible due to the non-linearities in the AR tree. For
example,wemayhavetheART modelfrom Figure 1,andwish topredict Y
4 ,Y 5 , and Y 6
when weknow thevalues for onlyY
1 andY
2
. The predictionfor Y
4 does
not correspond to a singleleaf becausewedo not know the valueof Y
3
. Insuch
situations,onecanapplyacomputationallyeÆcientMonteCarloapproachsuchas
forwardorlogicsampling[12]. Inthisapproach,onesamplesy
T+1 giveny 1 ;:::;y T , theny T+2 giveny 1 ;:::;y T+1
,andsoon,usingeithertheappropriatet-distribution
orMAP(normal)distribution. Thesesamplesarethenusedtoestimatequantities
of interest such as the expected values and variances for variables at future time
steps.
4 Evaluation
Inthis section, weprovide anempiricalevaluation ofourmethods and several
al-ternativemethods. Toevaluatethe methods, weuse the2,494 largesttime-series
data sets from the M3 competition available from the International Institute of
Forecasters(http://forecasting.cwru.edu/Data/m3comp/m3comp.html). Thetime
seriesvaryinlengthfrom23to126periodswithboththemedianandmeanlengths
larger than 60periods. The data sets are from avariety of sources including
in-dustrial production data, micro andmacro economic data, and nance data. We
eliminatedatasetssmallerthan23periodstoallowforafaircomparisonwithone
ofthe methods(MARS) which (quitereasonably)couldnotbeapplied tosmaller
datasets.
Foreach ofthe data sets, wecreate nine data sets using thelength p
trans-formation (described in Section 3.1) with p varying from zero to eight. Each of
these transformeddata setsis centeredand standardizedbeforemodeling;that is,
Wedivide each dataset intoatrainingset, usedasinputtothe learningmethod,
andaholdoutset,usedtoevaluatethemodels. Theholdoutsetcontainsthecases
correspondingtothelastveobservationsinthesequence.
Weevaluatethequalityofalearnedmodelbycomputingthesequential
pre-dictivescorefortheholdoutdatasetcorrespondingtothetrainingdatafromwhich
themodel waslearned. The sequentialpredictivescorefor amodelis theaverage
log-likelihoodofthecasesintheholdoutset,wherethelog-likelihoodofacaseisthe
logprobabilitythat themodel assignsto theobservedvalueofthetarget variable
given the observed predictor values. This log-likelihood computation is simply a
one-step forecast. Finally, to evaluate thequality of alearningmethod, we
com-pute the average of the sequential predictivescores for each of the 2,494 learned
modelsproducedbythelearningmethod. Notethattheuseofthelog-likelihoodto
measure performance simultaneouslyevaluates both the accuracy of the estimate
andtheaccuracyoftheuncertaintyof theestimate.
Inourexperiments,wecomparethefollowinglearningmethods: the Salford
SystemsimplementationofFriedman'smethodforlearningMARS(ASTAR)
mod-els[7],animplementationof asimpleregression-treelearningalgorithm described
byChickering et al. [3], and themethods described in Section 3 forlearningAR
andARTmodels.
Weapplythelearningmethodsto transformeddatasets usingnine dierent
transformationlengths(0p8). Thus, foreach dataset, welearnnine MARS
models,nineregression-treemodels,nineARmodelswithknownp,andnineART
models with known p. We additionally learn eight AR and ART models with
unknownp(0<p
max 8).
5 Results
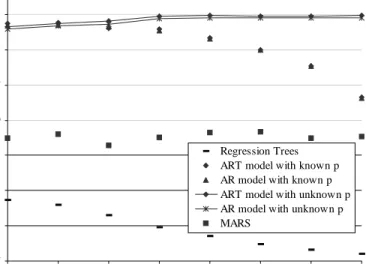
Theresultsofourexperimentsaresummarizedin Figure3. Inthisgure,weplot
the average sequential predictive scores for the models learned by the candidate
learningmethods. Thep th
point for alearning method is the average sequential
predictivescoreforthe2,494modelslearnedbythatmethod whenwerestrictthe
maximumdependencyto lengthp. Note thattheresultsoflearningAR andART
models with known p will havea dependency length of exactlyp. Weemphasize
the results for AR models with known p and for ART models with known p by
connecting the points with a curve. We do not plot the results of the learning
methods applied to the length-zerodata transformations. The result of using an
ARmodelonthistransformeddataobtainsanaveragesequentialpredictivescore
of-9.03. Theresultsoftheothermodelsarenearly identical.
Thepoorestperformingmodelsarethesimpleregressiontrees. Thefactthat
ARTmodels performsignicantlybetterindicates that allowingnon-triviallinear
regression at the leaves of the decision tree is important when modeling a time
series.
TheMARS method performs signicantlybetter thanthe simple regression
treebutworsethantheothermethods. Onepossibleexplanationofthisdierenceis
-8.7
-8.5
-8.3
-8.1
-7.9
-7.7
-7.5
-7.3
1
2
3
4
5
6
7
8
Maximum Dependency Length
A
v
er
ag
e
P
re
d
ict
iv
e
S
co
re
Regression Trees
ART model with known p
AR model with known p
ART model with unknown p
AR model with unknown p
MARS
Figure3. Comparisonofmethods.
necessarily depend on all of the p previous predictor variables. In contrast, the
forecastsmadebyMARSmodelsofteneliminatedsomeofthesepredictorvariables.
Infact, in manyofthe data sets, thebackwardstep-wise elimination stage ofthe
MARS method (see Friedman, 1991) eliminated all dependence on the predictor
variables. Thus, AR(p) and ART(p) place moreemphasis on recent timeperiods
forprediction,whichmayhaveledtobetterpredictions. Perhapsonecouldimprove
theperformanceoftheMARSsystembybiasingthesearchand selectionof knots
towardsrecenttimeperiods.
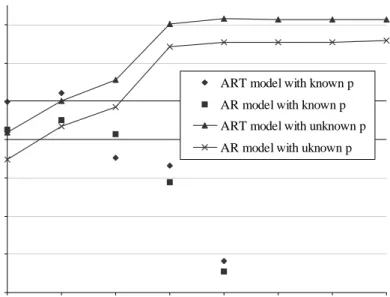
In Figure 4, we concentrate on the performance of the AR and ART
mod-elsthat are learnedwith known andunknown p. The fact that both theAR and
ARTcurveswithknownp(correspondingtomodelselectionforp)increaseroughly
monotonicallyis evidence thatour approach tomodelselection isworking.
Addi-tionally, thecomparison of therespective\known p"and \unknown p" pointsfor
the AR andART models indicate the benetsof model selection. Namely, aswe
includemoremodelsweareabletoimproveourpredictivescore|choosingmodels
that providegoodt withwithoutovertting. Nonetheless, thisbenettaperso
as p
max
increases. Note that thereis alargeincreasein performanceforbothAR
andARTmodelswhenallowingdependenciesatalagoffour. Webelievethisjump
is due, in part, to the fact that roughly onefourth of ourdata sets are quarterly
(e.g. quarterlysalesresultsforacompany).
InFigure 4, thecurve forART model with unknownpdominates thecurve
for AR model with unknown p indicating that the additional exibility of ART
modelsto modelnon-lineardependenciesleadsto bettergeneralization. Whilethe
dierencesinpredictiveaccuracyforvariousp
max
arenotaslargeasthedierences
-7.45
-7.43
-7.41
-7.39
-7.37
-7.35
-7.33
-7.31
1
2
3
4
5
6
7
8
Maximum Dependency Length
A
v
er
age
P
re
di
ct
iv
e
S
co
re
ART model with known p
AR model with known p
ART model with unknown p
AR model with uknown p
Figure4.EectivenessofmodelselectionandcomparisonofARandART
models.
Thep-valuesforallvaluesofp
max
arelessthan0:001forthesigntestandsmaller
fortheWilcoxonsigned-ranktest.
Recallthat anART modelwith nosplitsis anARmodel; thus,thelearning
procedure forART models canreturnanAR model. Wenote that in only5% of
thedatasetsdidtheresultingARTmodelhaveatleastonesplit. Thefact thata
largefractionofARTmodelshavenosplitsisdue,inpart,tothefactthatthedata
sets arefairlyshort time series. This explanationis supported bytheobservation
thatthenumberofsplitschosenbyourmethodiscorrelatedwiththelengthofthe
timeseries. WesuspectthatthebenetsofARTmodelswithrespecttoARmodels
willincreasewhenappliedtolongertimeseries.
6 Summary and Future Work
Ourexperimental resultsshowthat ARTmodelsare auseful familyofmodelsfor
time-seriesanalysisandourBayesianapproachtolearningARTmodelscanidentify
predictively accurate models. In addition, coupled with our method for model
selection,ARTmodelsprovideatractablefamilyofmodelsformodelingtime-series
datathatimproveonthestandardARmodels. Also,ARTmodelsprovideasimple
interpretablealternativetoothernon-lineartechniquessuchasneuralnetworks. Of
course,thereismoreworktobedoneinunderstandingthebenetsofARTmodels
andinimprovingtheirperformanceontime-seriespredictiontasks.
models. BecauseARtreesaresimplydecisiontreesapplied totime-seriesanalysis,
anysystemthatlearnsdecisiontreeswithlinearregressionsattheleavescanbeused
to build anAR tree. Several such systemsexist including theRETIS system[13]
andtheM5system[15]. ThesetwosystemsdierinthattheRETISsystemusesall
ofthefeaturesinthelinearregressionandusesthelinearregressiontoevaluatethe
modelduringthegreedyconstructionofthedecisiontree,whereastheM5addsthe
linearregressionwhilepruningthedecisiontreeandcanpotentiallyprunefeatures
fromthelinear-regression. Anotherapproachforlearningdecisiontreeswithlinear
regressionsattheleavesisdescribedbyChipman,George,andMcCulloch[4]. Their
BayesianapproachusesaMarkovChainMonteCarlotechniquetoexplorethespace
ofalternativemodels. Itwouldbeusefultocompareourapproachwithalternative
methods(includingalternativemethodsforlearningdecisiontrees)forthepurpose
oftime-seriesanalysisandotherregressionproblems.
In this paper, we have focused on ART(p) models with the following two
restrictions: (1)thesplit variablesarechosenfromamongtheppreviousvariables
and(2)theleavescontainAR(p)models. OurmethodforlearningART(p)models
canbeadaptedtoremovetheserestrictions. First,wecanexpandthesetofpossible
covariatesforoursplit-leafoperatorto includeadditionalcovariates(evendiscrete
covariates,e.g.,monthinadailytimeseries). Second,wecanincludeasearchover
subsetsofregressors. Itwould usefultoinvestigatethebenetsofthese andother
methodsforrelaxingtherestrictions.
ART models and our method for learningthem can also beadapted to the
analysisofmultivariatetimeseries(e.g. salesresultsfrommorethanonecompany).
Multivariatetimeseries canbehandled in twoways: (1) learndecisiontreeswith
multivariateregressionsin theleaves,or(2)learnaseparate ARTmodel foreach
timeseriesallowingforregressorsfromalltimeseries. Wesuspectthatthesecond
approachwouldbebetter,butfurther evaluation isneeded.
Wenotethat,bylearningasingletreewithMAPparametervalues,our
ART-model forecasting procedure ignores both structure and parameter uncertainty.
Structureuncertainty(includinguncertaintyaboutsplit points) canbetaken into
accountusingfullorpartialmodelaveraging(e.g.,[1]),butthecomputationalcost
isoftenprohibitive. Aswehavediscussed,parameteruncertaintycanbetakeninto
accountin acomputationally tractable mannerusing t-distributions. It would be
usefulto understandtherelativeimportance ofhandlingthese twocomponentsof
uncertainty.
Finally,oneimportantaspectofmodelingtimeseriesishandlingseasonalityin
data. SeasonalitycanbehandledusingARTmodelsbyexplicitlyallowingor
includ-ingrelevantregressorvariablesinthelinearregressionsattheleaves. Alternatively
onecanusestandardtechniquestode-seasonthedatapriorto theconstructionof
anARTmodel. Furtherexperimentationisneededtocharacterizetheperformance
Bibliography
[1] J.BernardoandA.Smith.BayesianTheory. JohnWileyandSons,NewYork,1994.
[2] D. Chickering, D. Heckerman, and C.Meek. ABayesianapproach to learning Bayesian
networkswithlocal structure. InProceedings of Thirteenth ConferenceonUncertainty in
ArticialIntelligence,Providence,RI.MorganKaufmann,August1997.
[3] D.Chickering,C.Meek,andR.Rounthwaite.EÆcientdeterminationofdynamicsplitpoints
inadecisiontree.InProceedingsofthe2001IEEEInternationalConferenceonDataMining,
pages91{98,SanJose,CA,November2001.IEEEComputerSociety.
[4] H.Chipman,E.George,and R.McCulloch. Bayesiantreedmodels,to appear inMachine
Learning. Technical Report http://bevo2.bus.utexas.edu/GeorgeE/Research
papers/treed-models.pdf,UniversityofWaterloo,2001.
[5] P.Dawid. Statisticaltheory. Theprequential approach (withdiscussion). Journal of the
RoyalStatisticalSocietyA,147:178{292,1984.
[6] M.DeGroot. OptimalStatisticalDecisions.McGraw-Hill,NewYork,1970.
[7] J.Friedman. Multivariateadaptiveregressionsplines.AnnalsofStatistics,19,1991.
[8] N.GershenfeldandA.Weigend. Thefutureoftimeseries: learningandunderstanding. In
Timeseriesprediction,pages1{70.AddisonWesley,NewYork,1994.
[9] J.Hamilton.TimeSeriesAnalysis.PrincetonUniversityPress,Princeton,NewJersey,1994.
[10] D.Haughton. Onthe choiceofa modelto tdata fromanexponentialfamily. Annals of
Statistics,16:342{355,1988.
[11] D. Heckerman and D.Geiger. LearningBayesian networks: Aunication fordicrete and
Gaussiandomains.InProceedingsofEleventhConferenceonUncertaintyinArticial
Intel-ligence,Montreal,QU,pages274{284.MorganKaufmann,August1995. SeealsoTechnical
ReportTR-95-16,MicrosoftResearch,Redmond,WA,February1995.
[12] M.Henrion.PropagationofuncertaintybyprobabilisticlogicsamplinginBayes'networks.In
ProceedingsoftheSecondWorkshoponUncertaintyinArticial Intelligence,Philadelphia,
PA.AssociationforUncertaintyinArticialIntelligence,MountainView,CA,August1986.
Also inKanal, L.and Lemmer,J., editors, Uncertainty in Articial Intelligence 2, pages
149{164.North-Holland,NewYork,1988.
[13] A.Karalic.Employinglinearregressioninregressiontreeleaves. InProceedingsofECAI-92,
pages440{441.JohnWiley&Sons,1992.
[14] P.Lewis, B. Ray, and J. Stevens. Modeling time seriesby using mars. In Time series
prediction,pages297{318.AddisonWesley,NewYork,1994.
[15] J.R.Quinlan.Learningwithcontinuousclasses.InProceedingsofofthe5thAutralianJoint
ConferenceonArticialIntelligence,pages343{348.WorldScientic,1992.
[16] H.Tong. ThresholdmodelsinNonlinearTimeSeriesAnalysis. Springer-Verlag,NewYork,
Appendix
We derive formulas for LeafScore(l
i
) given by Equation 7, and for ~
i
, the MAP
parametersforthelinearregressionatleafl
i
givenbyEquation8.
HeckermanandGeiger[11]|hereinHG|makethefollowingassumptionsfora
setofobservationsd=(x 1 ;:::;x N )whereeachx t =(x t 1 ;:::;x t p+1 )isanobservation overvariablesX =(X 1 ;:::;X p+1
): (1)thelikelihoodofthedataforagivenmodel
structuresis Q N i=t p(x t 1 ;:::;x t p+1
j;W;s)whereeachtermisamultivariate-Normal
distributionwithunknownmeanvectorandprecisionmatrixW,(2)p(Wjs)isa
Wishartdistribution,and(3)p(jW;s)isamultivariate-normaldistribution. Under
theseassumptions,itfollowsthattherelationshipbetweenX
p+1 andX 1 ;:::;X p is
thelinearregression:
p(x t p+1 jx t 1 ;:::;x t p ;;s)=N(m+ p X j=1 b j x p ; 2 ); t=1;:::;N (9) where, m= p+1 p X i=1 b i i ; b j = p X i=1 (W 1 ) p+1;i (((W 1 ) pp ) 1 ) ij ; 2 =1=W p+1;p+1 : (10)
InEquation10,weusevector-matrixnotationinwhichv
i denotesthei th elementof vectorv,M ij
denotestheelementin thei th
rowandj th
columnofmatrixM,and
M pp
denotestheupperppsub-matrixofM. HG'sassumptionsalsoimplythat
=(m;b 1 ;:::;b p ; 2
) hasa normal-gamma distribution. Thus, when we identify
the casesin d with those that fall to leaf l
i
and identify in Equation9 with
i
in themainbodyofthetext,wendthatHG'sassumptions implytheconditions
leading to the expressions for LeafScore(l
i ) in Equation 7 and ~ i in Equation 8.
Thus,weusetheHGframeworktoderivethese quantities.
Followingtheirapproach,letp(jW;s)beamultivariate-normaldistribution
with mean
0
and precision matrix
W ( > 0), and p(Wjs) be a Wishart distributionwith W degreesoffreedom ( W
>p) andpositive-denite precision
matrixW
0
. Then,theMAPparametervalues|thosethatmaximizetheprobability
ofdgivenands|aregivenby
~ = 0 +N N +N and ~ W 1 = 1 W +N (p+1) W N where W N =W 0 +S N + N +N ( 0 N )( 0 N ) 0 (11)
Intheseandsubsequentequations,weusevectorv todenoteacolumnvectorand
v 0
todenotethetransposeofv(arowvector). Theterms
N andS
N
arethesample
meanandscattermatrix,respectively,givenby
N = 1 N N X t=1 x t and S N = N X t=1 (x t N )(x t N ) 0 (12)
WeobtaintheMAPvaluesfor=(m;b
1 ;:::;b
p
;)bytransformingthese
expres-sionsfor~and ~
W 1
accordingtothemappingin Equation10.
GivenHG'sassumptions, italsofollowsthat themarginallikelihoodis given
by p(djs)= (p+1)N =2 +N (p+1)=2 c(p+1; W +N) c(p+1; W ) jW 0 j W 2 jW N j W +N 2 (13) where c(l;)= l Y i=1 +1 i 2 : (14) In addition, (X 1 ;:::;X p
) has a (p-dimensional) multivariate-normal distribution
withunknownmeanandprecision,whichweshalldenote andW ,respectively.
Furthermore, p( jW ;s) has a multivariate-normal distribution with mean
0
(the rst p entries of ) and precision matrix
W , and p(W js) is a Wishart
distributionwith
W
1degrees of freedom and precisionmatrixW
0 such that (W 0 ) 1
is equalto theupper ppsub-matrix of (W
0 )
1
. Thus, ifweletd be
the data d restricted to the variables (X
1 ;:::;X
p
), then the marginal likelihood
p(d js)isgivenbythep-dimensionalversionofEquation13,with
0 ,W 0 ,and W , replacedby 0 ,W 0 ,and W
1,respectively. Finally,the(conditional)marginal
likelihoodisgivenby Z N Y t=1 p(x t p+1 jx t 1 ;:::;x t p ;;s)p(js)d i = p(djs) p(d js) : (15)
Substituting the expression for p(djs) given by Equation 13 and the analogous
expression for p(d js) into Equation 15, we obtain a formula for the
marginal-likelihoodcomponentofLeafScore(l
i ).
Inourexperiments,weuse
0 =0,W
0
=I (theidentitymatrix),
=1,and
W
=p+2appliedtodatathathasbeenstandardizedtohaveameanofzeroand