Containment relations in split graphs
Petr A. Golovach
∗Marcin Kami´nski
†Dani¨el Paulusma
∗Dimitrios M. Thilikos
‡Abstract
A graph containment problem is to decide whether one graph can be modified into some other graph by using a number of specified graph operations. We con-sider edge deletions, edge contractions, vertex deletions and vertex dissolutions as possible graph operations permitted. By allowing any combination of these four operations we capture the following ten problems: testing on (induced) minors, (induced) topological minors, (induced) subgraphs, (induced) spanning subgraphs, dissolutions and contractions. A split graph is a graph whose vertex set can be par-titioned into a clique and an independent set. Our results combined with existing results settle the parameterized complexity of all ten problems for split graphs. Keywords.subgraph, minor, topological minor, contraction.
1
Introduction
There are several natural and elementary algorithmic problems to test whether the structure of some graphH shows up as apatternwithin the structure of another graph
G. Before we give a survey of existing work and present our results, we first state our terminology.
Terminology.We consider undirected finite graphs with no loops and with no multiple edges. We denote the vertex set and edge set of a graphGbyVGandEG, respectively.
If no confusion is possible, we may omit subscripts. We refer the reader to Diestel [7] for any undefined graph terminology.
LetG= (V, E)be a graph. We writeG[U]to denote the subgraph ofGinduced byU ⊆V, i.e., the graph on vertex setU and an edge between any two vertices if and only if there is an edge between them inG. We say thatUis acliqueif there is an edge inGbetween any two vertices ofU, andU is anindependent setif there is no edge inGbetween any two vertices ofU. Two setsU, U0 ⊆V are calledadjacentif there
∗School of Engineering and Computing Sciences, University of Durham, United Kingdom,
{Petr.Golovach,Daniel.Paulusma}@durham.ac.uk, supported by EPSRC (EP/G043434/1). †The author is Charg´e de Recherches du F.R.S. – FNRS; D´epartement d’Informatique, Universit´e Libre de Bruxelles, Belgium,[email protected].
‡Departement of Mathematics, National and Kapodistrian University of Athens, Greece,
[email protected], supported by the project “Kapodistrias” (AΠ 02839/ 28.07.2008) of the National and Kapodistrian University of Athens (project code: 70/ 4/8757).
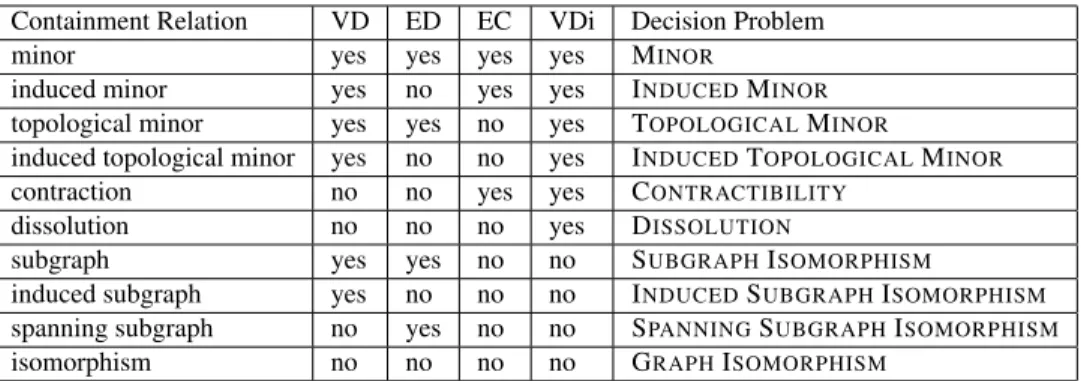
Containment Relation VD ED EC VDi Decision Problem
minor yes yes yes yes MINOR
induced minor yes no yes yes INDUCEDMINOR
topological minor yes yes no yes TOPOLOGICALMINOR
induced topological minor yes no no yes INDUCEDTOPOLOGICALMINOR
contraction no no yes yes CONTRACTIBILITY
dissolution no no no yes DISSOLUTION
subgraph yes yes no no SUBGRAPHISOMORPHISM
induced subgraph yes no no no INDUCEDSUBGRAPHISOMORPHISM
spanning subgraph no yes no no SPANNINGSUBGRAPHISOMORPHISM
isomorphism no no no no GRAPHISOMORPHISM
Table 1: Known containment relations in terms of the graph operations.
exist verticesu∈U andu0 ∈U0such thatuu0 ∈E. A vertexvis aneighborofuif
uv∈E. Thedegreeof a vertexuis its number of neighbors.
Lete =uvbe an edge in a graphG. Theedge contractionoferemovesuandv
fromG, and replaces them by a new vertex adjacent to precisely those vertices to which
uorvwere adjacent. If one of the two vertices, sayu, has exactly two neighbors which in addition are nonadjacent, then we call this operation thevertex dissolutionofu.
The total number of different combinations of the graph operations vertex deletion, edge deletion, edge contraction and vertex dissolution is 16. However, four of these combinations are not possible, because a vertex dissolution is a special case of an edge contraction. Hence, if we allow edge contractions, then we must also allow vertex dissolutions. Ten of the 12 remaining combinations lead to known graph containment relations. This is shown in Table 1 where VD, ED, EC, and VDi stand for “vertex deletions”, “edge deletions”, “edge contractions”, and “vertex dissolutions”, respec-tively. For instance, we say that a graphH is an induced minor of a graphGif H
can be obtained fromGby a sequence of graph operations that allow vertex deletions, vertex dissolutions and edge contractions, but no edge deletions. The corresponding decision problem, in whichG andH form the ordered input pair(G, H), is called INDUCED MINOR. The other rows in Table 1 should be interpreted similarly. The remaining two combinations “no yes yes yes”, and “no yes no yes”, which are not in Table 1, are equivalent to minors and topological minors, respectively, if we allow an extra operation that removes isolated vertices. Finally, we note that a graphGis called asubdivisionof a graphHif and only ifHis a dissolution ofG. In that caseGcan be obtained fromH by a sequence ofedge subdivisions; this operation removes an edge
e=uvfromGand introduces a new vertex that is (only) adjacent touandv.
Existing and new results.The problems in Table 1 except GRAPHISOMORPHISMare easily seen to beNP-complete, as has been observed by Matouˇsek and Thomas [22] for all these problems except SPANNING SUBGRAPH ISOMORPHISM, which is not included in their analysis; this problem isNP-complete, because it contains as a special case theNP-complete problem that tests whether a graph has a Hamiltonian cycle. Therefore Matouˇsek and Thomas [22] put some restrictions on the ordered input pair
(G, H). In particular, they showed that all problems from Table 1 except GRAPH
ISOMORPHISM, DISSOLUTIONand SPANNINGSUBGRAPHISOMORPHISMstayNP -complete whenGis a partial 2-tree.
Another natural direction is to fix the graphH in an ordered input pair (G, H)
and consider only the graphGto be part of the input. We indicate this by adding “H-” to the names of the decision problems. For any fixed H, the problems H -SUBGRAPHISOMORPHISM,H-INDUCEDSUBGRAPHISOMORPHISM,H-SPANNING
SUBGRAPHISOMORPHISM, andH-GRAPHISOMORPHISMcan be solved in polyno-mial time by brute force. It is easy to see thatH-DISSOLUTION is fixed-parameter
tractable, when the order ofHis the parameter; for completeness we show this in our paper. A celebrated result by Robertson and Seymour [24] states thatH-MINOR and
H-TOPOLOGICAL MINORcan be solved in cubic time and polynomial time, respec-tively, for every fixed graphH. The latter result has recently been improved by Grohe, Kawarabayashi, Marx, and Wollan [16] who showed that TOPOLOGICAL MINOR is fixed-parameter tractable, when the order ofH is the parameter.
The computational complexity classification of the problems H-INDUCED MI
-NOR,H-INDUCED TOPOLOGICAL MINORandH-CONTRACTIBILITYis still open, although many partial results are known. Fellows, Kratochv´ıl, Middendorf, and Pfeiffer [10] give both polynomial-time solvable andNP-complete cases for the H -INDUCED MINORproblem. L´evˆeque, Lin, Maffray, and Trotignon [19] do the same for theH-INDUCEDTOPOLOGICALMINORproblem. Polynomial-time solvable and
NP-complete cases for the H-CONTRACTIBILITY problem can be found in a series of papers starting by Brouwer and Veldman [5] and followed by Levin, Paulusma and Woeginger [20, 21] and van ’t Hof et al. [17]. Because some of the open cases are notoriously difficult, special graph classes have been studied. Fellows, Kratochv´ıl, Middendorf, and Pfeiffer [10] showed that for every fixed graphH, theH-INDUCED
MINOR problem can be solved in polynomial time on planar graphs. Also, the H -CONTRACTIBILITYproblem is polynomial-time solvable for every fixed H on this graph class [18]. Fiala et al. [11] show that for every fixedH, theH-INDUCEDTOPO
-LOGICALMINORproblem can be solved in polynomial time on claw-free graphs. A graph Gis a split graphifG has asplit partition, which is a partition of its vertex set into a cliqueCGand an independent setIG. Split graphs were introduced
by Foldes and Hammer [13] in 1977 and have been extensively studied since then; see e.g. the monographs of Brandst¨adt, Le and Spinrad [4], or Golumbic [15]. Bel-monte, Heggernes, and van ’t Hof [2] showed that for every fixed graphH, theH -CONTRACTIBILITYcan be solved in polynomial time for split graphs.
We determine the parameterized complexity of the problems in Table 1 for split graphs. In particular, we answer a question of Belmonte, Heggernes, and van ’t Hof [2] regarding the parameterized complexity of the CONTRACTIBILITYproblem for split graphs. Combining our work with previously known results leads to the following three theorems which we prove in Sections 3-5, respectively.
Theorem 1. The problemsGRAPH ISOMORPHISMand DISSOLUTIONareGRAPH -ISOMORPHISM-complete for ordered pairs(G, H)whereGandH are split graphs. The other 8 problems in Table 1 areNP-complete for such input pairs.
Theorem 2. For any fixed graphH, all problems in Table 1 can be solved in polyno-mial time for ordered pairs(G, H)whereGis a split graph.
Theorem 3. The problems INDUCED MINOR, INDUCED TOPOLOGICAL MINOR, CONTRACTIBILITYandINDUCEDSUBGRAPHISOMORPHISMareW[1]-complete for ordered pairs(G, H)whereGandHare split graphs, and|VH|is the parameter. The
other 6 problems from Table 1 are fixed-parameter tractable for ordered pairs(G, H)
whereGis a split graph, and|VH|is the parameter.
2
Preliminaries
For some of our proofs the following global structure is useful. LetGandH be two graphs. AnH-witness structureW is a vertex partition of a (not necessarily proper) subgraph ofGinto|VH|(nonempty) setsW(x)called(H-witness) bags, such that
(i) eachW(x)induces a connected subgraph ofG,
(ii) for allx, y∈VHwithx6=y, bagsW(x)andW(y)are adjacent inGifxandy
are adjacent inH.
In addition, we may require the following additional conditions:
(iii) for allx, y∈VH withx6=y, bagsW(x)andW(y)are adjacent inGonlyifx
andyare adjacent inH,
(iv) every vertex ofGbelongs to some bag.
By contracting all bags to singletons we observe thatH is a minor, induced minor, or contraction ofGif and only ifGhas anH-witness structure such that conditions (i)-(ii), (i)-(iii), or (i)-(iv) hold, respectively. We note thatGmay have more than one
H-witness structure with respect to the same containment relation.
LetGbe a graph. Theincidence graphofGis the bipartite graph with partition classesV andEand edgesueif and only ifuis an end vertex ofe.
LetGbe a split graph with split partition(CG, IG). IfCG is a maximal clique,
then we call the split partition(CG, IG)maximal. This means that there is no vertex
inIGthat is adjacent to all vertices inCG. For our purposes, maximal split partitions
are very useful. Note that a (maximal) split partition does not have to be unique. IfG
has anH-witness structure for some graphH with split partition(CH, IH), then we
call the bags corresponding to the vertices inCHandIHclique bagsandindependent
bags, respectively. We observe that split graphs are closed under edge contractions, vertex deletions, and vertex dissolutions; they are not – in general – closed under edge deletions and edge subdivisions.
We finish this section by giving a short introduction into the theory of parameter-ized complexity. Here, we consider the problem input as a pair(I, k), whereI is the main part andkthe parameter. A problem isfixed-parameter tractableif an instance
the size ofI, andca constant independent ofk. The classFPTis the class of all fixed-parameter tractable decision problems. Similar to the theory ofNP-completeness, pa-rameterized complexity offers a completeness theory that allows the accumulation of strong theoretical evidence that some parameterized problems are not fixed-parameter tractable. This completeness theory is based on a hierarchy of complexity classes
W[1],W[2], . . . ,XP. For more background on these classes we refer to the mono-graphs of Downey and Fellows [9], Flum and Grohe [12], and Niedermeier [23]. We only mention the following. The complexity classXPconsists of parameterized deci-sion problemsΠsuch that for each instance(I, k)it can be decided inf(k)|I|g(k)time
whether(I, k) ∈Π, wheref andg are computable functions depending only on the parameterk, and|I|denotes the size ofI. SoXPconsists of parameterized decision problems which can be solved in polynomial time if the parameter is a constant. Fur-thermore, the aforementioned classes form a chainFPT⊆W[1]⊆W[2]⊆. . .⊆XP
where all inclusions are conjectured to be proper; onlyFPT6= XPis known [9, 12]. A well-known technique to show that a parameterized problemΠis fixed-parameter tractable is to find areduction to a problem kernel, i.e., to replace an instance(I, k)of
Πwith an instance(I0, k0)ofΠ(called aproblem kernel) such that (i) k0 ≤kand|I0| ≤g(k)for some computable functiong;
(ii) the reduction from(I, k)to(I0, k0)is computable in polynomial time;
(iii) (I, k)is aYes-instance ofΠif and only if(I0, k0)is aYes-instance ofΠ. The upper boundg(k)is called thekernel size. A kernel ispolynomialif the kernel size is polynomial ink. It is well known that a parameterized problem is fixed-parameter tractable if and only if it has a kernel (cf. [23]).
3
The Proof of Theorem 1
The GRAPHISOMORPHISMproblem stays GRAPHISOMORPHISM-complete when stricted to split graphs (cf. the survey of Booth and Colbourn [3]). One can use this re-sult to show that the DISSOLUTIONproblem is also GRAPHISOMORPHISM-complete for split graphs as follows. Subdividing an edge of a split graph results in a graph that is not a split graph unless the edges of the original split graph form a star. Now letG
andH be two split graphs that form an instance of GRAPHISOMORPHISM. Then we may assume without loss of generality that the edges ofGdo not form a star; other-wise we can check ifGis isomorphic toH in polynomial time. Hence, from the above observation,Gis isomorphic toHif and only ifGcontainsHas a dissolution.
Belmonte, Heggernes, and van ’t Hof [2] show that CONTRACTIBILITYis NP -complete for ordered pairs(G, H)whereGis a split graph andH is a threshold graph; threshold graphs form a subclass of the class of split graphs. The problems SPAN
-NINGSUBGRAPHISOMORPHISM, SUBGRAPHISOMORPHISM, MINOR, TOPOLOGI
-CALMINORareNP-complete for split graphs as shown in Theorem 4. The problems INDUCEDMINOR, INDUCEDTOPOLOGICALMINORand INDUCEDSUBGRAPHISO
INDUCEDSUBGRAPHISOMORPHISMhas already been proven by Damaschke [6] but it also follows directly from our reduction for the other two problems.
Theorem 4. The problemsSPANNINGSUBGRAPHISOMORPHISM,SUBGRAPHISO
-MORPHISM,MINOR, andTOPOLOGICALMINORareNP-complete for ordered pairs
(G, H)whereGandH are split graphs.
Proof. We give a reduction from the HAMILTONIAN CYCLE problem, which asks whether a graph has aHamiltonian cycle, i.e., a spanning subgraph that is a cycle. This problem is well known to beNP-complete (cf. [8]).
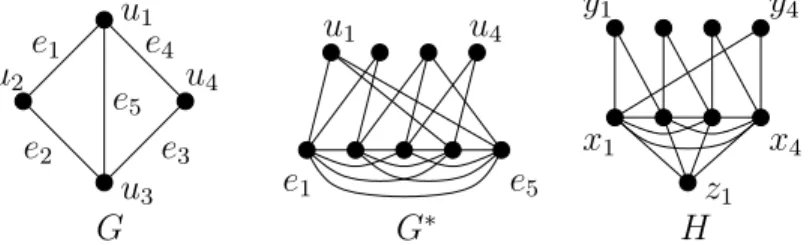
LetG= (V, E)be a graph onnvertices. We may assume without loss of generality that|E| ≥n+ 1. LetIbe the incidence graph ofG. FromIwe construct a graphG∗
by adding an edge between any two vertices inE. Note thatG∗ is a split graph with
CG∗=EandIG∗=V. Recall that|E| ≥n+ 1. Then we can define a split graphH
byCH ={x1, . . . , xn, z1, . . . , z|E|−n}andIH ={y1, . . . , yn}such thatyiis (only)
adjacent toxiandxi+1fori = 1, . . . , n−1andynis (only) adjacent toxnandx1.
An example ofG∗andHis shown in Figure 1.
u
1u
2u
4u
3e
5G
u
1u
4G
∗x
1z
1H
e
2y
1y
4x
4e
4e
1e
1e
5e
3Figure 1: An example of a graphHand a graphG∗constructed from a graphG. We only need to show that the following 5 statements are equivalent.
(1) Ghas a Hamiltonian cycle;
(2) G∗containsHas a spanning subgraph; (3) G∗containsHas a subgraph;
(4) G∗containsHas a topological minor; (5) G∗containsHas a minor.
“(1)⇒(2)” Suppose thatGhas a Hamiltonian cycleu1u2· · ·unu1. Letei =uiui+1
fori = 1, . . . , n−1 anden = unu1. Then the spanning subgraph ofG∗ that has
as edges all edges ofCG∗ together with edgesu1e1,u1en anduiei,uiei−1for i =
2, . . . , nis isomorphic toH.
“(2)⇒(3)”, “(3)⇒(4)” and “(4)⇒(5)” are true by definition.
“(5)⇒(1)” Suppose thatG∗containsHas a minor. LetWbe anH-witness structure ofG∗. BecauseG∗andHhave the same number of vertices, all bags inWconsist of
exactly one vertex. No clique bag can consist of a vertex ofIG∗, because such a vertex
has degree at mostn−1, whereas every clique bag is adjacent to|E| −1 ≥nother clique bags. Hence, every clique bag consists of a vertex ofCG∗, and consequently,
every independent bag consists of a vertex ofIG∗. Letexi be the vertex ofCG∗ that
forms clique bagW(xi)fori= 1, . . . , n, and letuyi be the vertex ofIG∗ that forms
independent bagW(yi)fori= 1, . . . , n. Becausex1y1x2y2· · ·xnynx1is a2n-vertex
cycle inH, we find thatex1uy1ex2uy2· · ·exnuynex1is a2n-vertex cycle inG
∗. Then,
from the definition ofG∗, we find thatuy1uy2· · ·uynuy1is ann-vertex cycle inG, i.e., a cycle that contains all vertices ofG. Hence, we have found a Hamilton cycle inG, as desired. This completes the proof of Theorem 4.
Theorem 5. The problemsINDUCEDSUBGRAPHISOMORPHISM,INDUCEDMINOR, and INDUCED TOPOLOGICAL MINOR are NP-complete for ordered pairs (G, H)
whereGandHare split graphs.
Proof. We give a reduction from the CLIQUEproblem, which asks whether a graph has a clique of size at leastk. This problem isNP-complete (cf. [8]).
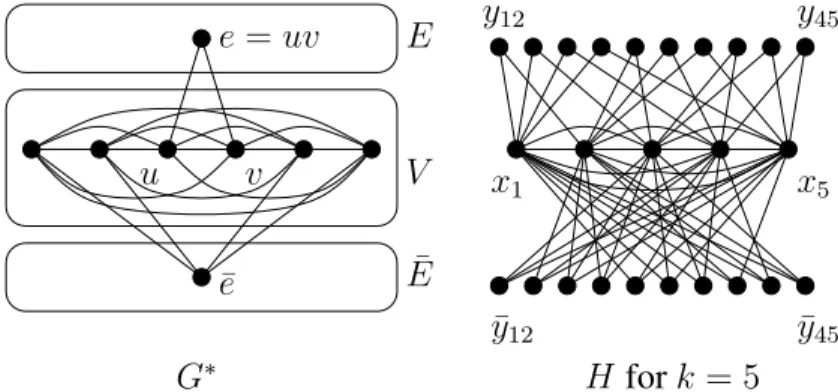
LetG= (V, E)be a graph, and letkbe some integer. For our purposes, we require thatk ≥6. FromGwe construct a split graphG∗ as follows. LetIbe the incidence graph ofG. We change the subgraph ofI[V]into a complete graph by adding an edge between any two vertices inV. For eache ∈ E we add a new vertex¯etoI that is adjacent to all vertices inV except to the two end-vertices ofe. We letE¯ denote the set of all verticese¯. This completes the construction ofG∗. We observe thatG∗is a split graph withCG∗=V andIG∗=E∪E¯; also see Figure 2.
We letH be the split graph withCH ={x1, . . . , xk}andIH ={yij | 1 ≤ i <
j ≤k} ∪ {¯yij |1 ≤i < j ≤k}, such that everyyij is (only) adjacent toxiandxj,
and everyy¯ij is only adjacent toCH\{xi, xj}. See Figure 2 for an example ofH; for
clarity we chose to depict the casek= 5, although we assume thatk≥6in our proof.
¯
y
12e
=
uv
V
u
v
x
1x
5y
12y
45¯
y
45H
for
k
= 5
G
∗¯
e
E
¯
E
Figure 2: The construction of the graphG∗and the graphHfork= 5. We only need to show that the following 4 statements are equivalent. (1) Ghas a clique of size (at least)k;
(2) G∗hasHas an induced subgraph;
(3) G∗hasHas an induced topological minor; (4) G∗hasHas an induced minor.
“(1)⇒(2)” SupposeGhas a cliqueK ={u1, . . . , uk}of sizek. Then the subgraph
ofG∗induced by
K∪ {e|e=uiujfor somei, j} ∪ {¯e|e=uiujfor somei, j}
is isomorphic toH.
“(2)⇒(3)” and “(3)⇒(4)” are true by definition.
“(4)⇒(1)” Suppose thatG∗ hasH as an induced minor. Then there exists anH -witness structureW ofG∗ that satisfies conditions (i)-(iii). We start by proving the following claim.
Claim 1. For everyyijthere exists somee∈Esuch thatW(yij) ={e}andW(¯yij) =
{¯e}.
We prove Claim 1 as follows. Consider a pairi, j with1 ≤ i < j ≤ k. We first consider bagW(yij)and then bagW(¯yij).
In order to obtain a contradiction, suppose thatW(yij)does not consist of exactly
one vertex fromE. BecauseE is independent, W(yij)cannot be a subset ofE of
at least two vertices. This means thatW(yij) must contain a vertex w ∈ E¯ ∪V.
By construction, W(yij)is adjacent to exactly two clique bags, namely W(xi)and
W(xj). Becausek≥6, we then find thatW(yij)is not adjacent to at least four clique
bags. Because these bags are mutually adjacent andE∪E¯ is independent, at least three of these four clique bags must contain a vertex fromV. Ifw ∈ V thenwis adjacent to a vertex in all three of them, becauseV is a clique inG∗. Ifw∈E¯, then
wis adjacent to a vertex in at least one of them. This is not possible. We conclude that
W(yij) ={e}for somee∈E, as desired.
To complete the proof of Claim 1, we must show thatW(¯yij) ={¯e}. Suppose that
W(¯yij)6={¯e}. We first consider the case in whichW(¯yij)contains a vertex inV. By
construction,W(¯yij)is adjacent to all but two clique bags, namelyW(xi)andW(xj).
BecauseV is a clique,W(xi)andW(xj)cannot contain a vertex fromV. ThenW(xi)
andW(xj)only contain vertices fromE∪E¯. BecauseE∪E¯is independent, we then
find thatW(xi)andW(xj)are not adjacent. However, this cannot happen, because
W(xi) andW(xj)are clique bags. We conclude that W(¯yij)contains no vertices
fromV. BecauseE∪E¯is independent, this means thatW(¯yij)consists of exactly one
vertexw∈E∪E¯.
Suppose thatw∈E. Becausek≥6,W(¯yij)is adjacent to at least four bags. This
is not possible, becausewhas degree 2. Hence,w /∈E. This implies thatw∈E¯. Let
e=uv. BecauseW(yij) = {e}, we find that one end-vertex ofe, sayu, belongs to
W(xi), whereas the other one,v, belongs toW(xj). Becausee¯is the only vertex in
¯
Ethat is adjacent to neitherunorv, we find thatw= ¯e, as desired. This finishes the proof of Claim 1.
Due to Claim 1, we may writeW(yij) = {eij}andW(¯yij) ={¯eij}for1 ≤i <
j≤k, where eacheijis a vertex ofG∗that corresponds to an edge inG. We also need
the following claim.
Claim 2. For all1≤i < j≤k, the bagsW(xi)andW(xj)each contain exactly one
vertex ofV, which is an end-vertex ofeij, and possibly one or more vertices ofE∪E.
We prove Claim 2 as follows. Let1≤i < j≤k, and leteij =uv. Becauseeijis only
adjacent touandvinG∗, we may without loss of generality assume thatu∈W(xi)
andv ∈ W(xj). In order to obtain a contradiction, suppose that one of these bags,
sayW(xi), contains some other vertexw ∈ V. ThenW(xi)andW(¯yij) = {¯eij}
are adjacent, becausewand¯eijare adjacent. However, this is not possible because by
constructiony¯ijis only adjacent toCH\{xi, xj}. Hence we have proven Claim 2.
Due to Claim 2, there arekverticesu1, . . . , ukin(W(x1)∪ · · · ∪W(xk))\(E∪E)¯ .
Claim 2 also tells us that any two verticesui, uj are adjacent inG. Hence, we have
found a clique inGof sizek, as desired. This completes the proof of Theorem 5.
4
The Proof of Theorem 2
Recall that for any fixed graphH, the problemsH-SUBGRAPH ISOMORPHISM, H -INDUCED SUBGRAPH ISOMORPHISM, H-SPANNING SUBGRAPH ISOMORPHISM, andH-GRAPH ISOMORPHISM can be solved for general graphs in polynomial time by brute force, and that Robertson and Seymour [24] showed that for any fixed graph
H, the problems H-MINOR andH-TOPOLOGICAL MINOR can be solved in cubic time and polynomial time, respectively, for general graphs. Also recall that Bel-monte, Heggernes and van ’t Hof [2] showed that for any fixed graph H, the H -CONTRACTIBILITY problem can be solved in polynomial time for split graphs. It is easy to see thatH-DISSOLUTIONis fixed-parameter tractable for parameter|VH|,
as we show in Section 5. Hence, the remaining cases are the classifications of H -INDUCED MINOR andH-INDUCED TOPOLOGICAL MINOR. We prove these cases in Theorem 6 and Corollary 1, respectively. Theorem 6 also contains a proof for the
H-CONTRACTIBILITYproblem restricted to split graphs; our proof has been found in-dependently and uses different arguments than the proof of Belmonte, Heggernes and van ’t Hof [2] for this problem and graph class. We first prove the following lemma.
Lemma 1. LetGandH be two split graphs with maximal split partitions(CG, IG)
and (CH, IH), respectively. LetW be an H-witness structure of Gsatisfying
con-ditions (i)-(iii) or (i)-(iv). ThenGhas anH-witness structure satisfying conditions (i)-(iii) or (i)-(iv), respectively, in which every independent bag consists of exactly one vertex ofIG.
Proof. Suppose that some independent bagW of Wdoes not consist of exactly one vertex ofIG. BecauseIGis independent andG[W]is connected,W contains a vertex
fromCG. BecauseCG is a clique and independent bags may not be adjacent, this
means that all other independent bags contain no vertices fromCG. Consequently,
these bags consist of single vertices fromIG. Because(CH, IH)is a maximal split
By combining the three facts thatCG is a clique,W contains a vertex fromCG,
andW0 is not adjacent toW, we find that W0 does not contain a vertex from CG.
HenceW0 can only contain vertices fromIG. BecauseIGis independent andG[W0]
is connected, this means thatW0consists of a single vertex fromIG.
Recall that all independent bags not equal to W contain no vertices from CG.
Hence, they must consist of (single) vertices fromIG. Consequently, they are not
adjacent toW0, becauseW0consists of a single vertex fromIGas well. By definition,
all independent bags not equal toW are not adjacent toW either. All clique bags not equal toW0must contain at least one vertex fromCG; otherwise they are not adjacent
toW0, asW0consists of a single vertex fromIG. BecauseW contains a vertex from
CG, this means thatW is also adjacent to all clique bags not equal toW0. Hence,W
andW0are adjacent to exactly the same bags ofW, and we can swap them. In this way we have obtained aH-witness structureW∗ofGthat satisfies conditions (i)-(iii) and in
which every independent bag consists of exactly one vertex ofIG. Because we did not
remove any vertices from any bag ofW, we find thatW∗also satisfies condition (iv)
ifWsatisfies this condition. This proves Lemma 1.
LetGbe a graph that has anH-witness structureW satisfying conditions (i)-(iii) for some graphH. We define theorderofWto be the number of vertices in the union of all the witness bags ofW. Note that the order ofWis at most|VG|, with equality if
and only ifWsatisfies condition (iv) as well. IfGhas anotherH-witness structureW0
satisfying conditions (i)-(iii), then we callW0 asubstructureofWifW0(x)⊆W(x)
for allx∈VH.
Lemma 2. LetGandHbe two split graphs with maximal split partitions(CG, IG)and
(CH, IH), respectively. LetW be anH-witness structure ofGsatisfying conditions
(i)–(iii), in which every independent bag consists of exactly one vertex ofIG. Then
Ghas anH-witness structureW0satisfying conditions (i)-(iii) that has order at most (|CH|+ 1)(|IH|+ 1)and that is a substructure ofW.
Proof. We writeCH ={x1, . . . , xp}andIH ={y1, . . . , yq}. By our assumption on
W, there existqverticesu1, . . . , uq ofIG such thatW(yj) ={uj}forj = 1, . . . , q.
We call these vertices theu-vertices.
Forj = 1, . . . , q, letWj be the set of adjacent witness bags ofW(yj). Note that
everyWj is a subset of the clique bags ofW. By definition, eachujhas at least one
neighbor in every bag ofWj. For eachujwe pick one such a neighbortij from every
bagW(xi)ofWj. We call such a vertex at-vertex. Note thatthj=tijis possible for
two verticesuhanduithat are adjacent to the same witness bagW(xi).
Because two vertices from IG are not adjacent, there exists at most one clique
bagW∗that contains no vertex fromCG. Moreover, if this clique bagW∗exists, then
it consists of exactly one vertexu∗fromIGdue to the same reason. We call this vertex
au-vertex as well. By definition,u∗ has at least one neighbor in every other clique bag. Then, in the case thatu∗exists, we choose one neighbort∗i ofu∗from each other clique bagW(xi)and call it at-vertex as well.
By definition, vertices inIG are only adjacent to vertices inCG. Hence, everyt
-vertex belongs toCG. This means that the adjacency relations between the clique bags
vertices that are neithert-vertices noru-vertices. By our choice oft-vertices, also the adjacency relations between the clique bags and the independent bags, and between
W∗and the other clique bags, are preserved. This leads to anH-witness structureW0
ofGthat satisfies conditions (i)-(iii). Because for each of the at mostq+ 1u-vertices we picked at mostp t-vertices,W0has order at mostq+1+p(q+1) = (p+1)(q+1) = (|CH|+ 1)(|IH|+ 1). Because we did not move any vertices from one witness bag to
some other,W0is a substructure ofW. This completes the proof of Lemma 2.
Theorem 6. For any fixed graph H, the problems H-INDUCED MINOR and H -CONTRACTIBILITYcan be solved in polynomial time for split graphs.
Proof. LetGbe a split graph onnvertices with maximal split partition (CG, IG). The
class of split graphs is closed under contractions and vertex deletions. Hence, ifH is not a split graph, thenHcannot be an induced minor or a contraction ofG. Assume that
H is a split graph with maximal split partition(CH, IH)whereCH ={x1, . . . , xp}
andIH={y1, . . . , yq}.
We start with theH-INDUCEDMINOR problem. Lemmas 1 and 2 tell us that we only have to guess a set of at most(p+ 1)(q+ 1)vertices inGand check if this set gives us anH-witness structure ofGsatisfying conditions (i)-(iii). BecauseHis fixed,
(p+ 1)(q+ 1)is a constant. Consequently, our guessed set has constant size, and the check can be done in polynomial time. If the answer is negative, we guess a different set until we have considered them all. There are at mostn(p+1)(q+1) different sets,
which is a polynomial number, because(p+ 1)(q+ 1)is a constant. We conclude that our algorithm runs in polynomial-time.
We now consider theH-CONTRACTIBILITYproblem and apply the following al-gorithm. First we guess a setS of at most(p+ 1)(q+ 1)vertices in G. Second we consider every possibility of placing the vertices ofSin witness bags to obtain anH -witness structure ofGsatisfying conditions (i)-(iii) such that every independent bag consists of exactly one vertex ofIG. If this is not possible, we try a different setS.
Now suppose that we have obtained such anH-witness structureWofG. We note that
Wdoes not have to satisfy condition (iv). Hence the setR=VG\Smay be nonempty.
We perform the following two steps. In the first step, we consider the vertices of
CG∩Rone by one and place them in the first clique bag that does not create any edges
between vertices of two bags that may not be adjacent. In the second step, we consider every vertex ofIG∩Rand place it in a clique bag that contains one of its neighbors. It
is possible that one of these steps fails; note that in the second step it may happen that a vertex ofIG∩Ris an isolated vertex ofG. Hence, in the case that we fail, we try to
form anotherH-witness structure ofGusing the vertices ofSas above, or a different setS. Otherwise we have found anH-witness structure of Gsatisfying conditions (i)-(iv).
BecauseHis fixed, we find that(p+ 1)(q+ 1)is a constant. Consequently, every guessed setS has constant size and we can process it in constant time. Also, the two steps afterwards can be performed in polynomial time for each setS. Because the total number of different setsSis at mostn(p+1)(q+1), we conclude that our algorithm runs
in polynomial time.
will detect anH-witness structure ofGifGcontainsHas a contraction. We show this below.
Suppose thatGcontainsH as a contraction. This means thatGhas anH-witness structure that satisfies conditions (i)-(iv). Then, by Lemma 1, we find thatGhas an
H-witness structureW satisfying conditions (i)-(iv), in which every independent bag consists of exactly one vertex ofIG. BecauseW satisfies conditions (i)-(iii), we find
thatGhas anH-witness structure W0 satisfying conditions (i)-(iii) that has order at most(p+ 1)(q+ 1)and that is a substructure ofW, due to Lemma 2. BecauseW0
is a substructure ofW, every independent bag ofW0consists of a single vertex from IG. At some point during its execution, our algorithm will detect the corresponding set
Sand the possibility of placing its vertices in bags such thatW0 is obtained. It will
then find aH-witness structure ofGthat satisfies conditions (i)-(iv) by considering the vertices inR =VG\S in the way we described. Note that thisH-witness structure
may not be equal toW, because the vertices inRmay be placed in different clique bags thanW; the existence ofWguarantees however that this can be done. This completes the proof of Theorem 6.
We letPk denote the path onkvertices. A graph is calledPk-freeif it contains
no induced subgraph isomorphic toPk. We observe that split graphs areP5-free. For
induced topological minors we can show the following.
Theorem 7. For any fixed integerk ≥ 1 and any fixed graphH, theH-INDUCED
TOPOLOGICALMINORproblem can be solved in polynomial time forPk-free graphs.
Proof. LetGbe aPk-free graph onnvertices. BecauseGisPk-free, every edge ofH
corresponds to a path on at mostk−1vertices in any induced subgraphG0ofGthat is isomorphic to a subdivision ofH. Taking into account isolated vertices ofH as well, we then find thatG0has at most`=|VH|+(k−1)|EH|vertices. We guess the vertices
ofG0and check if they induce a subdivision ofH. The latter can be done in constant time, because the number of vertices ofG0 is bounded by`, which is a constant as
H andkare assumed to be fixed. Because the total number of guesses is at mostn`,
which is a polynomial number for the same reason, this means that our algorithm runs in polynomial time.
Corollary 1. For any fixedH, theH-INDUCEDTOPOLOGICALMINORproblem can be solved in polynomial time for split graphs.
5
The Proof of Theorem 3
The problems SPANNINGSUBGRAPHISOMORPHISMand GRAPHISOMORPHISMare trivially fixed-parameter tractable for ordered pairs(G, H)whereGandH are arbi-trary graphs, and|VH|is the parameter. Recall that Robertson and Seymour [24] and
Grohe, Kawarabayashi, Marx, and Wollan [16] showed that MINORand TOPOLOGI
-CALMINOR, respectively, are fixed-parameter tractable for such pairs and parameter. We show in Theorem 8 that MINOR, SUBGRAPHISOMORPHISM, and TOPOLOGICAL
and|VH|is the parameter. In Theorem 9 we show that the DISSOLUTIONproblem
has a kernel of polynomial size even for general graphs. We show in Theorem 10 that INDUCEDMINOR, INDUCEDTOPOLOGICALMINORand INDUCEDSUBGRAPH
areW[1]-hard for ordered pairs(G, H)whereGandH are split graphs, and|VH|is
the parameter. In Theorem 11 we show the same result for the CONTRACTIBILITY
problem.
For the first result in this section, we use the following terminology. Two non-adjacent vertices in a graphGare calledtwinsif they share the same neighbors. An independent set of vertices inGis atwin setif any two vertices from this set are twins.
Theorem 8. The problems MINOR, TOPOLOGICAL MINOR and SUBGRAPH ISO
-MORPHISMhave a kernel of size |VH|+|VH|2|VH|for ordered pairs(G, H)where
Gis a split graph.
Proof. LetGbe a split graph andH be an arbitrary graph onkvertices. Suppose that
|CG| ≥k. ThenG[CG]includesH as a subgraph, and consequently, as a topological
minor and as a minor.
Suppose that|CG|< k. LetT ⊆IGbe a twin set. If|T|has more thankvertices
we remove|T| −kvertices fromGfor the following reason. IfGcontains a subgraph
H0 isomorphic toH, thenH0 contains at mostktwin vertices fromT, asH has at mostkvertices. IfGcontainsH as a minor, then we may assume that each bag in a correspondingH-witness structure contains at most one vertex fromT; we can remove any extra vertex ofTfrom a bag without violating conditions (i) and (ii). IfGcontains
Has a topological minor, thenGcontainsHas a minor as well. Hence, we may apply the above reduction rule in this case as well. We apply it on each of the at most2|CG|
twin sets inIG after detecting these twin sets in polynomial time. Then, for all three
problems, the resulting graph has at most|CG|+k2|CG|< k+k2kvertices.
A path in a graphGbetween two verticesuandvthat each have degree not equal to two inGis a2-pathif all vertices on the path exceptuandvhave degree two inG. Whenu=vwe speak of a2-cycleinstead. Thelengthof a path or cycle is its number of edges. A connected component of a graphGis called acycle componentofGif it is a cycle. We make the following observation, which immediately follows from our assumption that we only consider finite graphs.
Observation 1. Every vertex of a graph that contains no cycle components and no isolated vertices lies on a 2-path or a 2-cycle.
A graph isemptyif it is isomorphic to the empty graph(∅,∅). The DISSOLUTION
problem allows a polynomial kernel for general graphs.
Theorem 9. TheDISSOLLUTIONproblem has a kernel of size2|VH|2.
Proof. IfGandH have a different number of isolated vertices, thenH is not a disso-lution ofG. Otherwise, we remove all isolated vertices from both graphs. Hence, from now on, we assume thatGandHdo not contain any isolated vertices.
We writeH as the disjoint unionH = H1∪H2whereH1 consists of all cycle
can be empty. We writeG=G1∪G2, accordingly. Because a subdivision of a cycle
component is a cycle,GcontainsHas a dissolution if and only ifG1containsH1as a
dissolution andG2containsH2as a dissolution.
Due to the above, we first check if the number of cycle components inG1is equal
to the number of cycle components inH1. If not, thenH1is not a dissolution ofG1.
Otherwise, letrbe the maximum length over all cycle components inH1; if H1 is
empty, then we letr= 0. Suppose thatr≥1. In every cycle componentCofG1on
more thanrvertices, we can dissolve|VC| −rvertices. This leads to a graphG01on at
mostr|VH1| ≤ |VH1|
2vertices. Suppose thatr= 0. ThenH
1andG1are empty, and
we letG01be the empty graph as well. Hence,G1containsH1as a dissolution if and
only ifG01containsH1as a dissolution.
We now check ifG2andH2have the same number of vertices of degree not equal
to two. If not, thenH2is not a dissolution ofG2. Otherwise, we do as follows. Letp
be the total number of 2-paths and 2-cycles inH2. Letqbe the maximum of vertices
in any 2-path or 2-cycle inH2. IfH2is empty, thenp= 0and we letr= 0as well.
IfH2is not empty, then we use Observation 1 to find thatp ≥1, and consequently,
r≥1.
We check if the total number of 2-paths and 2-cycles inG2 is larger thanp. If
so, thenH2 is not a dissolution ofG2. Suppose that the total number of 2-paths and
2-cycles inG2is not larger than p. If G2 has a 2-path or 2-cycle containings > q
vertices, we dissolves−qof such vertices. Applying this rule exhaustively results in a graphG02such thatG2 containsH2as a dissolution if and only ifG02 containsH2
as a dissolution. By Observation 1 and our reduction rule we find thatG02has at most
pq≤ |VH2|
2vertices.
Summarizing,H is not a dissolution ofGifH1 orH2is not a dissolution ofG1
orG2, respectively. Otherwise, we have found a graphG0 = G01∪G02with at most
|VG1|+|VG2| ≤ |VH1|
2+|V
H2|
2≤ |V
H|2vertices, such thatH is a dissolution ofG
if and only ifHis a dissolution ofG0. This completes the proof of Theorem 9. In the remainder of this section we show that we getW[1]-hardness when the con-tainment is required to be induced.
Theorem 10. The problemsINDUCEDMINOR,INDUCEDTOPOLOGICALMINORand INDUCED SUBGRAPHareW[1]-hard for ordered pairs(G, H)whereGandH are split graphs, and|VH|is the parameter.
Proof. We use the same reduction as in the proof of Theorem 5, namely from the CLIQUEproblem, which asks whether a graph has a clique of size at leastk. This problem isW[1]-complete when parameterized byk(cf. Downey and Fellows [9]).
We letK1onGdenote the graph obtained from a graphGafter adding a new vertex and making it adjacent to all vertices ofG.
Lemma 3([17]). LetH andGbe two graphs. ThenGhasH as an induced minor if and only ifK1onGis(K1onH)-contractible.
We observe thatK1 on Gis a split graph ifGis a split graph. Then, combining Lemma 3 with Theorem 10 yields the following result.
Theorem 11. TheCONTRACTIBILITYproblem isW[1]-hard for ordered pairs(G, H)
whereGandHare split graphs, and|VH|is the parameter.
6
Conclusions
In Theorems 1–3 we settle the computational complexity of finding (induced) mi-nors, (induced) topological mimi-nors, (induced) subgraphs, (induced) spanning sub-graphs, dissolutions and contractions in split graphs. Our research was motivated by a similar study for a superclass of split graphs, namely the class ofchordalgraphs, i.e., graphs that contain no cycle on four or more vertices as an induced subgraph. Very recently, Belmonte et al. [1] showed that for any fixed graph H, the prob-lemsH-CONTRACTIBILITYandH-INDUCED MINOR are polynomial-time solvable on chordal graphs. On the contrary, we observed in another recent paper [14] that for any fixed graph, the problems H-SUBGRAPH ISOMORPHISM, H-MINOR, H
-TOPOLOGICALMINORcan be solved in linear time for chordal graphs.
Because split graphs form a subclass of the class of chordal graphs, the W [1]-hardness results in Theorem 3 carry over to chordal graphs. Hence, the aforementioned polynomial-time results of Belmonte et al. [1] can be considered as best possible for chordal graphs, and it is natural to consider other subclasses of chordal graphs such as interval graphs and proper interval graphs. A graph is aninterval graphif intervals of the real line can be associated with its vertices in such a way that two vertices are adjacent if and only if their corresponding intervals overlap. An interval graph isproper intervalif it has an interval representation, in which no interval is properly contained in any other interval. It may be interesting to undertake a study on containment relations for these two classes of graphs. In particular, we pose the following two open problems. 1. Is CONTRACTIBILITYW[1]-hard for ordered pairs(G, H)whereGandH are
intervals, and|VH|is the parameter?
2. Is CONTRACTIBILITYfixed-parameter tractable for ordered pairs(G, H)where
GandHare proper intervals, and|VH|is the parameter?
Acknowledgments. We thank the anonymous referees for their useful comments that helped us to improve the readability of our paper.
References
[1] R. Belmonte, P.A. Golovach, P. Heggernes, P. van ’t Hof, M. Kaminski and D. Paulusma, Finding contractions and induced minors in chordal graphs via disjoint paths, In: Proceedings of the 22nd International Symposium on Algorithms and Computation (ISAAC 2011),Lecture Notes in Computer Science, to appear. [2] R. Belmonte, P. Heggernes, and P. van ’t Hof. Edge contractions in subclasses of
chordal graphs. In: Proceedings of the 8th Annual Conference on Theory and Ap-plications of Models of Computation (TAMC 2011).Lecture Notes in Computer Science6648, 528–539, 2011.
[3] K.S. Booth and C.J. Colbourn. Problems polynomially equivalent to graph iso-morphism. Technical Report CS-77-04, Computer Science Department, Univer-sity of Waterloo, 1979.
[4] A. Brandst¨adt, V.B. Le, and J. Spinrad. Graph Classes: A Survey. SIAM Mono-graphs on Discrete Mathematics and Applications, 1999.
[5] A.E. Brouwer and H.J. Veldman. Contractibility andNP-completeness. Journal of Graph Theory, 11: 71–79, 1987.
[6] P. Damaschke. Induced subgraph isomorphism for cographs is NP-complete. In: Proceedings of the 16th International Workshop on Graph-Theoretic Concepts in Computer Science Graph-Theoretic Concepts in Computer Science (WG 1990), Lecture Notes in Computer Science484, 72-78, 1990.
[7] R. Diestel. Graph Theory. Springer-Verlag, Electronic Edition, 2005.
[8] M.R. Garey and D.S. Johnson. Computers and Intractability: A Guide to the The-ory of NP-Completeness, Freeman, San Francisco, 1979.
[9] R. G. Downey and M. R. Fellows, Parameterized complexity, Monographs in Computer Science, Springer-Verlag, New York, 1999.
[10] M.R. Fellows, J. Kratochv´ıl, M. Middendorf, and F. Pfeiffer. The Complexity of Induced Minors and Related Problems.Algorithmica, 13: 266–282, 1995. [11] J. Fiala, M. Kami´nski, B. Lidick´y, and D. Paulusma. Thek-in-a-path problem for
claw-free graphs.Algorithmica, to appear.
[12] J. Flum and M. Grohe. Parameterized Complexity Theory, volume XIV ofTexts in Theoretical Computer Science. An EATCS Series. Springer Verlag, 2006. [13] S. Foldes, P. L. Hammer. Split graphs. Proceedings of the Eighth Southeastern
Conference on Combinatorics, Graph Theory and Computing (Louisiana State Univ., Baton Rouge, La., 1977), pp. 311315.Congressus Numerantium, No. XIX, Utilitas Math., Winnipeg, Man., 1977.
[14] P.A. Golovach, M. Kaminski and D. Paulusma, Contracting a chordal graph to a split graph or a tree, Proceedings of the 36th International Symposium on Math-ematical Foundations of Computer Science (MFCS 2011)Lecture Notes in Com-puter Science6907, 339-350, 2011.
[15] M.C. Golumbic. Algorithmic Graph Theory and Perfect Graphs. Annals of Dis-crete Mathematics 57, Elsevier, 2004.
[16] M. Grohe, K. Kawarabayashi, D. Marx and P. Wollan, Finding topological minors is fixed-parameter tractable, In: Proceedings of the 43rd ACM Symposium on Theory of Computing (STOC 2011), 479–488, 2011.
[17] P. van ’t Hof, M. Kami´nski, D. Paulusma, S. Szeider and D.M. Thilikos. On graph contractions and induced minors.Discrete Applied Mathematics, to appear.
[18] M. Kami´nski, D. Paulusma and D.M. Thilikos. Contractions of planar graphs in polynomial time. In: Proceedings of the 18th Annual European Symposium on Algorithms (ESA 2010).Lecture Notes in Computer Science 6346, 122–133, 2010.
[19] B. L´evˆeque, D.Y. Lin, F. Maffray, and N. Trotignon. Detecting induced sub-graphs.Discrete Applied Mathematics157(2009) 3540–3551.
[20] A. Levin, D. Paulusma, and G.J. Woeginger. The computational complexity of graph contractions I: polynomially solvable andNP-complete cases. Networks, 51: 178–189, 2008.
[21] A. Levin, D. Paulusma, and G.J. Woeginger. The computational complexity of graph contractions II: two tough polynomially solvable cases.Networks, 52: 32– 56, 2008.
[22] J. Matouˇsek and R. Thomas. On the complexity of finding iso- and other mor-phisms for partialk-trees.Discrete Mathematics, 108: 343–364, 1992.
[23] R. Niedermeier, Invitation to Fixed-Parameter Algorithms, Oxford Lecture Series in Mathematics and its Applications. Oxford University Press, 2006.
[24] N. Robertson and P.D. Seymour. Graph minors. XIII. The disjoint paths problem. Journal of Combinatorial Theory, Series B, 63: 65–110, 1995.