Observer Based on Sliding Mode Control for Ship
Dynamic Positioning
Dr. Diallo Thierno Mamadou Pathe
Pr. Diallo Saliou Kabi
Abstract – The ship dynamic positioning is a new
technology for positioning and orientation applied to the ship or floating platform, which can resist to the influence of offshore wind, wave, and flow by automatically keeping the setting position. The sliding mode is the way for simple and robust control for automatic systems. In most cases, the only available system variables are the input and output; it is necessary from those information’s, to reconstruct the state of the model to perform the control. In this paper we propose an observer based on sliding mode control for the ship dynamic positioning.
Keywords – Control, Dynamic Positioning, Observer, Ship
Model, Sliding Mode.
I.
I
NTRODUCTIONMany methods of process control use the principle of state feedback (optimal control, decoupling, pole placement, etc.). As in most cases, the only available system variables are the input and output; it is necessary from such information, to reconstruct the state of the model to perform the control. A state reconstructor or estimator is a system (Fig. 1) having as inputs, the inputs and outputs of the real process and the output is an estimate of the state of the process.
Fig. 1. Principle of an observer
Under the assumption of linearity of the process model, the basic structure of the estimator is always the same, but its realization will depend on the chosen context: continuous or discrete, deterministic or stochastic. In the case where this model is a deterministic model, the state reconstructor will be called observer. In the case of noisy systems where random phenomena occur, it is called filter. The use of an observer can be seen in monitoring, diagnosis, and control.
A.
Monitoring
Monitoring includes the measurement of the value of a particular parameter and also the follow-up into variations in its value (so as to allow the true value of the parameter to be controlled within a required range). Occasionally, monitoring may refer to the simple surveillance of a parameter without numerical values. The monitoring is the periodic oversight in the implementation of an activity, intervention, project or program. It seeks to establish if inputs, processes and outputs are proceeding according to
plan. It includes the regular collection and analysis of data to assist timely decision-making, ensure accountability and provide the basis for evaluations and learning. Monitoring is an internal function in any project or organization.
B.
Diagnosis
Fault diagnosis involves different steps (detection, isolation, estimation) to provide increasing knowledge about the fault. The term diagnosis is commonly used when at least the first two tasks (detection, isolation) are accomplished. Fault diagnosis is based on available input/output signals of the process [1].
C.
Control
The control system consists of a controlled equipment (system) and a controlling system. The controlled system is an independent, existing equipment, machine, which is the object of the control. The controlling system is a set of each equipments by which the control is done [2].
Automation or automatic control is the use of various control systems for operating equipment such as machinery, processes in factories, steering and stabilization of ships, aircraft and other applications with minimal or reduced human intervention.
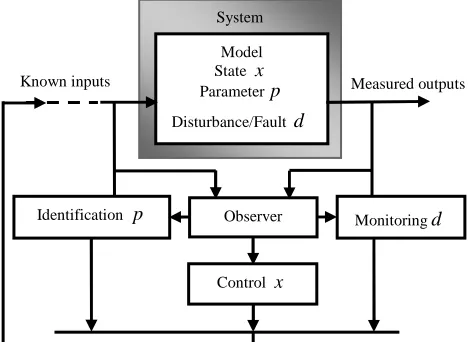
In general indeed, due to sensor limitations (for cost reasons, technological constraints, etc.), the directly measured signals do not coincide with all signals characterizing the system behavior. Those signals of interest roughly include time-varying signals characterizing the system (state variables), constant ones
(parameters), and unmeasured external ones
(disturbances). This need for internal information can be motivated by various purposes: modeling (identification), monitoring (fault detection), or driving (control) the system, all these being required for keeping a system under control, as summarized by figure (Fig. 2) hereafter.
Fig. 2. Observer as the heart of control systems
Process
State model x Outputs
Inputs xˆestimate of x
Reconstructor
System Model State x Parameterp Disturbance/Fault d
Observer Monitoringd
Control x Identification p
Copyright © 2016 IJECCE, All right reserved This makes the reconstruction – or observer – problem
the heart of a general control problem [3].
The main techniques for synthesis of nonlinear observers are: observer’s canonical form, high gain observers, adaptive observer, observers by extended linearization, observers by optimization, and sliding mode observers. In this paper, a sliding mode observer is proposed for the ship dynamic positioning.
Sliding mode observer is a high performance state estimator which is well suited for uncertain nonlinear systems with partial state feedback [4], [5]. The sliding function of this observer is estimation error of the available output. The basic sliding mode observer consists of switching terms added to a conventional Luenberger observer [6].
II.
M
ATHEMATICALM
ODEL OF THES
HIP FORDP
(D
YNAMICP
OSITIONING)
The mathematical description of a system’s behavior is given by a model. When designing a control system, modern development in control theory has lead to an increased use of model knowledge. The best model is one that is accurate and descriptive enough, yet not too complex to implement or develop. Marine mechanics is a well-known field and a model is derived based on Newtonian and Lagrangian mechanics combined with a semi-empiric evaluation of hydrodynamic forces [7].
A.
Formulation of Ship Model for DP
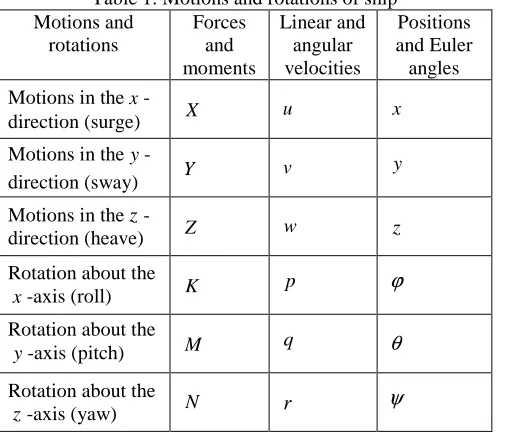
For marine vehicles, the six different motion components are conveniently defined as (Table 1): surge (the linear longitudinal “front/back” motion), sway (the linear lateral “side-to-side” motion), heave (the linear vertical “up/down” motion), roll (the rotation of a vessel about its longitudinal “front/back” axis), pitch (the rotation of a vessel about its transverse “side-to-side” axis), and yaw (the rotation of a vessel about its vertical axis).
Table 1. Motions and rotations of ship Motions and
rotations
Forces and moments
Linear and angular velocities
Positions and Euler angles Motions in the x
-direction (surge) X u x
Motions in they
-direction (sway) Y v
y
Motions in thez
-direction (heave) Z w z
Rotation about the
x -axis (roll) K p ϕ
Rotation about the
y -axis (pitch) M q θ
Rotation about the
z-axis (yaw) N r ψ
For the analyses of the motion, it is convenient to define two coordinate frames as indicated in the figure (Fig. 3).
Fig. 3. Body fixed and earth fixed reference frame
The body fixed frame RG=
{
G,X0,Y0,Z0}
is fixed to the vessel and the originG is usually chosen to be thecenter of gravity of the vessel; R0 =
{
O,X,Y,Z}
is the earth-fixed reference frame. Based on the Euler’s theorem on rotation, the kinematic equations relating the body fixed reference frame to the earth-fixed reference frame can be expressed in vector for as:( )
ηυηɺ=J (1)
whereJ is the transformation matrix given by:
( )
( )
( )
( )
( )
−
=
1 0 0
0 cos sin
0 sin cos
ψ ψ
ψ ψ
η
J (2)
The vector υ=
[
u v w p q r]
denotes the linear velocities in surge, sway and heave, and the angular velocities in roll, pitch and yaw, decomposed in the body fixed frame.The position and orientation angles are gathered in a vector ηsuch that in the earth-fixed frame we have:
[
x y zϕ
θ
ψ
]
Tη
= (3)The nonlinear six degrees-of-freedom body-fixed coupled equations of the motions in surge, sway, heave, roll, pitch and yaw are written as follows [7], [8], [9]:
( )
D( )
G( )
thr env CM
υ
ɺ+υ
υ
+υ
υ
+η
=τ
+τ
(4) where M is the added mass due to the inertia of the surrounding fluid, D is the hydrodynamic damping matrix,Cis the coriolis and centripetal matrix, Gis the vector of gravitational and buoyant forces and moments, τthrthe control forces, and τenvthe environmental disturbances.
In dynamic positioning it has been adequate to regard the control objective as the three degree of freedom problem in the horizontal plane in surge, sway and yaw
0
G
0
Y
0
X 0
Z Pitch
Sway
Surge
Roll Heave
Yaw
Y
X Z
respectively. The coriolis and centrifugal matrices for the added mass and the rigid body can also be crossed out of the equation because in low speed applications, quadratic velocity terms are negligible. The gravitational forces are not included either due to the inexistence of forces coupled to the dynamics. The dynamic equation (4) is therefore simplified to:
( )
thr envD
Mυɺ+ υυ=τ +τ (5)
with η =
[
x y ψ]
Tand υ=[
u v r]
By taking τthr+τenv=τ, the equation (5) becomes:
( )
υυ τυ+D =
Mɺ (6)
So the reduced equations of motion of Ship dynamic positioning (DP) in surge, sway and yaw can be expressed as follows [12]:
( )
= = + υ η η τ υ υ J D M ɺ ɺ (7)B.
State Space Representation of the Ship Model
From the successive derivative of ηand the change of variablesx1=η, x2=xɺ1and x3 =xɺ2the system (7) can be
represented in state space as:
+ = + − + + = = = − − U B f B x A B B A x B B A x x x x x 2 2 2 1 3 1 3 3 2 2 1 ] [ ] [ ɺ ɺ ɺ τɺ ɺ ɺ ɺ (8)
withA=[Jɺ−JM−1D]J−1, B=JM−1=B2, τɺ=U,
2 1 3
1
2 [A BB ]x [A BB A]x
f = + ɺ − + ɺ− ɺ − ,x1=η =[x,y,
ψ
]T,1
2 x
x = ɺ , andx3 =xɺ2.
By choosing the new change of variablesx=X1,y=Y1, andψ =Z1with their successive corresponding derivatives
2
1 X
Xɺ = , Xɺ2=X3, Yɺ1=Y2, Yɺ2 =Y3, Zɺ1=Z2, and
3
2 Z
Zɺ = , the system (8) becomes:
( ) ( )
+ = = = X U X B X f Z Y X Z Y X Z Y X Z Y X Z Y X 2 2 3 3 3 3 3 3 2 2 2 2 2 2 1 1 1 ) ( ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ (9)[
]
TZ Y
X f f
f X
f2( )= 2 2 2
III.
S
LIDINGM
ODEO
BSERVERA
PPLIED TO THES
HIPSeveral structures of observers are possible for the estimation of the state of the system model [10], [11], [12], [13]. In this part, the so called sliding mode triangular observer is proposed.
A.
Lemma
For the system model defined in (9), the sliding mode observer which makes the observing errors tend to zeros in finite time can be written as:
(
)
(
)
(
)
(
)
(
)
(
)
( ) ( )
(
(
)
)
(
)
− − − Λ + + = − − − Λ + = − − − Λ + = 3 3 3 3 3 3 3 2 2 3 3 3 2 2 2 2 2 2 2 3 3 3 2 2 2 1 1 1 1 1 1 1 2 2 2 1 1 1 ˆ ˆ ˆ ) ( ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ Z Z sign Y Y sign X X sign X U X B X f Z Y X Z Z sign Y Y sign X X sign Z Y X Z Y X Z Z sign Y Y sign X X sign Z Y X Z Y X ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ (10) with Λ Λ Λ = Λ iZ iY iX i 0 0 0 0 0 0, i=1,2,3
B.
Proof
From the system (10), the dynamic of the observer error
i i
iR R R
E = − ˆ (with E1R =R1−Rˆ1, R1=R1,
(
1 1)
) 1 ( ˆ ˆ − − − − Λ +
= i i R i i
i R signR R
R , i=2,3, and
Z Y X
R= , , ) is:
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
− Λ − − = − Λ − = − Λ − = − Λ − − = − Λ − = − Λ − = − Λ − − = − Λ − = − Λ − = 3 3 3 2 2 3 2 2 2 3 2 1 1 1 2 1 3 3 3 2 2 3 2 2 2 3 2 1 1 1 2 1 3 3 3 2 2 3 2 2 2 3 2 1 1 1 2 1 ˆ ) ( ) ( ˆ ˆ ˆ ) ( ) ( ˆ ˆ ˆ ) ( ) ( ˆ ˆ Z Z sign X f X f E Z Z sign E E Z Z sign E E Y Y sign X f X f E Y Y sign E E Y Y sign E E X X sign X f X f E X X sign E E X X sign E E Z Z Z Z Z Z Z Z Z Z Y Y Y Y Y Y Y Y Y Y X X X X X X X X X X ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ (11)Step1: For the convergence of E1Rin finite time we
consider a Lyapunov functionV1=E12R/2
(
)
(
2 1 1 1)
1 1 1
1 E E E E signR Rˆ
Vɺ = Rɺ R= R R−ΛR −
max 2 1
1 0 R E R
Copyright © 2016 IJECCE, All right reserved By choosing Λ1R > E2R maxwe obtain the convergence
ofE1Rafter a finite timet1toward zero.
After t1, the state reaches the sliding surface and on this
surface, we have E1R=Eɺ1R =0 then we have: R2=R2. Step 2: while respecting the condition of convergence of the first step; let’s show the convergence of E2Rin
finite time.
By replacing R2 =R2 one gets: Eɺ2R=E3R−
( )
R Rsign E2 2Λ .
Let choose the Lyapunov function V2=
(
E12R+E22R)
/2 one has after t1, E1R =0from where:( )
(
R R R)
R R
RE E E signE
E
Vɺ2= 2 ɺ2 = 2 3 −Λ2 2
max 3 2
2 0 R E R
Vɺ ≤ ⇔Λ >
By choosing Λ2R > E3Rmaxwe obtain the convergence of E2Rafter a finite time t2 >t1 toward zero.
After t2, the state reaches the sliding surface and on
this surface, we have E2R=Eɺ2R=0from where we got:
3
3 R
R = .
Step 3: By respecting the conditions of convergence of the first and the second step; let show the convergence of
R
E3 in finite time.
While replacing R2=R2, R3=R3one gets:
( )
R RR signE
Eɺ3 =−Λ3 3
We choose the Lyapunov function:
(
12 22 32)
/23 ER E R E R
V = + + , after t2, E1R =E2R =0 from where:
( )
(
R R)
R R
RE E signE
E
Vɺ3 = 3 ɺ3 = 3 −Λ3 3
0
0 3
3< ⇔Λ R>
Vɺ
By choosing Λ3Rin the vicinity of zero we obtain the convergence of E3Rafter t3>t2.
IV.
S
LIDINGM
ODEC
ONTROLLERA
PPLIED TO THES
HIPIn the precedent section, we have show the convergence of observer error that means after a finite time we have:
i
i R
R = ˆ . Now, let take the dynamic tracking error ri
i
iR R R
e = ˆ − whereRriis the desired trajectory. By taking e1=
[
e1X e1Y e1Z]
T, e2 =eɺ1,[
]
TZ Y
X e e
e
eɺ1= 2 2 2 , and
[
]
T Z Y
X e e
e e
e3 =ɺ2 = 3 3 3
we can define the sliding surface as: σ =e3+K
[
e1 e2]
TA.
Theorem
For system model (10), the sliding mode controller which makes the tracking errors tend asymptotically to zeros in finite time is:
r eq U
U
U= + (12)
where Ueq=−B2−1
β
is the equivalent control, and )(
1 2 signσ
B Ur
−
−
= is the robust control term with
[
]
(
(
)
)
(
)
− − − Λ + − + = 3 3 3 3 3 3 3 2 2 2 2 3 2 ˆ ˆ ˆ ) ( Z Z sign Y Y sign X X sign Z Y X X f e e K r r r T ɺ ɺ ɺ β .B.
Proof
Step 1: The equivalent control law. On the sliding surface we have:
( ) ( )
X,t =σ X,t =0σ ɺ
The first derivative with respect to t of σ is done:
( )
[
]
[
]
[
]
[
]
T[
]
Tr r r T T T r r r T T Z Y X e e K Z Y X Z Y X e e K Z Z Y Y X X e e K e e e e e K e t X 3 2 3 3 3 3 3 3 3 2 3 3 3 3 3 3 3 2 3 3 3 3 2 3 ˆ ˆ ˆ ˆ ˆ ˆ , + − = + − − − = + = + = ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ ɺ σ
( )
− = ⇒ = 3 2 3 3 3 3 33 ˆ ˆ
ˆ 0 , e e K Z Y X Z Y X t X r r r T ɺ ɺ ɺ ɺ ɺ ɺ ɺ σ
( ) ( )
(
(
)
)
(
)
− − − Λ + + = 3 3 3 3 3 3 3 2 2 ˆ ˆ ˆ ) ( Z Z sign Y Y sign X X sign X U X B X f eq( )
X B( )
Xβ
Ueq =− 2−1
⇒ with
(
)
(
)
(
)
− + − − − Λ + = 3 3 3 3 2 3 3 3 3 3 3 3 2 ˆ ˆ ˆ ) ( r r r Z Y X e e K Z Z sign Y Y sign X X sign X f ɺ ɺ ɺ βStep 2: The robust control law. Let consider the candidate Lyapunov function V :
σ σ σ σ σ σ σ
σT Vɺ ɺT Tɺ Tɺ
V =( )/2⇒ =( + )/2=
[
]
+ − = 3 2 3 3 3 3 33 ˆ ˆ
ˆ e e K Z Y X Z Y X
V r r r T
T
T ɺ ɺ ɺ ɺ ɺ ɺ
( )
( )
(
)
(
(
)
)
(
)
+
−
− −
− Λ
+ + +
=
3 2
3 3 3
3 3
3 3
3 3
3 2
2
ˆ ˆ
ˆ
e e K
Z Y X
Z Z sign
Y Y sign
X X sign
U U X B X f
r r r
r eq
T
ɺ ɺ ɺ σ
Replacing Ueqby its value in the precedent equation
we gotVɺ=
σ
T(
B2( )
X Ur)
; assumingUr =−B2−1sign(σ), the function Vɺ=−σ
Tsign(σ
)≤0.
V.
S
IMULATIONR
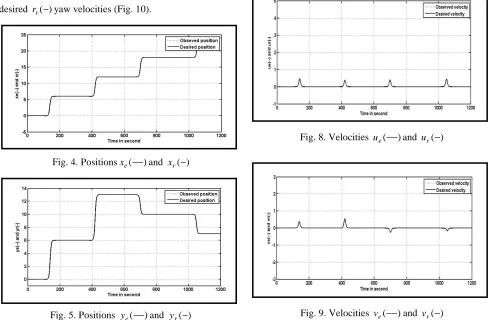
ESULTSThe numerical parameters of the model, the desired positions, linear velocities, angular velocity, and the values of H and K can be founds in our previous work [14]. The values ofΛ1=0 I.9 3, Λ2 =0 I.7 3,
Λ
3=
0 I
.
1
3, where I is the identity matrix. The following figures 3shows respectively the observed xe(−−), ye(−−) and the desired xr(−), yr(−) positions (Fig. 4, Fig. 5); the observed ψe(−−)and the desired ψr(−)yaw angles (Fig. 6); the observed positiony in function of e x (Fig. 7); the e
observed ue(−−),
v
e(
−−
)
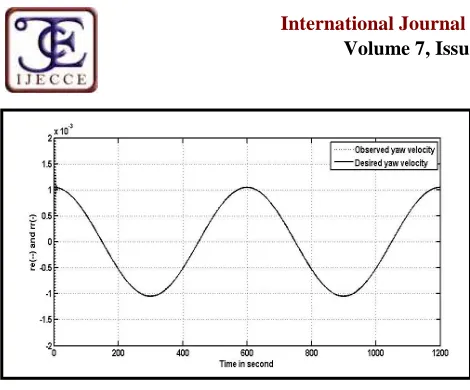
and desired ur(−), vr(−) velocities (Fig. 8, Fig. 9); the observed re(−−)and the desired rr(−)yaw velocities (Fig. 10).Fig. 4. Positionsxe(−−)and xr(−)
Fig. 5. Positions ye(−−)and yr(−)
Fig. 6. Yaw angles ψe(−−)and ψr(−)
Fig. 7. Position y in function of e x e
Fig. 8. Velocities ue(−−)and ur(−)
Copyright © 2016 IJECCE, All right reserved Fig. 10. Yaw velocities re(−−)and rr(−)
VI.
C
ONCLUSIONIn this work, we had studied the dynamic positioning of the ship by considering the uncertainties of the measures. For the reconstruction of the unmeasured states of the ship model, the sliding mode triangular observer is used. The simulations results show the good performance of the used techniques for our applications.
R
EFERENCES[1] Mogens Blanke. Blanke, “Enhanced Maritime Safety Through
Diagnosis and Fault Tolerant Control”, Proc. IFAC conference
CAMS'2001, 2001.
[2] Ildiko Mako, “Fundamentals of Automation”, Machine Tool Department , University of Miskolc. 1997.
[3] Gildas Besancon, “Observer Design for Nonlinear System”, A. Loria et al. (Eds.): Advanced topics in Control Systems Theory, LNCIS 328, PP. 61-89, Springer, 2006.
[4] Vadim I. Utkin, “Sliding modes in control and optimization”, Springer-Verlag, 1992.
[5] Moura J T, Elmali H, et al, “Sliding mode control with sliding
perturbation observer”, J Dynam System, Measurement Control,
Trans ASME 1997; 119(4): 657-665.
[6] L. Jiang, Q. H. Wu, C. Zhang, and X. X. Zhou, “Observer-based
nonlinear control of synchronous generators with perturbation estimation”, Electrical Power and Energy Systems 23 (2001)
359-367.
[7] Rajesh Kumar Verma, “Dynamic Positioning of Ship using
Direct Model Reference Adaptive Control”, Thesis of College of
Graduate Studies Texas A&M University-Kingsville, 2004. [8] Zhang Cheng-Du, Wang Xi-Huai, Xiao Jian-Mei, “Ship
Dynamic Positioning System based on Backstepping Control”,
Journal of Theoretical and Applied Information Technology, 10th May 2013. Vol. 51 No.1, pp 129-136.
[9] Wen-Jer Chang, Guo-Chang Cheng, and Yi-Lin Yeh, “Fuzzy
Control of Dynamic Positionning Systems for Ships”, Journal of
Marine Science and Technology, Vol. 10, No. 1, pp. 47 – 53, 2002.
[10] Thor I. Fossen and Tristan Perez, “Kalman Filtering for
Positioning and Heading Control of Ships and Offshore Rigs”,
IEEE Control Systems Magazine, 2009.
[11] A. Mehmood, S. Laghrouche and M. El Bagdouri, “Position
tracking of the VGT Single Acting Pneumatic Actuator with 2nd order SMC and Backstepping Control Techniques”, 12th IEEE
Workshop on Variable Structure Systems, VSS’12, January 12-14, Mumbai, 2012.
[12] Liu Furong, Chen Hui, Gao Haibo, “Application of Moving
Horizon Filter for Dynamic Positioning Ship”, Journal of Wuhan
University of Technology. 2010; .32(12): 117-120.
[13] Manuel Jimenez-Lizárraga, Michael Basin, Celeste Rodriguez, Pablo Rodriguez, “HOSM Observer for Robust Output Regulator
in Uncertain Nonlinear Polynomial Systems”, 12th IEEE
Workshop on Variable Structure Systems, VSS’12, January 12-14, Mumbai, 2012.
[14] Diallo Thierno Mamadou Pathe, Li Hongsheng, Bian Guangrong, “Switching Surface Design for Nonlinear Systems:
the Ship Dynamic Positioning”, TELKOMNIKA (2013) 11(4),
1801- 1808.
A
UTHOR’
SP
ROFILEDiallo Thierno Mamadou Pathe, native of Guinea was
born in 1976. He received the Bachelor degree of Physics in 2002 at the University Mohamed 1er Oujda, the Master degree of Automation and Information Processing in 2004 at the University Sidi Mohamed Ben Abdallah Fes (Morocco), and the Doctor degree of Engineering in Mechanical Manufacture and Automation in 2014 at Wuhan University of Technology (China).
In Guinea at the Centre Universitaire de Kindia he is a Lecturer since 2007, and 209-2010 Head of Division of Statistics, Documentation and Publication. June and July 2013 a Math’s lecturer at Wuhan University, China. He is currently an Assistant Professor. His research interests are control theories, signal analysis and information processing.
Dr. Diallo has been awarded by Wuhan University of Technology in 2013-2014 for the thesis “Digital Maintenance and Training of Digital Manufacturing” granted as the Outstanding Thesis Award for postgraduate students.
Diallo Saliou Kabi, native of Guinea was born in 1950.