BIROn - Birkbeck Institutional Research Online
Razgon, Igor (2015) On the read-once property of branching programs and
CNFs of bounded treewidth. Algorithmica 75 (2), pp. 277-294. ISSN
0178-4617.
Downloaded from:
Usage Guidelines:
Please refer to usage guidelines at
or alternatively
CNFs of bounded treewidth
Igor Razgon
Department of Computer Science and Information Systems, Birkbeck, University of London [email protected]
Abstract. In this paper we prove a space lower bound ofnΩ(k)for non-deterministic (syntactic) read-once branching programs (NROBPs) on functions expressible as
CNFs with treewidth at mostkof their primal graphs. This lower bound rules out the possibility of fixed-parameter space complexity ofNROBPs parameterized by
k.
We use lower bound forNROBPs to obtain a quasi-polynomial separation between Free Binary Decision Diagrams and Decision Decomposable Negation Normal Forms, essentially matching the existing upper bound introduced by Beame et al. and thus proving the tightness of the latter.
1
Introduction
1.1 Statement of results and motivation
Read-once Branching Programs (ROBPs) are a well known representation of Boolean functions. ObliviousROBPs, better known as Ordered Binary Decision Diagrams (OBDDs), are a subclass ofROBPs, very well known because of its applications in the area of ver-ification [3]. An important procedure in these applications is transformation of aCNF
formula into an equivalentOBDD. The resultingOBDDcan be exponentially larger than the initialCNFformula, however a space efficient transformation is possible for special classes of functions. For example, it has been shown in [7] that aCNF formula with treewidthkof its primal graph can be transformed into anOBDDof sizeO(nk). A nat-ural question is if the upper bound can be made fixed-parameter i.e. of the formf(k)nc for some constantc. In [14] we showed that it is impossible by demonstrating that for each sufficiently largekthere is an infinite class ofCNFformulas with treewidth at most
kwhose smallestOBDDis of size at leastnk/5.
In this paper we report a follow up result (Theorem 1) showing that essentially the same lower bound holds for non-deterministic read-once branching programs (NROBPs). 1In particular we show that there is a constant0< c <1such that for each sufficiently largekthere is an infinite class ofCNFformulas of treewidth at mostk(of their primal graphs) for which the space complexity of the equivalentNROBPs is at leastnck.
This result is a significant enhancement of the result of [14]. Indeed,OBDDs are a subclassROBPs and there isexponential separationbetween the classes (that is, there is
1
Throughout this paper, we assume the read-once property to besyntactic, that is applied toall
root-leaf paths of the considered branching programs. See Section 2 for the exact definitions.
a family of functions that can be represented by poly-sizeROBPs but require exponential sizeOBDDs). AROBP, in turn, is a special case of (NROBP) and there is an exponential
separation between ROBPs and NROBPs ([16], Corollary 10.2.3). Thus the proposed result shows that read-once branching programs are inherently incapable to efficiently computeCNFformulas of bounded treewidth.
We also demonstrate that the proposed result can be used in the non-parameterized context. In particular, using this result, we provide a quasi-polynomial separation be-tweenNROBPs and a subset of decomposable negation normal forms (DNNFs) [4] known as decision-DNNF. More precisely, we demonstrate a family ofCNFformulas that can be expressed as decisionDNNFs of sizeO(n5)but the space complexity of
NROBPs is
nΩ(logn). The motivation for this result is described below.
DNNFis a representation of Boolean functions well known in the areas of knowl-edge representation and databases.DNNFs are much more succinct thanROBPs. In fact aROBP can be seen as a special case ofDNNF [6] and there is an exponential sepa-ration between these two representations. Like in the case of OBDDs, transformation from aCNFformula to an equivalentDNNFis an important operation in the related ap-plications. One remarkable property ofDNNFs is theirFPTspace complexity onCNFs formulas with bounded treewidth. In particular, aCNFformula with treewidthkcan be transformed into aDNNFof sizeO(2kn). In fact this property is preserved for a number of restrictedDNNFsubclasses, one of them is known as decision-DNNF[12]. Interest-ingly, the possibility of exponential separation fromROBPis not preserved for
decision-DNNFs: it has been shown in [1] that a decision-DNNFof sizeN can be simulated by aROBPof sizeO(NlogN). Our result shows that this upper bound is essentially tight. Indeed, since ROBP is a special case of NROBP, this result implies quasi-polynomial separation betweenROBPand decision-DNNF, essentially matching the upper bound of [1].
We believe the proposed parameterized lower bound is interesting from the pa-rameterized complexity theory perspective because it contributes to the understanding of (concrete) parameterized space complexity of various representations of Boolean functions. We see at least two reasons why this research direction is worth to explore. First, the results of of this kind are closely related (through substitution of the param-eters with appropriate functions ofn) to the classical, non-parameterized complexity of Boolean function. For example, the famous result of Razborov providing the first non-polynomial lower bound for the space complexity of monotone circuits can be seen formulated in the parameterized setting as a spacen
√
klower bound for monotone
circuits testing whether the given graph has a clique of sizek[10].
1.2 Overview of the proofs
To prove the proposed parameterized lower bound, we use monotone2-CNFformulas (their clauses are of form(x1∨x2)wherex1 andx2are2distinct variables). These
CNFformulas are in one-to-one correspondence with graphs having no isolated vertices: variables correspond to vertices and2variables occur in the same clause if and only if the corresponding vertices are adjacent. This correspondence allows us to use theseCNF
formulas and graphs interchangeably. We introduce the notion of Matching Width (MW) of a graphGand prove two theorems. One of them (Theorem 2) states that aNROBP
equivalent to a monotone 2-CNFformula with the corresponding graphGhavingMW
at least t is of size at least2t/a wherea is a constant dependent on the max-degree of G. The second theorem (Theorem 3) states that for each sufficiently large kthere is an infinite family of graphs of treewidthkand max-degree5whose MWis at least logn∗k/bfor some constantbindependent ofk. The main theorem immediately follows from replacement oftin the former lower bound by the latter one.
The proof of Theorem 2 uses the following combinatorial statement. LetVC(G) be the set of all vertex covers of a graphGand letSbe a family of subsets ofV(G) of size at leasttsuch that each element ofVC(G)is a superset of some element ofS. Then|S| ≥2t/awhereais a universal constant as in the previous paragraph.
In order to define the family of graphs for Theorem 3, we introduce graphsTr(H) whereTris a complete binary tree of heightrandHis an arbitrary graph. In the graph
Tr(H)each vertex ofTris replaced by a copy ofH. Copies corresponding to adjacent vertices of Tr are connected by edges so that each vertex of H is connected to the ‘same’ vertex ofH of the adjacent copy. For the proof of Theorem 3, we take asH a path of length aboutk/2.
The strategy outlined above is similar to that we used in [14]. However, there are two essential differences. First, due to a much more ‘elusive’ nature ofNROBPs compared to that ofOBDD, the counting argument is more sophisticated and more restrictive: it applies only to CNFformulas whose graphs are of constant degree. Due to this latter aspect, the family of graphs requires a more delicate construction and reasoning.
The rest of the paper is organized as follows. Section 2 introduces the necessary background. Section 3,4, and 5 prove the parameterized lower bound (the last two sec-tions prove auxiliary theorems used for the lower bound proof in section 3). Section 6 establishes the quasipolynomial separation between decisionDNNFandNROBP. Fi-nally, two sections in the Appendix demonstrate validity of our assumptions regarding
NROBP, see Section 2 for further details.
2
Preliminaries
In this paper when we refer to aset of literalswe assume that it does not contain an occurrence of a variable and its negation. For a setS of literals we denote byV ar(S) the set of variables whose literals occur inS. IfFis a Boolean function or its represen-tation by a specified structure, we denote byV ar(F)the set of variables ofF. A truth assignment toV ar(F)on whichFis true is called asatisfying assignmentofF. A set
occurring negatively are assigned withf alse. We denote byFSa function whose set of satisfying assignments consists of all setsS0of literals such thatS∪S0is a satisfying assignment ofF. We callFSasubfunctionofF.
Definition 1. A non-deterministic read-once branching program (NROBP) Y
imple-menting (computing) a function F is a directed acyclic graph (DAG) (with possible multiple edges) with one leaf, one root, and with some edges labelled by literals of the variables ofF in a way that there is no directed path having two edges labelled with literals of the same variable. We denote byA(P)the set of literals labelling edges of a directed pathPofY.
The connection betweenY andF is defined as follows. LetP be a path from the root to the leaf ofY. Then any set of literalsA⊇A(P)such thatV ar(A) =V ar(F)
is a satisfying assignment ofF. Conversely, letAbe a satisfying assignment ofF. Then there is a pathP from the root to the leaf ofY such thatA(P)⊆A.
Remark.A traditional definition of aNROBPis aROBPwith guessing nodes. Defini-tion 1 in fact introduces acyclic read-once switching and rectifier networks (AROSRNs). However, these models are equivalent in the sense that anAROSRNcan simulateNROBP
without increase of the number of edges and aNROBPcan simulate anAROSRNwith at most three times increase of the number of edges. The details are provided in Appendix B. The equivalence of these models is mentioned in [9].
We say that aNROBPY isuniformif the following is true. Letabe a node ofY and letP1andP2be2paths from the root ofY toa. ThenV ar(A(P1)) =V ar((A(P2)).
That is, these paths are labelled by literals of the same set of variables. Also, ifP is a path from the root to the leaf ofY thenV ar(A(P)) =V ar(F). Thus there is a one-to-one correspondence between the sets of literals labelling paths from the root to the leaf ofY and the satisfying assignments ofF.
All theNROBPs considered in Sections 3-6 of this paper are uniform.This
as-sumption does not affect our main result because an arbitraryNROBPcan be transformed into a uniform one at the price ofO(n)times increase of the number of edges. For the sake of completeness, we provide the transformation and its correctness proof in Ap-pendix A. We use the construction described in the proof sketch of Proposition 2.1 of [13].
Now we are going to define the Decomposable Negation Normal Form (DNNF) and its subclass decision-DNNFfor which we prove a separation result in Section 6.
Remark.The only thing we need to know for this separation result is that a CNF
formula with a bounded primal graph treewidth can be transformed into anFPT-size decision-DNNF[12]. That is, the two paragraphs below are not needed for the technical reasoning. We provide these definitions for the sake of completeness in the sense that all the representations of Boolean functions occurring in the statements of this paper are explicitly defined.
Recall that a Boolean circuit over the∨,∧,¬is calledde Morgancircuit if the nega-tions are applied only to the input (variable) gates. Next, we define adecomposable node. Letxbe a gate of a Boolean circuitX. We denote byV Reach(x)the set of vari-ables such thatxis reachable from their respective input gates. We say thatxis decom-posableif for any two in-neighboursy1andy2ofx,V Reach(y1)∩V Reach(y2) =∅.
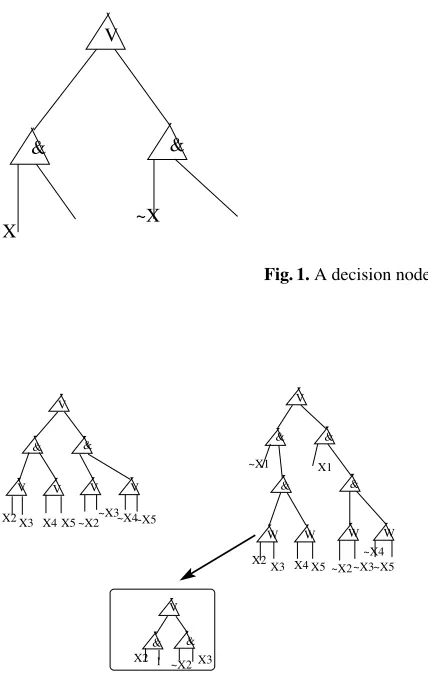
We say that anOR-nodexof aDNNFis a decision node (see Figure 1) if it is binary, both its in-neighboursy1andy2areAND-nodes and there is a variablexsuch thatxis
an input of, sayy1and¬xis an input ofy2. ADNNFis calleddecisionDNNFif all its
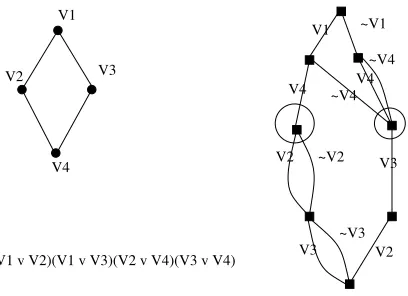
ORnodes are decision ones. See Figure 2 showing aDNNFand a decision-DNNFfor the same function. Note that for the latter we use both variable and constant input gates.
V
& &
X
[image:6.612.134.348.197.535.2]~X
Fig. 1.A decision node
X2X3 X4 X5 ~X2~X3~X4~X5 V
& &
V V V V
V
& &
X2
X3 X4 X5 ~X2~X3 ~X1 X1
& &
W W W W
V
& & X2
~X2X3 1
~X4 ~X5
Fig. 2.ADNNFand a decision-DNNFfor a function(x1∨x2∨x3)(x1∨x4∨x5)(¬x1∨ ¬x2∨
¬x3)(¬x1∨ ¬x4∨ ¬x5). For the sake of compactness, we introduced a ‘macro-node’W that
expresses a disjunction of two literals in terms of decision-DNNF.
Given a graphG, itstree decompositionis a pair(T,B)whereT is a tree andBis a set of bagsB(t)corresponding to the verticestofT. EachB(t)is a subset ofV(G)and the bags obey the rules ofunion(that is,S
t∈V(T)B(t) =V(G)),containment(that is,
for each{u, v} ∈E(G)there ist∈V(t)such that{u, v} ⊆B(t)), andconnectedness
Thewidthof(T,B)is the size of the largest bag minus one. The treewidth ofGis the smallest width of a tree decomposition ofG.
Given aCNFformulaφ, itsprimal graphhas the set of vertices corresponding to the variables ofφ. Two vertices are adjacent if and only if there is a clause ofφwhere the corresponding variables both occur.
3
The parameterized lower bound
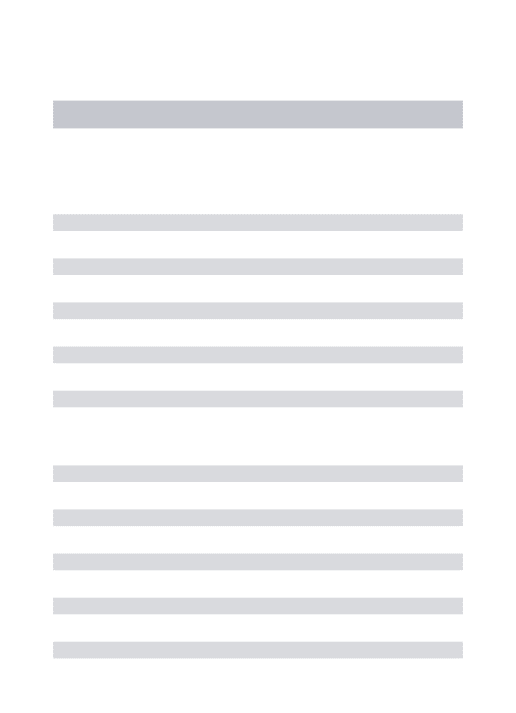
Amonotone2-CNF formula has clauses of the form(x∨y) wherexandy are two distinct variables. Such CNFformulas can be put in one-to-one correspondence with
graphs that do not have isolated vertices. In particular, letGbe such a graph. ThenG
corresponds to a 2CNFformulaφ(G)whose variables are the vertices ofGand the set of clauses is{(u∨v)|{u, v} ∈E(G)}. These notions, together with the corresponding
NROBP, are illustrated on Figure 3.2It is not hard to see thatGis the primal graph of
φ(G), hence we can refer to the treewidth ofGas the primal graph treewidth ofφ(G).
V1 ~V1
V4 ~V4
V2 ~V2
V3 V1
V4
V2 V3
~V3
(V1 v V2)(V1 v V3)(V2 v V4)(V3 v V4)
V4 ~V4
V3
[image:7.612.140.344.323.471.2]V2
Fig. 3.A graph, the correspondingCNFformula and aNROBPof theCNFformula. Circles denote the nodes used in Section 4 for illustration of the definition of at-node.
The following theorem is the main result of this paper.
Theorem 1. There is a constantcsuch that for eachk≥3there is an infinite classG
of graphs each of treewidth of at mostksuch that for eachG∈G, the smallestNROBP
equivalent toφ(G)is of size at leastnk/c, wherenis the number of variables ofφ(G). In order to prove Theorem 1, we introduce the notion ofmatching width(MW) of a graph and state two theorems proved in the subsequent two sections. One claims that if the max-degree ofGis bounded then the size of aNROBPrealizingφ(G)is exponential in theMWofG. The other theorem claims that for each sufficiently largekthere is an
2
Notice that on theNROBPin Figure 3, there is a path wherev2occurs beforev3 and a path
infinite class of graphs of bounded degree and of treewidth at mostkwhoseMWis at leastlogn∗k/bfor some universal constantb. Theorem 1 will follow as an immediate corollary of these two theorems.
Definition 2. Matching width.
Let SV be apermutation ofV(G) and letS1 be aprefix ofSV (i.e. all vertices of SV \S1 are ordered afterS1). The matching width ofS1 is the size of the largest
matching consisting of the edges betweenS1andV(G)\S1.3Thematching widthof SV is the largestmatching widthof a prefix ofSV. Thematching widthofG, denoted bymw(G), is the smallest matching width of a permutation ofV(G).
Remark. The above definition of matching width is a special case of the notion of
maximum matching widthas defined in [15].
To illustrate the notion of matching width recall thatCnandKnrespectively denote a cycle and a complete graph ofnvertices. Then, for a sufficiently largen,mw(Cn) = 2. On the other handmw(Kn) =bn/2c.
Theorem 2. There is a functionfsuch that for any graphGthe size ofNROBPrealizing
φ(G)is at least2mw(G)/f(x)wherexis the max-degree ofG.
Theorem 3. There is a constantbsuch that for eachk≥3there is an infinite classG
of graphs of degree at most5such that the treewidth of all the graphs ofGis at mostk
and the matching width of eachG∈Gis at least(logn∗k)/bwheren=|V(G)|.
Now we are ready to prove Theorem 1.
Proof of Theorem 1.LetGbe the class whose existence is claimed by Theorem 3.
By Theorem 2, for eachG∈Gthe size of aNROBP realizingφ(G)is of size at least 2mw(G)/f(5). Further on, by Theorem 3,mw(G)≥(logn∗k)/b, for some constantb.
Substituting the inequality formw(G)into the lower bound2mw(G)/f(5) supplied by
Theorem 2, we get that the size of aNROBPis at least2logn∗k/cwherec =f(5)∗b. Replacing2lognbyngives us the desired lower bound.
From now on, the proof is split into two independent parts: Section 4 proves Theo-rem 2 and Section 5 proves TheoTheo-rem 3.
4
Proof of Theorem 2
Recall that we are going to prove that for any graphG, the size of aNROBPcomputing
φ(G)is at least2mw(G)/f(x)wheref(x)is a universal function depending on the
max-degreexofGonly.
Recall that the vertices of graphGserve as variables inφ(G). That is, in the truth assignments toV ar(φ(G)), the vertices are treated as literals and may occur positively or negatively. Similarly for a pathP of aNROBPZ implementingφ(G), we say that a vertexv∈V(G)occursonPif eithervand¬vlabels an edge ofP. In the former case this is apositive occurrence, in the latter case anegativeone.
Recall that a Vertex Cover (VC) of GisV0 ⊆ V(G)incident to all the edges of
E(G).
Observation 1 S is a satisfying assignment ofφ(G)if and only if the vertices ofG
occurring positively inS form aVC ofG. Equivalently,V0 ⊆ V(G)is the set of all vertices ofGoccurring positively on a root-leaf path ofZ if and only ifV0 is aVCof
G.
In light of Observation 1, we denote the set of all vertices occurring positively on a root-leaf pathPofZbyV C(P).
The proof of Theorem 2 requires two intermediate statements. For the first state-ment, letabe a node of anNROBPZ. For an integert >0, we callaat-nodeif there is a setS(a)of size at leasttsuch that for each root-leaf pathP passing througha,
S(a) ⊆ V C(P). To demonstrate the notion of at-node, consider the two nodes de-noted by circles in Figure 3. They are2-nodes for the givenNROBP, the witnessing set for the left-hand node is{v1, v4}and for the right-hand node is{v2, v3}.
Lemma 1. Suppose that the matching width ofGis at leastt. Then any root-leaf path
ofZcontains at-node or, put it differently,t-nodes ofZform a root-leaf cut.
Proof.We need to show that each root-leaf pathP passes through at-node. Due to the uniformity ofZ, (the vertices ofGcorresponding to) the labels ofPbeing explored from the root to the leaf form a permutationSV ofV(G). LetSV0 be a prefix of the permutation witnessing the matching width at leastt. In other words, there is a matching
M = {{u1, v1}, . . . ,{ut, vt}}ofGsuch that all ofu1, . . . , utbelong toSV0, while all ofv1, . . . , vtbelong toSV \SV0. Letube the last vertex ofSV0 and letabe the head of the edge ofP whose label is a literal ofu. We claim thatais at-node with a witnessing setS(a) ={x1, . . . , xt}such thatxi ∈ {ui, vi}for eachxi.
Indeed, observe that for each{ui, vi}there isxi∈ {ui, vi}such thatxi∈V C(P) for each root-leaf pathPpassing througha. Clearly for any root-leaf pathQofZ, either
ui ∈V C(Q)orvi ∈V C(Q)for otherwiseV C(Q)is not aVCofGin contradiction to Observation 1. Thus if suchxi does not exist then there are two pathsQ1 andQ2 meetingasuch thatV C(Q1)∩ {u
i, vi}={ui}andV C(Q2)∩ {ui, vi}={vi}. For a root-leaf pathQpassing throughadenote byQathe prefix ofQending witha and by¬Qathe suffix ofQbeginning witha. Note that by definition ofSV0,uioccurs inPa andvioccurs in¬Pa. By uniformity ofZ,V ar(Pa) = V ar(Q1a) = V ar(Q2a) and hence it follows that ui occurs both in Q1a and Q2a. Similarly we establish that
vi occurs in both¬Q1a and¬Q2a. It remains to observe that, by definition,ui occurs negatively inQ2
aandvi occurs negatively in¬Q1a. HenceQ∗ =Q2a+¬Q1a is a root-leaf path ofZsuch thatV C(Q∗)is disjoint with{u
i, vi}, a contradiction to Observation 1, confirming the existence of the desiredxi.
Suppose that there is a root-leaf pathP0 ofZ passing throughasuch thatS(a)*
V C(P0). This means that there isxi ∈/ V C(P0)contradicting the previous two para-graphs. Thus beingaat-node has been established and the lemma follows.
For the second statement, letAandBbe two families of subsets of a universeU. We say thatA coversBif for each S ∈ B there is S0 ∈ A such thatS0 ⊆ S. If each element ofAis of size at leasttthen we say thatAis at-coverofB. Denote by
VC(G)the set of all VCs ofG.
Theorem 4. There is a functionfsuch that the following is true. LetHbe a graph. Let
The proof of Theorem 4, using a probabilistic argument, is provided in Subsection 4.1. See [2] (Theorem 3 and Corollary 2) for a non-probabilistic proof.
Now we are ready to prove Theorem 2.
Proof of Theorem 2.LetNbe the set of allt-nodes ofZ. For eacha∈N, specify oneS(a)of size at leasttsuch that for all pathsP ofZ passing througha,S(a) ⊆
V C(P). LetS={S1, . . . , Sq}be the set of all suchS(a). Then we can specifydistinct
a1, . . . , aqsuch thatSi=S(ai)for alli∈ {1, . . . , q}.
Observe thatScoversVC(G). Indeed, letV0 ∈VC(G). By Observation 1, there is a root-leaf pathP withV0 =V C(P). By Lemma 1,P passes through somea∈N
and hence S(a) ⊆ V C(P). By definition,S(a) = Si fori ∈ {1, . . . , q}and hence
Si⊆V0. ThusSis at-cover ofVC(G).
It follows from Theorem 4 thatq =|S| ≥2t/f(x)wherexis a max-degree ofG
andf is a universal function independent onGort. It follows thatZ contains at least 2t/f(x)distinct nodes namelya
1, . . . , aq.
4.1 Proof of Theorem 4
DenoteE(H)byE. For eache={u, v}, we toss a fair coin whose outcomes areuor
v and the denote the outcome byOut(e). ForE0 ⊆ E, letOut(E0) = {Out(e)|e ∈
E0}. That is,Out(E0)is a random set consisting of ends of edges ofE0each chosen uniformly at random.
Claim. LetS⊆V(G). ThenP r(S ⊆Out(E))≤(1−2−x)|S|/(x+1)
Let us see how the claim implies the statement of the lemma. LetAbe as in the statement of the lemma. Then, by the claim above and the union bound, the probability that at least one element ofAis a subset ofOut(E)is at most|A| ∗(1−2−x)t/(x+1)=
|A| ∗2−t/f(x)wheref is a function such that2−1/f(x)= (1−2−x)1/(x+1). Suppose
that |A| < 2t/f(x). Then the above probability is smaller than1. That is, there is a
setT obtained by choosing one end of eache ∈ E such thatT is not a superset of any element ofA. By constructionT is a VC ofH. Thus we have just observed that any family of less than2t/f(x) subsets ofV(H)of size at leasttcannot cover all of
VC(H), as required.
Proof of the claim.Foru∈V(H), denote byEuthe set of edges incident tou. For
S⊆V(H), letES=Su∈SEu. Then it is easy to notice the following.
u∈Out(E)⇔u∈Out(Eu) (1)
P r(u∈Out(E)) =P r(u∈Out(Eu)) (2)
Furthermore, for a setS,
S⊆Out(E)⇔S⊆Out(ES) (3)
thatEu∩E0=∅and letS⊆V(H)be such thatP r(S⊆Out(E0))>0. Then
P r(u∈Out(E)|S⊆Out(E0)) =P r(u∈Out(Eu)|S⊆Out(E0)) =P r(u∈Out(Eu)) (4) LetI ={u1, . . . , uq}be an independent set ofH. Then the setsEui are pairwise
disjoint and, in particular, for eachi < q,Ei =S
j≤iEui is disjoint withEui+1. We
prove by induction on q that P r(I ⊆ Out(E)) = Qq
i=1P r(ui ∈ Out(Eui)). For
q= 1the claim immediately follows from (2). Assume thatq >1. Then
P r(I⊆Out(E)) =P r(I\{uq} ⊆Out(E))∗P r(uq ∈Out(E)|I\{uq} ⊆Out(E)) (5) By the induction assumption,
P r(I\ {uq} ⊆Out(E)) = q−1
Y
i=1
P r(ui∈Out(Eui)) (6)
Also,
P r(uq∈Out(E)|I\ {uq} ⊆Out(E)) =P r(uq ∈Out(E)|I\ {uq} ⊆Out(EI\q))
=P r(uq ∈Out(Euq))
(7) the first equality follows from (3), the second from (4). Replacing the factors of the right part of (5) with the respective right parts of (6) and (7), we obtainP r(I ⊆
Out(E)) = [Qq−1
i=1P r(ui∈Out(Eui))]∗P r(uq ∈Out(Euq))as required.
Notice further thatP r(u∈Out(Eu)) = 1−2−|Eu| ≤1−2−x. Hence,P r(I ⊆
Out(E)) ≤ (1−2−x)|I|. Now, consider an arbitraryS ⊆ V(H). Then there is an independent setI ⊆Sof size at least|S|/(x+ 1)(recall thatxis the max-degree of
H). HenceP r(S⊆Out(E))≤P r(I⊆Out(E))≤(1−2−x)|S|/(x+1)as required.
5
Proof of Theorem 3
Recall that we are going to prove that for eachk≥3there is an infinite class of graphs of degree at most5having treewidthkand matching width at least(logn∗k)/bwhere
bis a universal constant.
Let us define first a more general class of graphs for which the class of graphs used for the proof of Theorem 3 will be a subclass. Denote byTra complete binary tree of height (root-leaf distance)r. LetT be a tree andHbe an arbitrary graph. ThenT(H)is a graph having disjoint copies ofH in one-to-one correspondence with the vertices of
T. For each pairt1, t2of adjacent vertices ofT, the corresponding copies are connected
by making adjacent the pairs ofsamevertices of these copies. Put differently, we can considerH as a labelled graph where all vertices are associated with distinct labels. Then for each edge {t1, t2} of T, edges are introduced between the vertices of the
corresponding copies having the same label. An example of this construction is shown on Figure 4.
Fig. 4.Graphs from the left to the right:T3, P3, T3(P3). The dotted ovals surround the copies of
P3inT3(P3).
inside the proof. We also need to prove three structural lemmas about graphsT(H), the first one being an auxiliary statement for the second one and the second one being an auxiliary statement for the third one. Note that these structural lemmas do not restrict the structure ofH, besides Lemma 4 requiringH to be connected.
Lemma 2. Suppose the vertices ofT(H)are partitioned into two subsets. LetLbe a
subset of vertices ofH such that |L| = t. Suppose there are two copiesH1and H2
ofH such that for eachu∈Lthe copies of vertexuinH1andH2belong to distinct
partition classes. ThenT(H)has a matching of sizetwith the ends of each edge lying in different partition classes.
Proof.Letv1andv2be the respective vertices ofTcorresponding toH1andH2. Let pbe the path betweenv1andv2inT. Then for eachu∈Lthere are two consecutive
vertices v01 andv20 of this path with respective copiesH10 andH20 such that the copy
u01of uinH10 belongs to the same partition class as the copyu1 ofuinH1 and the
copy u02 of u inH20 belongs to the same partition class as the copy u2 of uinH2.
By construction,T(H)has an edge{u01, u02}which we choose to correspond tou. Let
L={u1, . . . ut}and consider the set of edges as above corresponding to eachui. By construction, both ends of the edge corresponding to eachuiare copies ofuiand also these ends correspond to distinct partition classes. It follows that these edges do not have joint ends and indeed constitute a desired matching of sizet
Lemma 3. LetTbe a tree consisting of at leastpvertices. LetHbe a connected graph of at least2pvertices. LetV1, V2 be a partition ofV(T(H))such that both partition
classes contain at leastp2vertices. ThenT(H)has a matching of sizepwith the ends
of each edge belong to distinct partition classes.
Proof.Assume first that there are at leastpcopies ofHcorresponding to vertices of
T that contain vertices of both partition classes. SinceHis a connected graph, for each copy we can specify an edge with one end inV1and the other end inV2. These edges
belong to disjoint copies ofH, hence none of these edges have a common end. Since there arepcopies ofH, we have the desired matching of sizep.
If the assumption in the previous paragraph is not true then, sinceT has at least
pvertices, there is a vertex uof T such that the copy H1 of H corresponding tou
contains vertices of only one partition class; assume w.l.o.g. that this class isV1. We
H2ofH corresponding tov contains at leastpvertices ofV2. Indeed, otherwise, the
vertices of the copies ofH associated with the non-partitioned vertices ofTall belong toV1. Consequently, vertices ofV2can occur only in the remaining at mostp−1copies
ofH. If each of these copies contains at mostp−1vertices ofV2then the total number
of vertices ofV2is smaller thanp2in contradiction to our assumption. We conclude that
the required vertexvindeed exists.
LetLbe the set of vertices ofH whose copies inH2belong toV2. By assumption,
all the copies ofLinH1belong toV1. By Lemma 2,H1andH2witness the existence
of a matching of sizepwith ends of each edge belonging to distinct partition classes.
Lemma 4. Letpbe an arbitrary integer and letH be an arbitrary connected graph of
2pvertices. Then for anyr≥ dlogpe,mw(Tr(H))≥(r+ 1− dlogpe)p/2.
Proof.The proof is by induction onr. The first considered value ofrisdlogpe. After thatrwill increment in2. In particular, for all values ofrof the formdlogpe+ 2x, we will prove thatmw(Tr(H))≥ (x+ 1)pand, moreover, for each permutationSV of
V(Tr(H)), the required matching can be witnessed by a partition ofSV into a suffix and a prefix of size at leastp2each. Let us verify that the lower boundmw(T
r(H))≥ (x+ 1)pimplies the lemma. Suppose thatr = dlogpe+ 2xfor some non-negative integerx. Thenmw(G)≥(x+ 1)p= ((r− dlogpe)/2 + 1)p >(r− dlogpe+ 1)p/2. Supposer = dlogpe+ 2x+ 1. Thenmw(G) = mw(Tr(H)) ≥ mw(Tr−1(H)) ≥
(x+ 1)p= ((r− dlogpe −1)/2 + 1)p= (r− dlogpe+ 1)p/2.
Assume thatr = dlogpeand let us show the lower bound of pon the matching width.Trcontains2dlogpe+1−1≥2logp+1−1 = 2p−1≥pvertices. By construction,
Hcontains at least2pvertices. Consequently, for each ordering of vertices ofTrwe can specify a prefix and a suffix of size at leastp2(just choose a prefix of sizep2). LetV
1
be the set of vertices that got to the prefix and letV2be the set of vertices that got to the
suffix. By Lemma 3 there is a matching of size at leastpconsisting of edges between
V1andV2confirming the lemma for the considered case.
Let us now prove the lemma forr = dlogpe+ 2xforx ≥ 1. Specify the cen-tre of Tr as the root and letT1, . . . , T4 be the subtrees of Tr rooted by the grand-children of the root. Clearly, all ofT1, . . . , T4 are copies ofT
r−2. Let SV be a
se-quence of vertices of V(Tr(H)). Let SV1, . . . , SV4 be the respective sequences of
V(T1(H)), . . . , V(T4(H))‘induced’ bySV (that is their order is as inSV). By the
induction assumption, for each of them we can specify a partitionSVi
1, SV2iinto a
pre-fix and a sufpre-fix of size at leastp2each witnessing the conditions of the lemma forr−2.
Letu1, . . . , u4 be the last respective vertices ofSV11, . . . , SV14. Assume w.l.o.g. that
these vertices occur inSV in the order they are listed. LetSV0, SV00be a partition of
SV into a prefix and a suffix such that the last vertex ofSV0 isu2. By the induction
assumption we know that the edges betweenSV2
1 ⊆ SV0 andSV22 ⊆ SV00 form a
matchingM of size at leastxp. In the rest of the proof, we are going to show that the edges betweenSV0 andSV00 whose ends do not belong to any ofSV12, SV22can be used to form a matchingM0of sizep. The edges ofM andM0do not have joint ends, hence this will imply existence of a matching of sizexp+p= (x+ 1)p, as required.
The sets SV0 \ SV2
contains at leastpvertices. Indeed,T2(isomorphic toT
r−2) has at leastpvertices just
because we are at the induction step andTrcontains at least4times more vertices than
T2. So, in fact,T
r\T2contains at least3pvertices. Furthermore, sinceu1precedesu2,
the wholeSV1
1 is inSV0. By definition,SV11is disjoint withSV12and hence it is a
sub-set ofSV0\SV2
1. Furthermore, by definition,|SV11| ≥p2and hence|SV0\SV12| ≥p2
as well. Symmetrically, sinceu3 ∈ SV00, we conclude thatSV23 ⊆SV00\SV22and
due to this|SV00\SV2 2| ≥p2.
ThusSV0\SV2
1 andSV00\SV22partitionV([Tr\T2](H))into classes of size at leastp2each and the size ofT
r\T2is at least3p. Thus, according to Lemma 3, there is a matchingM0of size at leastpcreated by edges betweenSV0\SV2
1 andSV00\SV22,
confirming the lemma, as specified above.
Proof of Theorem 3.First of all, let us identify the classG. Recall thatPxa path ofxvertices. Further on, let0 ≤ y ≤ 3be such thatk−y+ 1is divided by4. The considered classGconsists of allG=Tr(Pk−y+1
2
)forr≥5dlogke.
Let us show that the treewidth of the graphs ofGis bounded byk. Consider the following tree decomposition ofG=Tr(H =Pk−y+1
2 ). The decomposition tree isTr.
ConsiderTras the rooted tree with the centre being the root. The bag of each vertex includes the vertices of the copy ofH associated with this vertex plus the copy of the parent (for a non-root vertex). The properties of tree decomposition can be verified by a direct inspection. The size of each bag is at mostk−y+ 1, hence the treewidth is at mostk−y≤k.
Observe that max-degree of the graphs ofGis5. Indeed, consider a vertexv of
G∈ Gthat belongs to a copy ofH associated with a vertexxof someTr. Inside its copy ofH,v is adjacent to at most2vertices. Outside its copy ofH,v is adjacent to vertices in the copies ofHassociated with the neighbours ofx, precisely one neighbour per copy. Vertexxis adjacent to at most3vertices ofTr. It follows thatvhas at most3 neighbours outside its copy ofH.
In the rest of the proof we assume thatk ≥ 50. Te assumption does not restrict generality because the constant can be made larger to incorporate smaller values ofk. Let us reformulate the lower bound ofmw(G)in terms oflognandkwheren=V(G). Notice thatpused in Lemma 4 can be expressed as(k−y+ 1)/4. Hence, the lower bound on the matching width can be seen as(r− dlog(k−y4+1)e+ 1)∗(k−y+ 1)/8. This lower bound can be immediately simplified by noticing that by the choice ofkand
y,(k−y+ 1)/8≥k/16anddlog(k−y4+1)e ≤ dlogke. Hence,(r− dlogke+ 1)k/16 can serve as a lower bound onmw(G). To draw the connection betweennandr, notice that n = (2r+1−1)(k−y + 1)/2. It follows thatr+ 1 = log( n
(k−y+1)/2 + 1).
In particular, it follows thatr+ 1 ≥ logn−logk ≥ logn− dlogke. It follows that
r+ 1in the lower bound can be replaced bylogn− dlogkeand the new lower bound is(logn−2dlogke)k/16. Consequently, forlogn≥5dlogkethe lower bound can be represented as (logn∗k)/32 which is the form needed for the theorem. It remains to observe thatr ≥ 5dlogkeimplieslogn ≥ 5dlogke. By the above reasoning,r ≥
5dlogkeimplieslog((k−yn+1)/2+ 1)≥5dlogke. By our choice ofk≥50,log(n/20 + 1) ≥log((k−yn+1)/2 + 1)≥5dlogke. By construction ofGand the choice ofr,n≥
In particular, it follows thatn≥n/20 + 1. Hencelogn≥log(n/20 + 1)≥5dlogke.
6
Separation between
ROBPand decision-
DNNFLemma 5. The space complexity ofNROBPonCNFformulasφ(Tr(Pr))isΩ(nlogn/c)
for some universal constantc.
Proof.The number of variables ofTr(P2r)isn= (2r+1−1)∗2r= 2r∗4r−2r. That is,r = logn+24rr ≥logn−logr−2. For a sufficiently larger,r ≥logr+ 2, hencer≥logn−rand hencer≥logn/2.
By Lemma 4,mw(Tr(P2r)) ≥ (r+ 1− dlogre)r/2. That is,mw(Tr(P2r)) ≥ (log2n+ 1−loglog2n −1)∗logn4 It is not hard to see that for a sufficiently larger(and
hence sufficiently largen),mw(Tr(P2r))≥ log 2n
16 . The statement of the theorem now
follows immediately from Theorem 2.
Theorem 5. There is an infinite class of CNF formulas such that the complexity of
decision-DNNF on this class is O(n5)while the complexity ROBP is Ω(nlogn/c)for
some universal constantc.
Proof.Consider the classφ(Tr(Pr)). As aROBPcan be seen as a special case of an
NROBP, the lower bound on the space complexity ofROBPonφ(Tr(Pr))immediately follows from Lemma 5.
It follows from Theorem 1 in [12] that the space complexity of decision-DNNFon a CNF formula with primal graph treewidtht isO(2tn)(the theorem in fact uses a different parameter of aCNFformula, however it is shown to never exceed the primal graph treewidth). Arguing as in the proof of Theorem 3, we observe that the treewidth ofTr(P2r)is at most4r. We know from the proof of Lemma 5 thatr= logn+24rr. That isr≤ log(n+ 2r)and, for a sufficiently larger,r ≤log(2n) = logn+ 1. That is, for a sufficiently larger, the treewidth ofTr(P2r)is at most4 logn+ 4. Substituting 4 logn+ 4insteadtinO(2tn)results inO(n5), completing the required separation.
Thus, Theorem 5 shows that the quasi-polynomial upper bound on the size ofROBP
simulating the given decision-DNNFas described in [1] is essentially tight.
References
1. Paul Beame, Jerry Li, Sudeepa Roy, and Dan Suciu. Lower bounds for exact model counting and applications in probabilistic databases. InProceedings of the Twenty-Ninth Conference
on Uncertainty in Artificial Intelligence, Bellevue, WA, USA, August 11-15, 2013, 2013.
2. Simone Bova, Florent Capelli, Stefan Mengel, and Friedrich Slivovsky. Expander cnfs have exponential DNNF size.CoRR, abs/1411.1995, 2014.
3. Randal E. Bryant. Symbolic boolean manipulation with ordered binary-decision diagrams.
ACM Comput. Surv., 24(3):293–318, 1992.
4. Adnan Darwiche. Decomposable negation normal form.J. ACM, 48(4):608–647, 2001. 5. Adnan Darwiche. SDD: A new canonical representation of propositional knowledge bases.
In22nd International Joint Conference on Artificial Intelligence (IJCAI), pages 819–826,
6. Adnan Darwiche and Pierre Marquis. A knowledge compilation map. J. Artif. Intell. Res.
(JAIR), 17:229–264, 2002.
7. Andrea Ferrara, Guoqiang Pan, and Moshe Y. Vardi. Treewidth in verification: Local vs. global. InLogic for Programming, Artificial Intelligence, and Reasoning, 12th International
Conference (LPAR), pages 489–503, 2005.
8. Abhay Kumar Jha and Dan Suciu. On the tractability of query compilation and bounded treewidth. In15th International Conference on Database Theory (ICDT), pages 249–261, 2012.
9. Stasys Jukna. A note on read-k times branching programs.Electronic Colloquium on
Com-putational Complexity (ECCC), 1(27), 1994.
10. Stasys Jukna. Boolean Function Complexity: Advances and Frontiers. Springer-Verlag, 2012.
11. Kenneth L. McMillan. Hierarchical representations of discrete functions, with application to model checking. InComputer Aided Verification, 6th International Conference,(CAV), pages 41–54, 1994.
12. Umut Oztok and Adnan Darwiche. On compiling CNF into decision-dnnf. InPrinciples and
Practice of Constraint Programming - 20th International Conference, (CP), pages 42–57,
2014.
13. Alexander A. Razborov, Avi Wigderson, and Andrew Chi-Chih Yao. Read-once branching programs, rectangular proofs of the pigeonhole principle and the transversal calculus. In
Symposium on the Theory of Computing (STOC), pages 739–748, 1997.
14. Igor Razgon. On obdds for cnfs of bounded treewidth. InPrinciples of Knowledge
Repre-sentation and Reasoning(KR), 2014.
15. Martin Vatschelle.New width parameters of graphs. PhD thesis, Department of Informatics, University of Bergen, 2012.
16. Ingo Wegener.Branching Programs and Binary Decision Diagrams. SIAM Monographs on Discrete Mathematics and applications, 2000.
A
Transformation of an
NROBPinto a uniform one
LetZbe aNROBP. Thein-degreed+(v)of a nodevis a number of in-neighbours (this is essential point because of the possibility of multiple edges). We assume that all the in-coming edges of nodesvwithd+(v)>1are unlabelled. We call such aNROBPclean. This assumption does not restrict generality because aNROBPcan be transformed into a clean one having at most twice more edges than the originalNROBP. Indeed, letvbe a node with in-degree greater than1and let(u, v)be an edge labelled with a literalx. Subdivide(u, v)and letu, w, vbe the path that replaced(u, v). Then label(u, w)with
x. Clearly, as a result we get aNROBPimplementing the same function as the original
one. Notice thatwhas in-degree1, that is the number of edges violating the assumption has decreased by1. Thus, one can inductively argue that in case ofq‘violating’ edges, there is a transformation to a NROBP satisfying the above assumption that creates at mostqadditional edges.
For a nodevofZ, denote byIV arZ(v)the set of variablesxsuch that a literal ofx occurs on path from the root tov(the subscript can be omitted if clear from the context). We call the edges (u, v)ofZ such thatd+(v) > 1 relevant. A relevant edge(u, v)
irregularifIV ar(u) ⊂IV ar(v)andregularotherwise. LetIV ar(v)\IV ar(u) =
1. Remove the edge(u, v).
2. Introduce new verticesu1, . . . , uq; we will refer touasu0for the sake of
conve-nience.
3. For each1 ≤ i ≤q, introduce two edges(ui−1, ui)and label them themxiand ¬xi, respectively.
4. Introduce an unlabelled edge(uq, v).
LetZ0be the graph obtained as a result of the above transformation.
Observation 2 1. IV arZ(v) =IV arZ0(v).
2. The edge(uq, v)is regular inZ0.
3. Z0is clean.
Proof.Immediate by construction.
Lemma 6. Z0is aNROBPthat computes the same function asZ.
Proof.To establish the read-once property ofZ0, it is sufficient to prove that any root-leaf pathPofZ0that is not a path ofZis read-once. By construction, such a path
P includesuandv and the subpathPu,v starting atuand ending atv goes through
u1, . . . , uq as defined above. Let Pu be the prefix ofP ending at u, andPv be the suffix ofP beginning atv. Notice thatPu∪Pvis a subgraph of a path ofZ and hence cannot have repetitions of variable occurrences. By construction,Pu,vdoes not have repeated variable occurrences either. A variable ofPu,vdoes not occur onPubecause, by construction, the variables occurring onPu,v do not belong toIV arZ(u). Finally all the variables occurring on Pu,v, by construction, belong to IvarZ(v) and hence cannot belong toPv. Indeed, otherwise if such a variablexis found then there is a path
P0 ofZ from the root tov on whichxoccurs and hencexoccurs twice onP0+Pv in contradiction to the read-once property of Z. Thus we conclude thatZ0 is indeed read-once.
LetS be a satisfying assignment of the function computed by Z and letP be a root-leaf path ofZ withA(P) ⊆ S. IfP does not include (u, v)thenP is a root-leaf path ofZ0. Otherwise, letP
u andPv be as in the previous paragraph and letP0 be a u−v path withu1, . . . , uq being the intermediate vertices and the in-edge for each ui is the one labelled with the literal of xi that belongs toS (by construction, such a selection is possible) and, as a result A(P0) ⊆ S. Taking into account that
A(Pu)∪A(Pv)⊆A(P)⊆S, we conclude thatA(Pu+P0+Pv)⊆S. That is, in any case there is a root-leaf path ofZwhose set of literals is a subset ofSand henceSis a satisfying assignment of the function computed byZ0.
Conversely, letS be a satisfying assignment of the function computed byZ0. Let
P be a root-leaf path ofZ0 such that A(P) ⊆ S. IfP is not a path ofZ then, by construction,Pincludes bothuandvand a path ofZcan be obtained by replacement of the subpath ofPbetweenuandvby an edge(u, v). Clearly, the set of literals of this resulting path is a subset ofA(P), henceS is a satisfying assignment of the function computed byZ.
Lemma 7. The number of irregular edges ofZ0is smaller than the number of irregular
Proof.Denote byRelZ, RgZ, RelZ0, RgZ0 the sets of relevant edges ofZ, regular
edges ofZ, relevant edges ofZ0, and regular edges ofZ0, respectively. It is not hard to see that by construction,RelZ0 = (RelZ\ {(u, v)})∪ {(uq, v)}. That is,|RelZ0|=
|RelZ|. By assumption,(u, v)∈/ RgZ. HenceRgZ ⊆RelZ0. In factRgZ ⊆RgZ0. To
show this, we need the following claim.
Claim. For each nodew∈V(Z)∪V(Z0),IV arZ(w) =IV arZ0(w).
Proof.Letx∈IV arZ(w)and letPbe a path from the root ofZtowcontaining an occurrence ofx. Note that by constructionP is either a path ofZ0or it can be replaced by a pathP0withA(P)⊆A(P0). Hencex∈IV arZ0(w).
Conversely, letx ∈ IV arZ0(w) and let P be a path from the root of Z0 to w
containing an occurrence ofx. IfP does not containvthenP is path ofZand hence
x∈IV arZ(w). IfP containsvbutxoccurs on the suffixPvofP starting atvthen, sincePvis a path inZ, appendingPvto an arbitrary path from the root tovwill give us a path ofZon whichxoccurs. Finally ifxoccurs on the prefix ofP ending atvthen
x ∈ IV arZ0(v). By the first statement of Observation 2, IV arZ(v) = IV arZ0(v).
That is, there is a pathP0 of Z from the root towthat contains an occurrence of x. ConsequentlyP0+Pvis a a path ofZcontaining an occurrence ofx.
Now, let(u0, v0) ∈ RgZ, that is IV arZ(u) = IV arZ(v). By the above claim,
IV arZ0(u) =IV arZ(u) = IV arZ(v) =IV arZ0(v). That is,(u0, v0)∈RgZ0. Thus RgZ0includes all the elements ofRgZand, in addition(vq, u), by the second statement
of Observation 2. It follows that|RgZ0|>|RgZ|. Now, the number of irregular edges
ofZandZ0are, respectively,|Rel
Z| − |RgZ|and|RelZ0| − |RgZ0|. It follows from the
proved above that the latter is smaller than the former.
Theorem 6. LetZ be a cleanNROBPwithqirregular edges. Then there is a uniform
NROBPZ∗computing the same function asZand having at most2qnedges more than
Z.
Proof.By induction onq. Ifq = 0then all the relevant edges ofZ are regular. It is easy to observe that in this caseZis uniform and hence no further transformation is needed.
Supposeq > 1. Pick an irregular edge(u, v)and transformZ toZ0 as specified above. By Lemma 6,Z0is aNROBP. By the third statement of Observation 2,Z0is clean.
By Lemma 7,Z0has at mostq−1irregular edges. Hence, by the induction assumption, there is a uniformNROBPZ∗computing the same function asZ0 and having at most 2(q−1)nmore edges thanZ0. AsZ0computes the same function asZ, by Lemma 6 and, by construction, has at most2nedges more thanZ∗, we conclude thatZcomputes the same function asZand has at most2qnmore edges.
B
Equivalence of the
AROSRNand the traditional definition of the
NROBPon a directed path ofZ. A node labelled with a variable has two outgoing edges one labelled withtruethe other withf alse. Finally, the leaves are labelled withtrueand
f alse.
It is convenient to see each edgeelabelled withtrueorf alsebeing in fact respec-tively labelled with the positive or negative literal of the variable labelling the tail of
e. With such a labelling an assignmentA(P)associated with each directed path ofZ
is simply the set of literals labelling the edges ofP. The satisfying assignments of the function computed byZ are precisely those that are extensions ofA(P)for pathsP
from the root to thetrueleaf.
It is not hard to see that for any function that is not constantf alse,NROBPcan be thought as a special case ofAROSRN. Indeed, with edges labelled by literals as specified in the previous paragraph, remove the labels from the vertices, remove thef alseleaf as well as all nodes ofZfrom which thtrueleaf is not reached and the obtained graph is anAROSRNcomputing exactly the same function asZ.
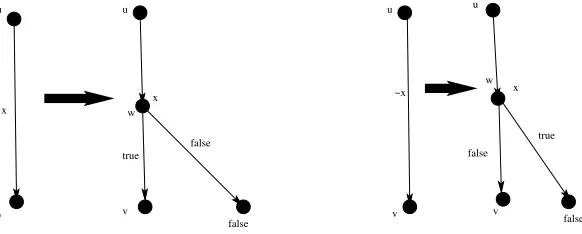
Conversely, anAROSRNcan be transformed into aNROBPas follows. Denote the only leaf of theAROSRNas thetrueleaf and introduce a new node to be thef alseleaf. Then for each edge(u, v)labelled with a literalx, apply the following transformation.
– Subdivide(u, v)by introducing a new nodewand edges(u, w)and(w, v)instead (u, v).
– Introduce a new edgeefromwto thef alseleaf.
– LabelwbyV ar(x), the variable ofx.
– Ifxis the positive literal then label(w, v)withtrueandewithf alse. Otherwise, label(w, v)withf alseandewithtrue.
The transformation of labeled edges is illustrated in Figure 5.
u
v
u
v w
x
x x
~x
true
false true
false u
v
u
v w
[image:19.612.137.428.441.558.2]false false
Fig. 5.Transformation of a labelled edge of anAROSRN.
It is not hard to see that there is a bijection between root-leaf paths of theAROSRN