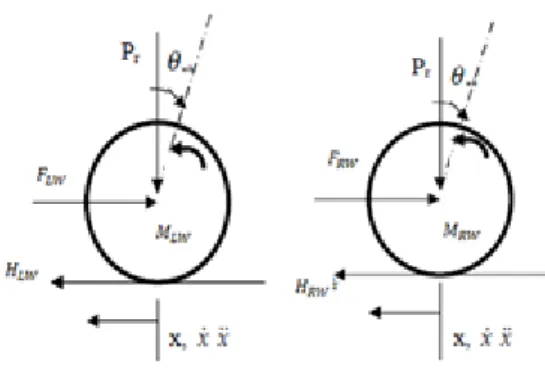
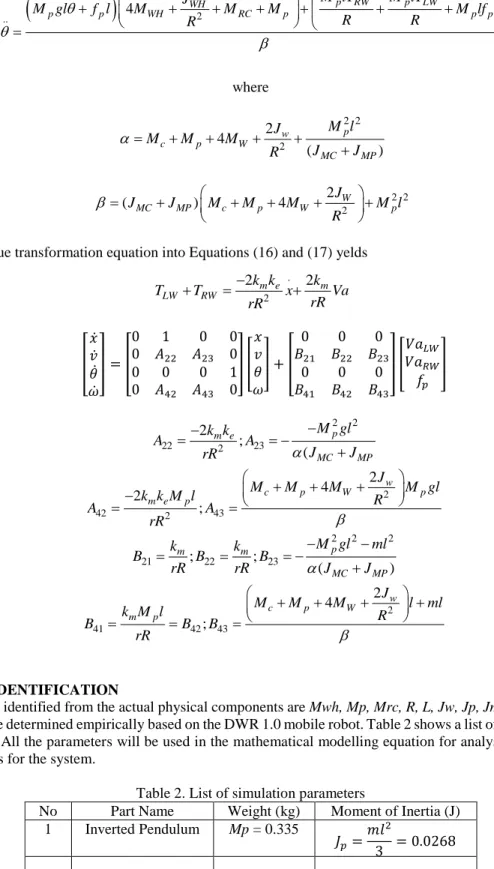
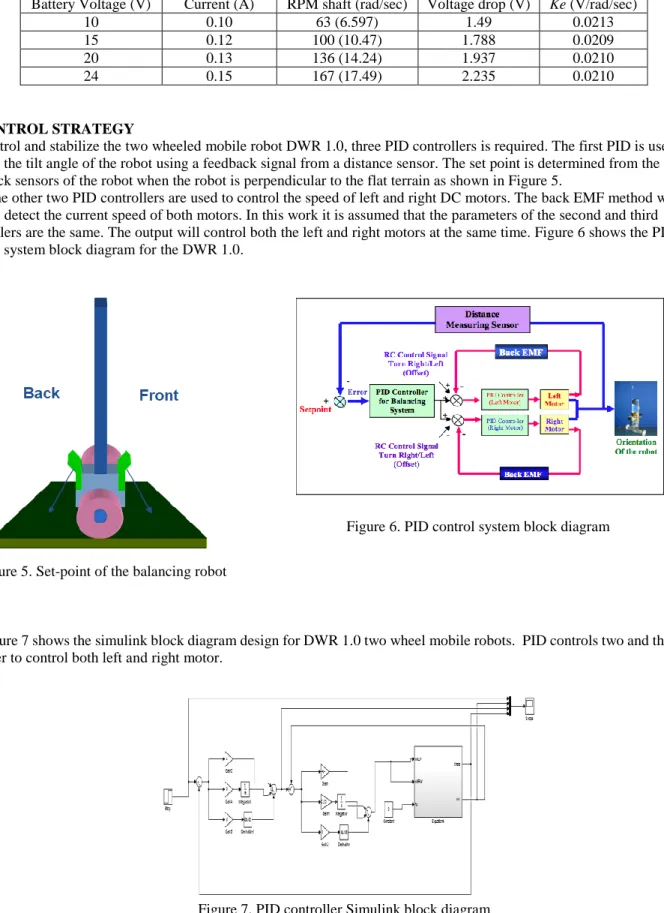
Modelling and control of DWR 1.0 – a two wheeled mobile robot
Full text
Figure


Related documents
This model posits four types of health beliefs that affect an individual’s health behavior, in this case, the decision to seek mental health services: perceived
[3] NEST’s primary goals are to read in ESA and third part SAR data products, provide tools for calibration, orthorectification, co-registration, interferometry,
The current research describes the adaptation of an informant-rating instrument (the Extreme Demand Avoid- ance Questionnaire; O’Nions et al. 2014b ; EDA-Q) for use as a
Then the relationship will be used to assess whether the prevalence of future reporting never smoking for recanters depends on (1) the joint effect of the respondent type (self,
Rajendran, Narayanan and Mazhawidza, William (2011) "Phylogenomic-Based Case Study: An Undergraduate Research Pedagogy at Kentucky State University, the Only Historically
The Nebraska Department of Roads will receive sealed bids in Room 104 of the Central Office Building at 1500 Hwy.. The Department reserves the right to change these quantities
The objective of the study was to compare the acute upper body performance and rating of perceived exertion (RPE) responses to high-volume (HV) and high-intensity
Performance of bridges at the demand, damage, and loss levels can be evaluated using the Pa- cific Earthquake Engineering Research (PEER) Center’s probabilistic
