2018 3rd International Conference on Information Technology and Industrial Automation (ICITIA 2018) ISBN: 978-1-60595-607-7
The Design and Realization of Multi-functional
Intelligent Recognition Robot
Lejiang Guo, Fangxin Chen, Wenjie Tu, Yahui Hu and Lei Xiao
ABSTRACT
With the deepening impact of machine technology marked by information technology on various fields, it has greatly changed the people live and work way. In this paper, combining with artificial intelligence technology, it deeply studies the image feature extraction, the speech recognition and mechanical control technology, and then it designs an intelligent robot which integrates video acquisition, audio-visual transmission, mechanical transmission and motion control. It realizes the functions of autonomous perception, decision-making and feedback. After experiment, the intelligent robot achieves the design goal.1
INTRODUCTION
Language and arm are the most natural and convenient tools for human communication and action. If combining speech recognition technology with the principle of the robot arm, it will create a robot with artificial intelligence. It can execute orders issued by people by flexible completion of various technical actions. it can also bring many conveniences to the human daily lives, such as the battlefield environment, robot can also be efficient with people's combat instead of some dangerous actions.
THE DESIGN METHOD OF INTELLIGENT ROBOT
Based on the embedded storage chip, the design is achieved the design from the following aspects. Using voice control technology to realize the operation of
1
wireless remote control microcontroller in human language, it can control the free movement of the car. This process requires us to record and play the voice, and then compress and encode the collected voice. As speech recognition, it is the key of the design. The computer software programming is used to control the work of the robot arm in wireless communication mode. In order to make data transmission more reliable and safety, the design uses wireless digital communication module because its communication protocol can be set by itself. The communication frequency can also be changed in a certain range [1]. This is the key to the realization of robot manipulator. Peripheral circuit design includes power supply circuit, MIC input circuit, audio output circuit, wireless transmission circuit, reset circuit, I/O interface circuit. These circuits are the basis of the design. With online web controller, there are many related circuits which can be used to reduce the difficulty of the design. The compilation of control program is the difficulty of this design. By the carefully checking code, the compilation and proofreading of the program will be completed. If solving the above key technologies and design difficulties, the design can achieve the desired functional definition and performance indicators.
THE KEY TECHNOLOGIES AND MAIN FEATURES
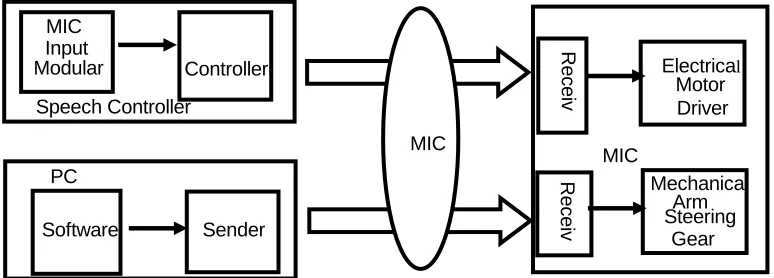
The Controller selection is to compare single-chip microcomputer in many models, the single-chip microcomputer is selected. In Fig.1, SPCE is a sixteen-bit microcontroller developed and manufactured by Science and Technology. It is very convenient and flexible by using it to realize voice recording and playback system. The chip has 8 channels and 10-bit precision ADC, one of chips is an audio conversion channel, and it has built-in automatic gain circuit for recording [2]. The two channels of 10 precision DAC, only need external power amplifier to complete playback. The instruction system and integrated development environment of 16-bit MCU are easy to learn and use for high efficiency. In the integrated development environment, it supports standard program language, and it can call each other
MIC
Speech Controller
PC cop
Software Sender
[image:2.612.98.485.516.655.2]between C languages and assemble language. Voice recording and playback can be realized only by calling the corresponding library functions. After selecting the processor, the principles of workflow is further studied. Feature extraction is to extract feature parameters of reactive speech and form feature vector sequence [3]. Speech model library is a speech parameter template which is extracted from repeated speech by one or more speakers. Matching detection, comparing the input speech feature parameters with the speech model library to get the recognition results.
[image:3.612.130.464.376.562.2]It combines A/D, encoding algorithm, decoding algorithm, storage and D/A into a corresponding module. Each module has its application program interface API. To realize voice processing, it only need to understand the function and parameters of each module, and then call the API function. Robot platform construction is considered the usability, so we have adapted the maneuverability to remote control and voice control. The peripheral circuits needed to be added, such as power supply circuit, MIC input circuit, audio output circuit, wireless transmission circuit, reset circuit, I/O interface circuit [4].In Fig.2, Power supply circuit is the whole system provides power, it usually uses a system-supporting battery box for power supply is 12V. In order to solve the problem of excessive power, it is divided the switch into four power modules. They are remote control, voice control, video and steering gear.
Figure 2. Recognition flowchart.
Start Start
Initial RAM
Execute training,
Gaining result
Return
Training Process N
Time collecting sample of sound
Return
Interrupt services
Sound character modular
Initial recog nizer
Recognized result
Recognize command
Operator action
Return
N
Recognize Process Training
Success
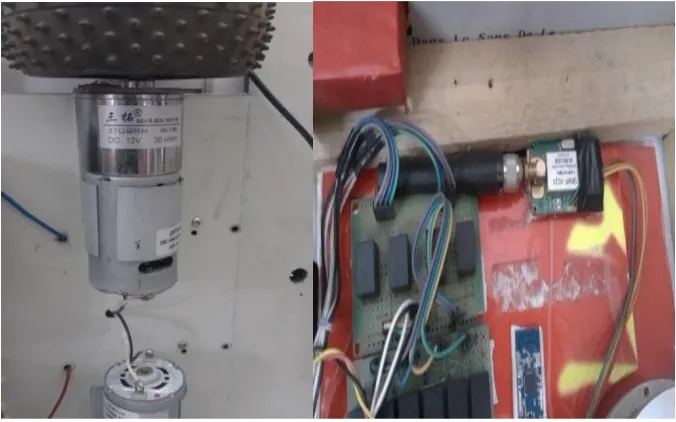
Figure 3. TD-DC motor. Figure 4. Wireless communication modular.
Transmission circuit and audio area includes the microphone used for voice input, there is a speaker interface for voice playback. All control box SPCE and peripheral which is the whole board of the brain in Fig.3.
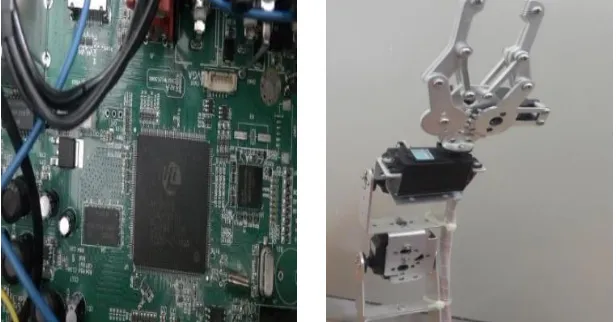
Additional circuitry is considered from the performance and team capability of the entire robot, it installed four cameras on the platform, two of devices were integrated in the steering gear to achieve controllability [5]. In Fig.4, the control box has a small liquid crystal display for video display. The two panels can be opened and closed by wireless remote control to achieve the integration of the whole system. Program circuit of the program is downloaded to SMCU through the interface of online debugging which can also upload some hardware information to the development environment. In Fig.5, Port Zone is used for external hardware control, or to obtain some state of external hardware for SPCA to process.
Figure 5. Modular structure. Figure 6. Robotic and steering structure.
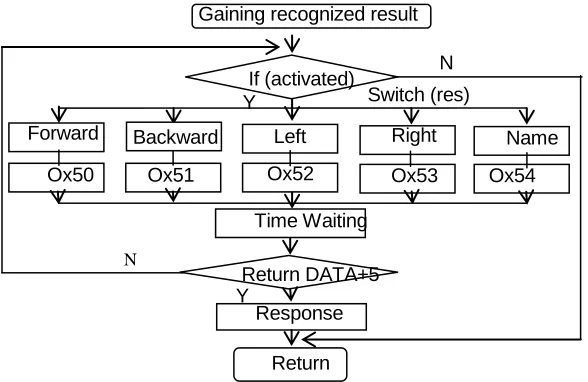
Figure 7. Operation flow chart.
CONCLUSION AND PROSPECTS
The robot is a multi-functional platform with wide application prospects. For example, the current space exploration, medical treatment, military operations or dangerous occasions, it can be used as a reference platform to achieve the purpose of use. The multi system integration constraints because it added cameras and remote control. The device needs the manufacturing difficulty which is also very big due to the limitation of funds and time. The actual funds exceeded a lot, so the performance of the robot has not yet reached the greatest development. After integrating more programs, it can better understand and perfect communicative project.
REFERENCES
1. Weihua Sheng, Anand Thobbi, Ye Gu. 2015. “An Integrated Framework for Human–Robot Collaborative Manipulation,”IEEE Transactions on Cybernetics, 45(10): 2030-2041.
2. Pierre Rouanet, Pierre-Yves Oudeyer, Fabien Danieau, David Filliat. 2013. “The Impact of Human–Robot Interfaces on the Learning of Visual Objects,” IEEE Transactions on Robotics, IEEE Transactions on Robotics, 29(2): 525-541.
3. Takaya Ohyama, Yoshinori Kobayashi, Keiichi Yamazaki, Yasutomo Maeda, Yoshinori Kuno, Shun Miyazawa, Keiko Ikeda, Chiaki Mori, Rio Fujita, Akiko Yamazaki, 2012. “Implementing Human Questioning Strategies into Quizzing-Robot,”2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 423-424.
4. Yoshinori Kobayashi, Yoshinori Kuno, Masahiko Gyoda, Keiichi Yamazaki, Yukiko Seki, Tomoya Tabata, Momoyo Shibuya. 2011. “Assisted-Care Robot Dealing with Multiple Requests
Gaining recognized result
If (activated)
N
Y
Y
N
Return Response Return DATA+5
Time Waiting
Switch (res)
Forward Left Right Name
Ox51 Ox52 Ox53 Ox54
Ox50