2018 2nd International Conference on Modeling, Simulation and Optimization Technologies and Applications (MSOTA 2018) ISBN: 978-1-60595-594-0
An Advanced Ant Colony Algorithm for Constrained Multi-objective
Optimization Problem
Yan-mei LUO and Guo-yan YU
*School of mechanical and power engineering, Guangdong Ocean University, Zhanjiang 524088, China
*Corresponding author
Keywords: Constrained optimization, Multi-objective optimization, Ant colony algorithm, chaos.
Abstract. Most of the existing multi-objective optimization algorithms focused on how to transform the multi-objectives into single objective, while little consideration was given on how to deal with constraint condition. To deal with this problem, an improved ant colony optimization algorithm is proposed in this paper. Logistic chaos is used to initialize the group, which makes the pheromone concentration difference on each path at the initial time, provided direction guidance for ants at the beginning of searching and improved search efficiency. Furthermore, the idea of Pareto sorting is used to sort the feasible solution, and get the Pareto solution set. The numerical experiments show that the proposed algorithm achieves significantly better performance than the others on most of the tested problems, which indicates the superiority of the proposed algorithm for solving constrained multi-objective optimization problems (CMOPs).
Introduction
In today's scientific research and engineering field, decision makers need to consider more factors, deal with more complex problems, and it often involve the simultaneous optimization of several intrinsically conflicting objectives. Generally, there is no single perfect solution that satisfies all the objectives simultaneously because they are intrinsically in conflict with each other. Mathematically, this type of problem can be formulated as a multi-objective optimization problem.
The multi-objective optimization problems, for example, traveling salesman (TSP) problem [1], vehicle scheduling [2-3], workshop scheduling [4-5], and IP backtracking (IPTBK) [6] are all difficult to be solved by traditional methods. A variety of intelligent algorithms with characteristics of distributed computing, positive feedback mechanism and strong robustness are effective methods to solve such problems.
not only reduces the time complexity of the algorithm but also produces better results on the given objectives. In addition, to makes full use of the advantages of each intelligent algorithm to improve the performance of the algorithm, some other is also combined ACO with particle swarm optimization (PSO) [7], neighborhood search algorithm (NS) [16], artificial bee colony algorithm (ABC) [17-18], simulated annealing algorithm (SA) [19] etc.
The above improved ant colony algorithm improves the search efficiency and convergence speed in different degrees. However, when dealing with multi-objective problems, it is generally adopted to transform the multi-objective into single-objective by linear weighting method or sequential method. This approach is simple, but it cannot well balance multiple optimization goals with conflict relations. Therefore, an improved ant colony optimization algorithm is proposed to solve the constrained multi-objective optimization problems in this paper.
The structure of this paper is as follows. Section 2 provides some basic concepts and definitions. Section 3 describes the proposed algorithm and logistic chaotic map. In Section 4, the proposed algorithm is applied to a series of test problems to investigate its feasibility and efficiency. Finally, our conclusions and some possible directions for future research are presented in Section 5.
Basic Concepts and Definitionss
Multi-objective Optimization Problems
In this study, we concentrate on CMOPs which can be represented as follows:
min F(x) = (f1(x), f2(x), … , fn(x))
s. t. {h gi(x) ≤ 0 , i = 1,2, … , q
j(x) = 0 , j = p + 1, … , p (1) Where F(x) = (f1(x), f2(x), … , fn(x)) is an m-dimensional objective vector, andF(x) ∈ Rm.
gi(x) ≥ 0 is an inequality constraint, and 𝑞 is the number of inequality constraints.hj(x) = 0 is an equality constraint, and 𝑝 represents the number of equality constraints. x ∈ Rn is an n-dimensional decision vector.
Pareto Solution Set
In multi-objective optimization problems, Pareto is defined as follows:
Definition 1(Pareto non-dominance) If ∀i ∈ {1,2, … , m}, ui ≤ vi∃j ∈ {1,2, … , m}, makes uj<
vj, then the vector u⃗ = (u1, u2, … , um) dominated the vector v⃗ = (v1, v2, … , vm) , denoted by u⃗ ≺ v⃗ . Definition 2 (Pareto optimality) If and only if there is no xv ∈ X, v⃗ ≺ u⃗ , u⃗ = f x⃗⃗⃗⃗ (uu 1, u2, … , um),
v⃗ = f x⃗⃗⃗ (vv 1, v2, … , vm), then says x⃗⃗⃗⃗⃗ ∈ Xu is the Pareto optimal solutions on the X. Definition 3 (Pareto optimal solution set) X is the set of all Pareto optimal solutions.
Definition 4 (Pareto Front (PF)) The curve (surface) formed by the values of the objective function corresponding to all Pareto optimal solutions.
Proposed Ant Colony Algorithm
Ant Colony Optimization Algorithm
that case, exploration of the solution space would be constrained. Thus, all the ants will choose this path as the shortest path between their colony and food.
When solving optimization problems, ant colony algorithm abstracts the position of food into the point of solution space, represents the potential solution. Let n nodes have directed graph, m ants, the variable 𝑑𝑖𝑗(𝑖, 𝑗 = 1,2, … , 𝑛 ) denotes the distance between node i and j, 𝜏𝑖𝑗(𝑡) denotes the pheromone strength on the path between node i and j at iteration t. At the initial time, the pheromones on each path are equal, that is 𝜏𝑖𝑗(0) = 𝑐(c is constant).
In the process of search, ants according to the information on the each path concentration and heuristic information to calculate the state transition probability of the path, ant k time t moves from node i and j with the following probability:
𝑃𝑖𝑗𝑘(𝑡) = {
𝜏𝑖𝑗𝛼(𝑡).𝜂𝑖𝑗𝛽(𝑡)
∑𝑠 𝜖 𝑎𝑙𝑙𝑜𝑤𝑒𝑑𝑘𝜏𝑖𝑠𝛼(𝑡).𝜂𝑖𝑠𝛽(𝑡), 𝑗 𝜖 𝑎𝑙𝑙𝑜𝑤𝑒𝑑𝑘 ;
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(2)
Where:
𝜏𝑖𝑗(t): The amount of information on the path (i, j) at time t
𝛼 : The relative importance of pheromone trail, (α ≥ 0)
𝛽 : The relative importance of visibility, (β ≥ 0)
𝜂𝑖𝑗(𝑡): The heuristic value 1/dij (the visibility of path (i, j)), where 𝑑𝑖𝑗 is the physical distance between i and j.
𝑎𝑙𝑙𝑜𝑤𝑒𝑑𝑘= [𝐶 − 𝑡𝑎𝑏𝑢𝑘]: The next optional nodes, tabukis the path that the ant is walking. When the ant completes a cycle, the pheromone is updated, and the update rules are as follows:
𝜏𝑖𝑗(𝑡 + 𝑛) = (1 − 𝜌)𝜏𝑖𝑗(𝑡) + ∆𝜏𝑖𝑗(𝑡) (3)
∆𝜏𝑖𝑗(𝑡) = ∑𝑚 ∆𝜏𝑖𝑗𝑘(𝑡)
𝑘=1 (4)
∆𝜏𝑖𝑗(𝑡) = { 𝑄
𝑑𝑖𝑗, 𝑎𝑛𝑡 𝑝𝑎𝑠𝑠 𝑏𝑦 (𝑖𝑗);
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒. (5)
Where,
𝜌 : The pheromone evaporation rate,0 ≤ 𝜌 ≤ 1
∆𝜏𝑖𝑗(𝑡) : The pheromone increment brought about by the node (i, j) in this cycle
∆𝜏𝑖𝑗𝑘(𝑡) : The pheromone strength of the ant k in this cycle
Q: The pheromone strength (A constant).
Logistic Chaotic Map
Chaos is a seemingly random irregular turbulence that occurs in a deterministic system. The behavior of the system described by a deterministic theory is uncertainty, non-repetition and unpredictability, which is the inherent characteristic of nonlinear dynamical systems. It can be expressed as:
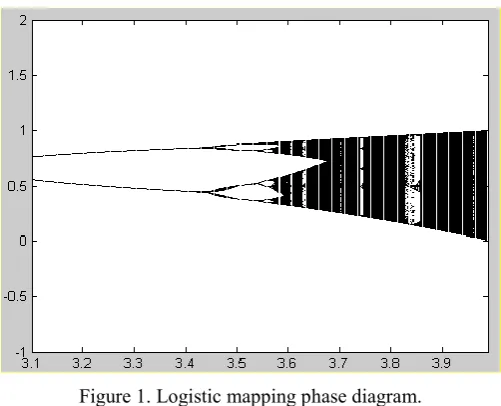
𝑥𝑛+1 = 𝜇𝑥𝑛(1 − 𝑥𝑛), 𝑛 = 0,1,2, … , 𝑛 (6) Where:
n: The number of iterations
𝜇 : The parameter to control the chaotic behavior of the system, whose value is [0, 4]
𝑥𝑛 : A chaotic variable.
Figure 1. Logistic mapping phase diagram.
The above formula is used to generate the initial population, and chaotic ergodicity is used to conduct global search, which overcomes that the basic ant colony algorithm is slow to search because of the pheromone on each path is equal at the initial time.
Proposed Ant Colony Algorithm
In ACO, ant individuals search for food through the communication of pheromones. When ants move randomly, they detect pheromones released by other ants and move along the route, releasing their own pheromones at the same time, which reinforcing the pheromones on the route.
However, if the pheromone concentration on each path is the same at the initial time, the ant will be blindly searching at the first time, which will affect the search efficiency of finding the shortest path. Therefore, logistic chaos is used to initialize the population, so that the initial pheromone concentration on each search path is different. Thus, the ant search direction is guided at the initial stage, the unrelated path is suppressed, the blind search of the ant is avoided, and the search efficiency is improved.
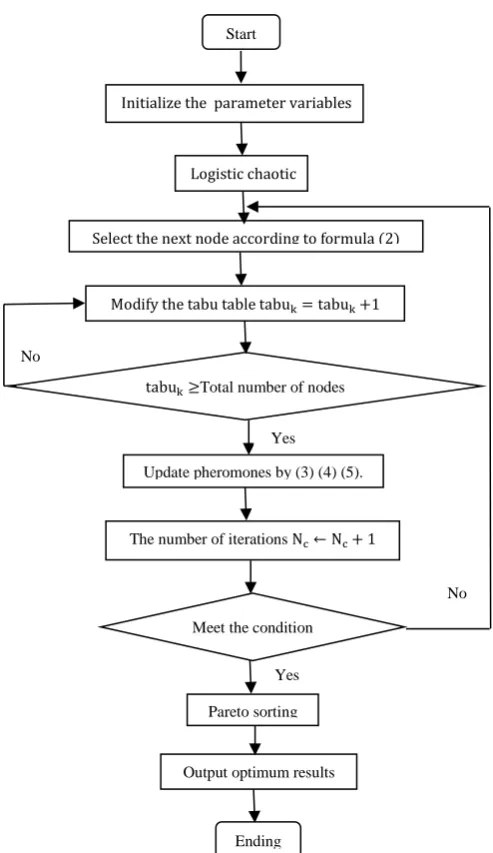
Proposed Algorithm Flow
According to the previous theoretical analysis, the algorithm flow can be described as follows: (1) Parameter initialization process, set the maximum number of cycles 𝑁𝐶𝑚𝑎𝑥, m ants, n node
ants, and the index number of the 𝑡𝑎𝑏𝑢𝐾 is 1.
(2) One dimensional logistic map chaotic formula is used to generate pheromone concentration
𝜏𝑖𝑗(𝑡) on each path at the initial time.
(3) The ant individual selects the next node j according to the probability transfer formula (2), at this time, 𝑗 ∈ {𝐶 − 𝑡𝑎𝑏𝑢𝑘}.
(4) After selecting the next node j, the ant will move and add it to the tabu table 𝑡𝑎𝑏𝑢𝑘=
𝑡𝑎𝑏𝑢𝑘+ 1.
(5) Determines whether traversal is completed. When all nodes are traversed, step 6 is performed, otherwise, step 3 is continued.
(6) The number of cycle is increased by 1, and the pheromone concentration on each path (i, j) is updated according to the formula (3)(4)(5).
(7) Determines whether the program satisfies the end condition. If 𝑁𝐶 ≥ 𝑁𝐶𝑚𝑎𝑥 , the cycle end. Otherwise, clear the tabu table and jump to step 3.
(8) The feasible solution of search is sorted by Pareto sorting, and the result is saved. (9) Output the best results.
Figure 2. Improved ant colony algorithm flow chart.
Algorithm Verification and Result Analysis
Evaluation Indicators and Test Problems
Evaluation Indicators. The interval evaluation S[20] Indicators for measure the degree of algorithm distribution, which is defined as follows:
𝑆 = √𝑛−11 ∑𝑛 (𝑑 − 𝑑𝑖)2
𝑖=1 (7)
Where: 𝑑𝑖 = 𝑚𝑖𝑛𝑗(|𝑓1𝑖𝑥 − 𝑓1𝑗𝑥| + |𝑓2𝑖𝑥 − 𝑓2𝑗𝑥|) i, j = 1,2, … , n
𝑑 = 1 𝑛∑ 𝑑𝑖
𝑛
𝑖=1
The maximum spread range evaluation D [20] The distance between two extreme solutions. The larger the value is, the wider the dissolution distribution range of the algorithm is, which is defined as follows:
Yes Start
Logistic chaotic
Modify the tabu table tabuk= tabuk+1 Select the next node according to formula (2)
tabuk≥Total number of nodes
Update pheromones by (3) (4) (5).
The number of iterations Nc← Nc+ 1
Meet the condition
Pareto sorting
Ending No
Initialize the parameter variables
Output optimum results
𝐷 = √( 𝑓1𝑖 𝑚𝑎𝑥
𝑖=1
𝑛 − 𝑓 1𝑖 𝑚𝑖𝑛
𝑖=1
𝑛 )2+ ( 𝑓 2𝑖 𝑚𝑎𝑥
𝑖=1
𝑛 − 𝑓 2𝑖 𝑚𝑖𝑛
𝑖=1
𝑛 )2 (8)
Test Problems. In this paper, the following constrained multi-objective problems are used for testing and simulation.
F1: 𝑚𝑖𝑛 𝑓1(𝑥) = −𝑥12+ 𝑥2
𝑚𝑖𝑛 𝑓2(𝑥) = 0.5𝑥1+ 𝑥2+ 1
s.t. 𝑥1+ 𝑥2− 13/2 ≤ 0,
𝑥1+ 𝑥2− 15/2 ≤ 0
5𝑥1+ 𝑥2− 30 ≤ 0 0 ≤ 𝑥1 ≤ 7,0 ≤ 𝑥2 ≤ 7.
F2: 𝑚𝑖𝑛 𝑓1(𝑥) = (𝑥1− 2)2+ (𝑥2− 1)2 𝑚𝑖𝑛 𝑓2(𝑥) = 9𝑥1− (𝑥2− 1)2
s.t. 𝑥12+ 𝑥22 ≤ 255
𝑥1− 3𝑥2+ 10 ≤ 0
−20 ≤ 𝑥1 ≤ 20, −20 ≤ 𝑥2 ≤ 20.
F3: 𝑚𝑖𝑛 𝑓1(𝑥) = 4𝑥12+ 4𝑥22
𝑚𝑖𝑛 𝑓2(𝑥) = (𝑥1− 5)2+ (𝑥2− 5)2 s.t. (𝑥1− 1)2+ 𝑥22− 25 ≤ 0
(𝑥1− 8)2+ (𝑥2+ 3)2 ≥ 7.7
0 ≤ 𝑥_1 ≤ 5,0 ≤ 𝑥_2 ≤ 3
Experimental Results and Discussions
The parameters are set as: 𝛼 = 0.5,𝛽 = 0.5,𝜌 = 0.05, 𝑄 = 1, the population size𝑁 = 100, the number of iterations 𝑁𝐶 = 100. Each algorithm ran independently for 15 times. Test environment is Microsoft Windows 10 enterprise edition, 64-bit, processor: Intel(R) Core(TM)i7-7700 CPU @3.60hz, RAM: 8G, programming tool: Matlab2014a.
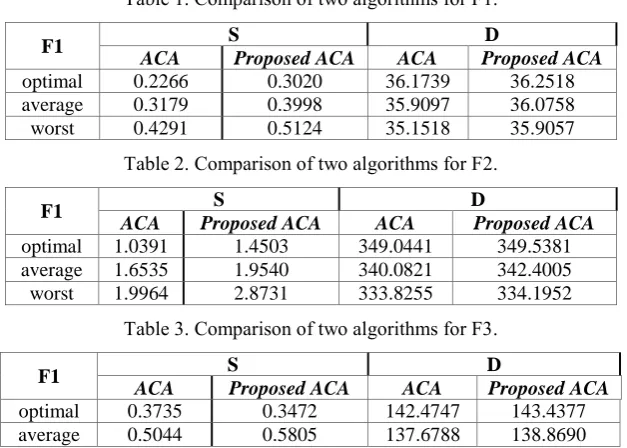
[image:6.595.71.414.76.369.2]Test Results for the Proposed Algorithm and the Basic Algorithm.
Table 1. Comparison of two algorithms for F1.
F1 S D
ACA Proposed ACA ACA Proposed ACA
optimal 0.2266 0.3020 36.1739 36.2518
average 0.3179 0.3998 35.9097 36.0758
worst 0.4291 0.5124 35.1518 35.9057
Table 2. Comparison of two algorithms for F2.
F1 S D
ACA Proposed ACA ACA Proposed ACA
optimal 1.0391 1.4503 349.0441 349.5381
average 1.6535 1.9540 340.0821 342.4005
worst 1.9964 2.8731 333.8255 334.1952
Table 3. Comparison of two algorithms for F3.
F1 S D
ACA Proposed ACA ACA Proposed ACA
optimal 0.3735 0.3472 142.4747 143.4377
average 0.5044 0.5805 137.6788 138.8690
[image:6.595.142.456.482.706.2]feasible solutions are ignored at the beginning. From table 3, the optimal value S of the proposed algorithm is better than the basic algorithm, which reflects the randomness of chaos.
Test Results for the Proposed Algorithm and Other Algorithms. In order to verify the feasibility of the proposed algorithm, it is compared with other algorithms mentioned in the literature.
[image:7.595.78.522.335.486.2]Fig. 3 (a) and Fig. 4 (a) are the results of 500 iterations of test problems F1 and F3 in reference [20]. Fig. 3 (b) and Fig. 4 (b) are the results of 100 iterations of the proposed algorithm. Comparing the test results, we find that the preface of Pareto solutions in the two graphs is basically the same, but the convergence speed of the proposed algorithm is faster.
Table 4. Comparison of algorithm results between F3 and reference [20].
Algorithm Number of
Solutions (n)
Maximum dispersion range (D)
NSGA II 97 115.44
Proposed ACA 113 121.22
As illustrated in table 4, under the same number of iterations and scale, the comparison between the proposed algorithm and the algorithms in reference [20] shows that the number of solutions and the maximum dispersion range obtained by the proposed algorithm are both better, which verifies that the performance of the proposed algorithm has been improved.
3 (a) 3 (b)
Figure 3. Comparison of Pareto between document [20] and algorithm F1 in this paper.
4 (a) 4 (b)
Figure 4. Comparison of Pareto between document [20] and algorithm F3 in this paper.
Conclusion
[image:7.595.74.519.513.673.2]end of iteration. By comparing the simulation results of the test problems with those of other literatures, the proposed algorithm improves the maximum dispersion range and convergence of the solution set, and can better reflects the relationship between the goals. However, in the process of experimental research, it is found that the ant colony algorithm research can still be improved. In the future, the proposed algorithm will be further studied, analyzed and proved in theory, and apply it to the engineering field to further verify the effectiveness of the algorithm.
Acknowledgment
This work is financially supported by the science and technology planning project of Guangdong province and Zhanjiang city (2014A020208118, 2016A02018, 2017A03005), and Guangdong graduate education innovation project (2016QTLXXM_52).
References
[1] Mavrovouniotis M, Muller F M, Yang S. Ant Colony Optimization With Local Search for Dynamic Traveling Salesman Problems [J]. IEEE Transactions on Cybernetics, 2017, 47(7):1743-1756.
[2] Can B. Kalayci,Can Kaya. An ant colony system empowered variable neighborhood search algorithm for the vehicle routing problem with simultaneous pickup and delivery [J]. Expert Systems With Applications, 2016, 66:163-175.
[3] Mohamed M.S, Abdulkader, Yuvraj Gajpal, et al. Hybridized ant colony algorithm for the Multi Compartment Vehicle Routing Problem [J]. Applied Soft Computing, 2015, 37: 196-203.
[4] Rong-Hwa Huang, Tung-Han Yu. An effective ant colony optimization algorithm for multi-objective job-shop scheduling with equal-size lot-splitting [J]. Applied Soft Computing, 2017, 57: 642-656.
[5] Fatima El Khoukhi, Jaouad Boukachour, Ahmed El Hilali Alaoui. The “Dual-Ants Colony”: A novel hybrid approach for the flexible jobshop scheduling problem with preventive maintenance [J]. Computers and Industrial Engineering, 2017, 106: 236-255.
[6] Ping Wang, Hui-Tang Lin, Tzy-Shiah Wang.An improved ant colony system algorithm for solving the IP traceback problem [J]. Information Sciences.2016, 326: 172-187.
[7] M. Kefayat, A. Lashkar Ara, S.A. Nabavi Niaki, A hybrid of ant colony optimization and artificial bee colony algorithm for probabilistic optimal placement and sizing of distributed energy resources [J]. Energy Conversion and Management, 2015, 92:149-161.
[8] P. Shunmugapriya, S. Kanmani. A hybrid algorithm using ant and bee colony optimization for feature selection and classification (AC-ABC Hybrid) [J]. Swarm and Evolutionary Computation. 017, 36: 27-36.
[9] Yuan Yabo, Liu Yi, Wu Bing. Improved ant colony algorithm for solving the shortest path problem [J]. Computer Engineering and Applications, 2016, 52(6):8-12.
[10]Li Zheng, Gu Wenchan, Zhang Hongliang, et al. Path guidance algorithm based on improved ant colony algorithm [J]. Computer Measurement and Control, 2015, 23(4):608-612.
[11]Zeng Mingru, Xu Xiaoyong, Luo Hao, et al. Robot path planning based on multi step ant colony algorithm [J]. Small Nicrocomputer System, 2016, 37(2):366-369.
[13]Lin Na, Liu Erchao. Dynamic route planning of UAVs based on improved ant colony algorithm [J]. Computer Measurement and Control, 2016, 24(3):149-153.
[14]Ke Ye, Changsheng Zhang, Jiaxu Ning, et al. Ant-colony algorithm with a strengthened negative-feedback mechanism for constraint-satisfaction problems [J]. Information Sciences, 2017, (406–407), 29-41.
[15]Pawan Kumar Tiwari, Deo Prakash Vidyarthi. Improved auto control ant colony optimization using lazy ant approach for grid scheduling problem [J]. Future Generation Computer Systems. 2016, (60):78-89.
[16]Jin Chun, Zhang Yu, Wang Chong. A distributed multiple agent ant colony algorithm for vehicle routing problem with time windows [J]. Computer Application Research, 2018, 35(3):1-6.
[17]M. Kefayat, A. Lashkar Ara, S.A. Nabavi Niaki, A hybrid of ant colony optimization and artificial bee colony algorithm for probabilistic optimal placement and sizing of distributed energy resources [J]. Energy Conversion and Management, 2015, 92:149-161.
[18]P. Shunmugapriya, S. Kanmani. A hybrid algorithm using ant and bee colony optimization for feature selection and classification (AC-ABC Hybrid)[J]. 2017, 36:27-36.
[19]Rafał Skinderowicz. An improved Ant Colony System for the Sequential Ordering Problem [J]. Computers and Operations Research, 2017, 86:1-17.
![Table 4. Comparison of algorithm results between F3 and reference [20].](https://thumb-us.123doks.com/thumbv2/123dok_us/259268.1026043/7.595.74.519.513.673/table-comparison-algorithm-results-f-reference.webp)
